Изобретение относится к способам охранного мониторинга участка местности обрывным рефлектометрическим средством обнаружения (СО) и можем быть использовано в случаях сигнализационного прикрытия участка местности, обрывным СО, определяющим расстояние до места обрыва микропровода (МП) на основе рефлектометрического метода.
Успех задержания нарушителя на местности зависит от знания силами реагирования направления его движения. Поэтому сигнализационному прикрытию участка местности с возможностью определения направления движения уделяется значительное внимание. Как правило, охрана участков длинной несколько сотен метров и более осуществляется мобильными быстроразвертываемыми СО с протяженной линейной частью. Например, СО, определяющим расстояние до места обрыва МП на основе рефлектометрического метода [1]. При обрыве МП такое СО передает сигнал тревоги на систему сбора и обработки информации (ССОИ), силы реагирования по прибытию на участок снимают показания длины оставшегося подключенным к СО МП (место обрыва МП) с его индикатора для уточнения места нарушения. То-есть, в сложившейся практике охранного мониторинга с использованием рассматриваемых СО указываемая ими длина оставшегося подключенным МП (место обрыва МП) используется силами реагирования только для определения места обрыва [2].
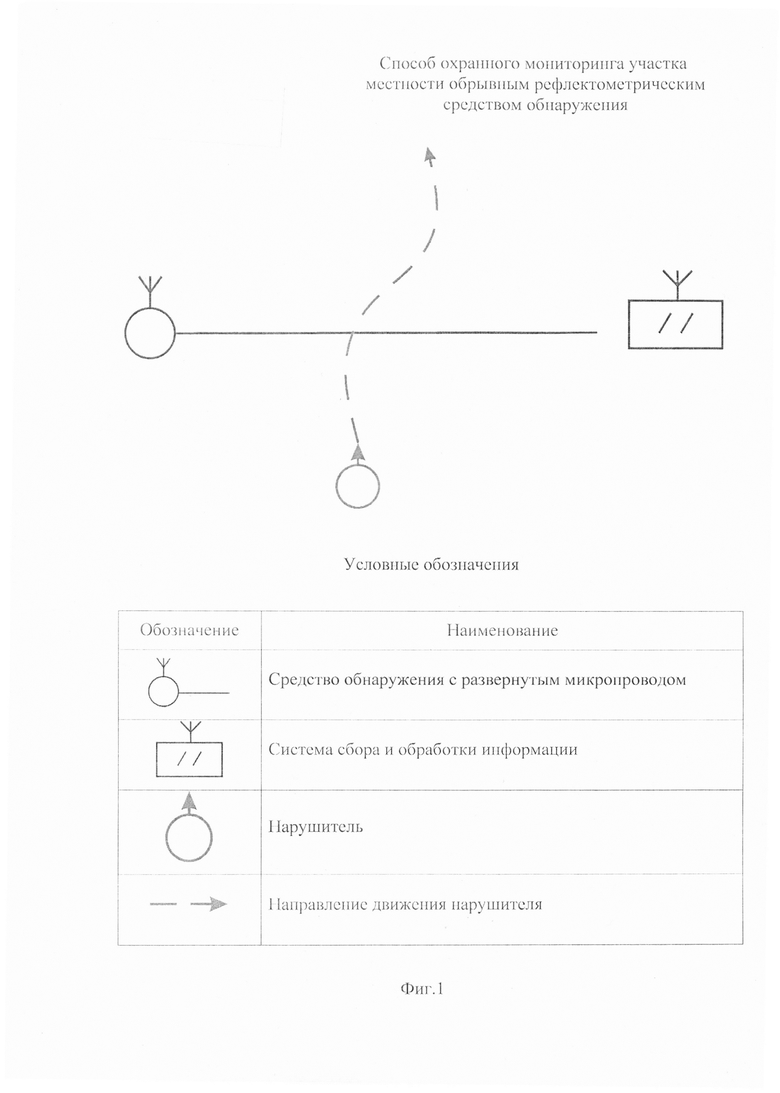
Известен способ охранного мониторинга участка местности обрывным рефлектометрическим СО, заключающийся в развертывании МП одного СО по прямой и подключении его к СО; обеспечении передачи сигнала тревоги от СО на ССОИ при обрыве нарушителем МП; определении СО длины оставшейся части МП, подключенного к нему; прибытии сил реагирования на участок и снятие показания длины оставшейся подключенным к СО части МП с его индикатора для уточнения места нарушения (фиг. 1). [3, 4]
Недостатком этого способа является отсутствие возможности определения направления движения обнаруженного нарушителя.
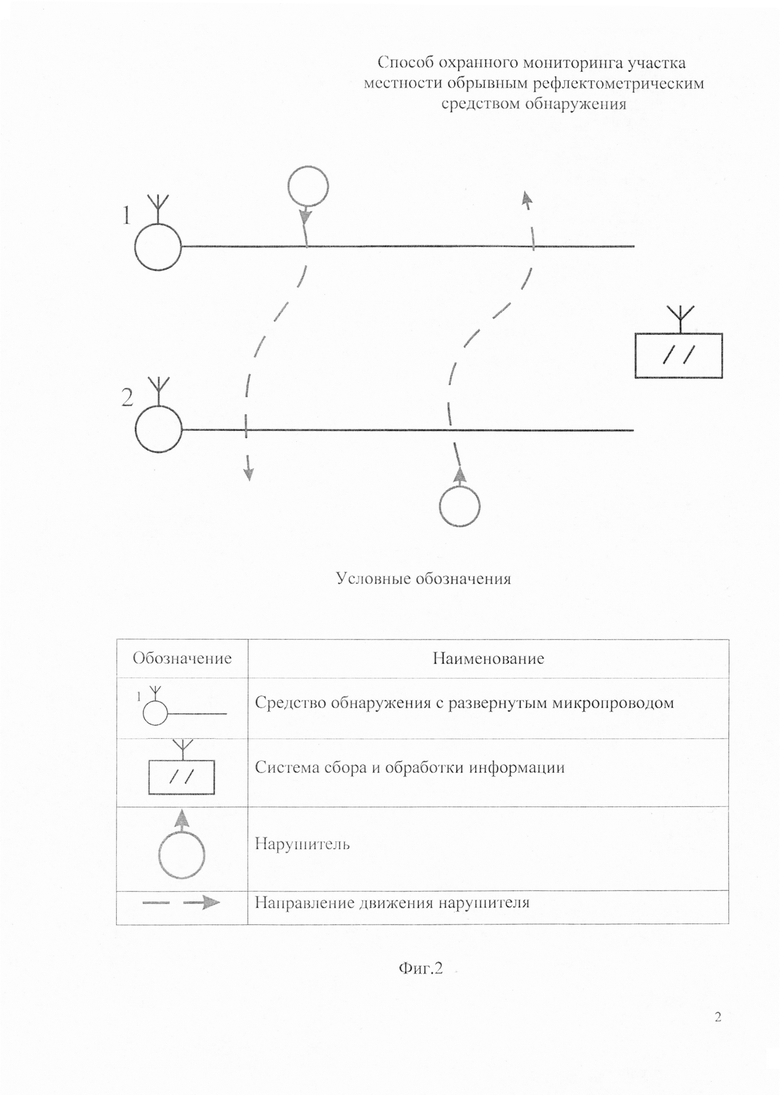
Известен способ охранного мониторинга участка местности обрывным рефлектометрическим СО, заключающийся в развертывании на участке местности МП двух СО в два рубежа и подключении МП к СО; обеспечении передачи сигналов тревоги от СО на ССОИ при обрыве нарушителем МП; применении алгоритма определения стороны движения нарушителя по очередности срабатывания СО; прибытии сил реагирования на участок и снятие показаний длин оставшихся подключенным к СО МП с индикаторов для уточнения мест нарушения (фиг. 2). [3, 4]
Недостатком этого способа является необходимость применения двух СО и низкая информативность о движении нарушителе (указывается только сторона движения).
Стоимость рассматриваемых СО с возможностью передачи информации на ССОИ достаточно высока. Так, например, розничная стоимость отечественного СО - «КСМ - ОС» более 27 тысяч рублей [5]. Поэтому, снижение числа СО, применяемых для охранного мониторинга местности, является экономически целесообразным.
Целью изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
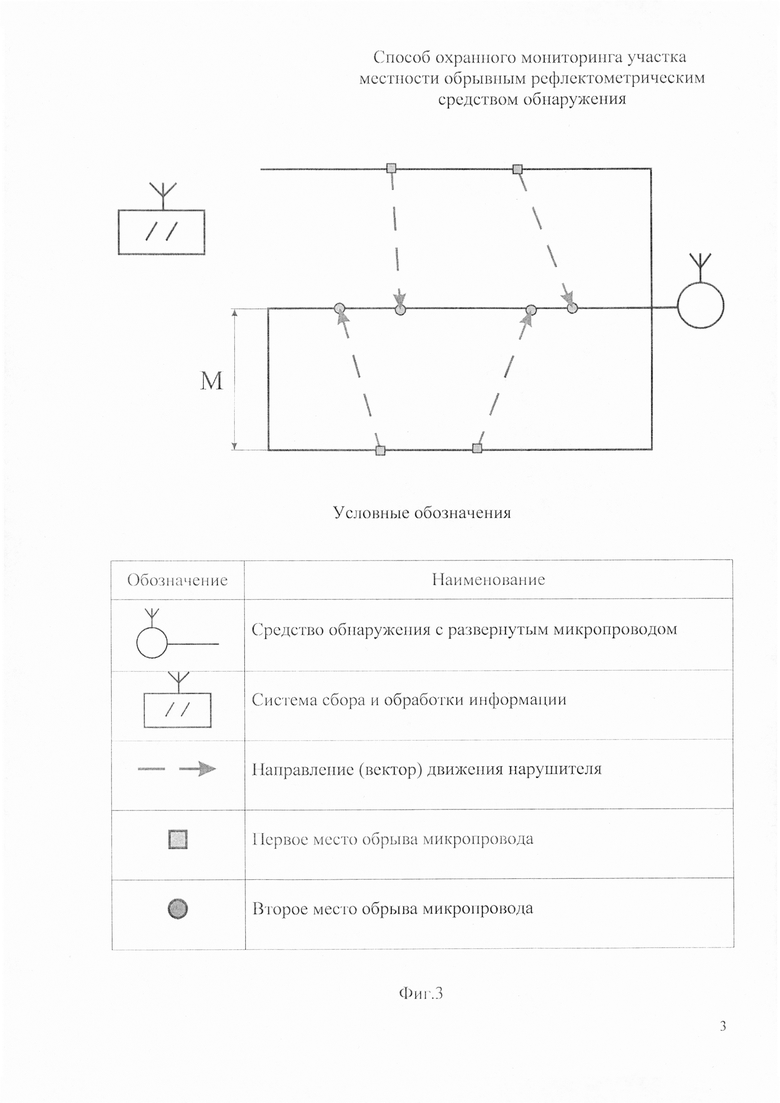
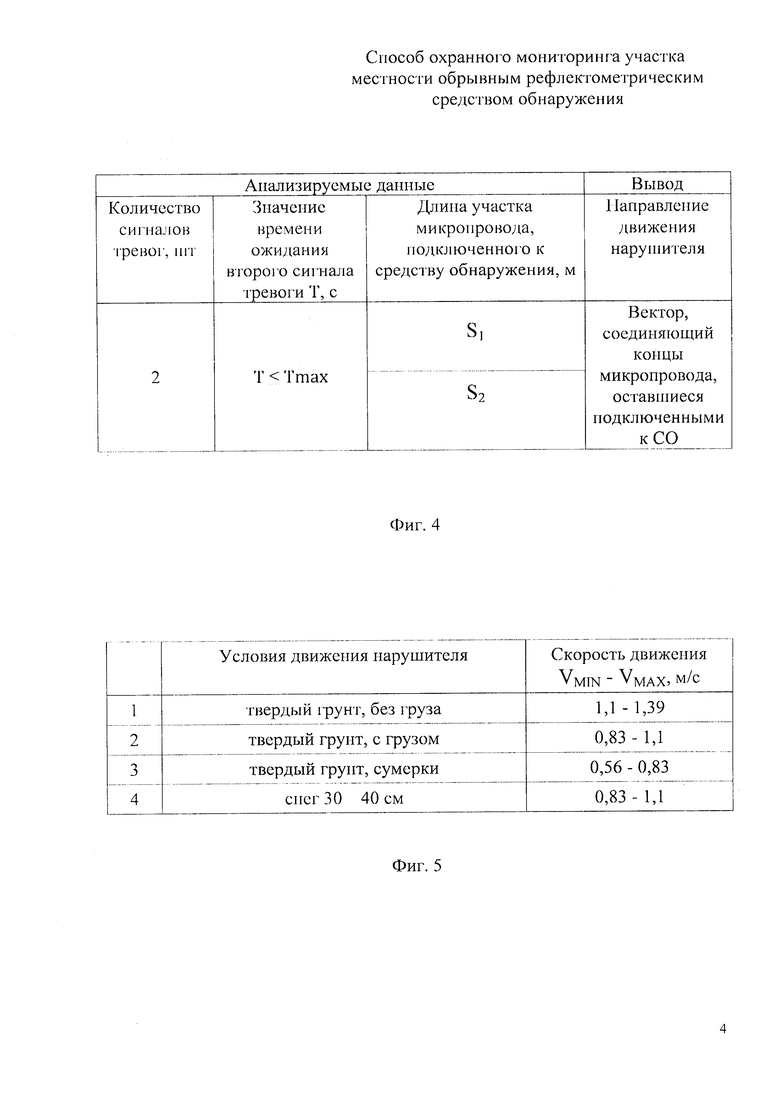
Для достижения поставленной цели разработан способ охранного мониторинга участка местности и обрывным рефлектометрическим средством обнаружения, заключающийся в развертывании МП СО на местности в три рубежа так, чтобы нарушитель при движении по местности пересекал их последовательно; подключении первым к СО рубежа, находящегося между двумя другими рубежами; установлении расстояния между внутренним и внешними рубежами не менее двух расстояний, которые нарушитель может пройти по местности с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим; обеспечении передачи сигналов тревог от СО на систему сбора и обработки информации при обрыве нарушителем МП; определении времени ожидания поступления второго сигнала тревоги в зависимости от расстояния между внешними рубежами и минимально возможной скоростью движения нарушителя; передаче вместе с двумя последовательно поступающими сигналами тревог от СО на систему сбора и обработки информации значений длин частей МП, оставшихся подключенными к СО; применении алгоритма определения направления движения нарушителя, в котором направление движения определяется как вектор, соединяющий на схеме развертывания МП концы МП, оставшиеся подключенными к СО; началом вектора является первое место обрыва МП, конец вектора - второе место обрыва (фиг. 3, 4).
Начало движения нарушителя возможно с одной из двух сторон сигнализационного рубежа. Если МП развернуть только в два рубежа, то при обрыве рубежа, лежащего ближе к СО, сигнал тревоги от второго рубежа не поступит, так как СО сохраняет работоспособность только с оставшейся подключенной к нему частью МП [4]. В свою очередь, чтобы определить направление движения (построить вектор), необходимо знать два местоположения объекта, установленных в течение определенного времени. Поэтому МП СО разворачивается по предложенной схеме в три рубежа. Тогда, вне зависимости от направления движения нарушителя количество сигналов тревог, поступивших на ССОИ от СО, будет равно двум. При обрыве одного из двух внешних рубежей по длине микропровода, оставшегося подключенным к СО (S1), определяется первое местоположение объекта. После обрыва МП внутреннего рубежа по длине микропровода, оставшегося подключенным к СО (S2), определяется второе местоположение объекта. Вектор, соединяющий места обрывов микропровода, будет являться направлением движения нарушителя (фиг. 3, 4).
Стоимость МП, представляющего собой эмаль-провод диаметром 1-2 мм на два порядка меньше стоимости самого СО (300 рублей - 1 км) [6]. Поэтому, подход, в котором число СО снижается, за счет увеличения длины МП, экономически целесообразен.
Своевременный автоматический переход СО в дежурный режим из режима тревоги после первого обрыва МП обеспечивается заданным расстоянием между внутренним и внешними рубежами МП. Это расстояние должно быть не менее двух расстояний, которое нарушитель может пройти по местности с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим.

где М - расстоянием между внутренним и внешним рубежом МП, м.
t - время перехода СО из режима тревоги в дежурный режим, с.
VMAX - максимальная скорость движения нарушителя по дороге, м/с.
Максимально возможная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5). [7, 8]
Так же, для исключения ошибок вывода, устанавливается максимальное времени ожидания поступления второго сигнала тревоги (TMAX).

где Т - время между двумя сигналами тревог, поступивших от СО
TMAX - максимальное время ожидания второго сигнала тревоги, с.
Максимальное время ожидания поступления второго сигнала тревоги определяется расстоянием между внутренним и внешним рубежом и минимальной скоростью движения нарушителя и берется с запасом 1,2. Расчет производится по формуле:

где VMIN - минимальная скорость движения нарушителя по дороге, м/с.
Минимальная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5). [7, 8]
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
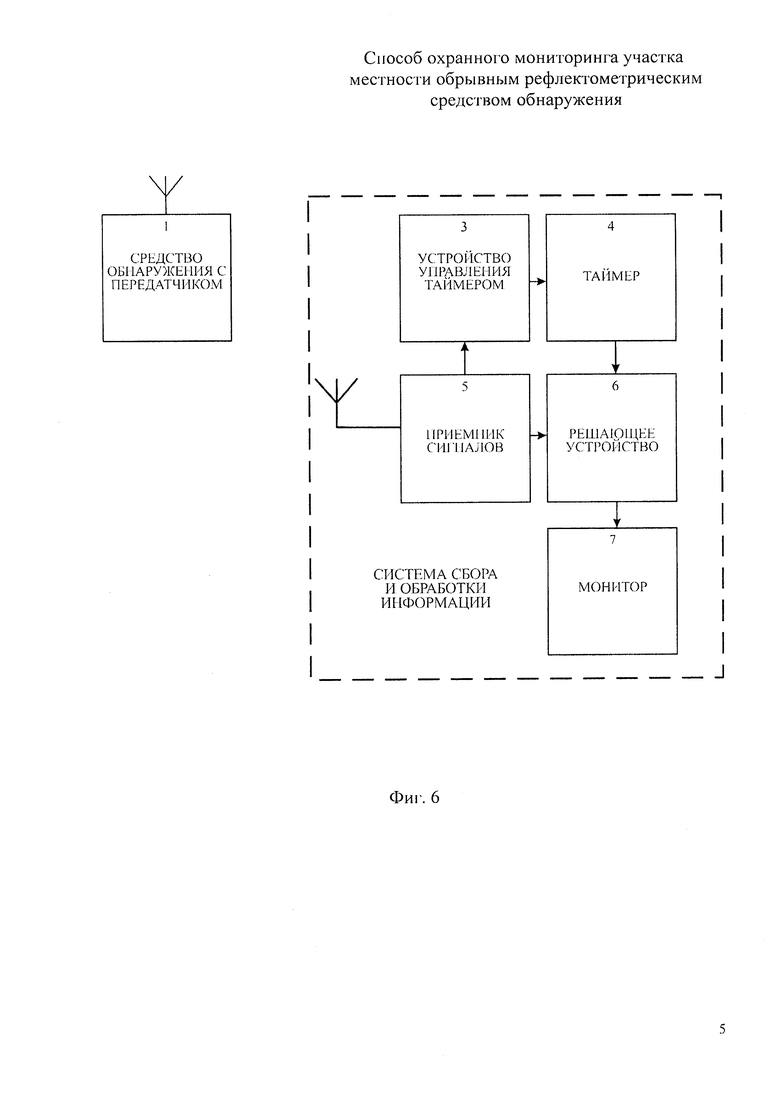
1. Развертывание МП по установленной схеме и подключение его к средству 1 обнаружения с передатчиком (фиг. 2, 6).
2. Развертывание на местности системы сбора и обработки информации, включающей в себя приемник 5 сигналов, устройство 3 управления таймером, таймер 4, устройство 6 решающее и монитор 7 (фиг. 6).
3. Расчет максимального значения времени накопления сигналов тревог (TMAX) и загрузку его в решающее устройство 6 (формула 3).
4. Запись в устройство 6 решающее алгоритма определения направления движения нарушителя (фиг. 4).
5. Начало работы средства 1 обнаружения с передатчиком в дежурном режиме (фиг. 4).
Основной этап начинается при обрыве нарушителем одного из внешних рубежей МП, он включает:
1. Переход средства 1 обнаружения с передатчиком в режим тревоги и передачу им сигнала тревоги и длины оставшейся части подключенного к нему микропровода на ССОИ (фиг. 6).
2. Регистрацию приемником 5 сигнала тревоги от средства 1 обнаружения с передатчиком, запуском таймера 4 устройством 3 управления таймером, начало отсчета им времени ожидания поступления второго сигнала, тревоги (Т) (фиг. 6).
3. Запись длины оставшейся части микропровода, подключенного к средству обнаружения 1 с передатчиком в устройство 6 решающее (фиг. 6).
4. Автоматически переход средства 1 обнаружения с передатчиком в дежурный режим (фиг. 6).
5. Обрыв нарушителем микропровода на втором (внутреннем) рубеже МП (фиг. 3).
6 Регистрацию приемником 6 второго сигнала тревоги от средства 1 обнаружения с передатчиком, остановкой таймера 4 устройством 3 управления таймером (фиг. 6).
6. Запись длины оставшейся части МП, подключенного к средства 1 обнаружения с передатчиком в устройство 6 решающее (фиг. 6).
7. Определение алгоритмом, записанным в устройство 6 решающее, направления движения нарушителя (фиг. 4).
8. Обнуление таймера 4 устройством 3 управления таймером. Выведение результата о нарушения на монитор 7 (фиг. 6).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 схема развертывания МП в известном способе охранного мониторинга участка местности с применением одного СО
- фиг. 2 схема развертывания МП в известном способе охранного мониторинга участка местности с применением двух СО
- фиг. 3 схема развертывания МП в предлагаемом способе охранного мониторинга участка местности;
- фиг. 4 алгоритм определения направления движения нарушителя (таблица принятия решения);
- фиг. 5 таблица интервалов скоростей нарушителя в зависимости от условий местности;
- фиг. 6 структурная схема взаимосвязи применяемых устройств при реализации способа.
Техническим результатом изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов, Т.А. Технические средства охраны границы: учебник/ Т.А. Маршалов, А.В. Густов, И. М. Потапов. Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Средство обнаружения обрывное «КСМ-ОС». Паспорт БАЖК. 425112.002 ПС. - 21 с.
5. О стоимости [Электронный ресурс] / «Обрывное средство обнаружения». Электрон. дан. - М. «КСМ - ОС», 2017 - Режим доступа: http:///www.stroyportal.ru, свободный. - Заглавие с экрана.
6. О стоимости [Электронный ресурс] / «Провод эмалированный (обмоточный)». - Электрон. дан. - М «ЧИП И ДИП», 2017. - Режим доступа: http://www.chipdip.ru, свободный. - Заглавие с экрана.
7. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
8. Баленко, С.В. Школа выживания. - М., 1994. - 140 с.
Изобретение относится к способам охранного мониторинга участка местности обрывным рефлектометрическим средством обнаружения (СО) и может быть использовано в случаях сигнализационного прикрытия участка местности обрывным СО, определяющим расстояние до места обрыва микропровода (МП). Техническим результатом изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением только одного СО. Способ заключается в обеспечении передачи сигналов тревог (СТ) от СО на систему сбора и обработки информации (ССОИ) при обрыве нарушителем МП; определении времени ожидания поступления второго СТ в зависимости от расстояния между внешними рубежами и минимально возможной скоростью движения нарушителя; передаче вместе с двумя последовательно поступающими СТ от СО на ССОИ значений длин частей МП, оставшихся подключенными к СО; применении алгоритма определения направления движения (НД) нарушителя. 6 ил.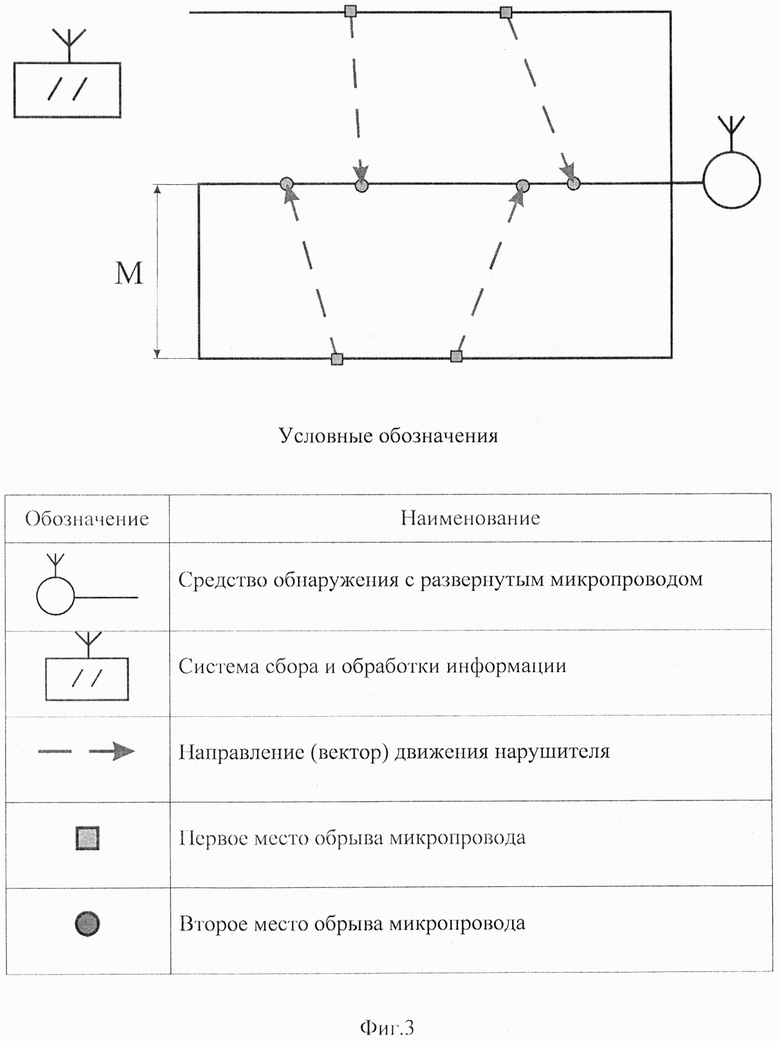
Способ охранного мониторинга участка местности обрывным рефлектометрическим средством обнаружения, заключающийся в развертывании на участке местности микропровода средства обнаружения, в котором применяется рефлектометрический метод измерения длины микропровода, обеспечении передачи сигнала тревоги от средства обнаружения на систему сбора и обработки информации при обрыве нарушителем микропровода, отличающийся тем, что микропровод разворачивается па местности в три рубежа так, чтобы нарушитель при движении по местности пересекал рубежи последовательно; рубеж, находящийся между двумя другими рубежами (внутренний рубеж), подключен к средству обнаружения первым; расстояние между внутренним и внешними рубежами устанавливается не менее двух расстояний, которое нарушитель может пройти по местности с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; вместе с двумя последовательно поступающими сигналами тревог от средств обнаружения на систему сбора и обработки информации передаются значения длин частей микропровода, оставшихся подключенными к средству обнаружения; средство обнаружения после передачи сигнала тревоги переходит в дежурный режим автоматически; применяется алгоритм определения направления движения нарушителя, в котором направление движения определяется как вектор, соединяющий на схеме развертывания микропровода на местности концы микропровода, оставшиеся подключенными к средству обнаружения; началом вектора является первое место обрыва микропровода; концом вектора является второе место обрыва микропровода; максимальное время ожидания поступления второго сигнала тревоги определяется расстоянием между внешними рубежами и минимально возможной скоростью движения нарушителя.
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| US 6271754, 07.08.2001 | |||
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

