Изобретение относится к способам охранного мониторинга с применением обрывного рефлектометрического средства обнаружения (СО) на участке местности с дорогами и может быть использовано в случаях применения СО с микропроводным чувствительным элементом, определяющим расстояние до места обрыва микропровода (МП) на основе рефлектометрического метода [1].
Как правило, для перемещения на местности нарушитель выбирает дороги и тропы, что позволяет ему упростить ориентирование и передвигаться с большей скоростью [2]. Поэтому силы реагирования сигнализационному прикрытию дорог уделяют значительное внимание. Если дорожная сеть проходит через пересеченную местность, покрытую растительностью, то для решения задачи сигнализационного прикрытия применяются средства обнаружения, не требующие специальной подготовки местности, например, средства обнаружения, определяющие расстояние до места обрыва МП на основе рефлектометрического метода [2].
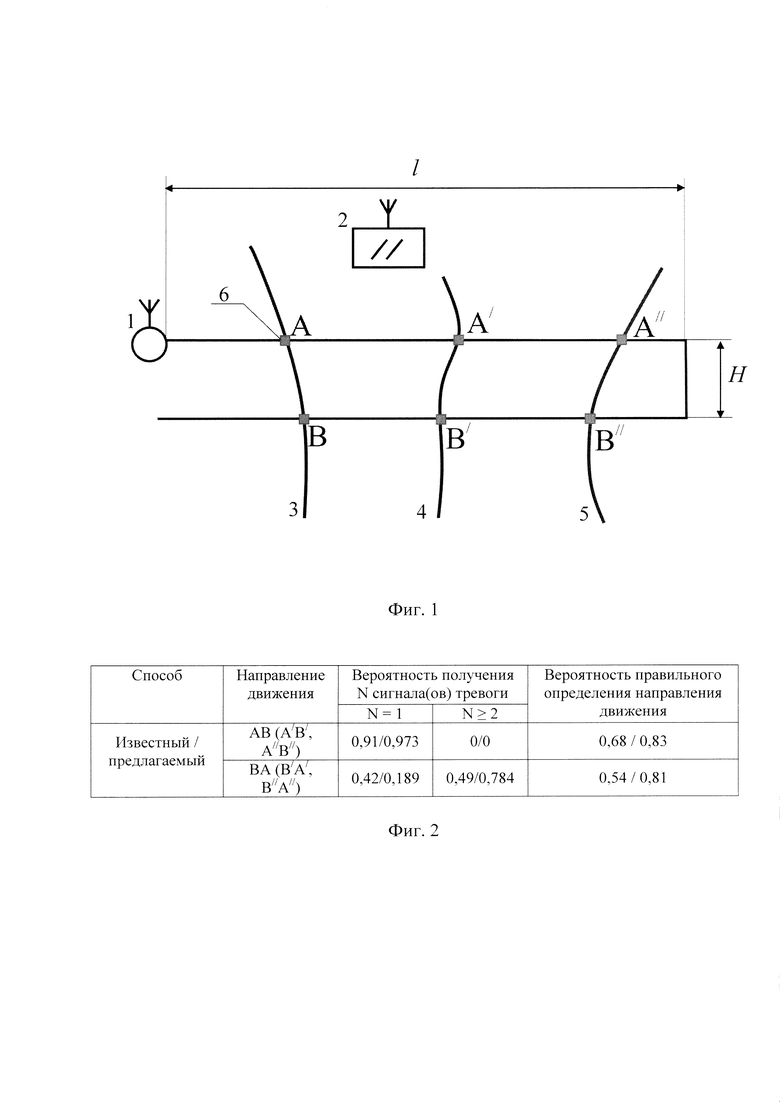
Известен способ охранного мониторинга с применением обрывного рефлектометрического средства обнаружения (фиг. 1 - элемент №1), заключающийся в развертывании на участке местности МП, подключаемого к СО, в несколько рубежей; установлении расстояния между соседними рубежами не менее двух расстояний, которые нарушитель может пройти по местности с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим; определении СО длины оставшейся части МП, подключенного к нему после его обрыва нарушителем; обеспечении передачи сигналов тревог и значений длин МП, остающихся подключенными к СО после обрывов нарушителем МП, на систему сбора и обработки информации (ССОИ) (фиг. 1 - элемент №2); накоплении сигналов тревог от СО с момента получении первого сигнала в течение времени, определяемого расстоянием между внешними рубежами и минимально возможной скоростью движения нарушителя; автоматическом переходе СО в дежурный режим после передачи сигнала тревоги; применении алгоритма определения направления движения нарушителя на основе сравнения полученной длины, МП, подключенного к СО, или комбинации двух полученных длин с априори известными размерами схемы развертывания МП через дороги [3].
Очевидно, что данный способ возможно так же применить на участке местности с непересекающимися дорогами (фиг. 1 - элементы №3-5).
Рассматриваемое СО сохраняет свою работоспособность с оставшимся подключенным к нему после обрыва (фиг. 1 - элемент №6) нарушителем МП [4]. Поэтому при движении нарушителя в направлении ВА ( ) от СО может поступить от одного до двух сигналов тревоги (фиг. 1). В свою очередь, вероятность обрыва развернутого МП нарушителем, передвигающимся на местности без предосторожности равна 0,7 (не обрыва - 0,3) [5].
) от СО может поступить от одного до двух сигналов тревоги (фиг. 1). В свою очередь, вероятность обрыва развернутого МП нарушителем, передвигающимся на местности без предосторожности равна 0,7 (не обрыва - 0,3) [5].
Согласно правилам комбинаторики существует четыре различные комбинации обрыва МП при движении нарушителя в направлении ВА (аналогичные формулы для направлений  ) (фиг. 1) [6]:
) (фиг. 1) [6]:
где  ,
, - вероятность обрыва МП в точке А и в точке В,
- вероятность обрыва МП в точке А и в точке В,
соответственно;
 ,
, - вероятность не обрыва МП в точке А и в точке В,
- вероятность не обрыва МП в точке А и в точке В,
соответственно;
0,7, 0,3 - численные значения вероятности обрыва и не обрыва МП, соответственно.
Событию получения двух сигналов тревог, при движении нарушителя в направлении ВА ( ) соответствует только одна комбинация (формула 1). Поэтому вероятность наступления рассматриваемого события равна [6]:
) соответствует только одна комбинация (формула 1). Поэтому вероятность наступления рассматриваемого события равна [6]:

где P1(N=2) - вероятность получения двух сигналов тревог при движении нарушителя в направлении ВА ( ).
).
Событию получения только одного сигнала тревоги при движении нарушителя в направлении ВА ( ) соответствуют две комбинации (формулы 2 и 3) (фиг. 2). Вероятность наступления этого события равна [6]:
) соответствуют две комбинации (формулы 2 и 3) (фиг. 2). Вероятность наступления этого события равна [6]:

где  - вероятность получения только одного сигнала тревоги при движении нарушителя в направлении ВА (
- вероятность получения только одного сигнала тревоги при движении нарушителя в направлении ВА ( ).
).
Вероятность правильного определения движения нарушителя в направлении ВА ( ) при обнаружении нарушителя равна отношению вероятности наступления благоприятного события (поступило два сигнала тревоги) к общей вероятности всех событий (формулы 5,6):
) при обнаружении нарушителя равна отношению вероятности наступления благоприятного события (поступило два сигнала тревоги) к общей вероятности всех событий (формулы 5,6):

где  - вероятность правильного определения движения обнаруженного нарушителя в направления ВА (
- вероятность правильного определения движения обнаруженного нарушителя в направления ВА ( ).
).
Таким образом, вероятность правильного определения движения обнаруженного нарушителя в направлении ВА ( ) в известном способе не более 54%.
) в известном способе не более 54%.
При движении нарушителя в направлении АВ ( ), от СО может поступить только один сигнал тревоги (так как нарушитель пересечет сначала рубеж, расположенный по длине МП первым к СО, а затем рубеж, расположенный по длине МП вторым к СО) [3]:
), от СО может поступить только один сигнал тревоги (так как нарушитель пересечет сначала рубеж, расположенный по длине МП первым к СО, а затем рубеж, расположенный по длине МП вторым к СО) [3]:
Событию получения только одного сигнала тревоги при движении нарушителя в направлении АВ ( ), соответствуют три комбинации (формулы 8-10). Вероятность его наступления равна [6]:
), соответствуют три комбинации (формулы 8-10). Вероятность его наступления равна [6]:

где  - вероятность получения только одного сигнала тревоги при движении нарушителя в направлении АВ (
- вероятность получения только одного сигнала тревоги при движении нарушителя в направлении АВ ( ).
).
Движение нарушителя в направлении АВ ( ) определяется по одному сигналу тревоги (формула 12). При движении нарушителя в направлении ВА (
) определяется по одному сигналу тревоги (формула 12). При движении нарушителя в направлении ВА ( ) также может поступить один сигнал тревоги (формула 6). Вероятность правильно определить направление движения АВ (
) также может поступить один сигнал тревоги (формула 6). Вероятность правильно определить направление движения АВ ( ) по одному сигналу тревоги при равновероятном направлении движения объекта (вероятность движения нарушителя в направлении АВ равна вероятности движения в направлении ВА) равна отношению вероятности наступления благоприятного события (один сигнал тревоги поступил при движении нарушителя в направлении АВ) к общей вероятности поступления одного сигнала тревоги в обоих направлениях с учетом значения априорной вероятности движения нарушителя в разных направлениях (формула 13):
) по одному сигналу тревоги при равновероятном направлении движения объекта (вероятность движения нарушителя в направлении АВ равна вероятности движения в направлении ВА) равна отношению вероятности наступления благоприятного события (один сигнал тревоги поступил при движении нарушителя в направлении АВ) к общей вероятности поступления одного сигнала тревоги в обоих направлениях с учетом значения априорной вероятности движения нарушителя в разных направлениях (формула 13):

где P2 - вероятность правильного определения движения обнаруженного нарушителя в направлении АВ ( );
);
0,5 - значение априорной вероятности движения нарушителя в направлении АВ или ВА.
Таким образом, вероятность правильного определения движения обнаруженного нарушителя в направлении АВ ( ) в известном способе не более 68%.
) в известном способе не более 68%.
В известном способе для прикрытия рубежа не рационально расходуется МП на единицу длины сигнализационного рубежа (фиг. 1). Так, длина прикрываемого рубежа в нем меньше половины длины развернутого МП (фиг. 1):

где  - длина прикрываемого сигнализационного рубежа, м;
- длина прикрываемого сигнализационного рубежа, м;
 - длина развернутого МП, м;
- длина развернутого МП, м;
 - расстояние между соседними рубежами МП, м.
- расстояние между соседними рубежами МП, м.
Как показывают выше приведенные расчеты, недостатками известного способа являются: низкая вероятность правильного определения направления движения нарушителя по дороге и высокий расход длины МП на единицу длины сигнализационного рубежа (формулы 7, 13, 14).
Целью изобретения является повышение вероятности правильного определения движения обнаруженного нарушителя по дороге и снижение расхода длины МП на единицу длины сигнализационного рубежа.
Для достижения поставленной цели разработан способ охранного мониторинга с применением обрывного рефлектометрического средства обнаружения, заключающийся в развертывании МП СО в три рубежа в форме буквы Z через каждую из дорог и в один рубеж на участках местности между этими дорогами; установлении расстояния между соседними рубежами не менее двух расстояний, которые нарушитель может пройти по местности с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим; обеспечении передачи сигналов тревог и значений длин МП, остающихся подключенными к СО после обрывов нарушителем МП, на систему сбора и обработки информации; накоплении сигналов от СО с момента получения первого сигнала в течение времени, определяемого расстоянием между внешними рубежами и минимально возможной скоростью движения нарушителя; применении алгоритма, определяющего место нарушения по длине подключенного МП, передаваемого СО совместно с сигналом тревоги, и направления движения по дороге: в одну сторону по одному сигналу тревоги, в другую по двум и более сигналам тревоги с уменьшающимися показаниями СО о длине, подключенного к нему МП (фиг. 3).
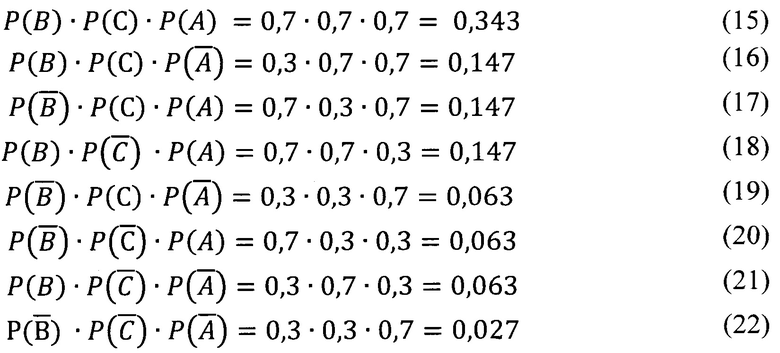
В предлагаемой схеме МП пересекает дорогу по трем рубежам (точкам). Согласно правилам комбинаторики, существует восемь различных комбинаций обрывов МП в разных точках [6]:
где  - вероятность обрыва и не обрыва МП в точке С, соответственно.
- вероятность обрыва и не обрыва МП в точке С, соответственно.
Событию получения двух и более сигналов тревог за установленное время их накопления при движении нарушителя в направлении ВА ( ) соответствуют 4 комбинации (формулы 15 - 18). Вероятность его наступления равна [6]:
) соответствуют 4 комбинации (формулы 15 - 18). Вероятность его наступления равна [6]:

где  - вероятность получения двух и более сигналов тревог при движении нарушителя в направлении ВА (
- вероятность получения двух и более сигналов тревог при движении нарушителя в направлении ВА ( ).
).
Событию получения только одного сигнала тревоги при движении нарушителя в направлении ВА ( ) соответствует три комбинации (формулы 19-21). Вероятность наступления этого события равна [6]:
) соответствует три комбинации (формулы 19-21). Вероятность наступления этого события равна [6]:

где  - вероятность получения только одного сигнала тревоги при движении нарушителя в направлении ВА (
- вероятность получения только одного сигнала тревоги при движении нарушителя в направлении ВА ( ).
).
Вероятность правильного определения движения нарушителя в направлении ВА ( ) в предлагаемом способе равна отношению вероятности наступления благоприятного события (поступило два сигнала тревоги) к общей вероятности всех событий, без учета события не поступления ни одного сигнала тревоги [6]:
) в предлагаемом способе равна отношению вероятности наступления благоприятного события (поступило два сигнала тревоги) к общей вероятности всех событий, без учета события не поступления ни одного сигнала тревоги [6]:

где  - вероятность правильного определения движения обнаруженного нарушителя в направлении ВА (
- вероятность правильного определения движения обнаруженного нарушителя в направлении ВА ( ) в предлагаемом способе.
) в предлагаемом способе.
При движении нарушителя по дороге в направлении АВ ( ) в предлагаемом способе от СО может поступить только один сигнал тревоги (так как нарушитель пересечет сначала рубеж, расположенный по длине МП первым к СО, а затем рубеж, расположенный по длине МП вторым к СО).
) в предлагаемом способе от СО может поступить только один сигнал тревоги (так как нарушитель пересечет сначала рубеж, расположенный по длине МП первым к СО, а затем рубеж, расположенный по длине МП вторым к СО).
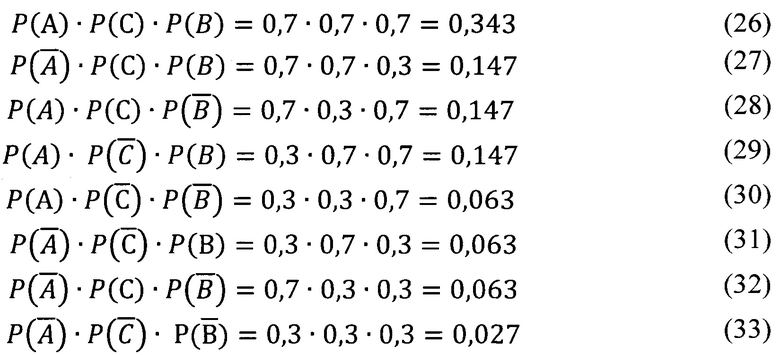
Событию получения только одного сигнала тревоги при движении нарушителя в направлении АВ ( ), соответствуют формулы 26-32. Вероятность наступления этого события равна [6]:
), соответствуют формулы 26-32. Вероятность наступления этого события равна [6]:

где  - вероятность получения только одного сигнала тревоги в направлении АВ (
- вероятность получения только одного сигнала тревоги в направлении АВ ( ).
).
В предлагаемом способе, как и в известном, движение обнаруженного нарушителя в направлении АВ ( ) определяется по одному сигналу тревоги. При движении нарушителя в направлении ВА (
) определяется по одному сигналу тревоги. При движении нарушителя в направлении ВА ( ) также может поступить один сигнал тревоги (формула 24). Вероятность правильно определить направление движения АВ (
) также может поступить один сигнал тревоги (формула 24). Вероятность правильно определить направление движения АВ ( ) по одному сигналу тревоги при равновероятном направлении движения нарушителя равна отношению вероятности наступления благоприятного события (один сигнал тревоги поступил при движении нарушителя в направлении АВ) к общей вероятности поступления одного сигнала тревоги в обоих направлениях с учетом значения априорной вероятности движения нарушителя в разных направлениях:
) по одному сигналу тревоги при равновероятном направлении движения нарушителя равна отношению вероятности наступления благоприятного события (один сигнал тревоги поступил при движении нарушителя в направлении АВ) к общей вероятности поступления одного сигнала тревоги в обоих направлениях с учетом значения априорной вероятности движения нарушителя в разных направлениях:

где  - вероятность правильного определения движения обнаруженного нарушителя в направлении АВ (
- вероятность правильного определения движения обнаруженного нарушителя в направлении АВ ( ) в предлагаемом способе;
) в предлагаемом способе;
0,5 - значение априорной вероятности движения нарушителя в направлении АВ или ВА.
Вероятность правильного определения движения обнаруженного нарушителя в направлении АВ ( ) в предлагаемом способе выше в 1,22 раза по сравнению с известным (формулы 13, 35):
) в предлагаемом способе выше в 1,22 раза по сравнению с известным (формулы 13, 35):

Вероятность правильного определения движения обнаруженного нарушителя в направления ВА ( ) увеличена в 1,5 раза по сравнению с известным способом (формулы 7, 25):
) увеличена в 1,5 раза по сравнению с известным способом (формулы 7, 25):

Длина прикрываемого рубежа локального участка местности в предлагаемом способе равна (фиг. 3):

где  - количество дорог на сигнализационном рубеже, шт.;
- количество дорог на сигнализационном рубеже, шт.;
1,2 - коэффициент, учитывающий пересечение МП дороги под углом;
Н - расстояние между соседними рубежами МП, м.
Значение расстояния между соседними рубежами МП также как и в известном способе, должно быть не менее удвоенного расстояния, проходимого по дороге нарушителем с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим [3]:

где  - время перехода СО из режима тревоги в дежурный режим, с;
- время перехода СО из режима тревоги в дежурный режим, с;
 - максимальная скорость движения нарушителя по дороге, м/с.
- максимальная скорость движения нарушителя по дороге, м/с.
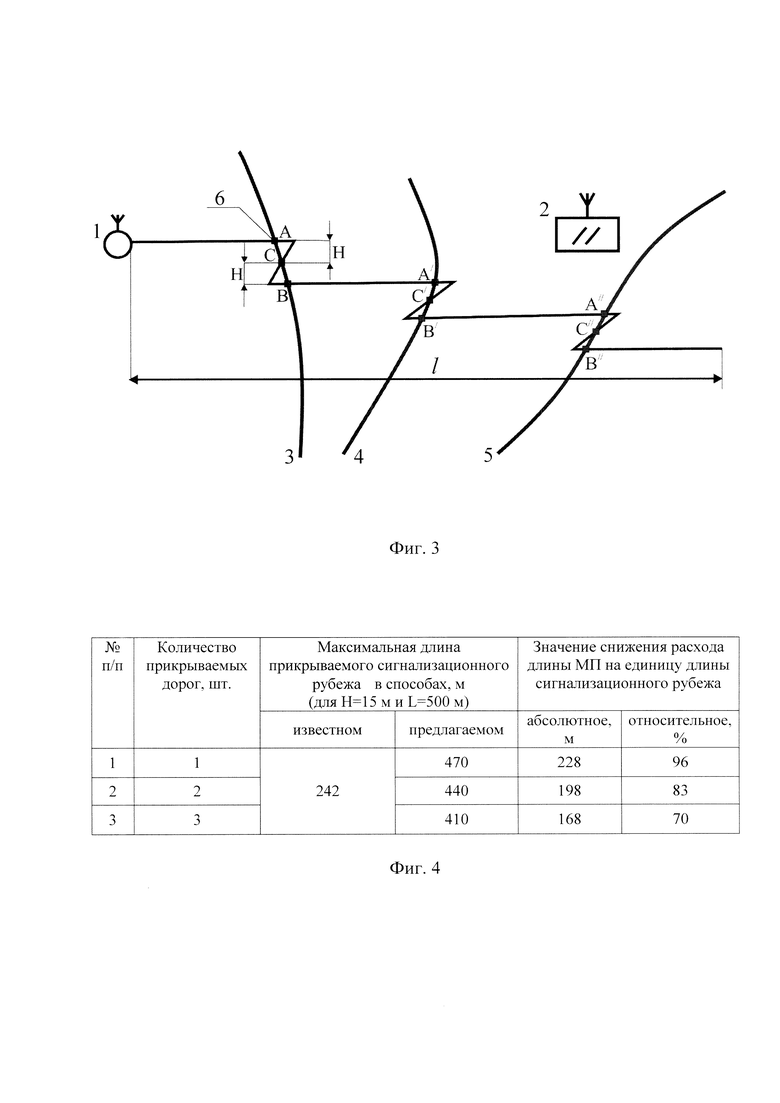
Сравнение формул 14 и 38 указывает на снижение расхода длины МП на единицу длины сигнализационного рубежа в предлагаемом способе по сравнению с известным. Так, например, при расстоянии между соседними рубежами (Н) 15 метров и длине развернутого МП 500 метров его расход на единицу длины сигнализационного рубежа снижается от 70% (для участка с тремя дорогами) до 96% (для участка с одной дорогой) (фиг. 4)
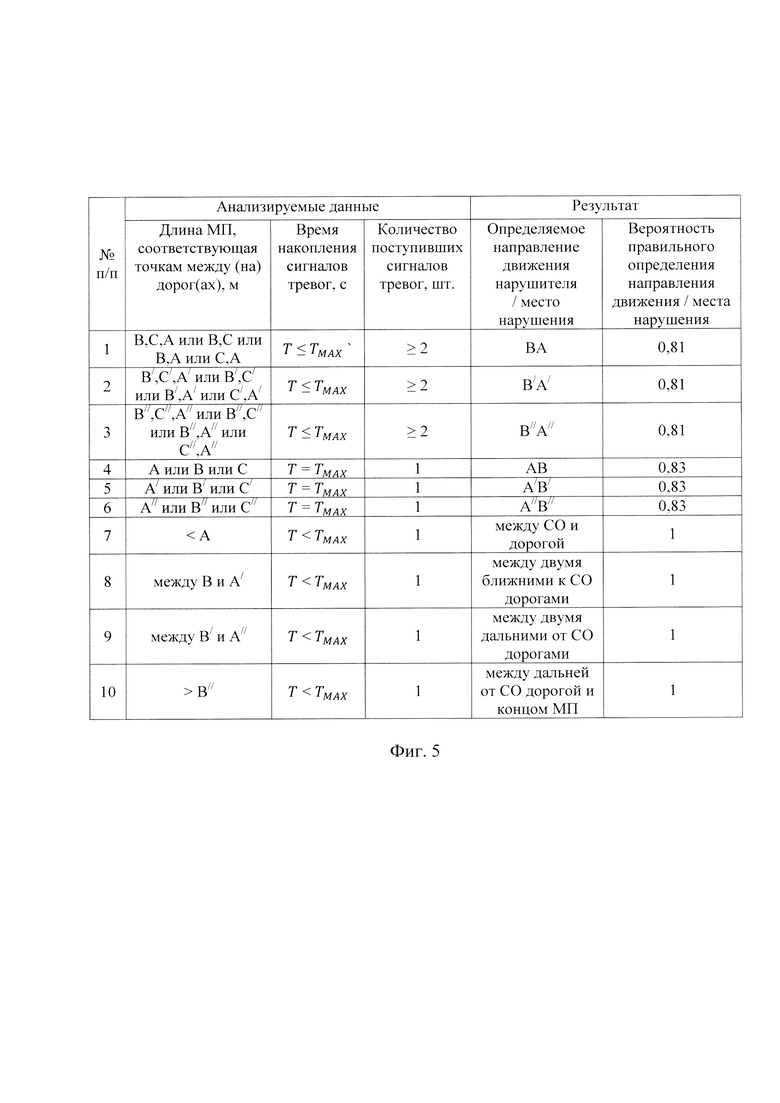
При движении нарушителя вне дорог место нахождения определяется по одному сигналу тревоги и значению указанной длины МП с учетом схемы развертывания МП на местности (фиг. 5). Максимальное время накопления сигналов ( ) в предлагаемом способе определяется, так же как и в известном [3].
) в предлагаемом способе определяется, так же как и в известном [3].
Способ включает два этапа: подготовительный и основной. Подготовительный этап включает:
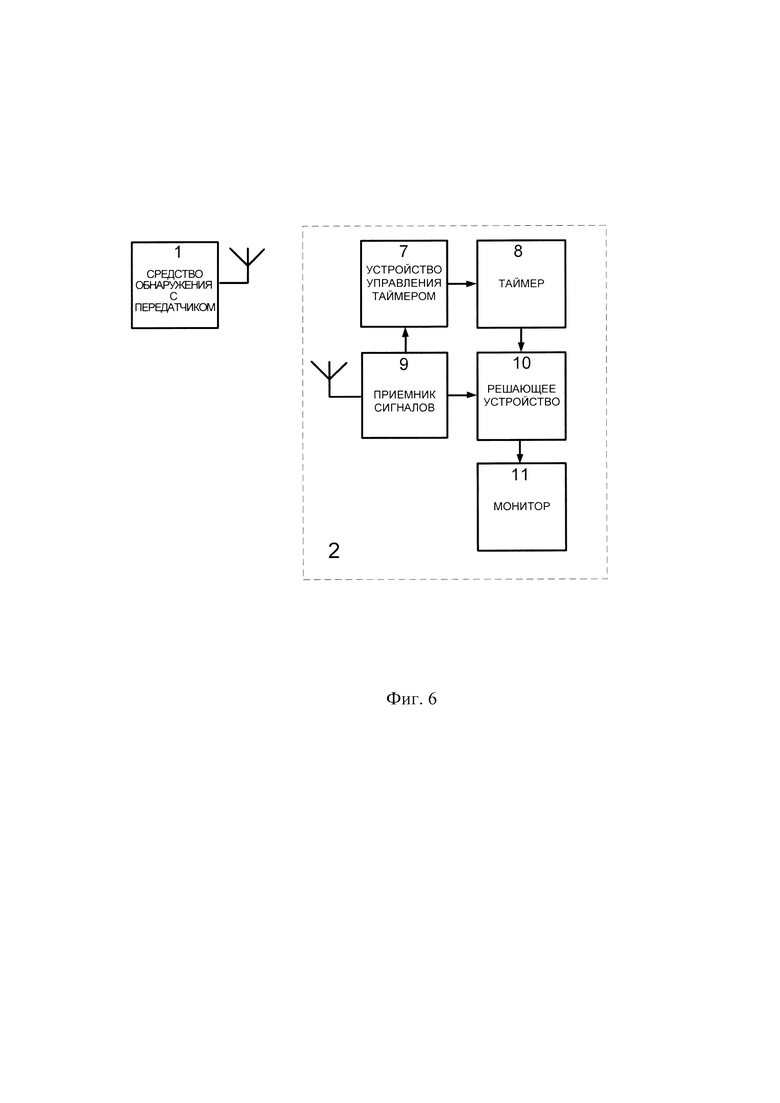
1. Развертывание МП по установленной схеме и подключение его к средству 1 обнаружения с передатчиком (фиг. 3, 6).
2. Развертывание на местности системы 2 сбора и обработки информации, включающей в себя приемник 9 сигналов, устройство 7 управления таймером, таймер 8, устройство 10 решающее и монитор 11 (фиг. 6).
3. Расчет максимального значения времени накопления сигналов тревог ( ) и загрузку его в устройство 10 решающее.
) и загрузку его в устройство 10 решающее.
4. Запись в устройство 10 решающее алгоритма определения направления движения нарушителя (фиг. 5).
5. Начало работы средства 1 обнаружения с передатчиком в дежурном режиме (фиг. 3).
Основной этап начинается при обрыве нарушителем МП, он включает:
1. Переход средства 1 обнаружения с передатчиком в режим тревоги и передачу им сигнала тревоги и длины, оставшейся части подключенного к нему МП на систему 2 сбора и обработки информации (фиг. 6).
2. Регистрацию приемником 9 сигнала тревоги от средства 1 обнаружения с передатчиком, запуск таймера 8 устройством 7 управления таймером, начало отсчета им времени накопления сигналов тревог (Т) (фиг. 6).
3. Запись длины оставшейся части МП, подключенного к средству обнаружения 1 с передатчиком в устройство 10 решающее (фиг. 6).
4. Если за максимальное время накопления сигналов тревог ( ), записанное в устройство 10 решающее, на систему 2 сбора и обработки информации поступил один сигнал тревоги от средства 1 обнаружения со значением длины МП соответствующей точкам А (
), записанное в устройство 10 решающее, на систему 2 сбора и обработки информации поступил один сигнал тревоги от средства 1 обнаружения со значением длины МП соответствующей точкам А ( ) или В (
) или В ( ) или С (
) или С ( ) - определение алгоритмом направления движения нарушителя в направлении АВ (
) - определение алгоритмом направления движения нарушителя в направлении АВ ( ) (Фиг. 5).
) (Фиг. 5).
5. Если за максимальное время накопления сигналов тревог ( ), записанное в устройство 10 решающее, на систему 2 сбора и обработки информации поступило два и более сигналов тревоги от средства 1 обнаружения со значением длин МП соответствующей точкам ВСА (
), записанное в устройство 10 решающее, на систему 2 сбора и обработки информации поступило два и более сигналов тревоги от средства 1 обнаружения со значением длин МП соответствующей точкам ВСА ( ) или ВС (
) или ВС (
 ) или ВА (
) или ВА ( ) или СА (
) или СА ( ) - определение алгоритмом направления движения нарушителя в направлении ВА (
) - определение алгоритмом направления движения нарушителя в направлении ВА ( ) (фиг. 5).
) (фиг. 5).
6. Если на систему 2 сбора и обработки информации поступил один сигнал тревоги от средства 1 обнаружения со значением длины МП не пересекающим ни одну из дорог - определение алгоритмом движения нарушителя вне дороги с указанием места (фиг. 5).
7. Выведение результата на монитор 11 (фиг. 6).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 схема развертывания МП в известном способе;
- фиг. 2 сравнительная таблица вероятностей правильного определения направления движения обнаруженного нарушителя в известном и предлагаемом способе;
- фиг. 3 схема развертывания МП в предлагаемом способе;
- фиг. 4 таблица снижения расхода длины МП на единицу длины сигнализационного рубежа в предлагаемом способе в сравнении с известным в зависимости от количества дорог на рубеже;
- фиг. 5 алгоритм определения направления движения нарушителя (таблица принятия решения);
- фиг. 6 структурная схема взаимосвязи применяемых устройств при реализации способа.
Техническим результатом изобретения является повышение вероятности правильного определения движения обнаруженного нарушителя по дороге и снижение расхода длины МП на единицу длины сигнализационного рубежа.
Источники информации
1. Пат. 1826788 Российская Федерация G08B 13/12. Сигнальное устройство / Круглов Ю.Н., - №4887358/24; заявл. 26.10.1990; опубл. 10.08.1996, Бюл. №22. - 4 с.
2. Коршняков, В. Г. Сигнализационные средства охраны локальных участков: уч. пособие / В. Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Пат. 2647668 Российская Федерация МПК G08C 15/00. Способ охранного мониторинга места пересечения трех дорог / С.А. Удот, М.А. Лебедев. -2017107141; заявл. 03.03.2017; опубл. 16.03.2018, Бюл. №8. - 9 с.
4. Средство обнаружения обрывное «КСМ-ОС». Паспорт БАЖК. 425112.002 ПС. - 21 с
5. Вохминцев, А.А. Учет вероятности «раскрытия» средств обнаружения нарушителем при оценке эффективности быстроразвертываемых средств охраны / А.А. Вохминцев, П.А. Лапшин, И.Н. Пешков, A.M. Пурис, В.В. Рябов // Современные охранные технологии и средства обеспечения комплексной безопасности объектов: материалы одиннадцатой Всероссийской научно - технической конференции. - Пенза: Изд. «Март», 2016. - С. 104-106.
6. Вентцель Е.С.Теория вероятностей: Учеб. для вузов / Е.С. Вентцель. М.: Высш. шк., 1999-576 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА МЕСТНОСТИ С ДОРОГОЙ | 2017 |
|
RU2651500C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА МЕСТНОСТИ ОБРЫВНЫМ РЕФЛЕКТОМЕТРИЧЕСКИМ СРЕДСТВОМ ОБНАРУЖЕНИЯ | 2018 |
|
RU2679180C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2017 |
|
RU2647668C1 |
| СПОСОБ ПРИМЕНЕНИЯ ОБРЫВНОГО РЕФЛЕКТОМЕТРИЧЕСКОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2019 |
|
RU2716897C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА МЕСТНОСТИ | 2017 |
|
RU2672006C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2621179C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2617575C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
Изобретение относится к способам охранного мониторинга с применением обрывного рефлектометрического средства обнаружения (СО) на участке местности с дорогами и может быть использовано в случаях применения СО с микропроводным чувствительным элементом, определяющим расстояние до места обрыва микропровода (МП) на основе рефлектометрического метода. Технический результат заключается в повышении вероятности правильного определения движения обнаруженного нарушителя по дороге и снижении расхода длины МП на единицу длины сигнализационного рубежа. В способе при развертывании МП СО в трех рубежах в форме буквы Z через каждую из дорог и в один рубеж на участках местности между этими дорогами, при накоплении сигналов от СО с момента поступления первого сигнала в течение времени, определяемого расстоянием между соседними рубежами и минимально возможной скоростью движения нарушителя, применяют алгоритм определения места нарушения по длине подключенного МП, передаваемой СО совместно с сигналом тревоги, и направления движения по дороге. 6 ил.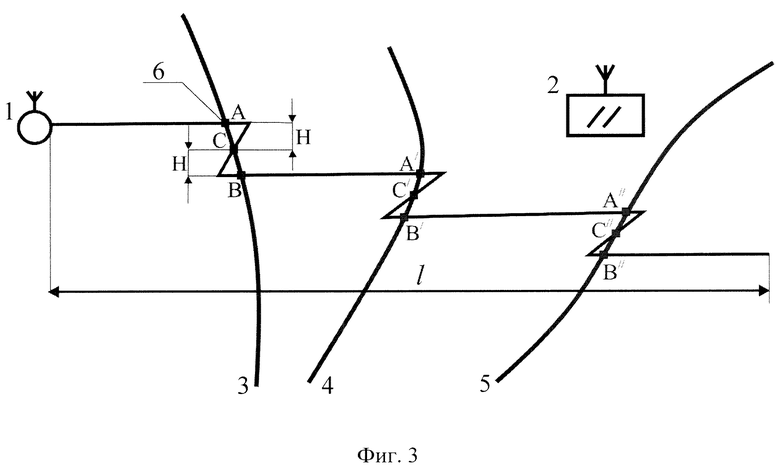
Способ охранного мониторинга с применением обрывного рефлектометрического средства обнаружения, заключающийся в развертывании на участке местности микропровода, подключаемого к обрывному рефлектометрическому средству обнаружения, в несколько рубежей; установлении расстояния между соседними рубежами не менее двух расстояний, которые нарушитель может пройти по местности с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; определении средством обнаружения длины оставшейся части микропровода, подключенного к нему после его обрыва нарушителем; обеспечении передачи сигналов тревог и значений длин микропровода, остающихся подключенными к средству обнаружения после обрывов нарушителем микропровода, на систему сбора и обработки информации; накоплении сигналов от средства обнаружения с момента поступления первого сигнала в течение времени, определяемого расстоянием между соседними рубежами и минимально возможной скоростью движения нарушителя; автоматическом переходе средства обнаружения в дежурный режим после передачи сигнала тревоги, отличающийся тем, что микропровод разворачивается в три рубежа в форме буквы Z через каждую из дорог и в один рубеж на участках местности между этими дорогами; применяется алгоритм, определяющий место нарушения по длине подключенного микропровода, передаваемой средством обнаружения совместно с сигналом тревоги, и направления движения по дороге: в одну сторону по одному сигналу тревоги, в другую по двум и более сигналам тревоги с уменьшающимися показаниями от средства обнаружения о длине подключенного к нему микропровода.
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ТРЕХСТОРОННЕЙ РАЗВИЛКИ ДОРОГ | 2016 |
|
RU2620963C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2634745C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

