Изобретение относится к способам сигнализационного прикрытия локального участка местности с дорогой и может быть использовано в случаях применения средства обнаружения с микропроводным чувствительным элементом (СО), определяющим расстояние до места обрыва микропровода на основе рефлектометрического метода.
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности [1]. Поэтому сигнализационному прикрытию дорог уделяется значительное внимание. Если дорожная сеть проходит через пересеченную местность, покрытую растительностью, то для решения задачи сигнализационного прикрытия применяются средства обнаружения, не требующие специальной подготовки местности, например средства обнаружения с микропроводным чувствительным элементом, определяющие расстояние до места обрыва микропровода на основе рефлекто-метрический метода [2-4]. При обрыве микропровода такое СО передает сигнал тревоги на систему сбора и обработки информации (ССОИ), силы реагирования по прибытию на участок снимают показания длины оставшегося подключенным к СО микропровода с его индикатора для уточнения места нарушения. [2, 3]
Известен способ охранного мониторинга участка местности с дорогой с применением одного СО, заключающийся в развертывании в один рубеж через дорогу и участок местности, прилегающий к ней, микропроводного чувствительного элемента и подключении его к СО, обеспечении передачи сигнала тревоги от СО на систему сбора и обработки информации при обрыве нарушителем микропровода. [2, 3]
Недостатком известного способа с применением одного СО является то, что он не позволяет определить направление движения обнаруженного нарушителя.
Известен способ охранного мониторинга участка местности с дорогой с применением двух СО, заключающийся в развертывании через дорогу и участок местности, прилегающий к ней, двух микропроводных чувствительных элементов и подключении их к СО, обеспечении передачи сигналов тревоги от СО на систему сбора и обработки информации при обрыве нарушителем микропроводов; применении алгоритма определения направления движения нарушителя по очередности срабатывания СО. [2, 3]
Этот известный способ позволяет определять направление движения обнаруженного нарушителя, но он требует применения двух СО.
Целью изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением одного СО.
Для достижения поставленной цели разработан способ охранного мониторинга участка местности с дорогой, заключающийся в развертывании через дорогу и участок местности, прилегающий к ней, микропроводного чувствительного элемента в два рубежа; установке расстояния между рубежами не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; подключении микропровода к СО; обеспечении передачи сигнала тревоги от СО на систему сбора и обработки информации при обрыве нарушителем микропровода; переходе СО после передачи сигнала тревоги в дежурный режим автоматически; применении алгоритма определения направления движения нарушителя на основе сравнения количества поступивших на систему сбора и обработки сигналов тревог (один или два сигнала) за установленный интервал времени с априори известными очередностью пересечения рубежей нарушителем при движении по дороге в каждом из возможных направлений и очередностью следования этих рубежей по длине микропрода от средства обнаружения.
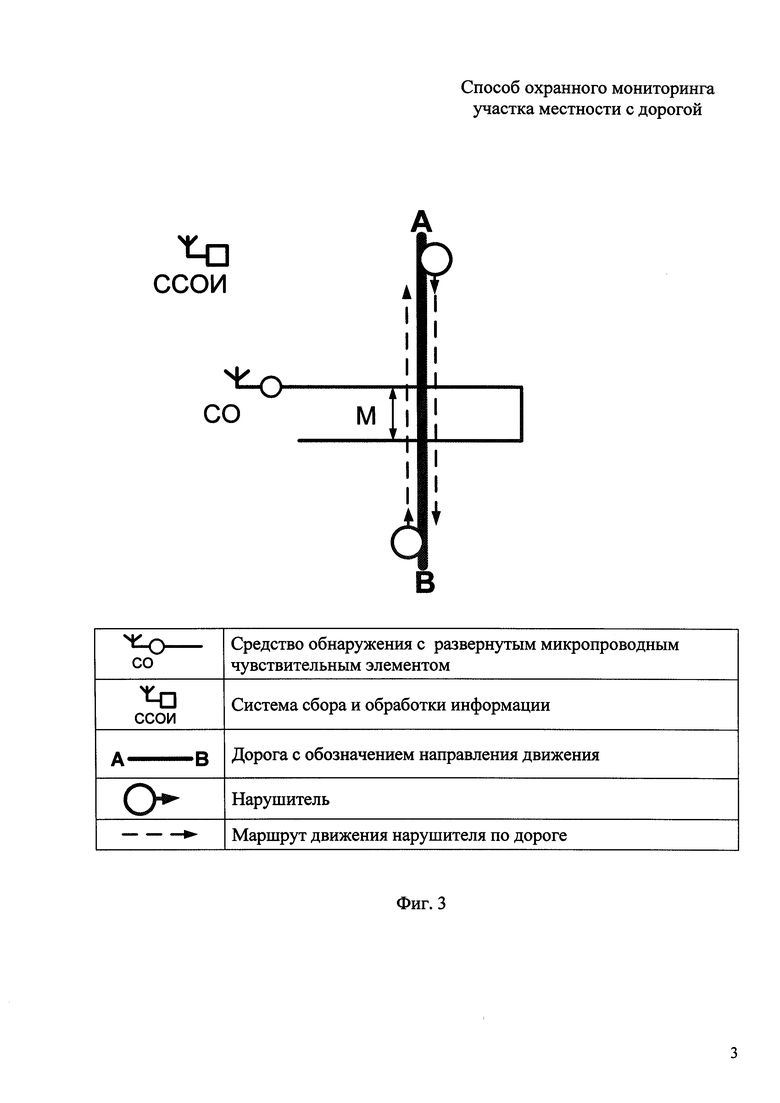
В предлагаемом способе используется возможность рассматриваемых СО сохранять работоспособность после обрыва микропровода с оставшейся его частью [3, 4]. Согласно схеме развертывания один рубеж по длине микропровода расположен первым к СО, другой за ним, поэтому в зависимости от очередности пересечения нарушителем рубежей при движении через участок местности с дорогой средство выдаст на ССОИ один или два сигнала тревоги (фиг. 3).
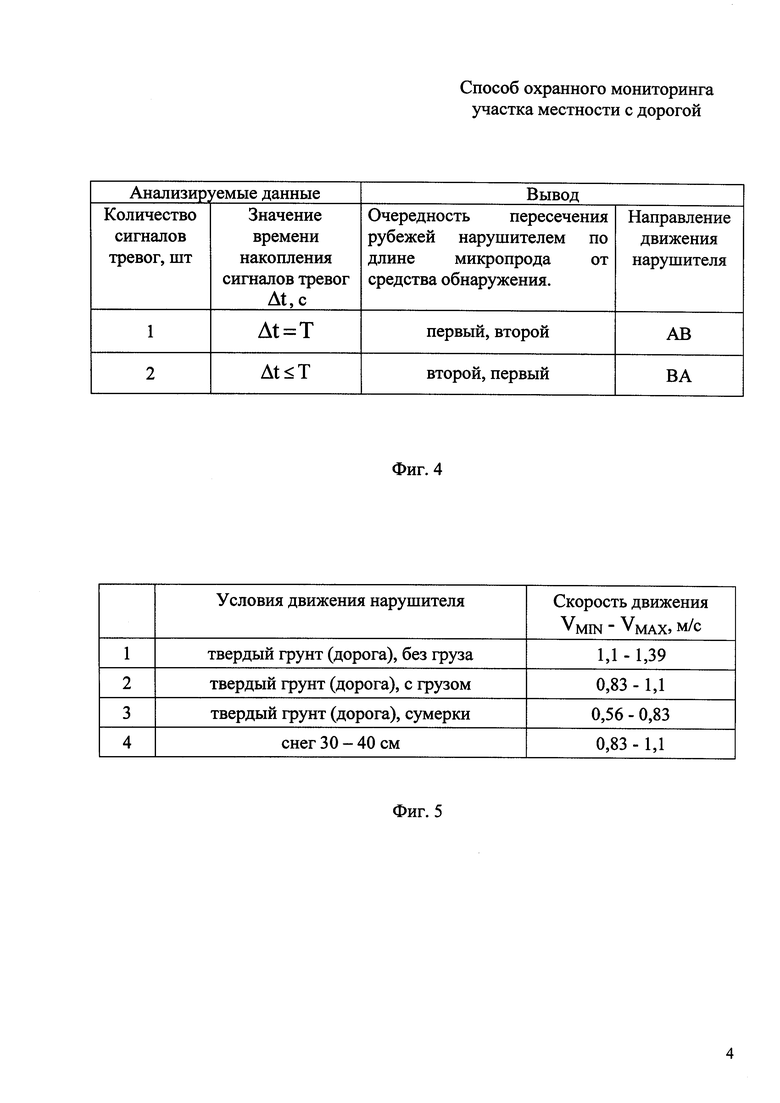
Так, если нарушитель пересечет сначала рубеж, расположенный по длине микропровода первым к СО, а затем рубеж, расположенный по длине микропровода вторым к СО, то на ССОИ поступит один сигнал тревоги (направление АВ), (фиг. 3, 4).
И наоборот, если нарушитель пересечет сначала рубеж, расположенный по длине микропровода вторым к СО, а затем рубеж, расположенный по длине микропровода первым к СО, то на ССОИ поступят два сигнала тревоги (направление ВА), (фиг. 3, 4).
Для обеспечения своевременного автоматического перехода СО в дежурный режим из режима тревоги после первого обрыва микропровода расстояние между рубежами устанавливается не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим.

где М - расстояние между рубежами, м;
k - время перехода средства обнаружения из режима тревоги в дежурный режим, с;
VMAX - максимальная скорость движения нарушителя по дороге, м/с.
Максимально возможная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5). [5, 6]
Для исключения ошибок распознавания, устанавливается максимальное значение времени накопления сигналов тревог (Т), которое определяется расстоянием между рубежами, минимальной скоростью движения человека и берется с запасом 1,2. Расчет производится по формуле

где Т - максимальное значение времени накопления сигналов тревог, с;
VMIN - минимальная скорость движения нарушителя по дороге, м/с;
М - расстояние между рубежами, м.
Минимальная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5). [5, 6]
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание микропровода и подключение его к средству 1 обнаружения с передатчиком (фиг. 3, 6).
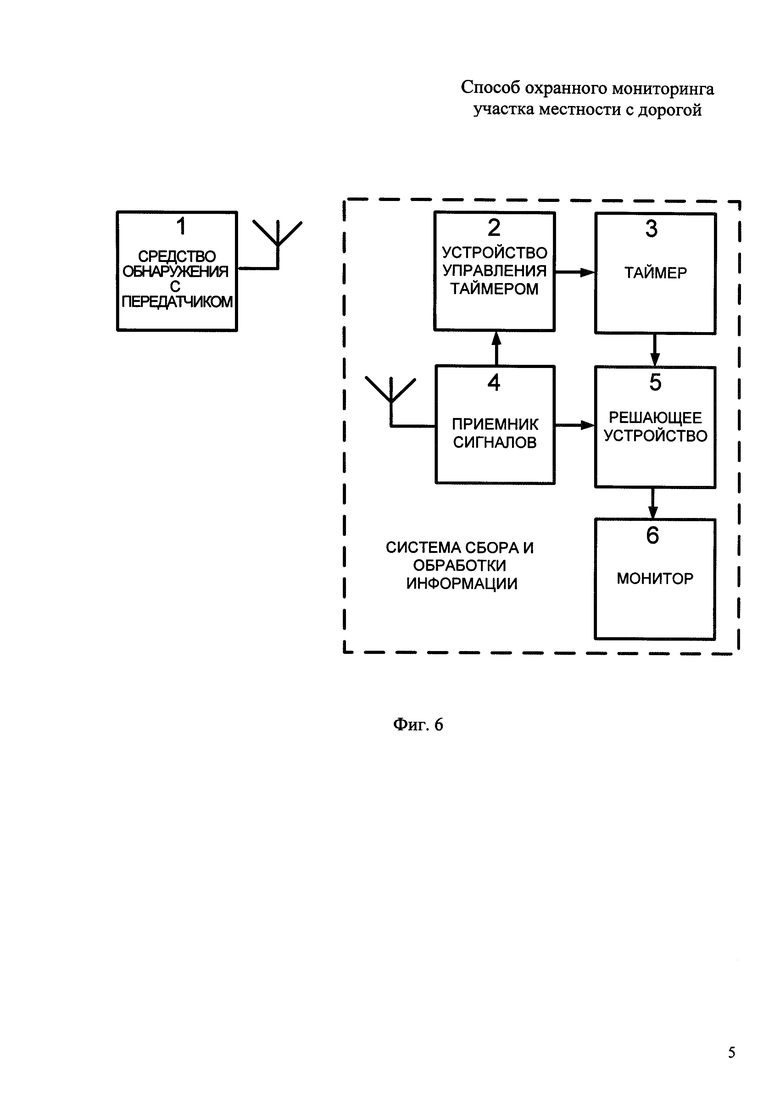
2. Развертывание на местности системы сбора и обработки информации, включающей в себя приемник 4 сигналов, устройство 2 управления таймером, таймер 3, решающее устройство 5 и монитор 6 (фиг. 6).
3. Расчет максимального значения времени накопления сигналов тревог и загрузку его в решающее устройство 5 (формула 2).
4. Начало работы средства 1 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при обрыве нарушителем микропровода на ближнем к нему рубеже, он включает:
1. Переход средства 1 обнаружения с передатчиком в режим тревоги и передачу им сигнала тревоги на ССОИ (фиг. 6).
2. Регистрацию приемником 4 сигнала тревоги от средства 1 обнаружения с передатчиком, запуском таймера 3 устройством 2 управления таймером, начало отсчета им времени накопления сигналов тревог (фиг. 6).
3. Запись сигнала тревоги в устройство 5 решающее (фиг. 6).
4. Автоматический переход средства 1 обнаружения с передатчиком в дежурный режим (фиг. 6).
5. Обрыв нарушителем микропровода на следующем рубеже (фиг. 6).
6. В случае, если этот рубеж по длине микропровода расположен первым к СО, - повторный переход средства 1 обнаружения с передатчиком в режим тревоги и передачу им сигнала тревоги на ССОИ.
7. Регистрацию приемником 4 второго сигнала тревоги от средства 1 обнаружения с передатчиком, остановкой таймера 3 устройством 2 управления таймером (фиг. 6).
8. Запись второго сигнала тревоги в устройство 5 решающее (фиг. 6).
9. Формирование вывода о движения нарушителя в направлении ВА устройством 5 решающим (фиг. 4).
10. В случае, если этот рубеж по длине микропровода расположен вторым к СО, - продолжение работы средства 1 обнаружения с передатчиком в дежурном режиме.
7. Передачей таймером 3 сигнала на устройство 5 решающее о достижении отсчитываемого времени накопления сигналов тревог максимального значения (фиг. 6).
8. Формирование вывода о движения нарушителя в направлении АВ устройством 5 решающим (фиг. 4).
4. Обнуление таймера 3 устройством 2 управления таймером. Выведение результата о месте нарушения на монитор 6 (фиг. 6).
Сущность изобретения поясняется графическими материалами, где представлены:
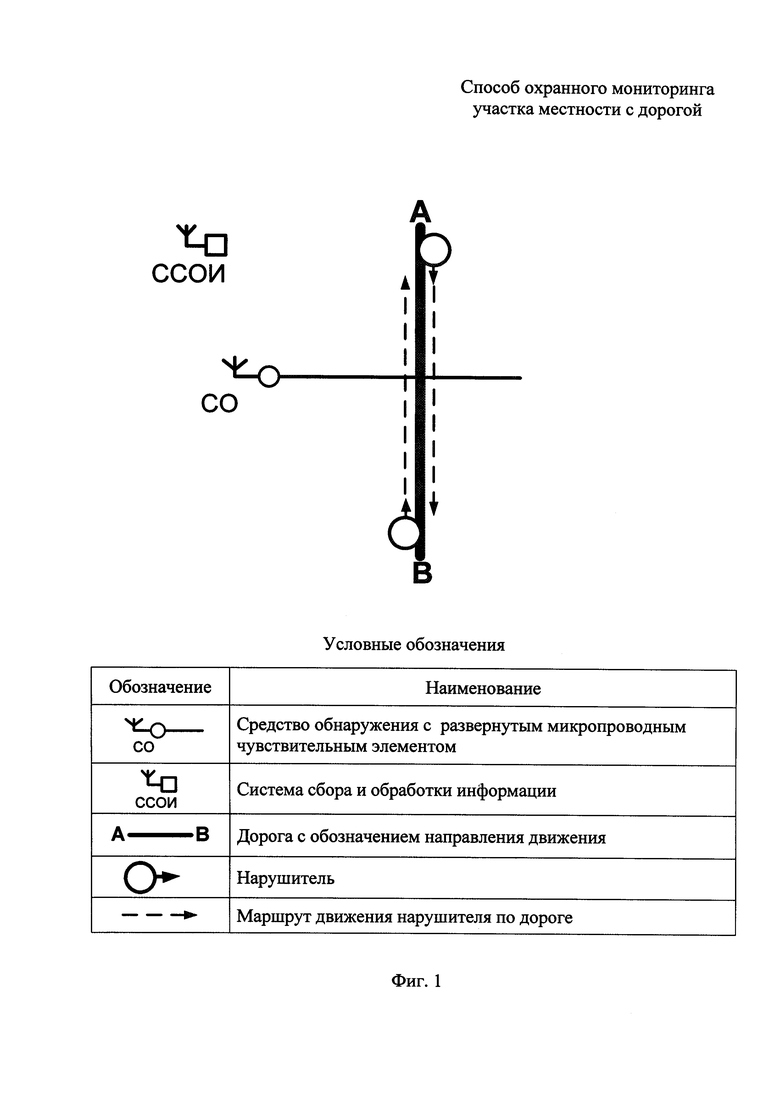
- фиг. 1 - схема развертывания микропроводного чувствительного элемента и одного средства обнаружения в известном способе охранного мониторинга участка местности с дорогой и примерами направлений движения нарушителя;
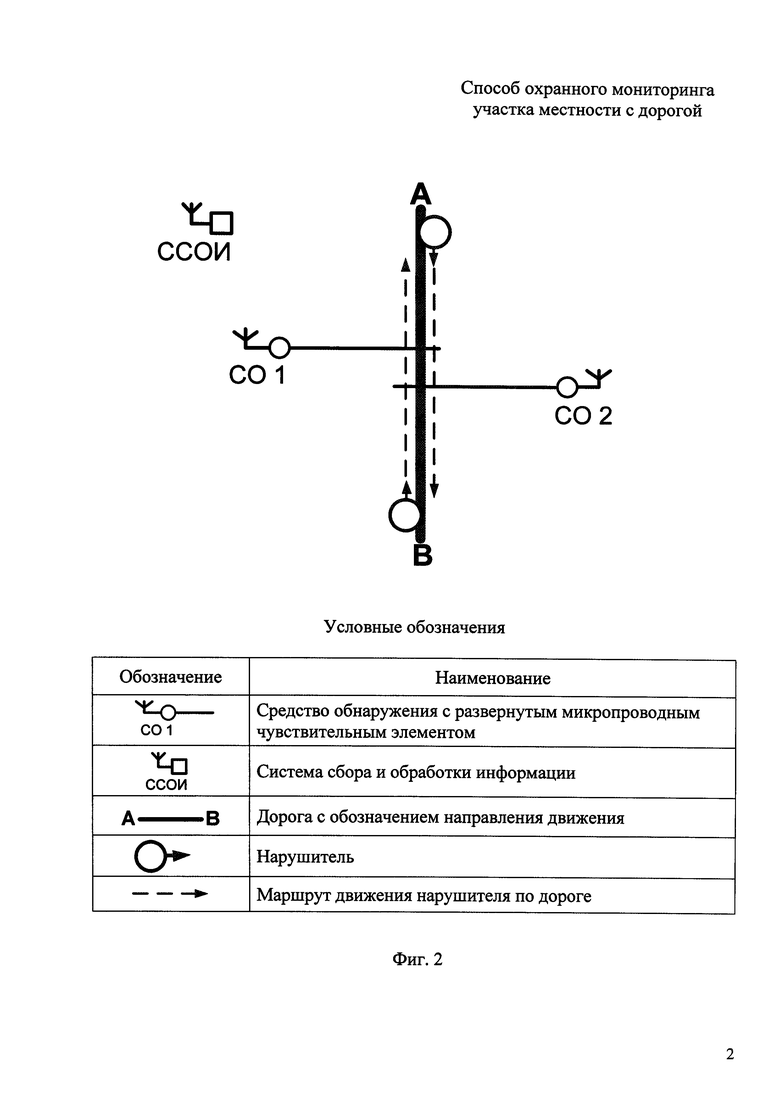
- фиг. 2 - схема развертывания двух микропроводных чувствительных элементов и двух средств обнаружения в известном способе охранного мониторинга участка местности с дорогой и примерами направлений движения нарушителя;
- фиг. 3 - схема развертывания микропроводного чувствительного элемента и средства обнаружения в предлагаемом способе охранного мониторинга участка местности с дорогой;
- фиг. 4 - алгоритм вывода о направлении движения нарушителя (таблица принятия решения);
- фиг. 5 - таблица интервалов скоростей нарушителя в зависимости от условий местности;
- фиг. 6 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя с применением одного СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. – М.: Просвещение, 1996. - 196 с.
2. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов, Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Средство обнаружения обрывное «КСМ-ОС». Паспорт БАЖК. 425112.002 ПС. - 21 с.
5. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко, С.В. Школа выживания. - М., 1994. - 140 с.
Изобретение относится к способам сигнализационного прикрытия локального участка местности с дорогой и может быть использовано в случаях применения средства обнаружения с микропроводным чувствительным элементом (СО), определяющим расстояние до места обрыва микропровода на основе рефлектометрического метода. Способ заключается в развертывании через дорогу и участок местности, прилегающий к ней, микропроводного чувствительного элемента в два рубежа; установке расстояния между рубежами не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; подключении микропровода к СО; обеспечении передачи сигнала тревоги от СО на систему сбора и обработки информации при обрыве нарушителем микропровода; переходе СО после передачи сигнала тревоги в дежурный режим автоматически; применении алгоритма определения направления движения нарушителя на основе сравнения количества поступивших на систему сбора и обработки сигналов тревог (один или два сигнала) за установленный интервал времени с априори известными очередностью пересечения рубежей нарушителем при движении по дороге в каждом из возможных направлений и очередностью следования этих рубежей по длине микропровода от СО. Изобретение обеспечивает получение возможности определения направления движения обнаруженного нарушителя с применением одного СО. 6 ил.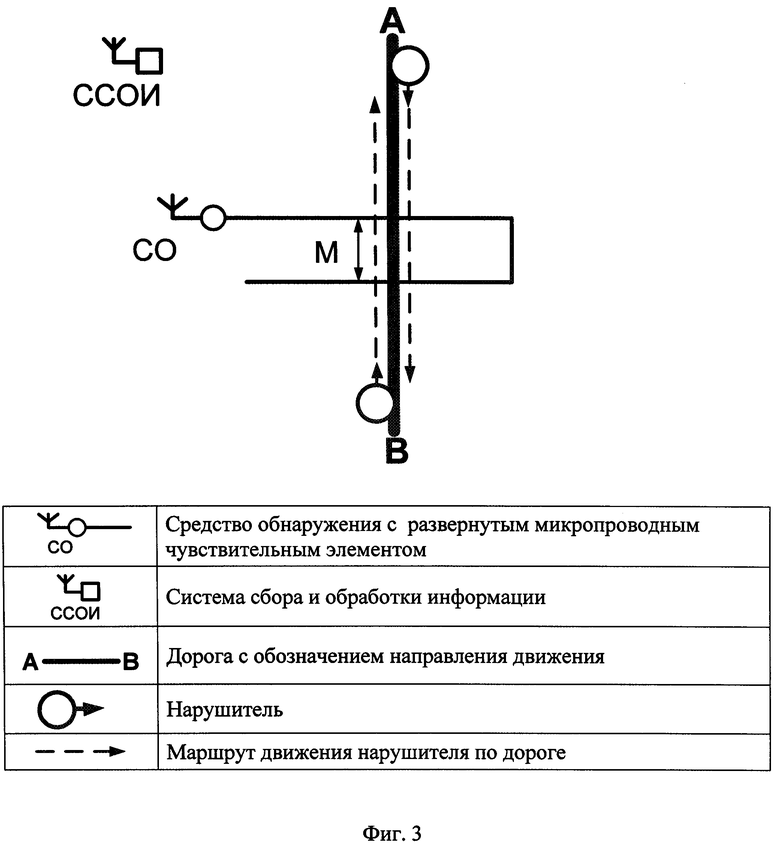
Способ охранного мониторинга участка местности с дорогой, заключающийся в развертывании через дорогу и участок местности, прилегающий к ней, микропроводного чувствительного элемента и подключении его к средству обнаружения, в котором применяется рефлектометрический метод измерения длины микропровода, обеспечении передачи сигнала тревоги от средства обнаружения на систему сбора и обработки информации при обрыве нарушителем микропровода, отличающийся тем, что микропровод разворачивается в два рубежа; расстояние между рубежами устанавливается не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; средство обнаружения после передачи сигнала тревоги переходит в дежурный режим автоматически; применяется алгоритм определения направления движения нарушителя на основе сравнения количества поступивших на систему сбора и обработки сигналов тревог (один или два сигнала) за установленный интервал времени с априори известными очередностью пересечения рубежей нарушителем при движении по дороге в каждом из возможных направлений и очередностью следования этих рубежей по длине микропрода от средства обнаружения.
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| CN 204168408 U, 18.02.2015. | |||

