Область техники
Настоящее изобретение относится к новой конфигурации торсионной пружины, которая может использоваться, в частности, в виде связующего звена, выполненного с возможностью передачи торсионного действия с упругим ответным действием.
Уровень техники
В области робототехники и, в частности, в области носимой робототехники использование упругих приводов является нередким (см. [2], [3], [4], [5]), где упругий элемент располагается между приводом и приводимым механическим элементом [1]. Например, как описано в патенте США № 5910720, имеется несколько причин использования этого типа приведения в действие, особенно в робототехнике. Это, безусловно, предполагает ряд преимуществ, которые могут быть обобщены в следующих пунктах:
- низкое выходное комплексное сопротивление во всем спектре частот;
- возможность управления выходным комплексным сопротивлением через программное обеспечение;
- снижение энергопотребления;
- высокое соотношение сила/масса;
- высокое соотношение мощность/масса;
- внутренняя гибкость в случае воздействия.
Эти типы приводов могут быть линейными или вращательными. Оба типа приводов могут быть реализованы с упругими линейными или торсионными элементами (как правило, пружинами или собранными устройствами, содержащими пружины).
Одно из критических состояний, когда дело доходит до реализации этого типа приводов, заключается в варианте и конструкции или упругом элементе.
Основными техническими характеристиками, которые отличаются в зависимости от функции применяемых приводов, используемыми для характеристики упругого элемента, который должен использоваться в упругих приводах, являются:
- жесткость;
- максимальная допустимая нагрузка;
- допустимый поворот или деформация;
- вес;
- габаритные размеры (форма).
Обращаясь к случаям с поворотными приводами, чья область является более конкретной задачей настоящего изобретения, и, таким образом, упругим элементам, в которых осуществляется передача напряжения кручения, предшествующий уровень техники предусматривает различные варианты осуществления.
Вообще говоря, торсионный упругий элемент может быть получен использованием одного из следующих элементов:
- проволочной винтовой торсионной пружины;
- механически обработанной (из цельного блока) винтовой торсионной пружины;
- спиральной торсионной пружины;
- механизма, который преобразует линейное пружинное действие в торсионное ответное действие;
- торсионного специального элемента ответного действия.
Использование проволочных винтовых торсионных пружин влечет за собой следующие проблемы:
- низкую жесткость в отношении требований, установленных применением робототехнических средств;
- сложность взаимодействия с последовательными с ней элементами. Крутящий момент передается через контакт между элементом и проволокой пружины, которая, в случае высоких деформаций, скользит по поверхности контакта с элементом;
- сложность в получении би-направленной ответной реакции. Для того чтобы получить элемент, способный работать в обоих направлениях вращения, необходимо создать механизм, снабженный, по меньшей мере, двумя пружинами с последующим увеличением сложности, массы и размеров;
- контакт между витками при движении;
- исключительный общий объем, обусловленный наличием пружинящих рычагов.
Механически обработанные пружины [10], используемые в качестве торсионных пружин, устраняют некоторые из вышеупомянутых недостатков. В частности, они являются металлическими цилиндрами, в которых образована винтовая выемка с одним или несколькими началами, так что цилиндр принимает винтовую форму.
Одно из главных преимуществ этого типа пружин заключается в возможности обеспечения их концов (чтобы стать поверхностью взаимодействия с элементами, к которым они прикрепляются) с различными формами и системами крепления, которые позволяют формировать различные соединения (резьбовые отверстия, резьбовые концы, зубчатый профиль и т.д.).
Тем не менее, подобно проволочным пружинам эти пружины имеют предпочтительное направление вращения, и это делает их не подходящими для использования в применениях, в которых предполагается применение крутящих моментов в обоих направлениях вращения, и они требуют одинакового торсионного ответного действия в обоих направлениях.
Кроме того, использование спиральных пружин позволяет преодолеть некоторые недостатки проволочных винтовых пружин, но остается невозможность получения двунаправленного ответного действия без использования более чем одной пружины и соединительного механизма.
При использовании линейных пружин в собранном устройстве, которые преобразуют их линейное ответное действие в торсионное выходное ответное действие, может быть получено двунаправленное ответное действие с желаемыми жесткостью и передаваемыми характеристиками крутящего момента. Недостатки, связанные с этим типом решения, главным образом, лежат в большом габаритном размере, необходимом для реализации всей сборки.
Среди известных примеров торсионных пружин, образованных исходя из соответствующим образом обработанного металлического элемента с целью придания элементу желаемых свойств, торсионная пружина, раскрытая в [6], представляет собой упругий привод, используемый при реабилитационной ходьбе. Упругий элемент, используемый в приводе, получают из пластинчатого стального тела, в котором образованы две спиральные выемки. Элемент обнаруживает некоторые проблемы в связи с гистерезисом, контактом между витками, что ограничивает прилагаемую нагрузку, и относительно высокой разницей между жесткостью, смоделированной по методу конечных элементов, и фактической жесткостью.
Вышеупомянутый вариант осуществления аналогичен варианту, описанному выше в [7]. Форма упругого элемента, в целом, аналогична предыдущей форме, несмотря на увеличение жесткости при кручении и попытку преодолеть проблемы гистерезиса и контакта между витками. Документ [8] описывает подобную пружину с предыдущими пружинами, используемыми в гидроупругом приводе для реабилитации верхней конечности.
Другой тип торсионной пружины, полученной механической обработкой стального элемента, описан в [9]; в этом случае металлический диск покрыт углублениями так, чтобы получить лучи в виде слоистых витков, которые соединяют ступицу и внешний бандаж. Будучи в форме диска, этот элемент имеет высокое соотношение диаметр/высота. Максимальный применимый крутящий момент ограничен возникновением контакта между витками.
В публикации WO 2008US61560 раскрыт торсионный элемент, в котором упругое ответное действие получено путем соединения двух параллельных фланцев S-образных элементов. Элементы для соединения двух фланцев имеют стержни, сложенные и закрепленные на элементах, предназначенных для входного и выходного крутящего момента в системе. Согласно упрощенному варианту, представленному в US 20070698811, соединение между фланцами для входного и выходного крутящего момента достигается использованием прямых стержней, а не S-образных. Эти сложные системы, которые требуют сборки множества частей, следовательно, подразумевают различные осложнения. Соединения между элементами должны быть стабильными и без зазора, с тем, чтобы избежать режима передачи крутящего момента (характеристика угол/крутящий момент) не с высокой по точностью повторяемости или иного от желаемого крутящего момента и возникновения неожиданного напряжения, потенциально вызывающего повреждение конструкции. Кроме того, обработка всех элементов должна быть очень точной, чтобы избежать возникновения остаточных напряжений после сборки, которые могут изменить характеристику упругого элемента или уменьшить его сопротивление.
Опять же, вышеупомянутый патент США № 5910720 предоставляет торсионную пружину, полученную посредством элемента, имеющего крестообразные участки и, таким образом, использующего пластины в качестве основного элемента передачи крутящего момента. Тем не менее, крест представляет собой конфигурацию пластин, работающих, по существу, "параллельно", следовательно, требующих, с целью получения высокого передаваемого соотношения крутящий момент/жесткость, то есть высокого передаваемого крутящего момента, но ограниченной жесткости (высокой деформируемости), использования очень тонких пластин (чрезмерных напряжений) или увеличения продольного размера объекта (избыточного габаритного размера).
Другой известный торсионный элемент ответного действия раскрыт в патентной публикации EP 1244817. В этом случае торсионное свойство получено путем образования на цилиндрическом кольце, ответственном за передачу крутящего момента между входным элементом и выходным элементом, ряда выемок, которые с радиальным расширением образуют множество сегментов, в свою очередь, расширяющихся в соответствии с радиальными плоскостями, которые проходят через ось кручения. Все устройство реализовано из нескольких частей, которые требуют жесткого и точного взаимного соединения. Кроме того, получение выемок в радиальных направлениях требует выполнения ряда прорезей на теле кольца, с результирующим конструктивным усложнением, вытекающим из необходимости изменения снова и снова взаимного размещения между телом и режущим инструментом. Кроме того, будучи передающими сегментами, расположенными в кольцеобразном теле, они по-прежнему смещены от оси кручения, и, таким образом, они имеют тенденцию деформироваться при сгибании, получая неудовлетворительное соотношение между передаваемым крутящим моментом и жесткостью.
Сущность изобретения
Задачей настоящего изобретения является создание компактного работающего на кручение упругого элемента, обеспеченного линейной характеристикой угол/крутящий момент, которая также не зависит от направления вращения, и который легко получить, позволяя избежать нежелательного контакта между его частями, имеющего высокую способность сопряжения с элементами, к которым он должен быть присоединен, и способного достичь высокого передаваемого крутящего момента по отношению к его массе и габаритным размерам.
Эти и другие задачи решаются посредством создания торсионной пружины в соответствии с настоящим изобретением, чьи существенные признаки определены в первом пункте прилагаемой формулы изобретения. Другие важные характеристики определены зависимыми пунктами формулы изобретения.
Краткое описание чертежей
Признаки и преимущества торсионной пружины в соответствии с настоящим изобретением должны стать более понятными из нижеследующего описания вариантов его осуществления, предусмотренных исключительно посредством неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
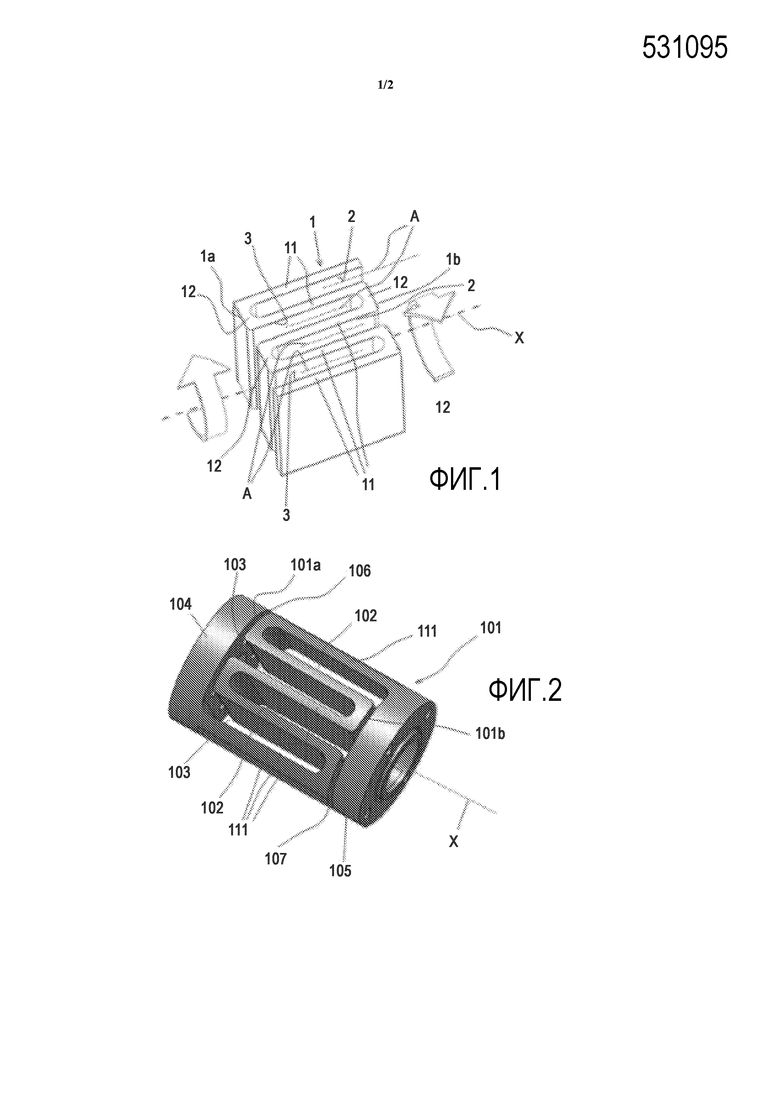
Фиг.1 - вид в аксонометрии концептуальной структуры по изобретению, который также представляет собой первый и простейший вариант осуществления;
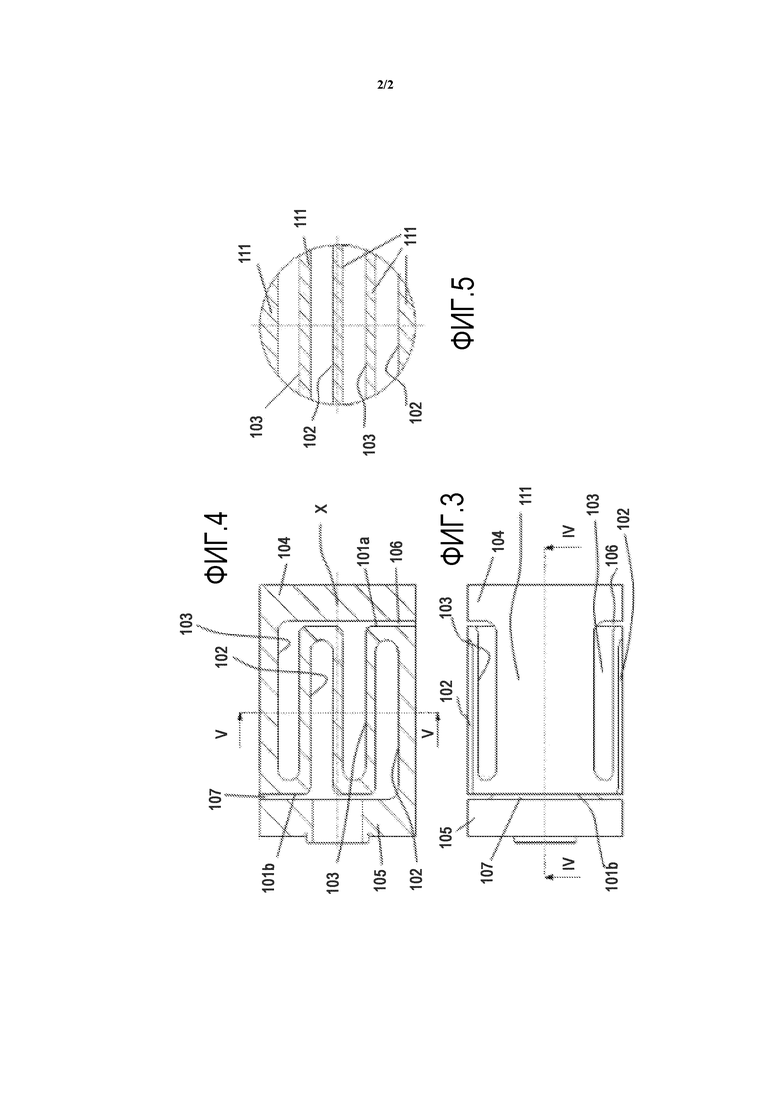
Фиг.2 - вид в аксонометрии второго варианта осуществления пружины согласно изобретению;
Фиг. 3 - вид сбоку пружины с фиг.2;
Фиг.4 - вид в разрезе пружины по линии IV-IV с фиг.3; и
Фиг.5 - вид в разрезе пружины по линии V-V с фиг.4.
Подробное описание изобретения
Обращаясь к вышеприведенным чертежам, упругий элемент согласно изобретению представляет собой, как правило, металлический элемент, который, вследствие соответствующей обработки, принимает характеристики торсионной пружины с требуемой жесткостью и свойствами передаваемого крутящего момента. Обычно, начиная с твердого цельного тела блока, материал отнимается таким образом, чтобы получить распределение углублений, как будет описано далее.
В частности, со ссылкой теперь только на фиг.1, тело 1, в этом случае в форме параллелепипеда, имеет ось Х, которая центрально пересекает тело и которая представляет собой центральную ось крутящего момента или момента кручения, который предназначен для передачи (между приводом и нагрузкой) путем использования самого тела. Такая ось должна быть физически определена как линия, которая соединяет два противоположных крепления, образованные в теле или связанные с ним, не показаны в данном случае, для присоединения тела к приводу и к приводимому элементу, в свою очередь, не представленному. Соединение осуществляется с помощью соответствующих подшипников для изоляции тела от любого напряжения, отличного от напряжения кручения. Противоположные стороны, соответствующие сторонам крепления, обозначены 1а и 1b.
Согласно изобретению тело 1 имеет выемки 2, 3, главным образом, создаваемые согласно плоскостям А с параллелизмом, зависящим в отношении оси X, которые, в случае с телом в форме параллелепипеда, могут быть также определены как параллельные по сравнению друг с другом, а также к боковым граням параллелепипеда. Предпочтительно распределение выемок 2, 3 имеет симметрию в отношении плоскости, перпендикулярной плоскостям А и проходящей через ось X, а также существенную симметрию, с пространственной точки зрения, в отношении к плоскости, перпендикулярной плоскостям А и пересекающей промежуточную точку тела 1 (промежуточную точку, намеченную в отношении удлинения вдоль оси Х кручения).
Еще в соответствии с предпочтительным решением выемки 2, 3 являются сквозными выемками, то есть открытыми с трех сторон, где имеется закрытая сторона для различных параллельных и совмещенных выемок, периодически и поочередно на любой из поверхностей 1а и 1b крепления. Выемки 2 имеют вид, закрытый на стороне 1а, в то время как выемки 3 имеют вид, закрытый с противоположной стороны. На практике из-за такой конфигурации тело 1 принимает извилистую развертываемую форму, где разделение на части, перпендикулярные плоскостям A и двум поверхностям 1a, 1b, определяется пластинчатыми сегментами 11, разнесенными по толщине (измерению в направлении, перпендикулярном плоскостям А) выемок 2, 3. Соединения между сегментами 11, которые закрывают выемки на сторонах 1a, 1b, обозначены 12.
Получающаяся при кручении работа, безусловно, аналогична работе пластины с длиной, эквивалентной сумме длин (размеру вдоль Х) различных пластинчатых сегментов 11, но с разницей, заключающейся в том, что соединения 12 усиливают структуру по отношению к эквивалентной пластине. Еще одно отличие в ответной реакции заключается в том, что в гипотетически эквивалентной пружине, изготовленной с использованием единственной пластины, материал находится полностью по обеим сторонам оси кручения, а в случае извилистой формы наиболее периферийные пластинчатые сегменты находятся в состоянии не полностью напряжения кручения и они вызывают более жесткую всеобщую ответную реакцию.
Компактность полученной структуры, особенно в осевом направлении, имеет, по этой причине, существенное преимущество, желаемую жесткость, оптимизируемую посредством воздействия на различные геометрические параметры, такие как, в частности, толщина сегментов 11, размеров по их высоте, т.е. их размеру по плоскостям А, перпендикулярным X, и размерам в длину, то есть размеру по плоскостям А, параллельным X. В частности, жесткость элемента возрастает по мере увеличения толщины и высоты и уменьшается, когда длина по оси всей структуры увеличивается.
Очевидно, основной вариант для получения требуемых характеристик заключается в используемых материалах; наиболее подходящими материалами являются металлы, обычно используемые в механических конструкциях. Они включают в себя сталь, алюминиевые сплавы и титановые сплавы. В первую очередь, выбранный материал может быть идентифицирован по модулю Юнга, основному параметру для получения желаемых характеристик жесткости элемента. Кроме желаемой жесткости, следует выбор материала, который должен быть использован непосредственно, величины нагрузки, которую пружина должна быть способна выдержать, и степени пространственной компактности, которая должна быть получена. Коленчатые соединения 12 между пластинчатыми сегментами 11 представляют области концентрации напряжений; чем выше стойкость материала, тем уже выемка между двумя последовательными сегментами должны быть, и меньше общая толщина элемента (как упоминалось, в качестве толщины подразумевается измерение в направлении, перпендикулярном к плоскостям А).
Как показано на фиг. 2-5, второй вариант торсионной пружины согласно изобретению обеспечивает цилиндрическое тело 101, вместо тела параллелепипеда. Извилистая конфигурация с выемками 102, 103 и пластинчатыми сегментами 111 является, однако, полностью аналогичной предыдущей конфигурации и в этом случае содержащей пластинчатые сегменты, параллельные друг другу и оси Х, за исключением того, что сегменты, понятно, не имеют одинаковую высоту, как в предыдущем случае, а они уменьшаются в отношении этого размера, по мере того как они отодвигаются от оси X, из-за круговой кривизны тела.
Кроме того, в этом варианте осуществления толщина сегментов 111 не является постоянной, а (фигуры 4 и 5) она увеличивается постепенно для самых периферийных сегментов, с целью согласования напряжения в материале из-за кручения. Действительно, периферийные сегменты должны выдерживать большие удельные напряжения, обусловленные характером торсионного напряжения, и, как уже упоминалось выше, они также имеют меньшую высоту по отношению к центральным сегментам.
Этот вариант осуществления также содержит два фланцевых крепления 104, 105, соответственно, по сторонам 101а, 101b, в свою очередь, получаемых в том же твердом теле блока благодаря двум поперечным разрезам 106, 107, которые - в цилиндре 101 - практически отделяют фактически извилистый участок от концов цилиндра, образуя два дискообразных участка, которые затем соответствующим образом обрабатываются, чтобы сделать их приспособленными для требуемых механических соединений. Поперечные разрезы останавливаются, прежде чем полностью отрезать цилиндрический участок, оставляя соответствующие соединительные перемычки между извилистым участком и дисками. Предпочтительно такие перемычки находятся в диаметрально противоположных положениях.
В частности, выемки и прорези могут быть получены с помощью электроискровой эрозии на мартенситностареющих стальных стержнях (Böhler W720, модуль Юнга: 193 ГПа, предел текучести 1815 МПа). Совместимость с размерами выемок и с размером участка всего элемента обработки может быть получена путем механической обработки посредством удаления стружки. Пружина, полученная таким образом, имеющая характеристику угол/крутящий момент, которая является линейной и свободной от гистерезиса, приспособлена для достижения жесткости при кручении 100 Н·м·рад-1 и передаваемого крутящего момента не менее 30 Н·м.
Концы извилистого элемента могут быть образованы различными способами, приспособленными для обеспечения сопряжения деформируемого элемента с различными типами механических элементов, очевидно, согласно тому, что может быть реализовано специалистом в данной области техники. Соединения/элементы крепления, которые могут быть использованы, могут включать фланцевые соединения с винтами, соединения вал/ступица, зубчатые профили, шплинты, шпонки, радиальные шпильки, шлицевые элементы и т.д.
Таким образом, настоящее изобретение позволяет преодолеть трудности реализации торсионного упругого элемента, который является компактным, надежным и относительно легким и который одновременно позволяет передавать высокие крутящие моменты с высокой деформируемостью, в частности, благодаря расположению выемок (и сегментов) параллельными друг другу и к центральной оси крутящего момента. Реализация в виде единой детали позволяет избежать какого-либо нежелательного контакта между подвижными частями во время использования, а элементу также легко взаимодействовать с частями, к которым он должен быть присоединен.
Другие преимущества, которые могут возникнуть в результате использования торсионной пружины согласно изобретению, включают:
- легкость параметризации размеров с целью получения пружин с желаемыми характеристиками;
- возможность создания концов пружины для использования различных способов крепления между пружиной и элементами, с которыми она должна быть соединена;
- возможность получения обработки непосредственно на валу, таким образом, делая ее внутренне упругой.
Пружина применяется, главным образом, в области робототехники и, в частности, носимой робототехники. Размеры, жесткость и характеристики передаваемого ею крутящего момента, ее и высокая способность к взаимодействию с другими элементами делает настоящее изобретение полезным для получения упругих приводов для носимых роботов и для роботов в целом. На самом деле, в этих применениях является основополагающим использование приводов с ограниченными весами и габаритами, в то же время удовлетворяющими потребности передачи относительно больших крутящих моментов и сил. Упругий привод согласно изобретению, в комплекте со всеми элементами, может быть собран непосредственно на роботе. Применимость пружины, однако, не ограничивается областью робототехники, но она также может быть расширена во всех областях, которые требуют использования торсионных пружин с заданной жесткостью и передаваемыми характеристиками крутящего момента.
Настоящее изобретение было описано со ссылкой на предпочтительные варианты его осуществления. Тем не менее, могут быть предусмотрены другие варианты осуществления одной и той же концепции изобретения, попадающие в объем защиты прилагаемой формулы изобретения.
Перечень литературы
[1] G. Pratt and M. M. Williamson, “Series elastic actuators” ("Последовательность упругих приводов") in Proc. IEEE Int. Conf. Intell. Robots Syst., Pittsburgh, PA, 1995, стр. 339–406.
[2] J. F. Veneman, R. Ekkelenkamp, R. Kruidhof, F. C.T. van der Helm and H. van der Kooij "A Series Elastic- and Bowden-Cable-Based Actuation System for Use as Torque Actuator in Exoskeleton-Type Robots" ("Последовательная упругая и основанная на Боуденовском тросе приводная система для использования в качестве механизма передачи крутящего момента в экзоскелетного типа роботах") The International Journal of Robotics Research 2006 25: 261 DOI: 10.1177/0278364906063829.
[3] J.AND. Pratt, B.T. Krupp, C.J. Morse, S.H. Collins. “The RoboKnee: An Exoskeleton for Enhancing Strength and Endurance During Walking” ("RoboKnee: Экзоскелет для улучшения сила и выносливости во время ходьбы") Proceedings of the 2004 IEEE International Conference on Robotics & Automation New Orleans, THE - апрель 2004.
[4] AND. Torres-Jara and J. Banks. A simple and scalable force actuator. (“Простой и масштабируемый силовой привод”) In Proceedings of 35th International Symposium on Robotics, Париж, Франция, 2004.
[5] Nicholas Paine and Luis Sentis A New Prismatic Series Elastic Actuator with Compact Size and High Performance (“Новый призматический последовательный упругий привод с компактным размером и высокой производительностью”).
[6] Claude Lagoda, Alfred C. Schouten, Arno H. A. Stienen, Edsko AND. G. Hekman, Herman van der Kooij "Design of an electric Series Elastic Actuated Joint for robotic gait rehabilitation training" ("Конструкция электрического последовательного упругого приводимого в действие соединения для роботизированной реабилитационной тренировки походки") Proceedings of the 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics", Токийский Университет, Токио, Япония, Сентябрь 26-29, 2010.
[7] Wang, Shiqian, et al. "Efficient Lightweight Series Elastic Actuation for an Exoskeleton Joint." ("Эффективный легкий последовательный упругий привод для экзоскелетного соединения").
[8] A. H. A. Stienen, AND. AND. G. Hekman, H. ter Braak, et al., “Design of a rotational hydro-elastic actuator for a powered exoskeleton for upper-limb rehabilitation” ("Конструкция вращательного гидроупругого привода для механизированного экзоскелета для реабилитации верхней конечности") IEEE Trans. Biomed. Eng., том 57, номер 3, стр. 728–735, Март 2010.
[9] F. Sergi, D. Accoto, G. Carpino, N.L. Tagliamonte, AND. Guglielmelli, “Design and Characterization of a Compact Rotary Series Elastic Actuator for Knee Assistance During Overground Walking” ("Конструкция и характеристика компактной поворотной последовательного упругого привода для помощи колену во время наземной ходьбы"), in Proc. IEEE Int. Conf. on Biomed. Rob. and Biomech., стр. 1931-1936, 2012.
[10] Helical Products Company, Inc. http://www.heli-cal.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНИТЕЛЬНЫЙ КОМПОНЕНТ ДЛЯ ПЕРЕДАЧИ КРУТЯЩЕЙ НАГРУЗКИ С УПРУГОЙ РЕАКЦИЕЙ | 2017 |
|
RU2721040C1 |
| АКТЮАТОР | 2007 |
|
RU2375688C2 |
| СИСТЕМА ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДЛЯ ОРТЕЗА ТАЗОБЕДРЕННОГО СУСТАВА | 2016 |
|
RU2708223C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 1997 |
|
RU2156025C2 |
| ТОРСИОН ДЛЯ ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2509238C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО, ПЕРЕДАЮЩЕЕ КРУТЯЩИЙ МОМЕНТ, СОДЕРЖАЩЕЕ СОЕДИНЕННЫЙ С НИМ ИНСТРУМЕНТ | 2013 |
|
RU2648227C2 |
| ГИБРИДНЫЙ КОМПОЗИТНЫЙ ТОРСИОН ДЛЯ БЕСШАРНИРНОГО НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА (ВАРИАНТЫ) | 1995 |
|
RU2136542C1 |
| ДАТЧИК-ИЗМЕРИТЕЛЬ МАЛЫХ КРУТЯЩИХ МОМЕНТОВ | 1999 |
|
RU2162217C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО, ПЕРЕДАЮЩЕЕ КРУТЯЩИЙ МОМЕНТ, СОДЕРЖАЩЕЕ СОЕДИНЕННЫЙ С НИМ ИНСТРУМЕНТ | 2013 |
|
RU2641837C2 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
Настоящее изобретение относится к торсионным пружинам, а именно к элементам передачи. Элемент передачи с упругим ответным действием для передачи напряжения кручения между приводящим элементом и приводимым элементом содержит твердое тело (1) блока и крепления. Крепления для приводящего элемента и приводимого элемента образованы в указанном теле или связаны с ним в противоположных положениях и выровнены вдоль центральной оси (X) напряжения кручения. Распределенные сквозные выемки (2, 3) образованы в упомянутом теле (1), причем выемки (2, 3) выполнены параллельными и расположены в основном согласно плоскостям (А) с параллельным взаимным расположением относительно центральной оси (Х). Твердое тело блока состоит из разнесенного множества пластинчатых сегментов (11, 111), при этом упомянутые сегменты параллельны друг другу и центральной оси (Х). Достигается обеспечение линейной характеристики угол/крутящий момент. 8 з.п. ф-лы, 5 ил.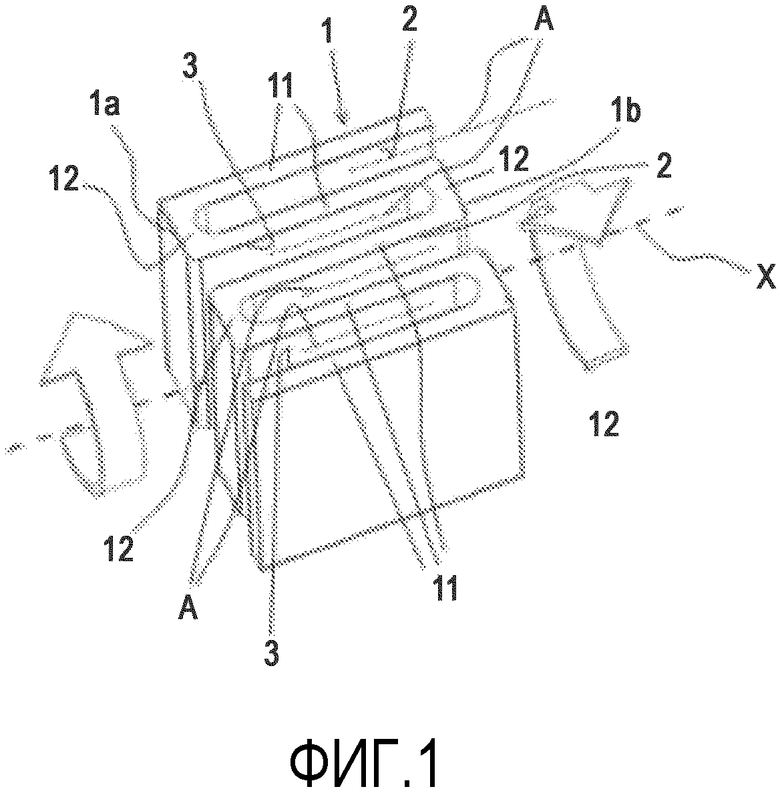
1. Элемент передачи с упругим ответным действием для передачи напряжения кручения между приводящим элементом и приводимым элементом, при этом элемент передачи содержит: твердое тело (1) блока; крепления для приводящего элемента и приводимого элемента, образованные в указанном теле или связанные с ним в противоположных положениях, выровненных вдоль центральной оси (X) напряжения кручения; и распределенные сквозные выемки (2, 3), образованные в упомянутом теле (1), причем выемки (2, 3) выполнены параллельными и расположенными, в основном, согласно плоскостям (А) с параллельным взаимным расположением относительно центральной оси (Х), и разнесенное множество пластинчатых сегментов (11, 111) твердого тела блока, при этом упомянутые сегменты параллельны друг другу и центральной оси (Х).
2. Элемент по п.1, в котором выемки (2, 3) распределены симметричным образом относительно плоскости, перпендикулярной плоскостям (А) и проходящей через ось (X), а также, по существу, симметрично относительно плоскости, перпендикулярной плоскости (А) и пересекающейся в промежуточной точке удлинения тела (1), измеренной по центральной оси.
3. Элемент по п. 1 или 2, в котором выемки являются закрытыми попеременно на обеих сторонах (1а, 1b) тела (1), которые являются взаимно противоположными вдоль центральной оси (Х) и соответствуют соответствующему креплению к приводящему элементу и приводимому элементу, чтобы образовать извилистый участок, включающий пластинчатые сегменты (11), разнесенные на толщину выемок (2, 3) и соединенные соединениями (12), которые образуют закрытие выемок на противоположных сторонах (1a, 1b).
4. Элемент по п.3, в котором упомянутое тело (1) является параллелепипедом.
5. Элемент по п.3, в котором упомянутое тело (1) является цилиндрическим.
6. Элемент по п.5, в котором толщина пластинчатых сегментов (11) постепенно увеличивается, когда сегмент располагается дальше от центральной оси (Х).
7. Элемент по п. 5 или 6, в котором крепления (104, 105) имеют дискообразную форму, в результате соответствующих поперечных разрезов (106, 107), образованных в цилиндрическом теле, чтобы отделить извилистый участок от осевых концов того же тела, при этом поперечные разрезы (106, 107) оставляют соответствующие соединительные перемычки, соединяющие извилистый участок с дискообразными креплениями.
8. Элемент по п.7, в котором перемычки находятся в диаметрально противоположных положениях.
9. Элемент по п.1, в котором выемки образованы сквозными вырезами материала из цельного тела.
| МУФТА ДЛЯ НЕРАЗЪЕМНОГО СОЕДИНЕНИЯ ВАЛОВ | 0 |
|
SU375416A1 |
| US 6203437 B1, 20.03.2001 | |||
| СПОСОБ РАЗДЕЛЕНИЯ БИНАРНЫХ ИЛИ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ СИСТЕМЫ ЖИДКОСТЬ - ПАР | 1987 |
|
RU1557958C |

