1.1. Область техники, к которым относится изобретение
Изобретение относится к испытательной технике, а именно к измерению критических скоростей ротора, работающего в зарезонансной области.
1.2. Уровень техники
Определение критических скоростей вращения роторов машин методом тензометрирования описано в работе Г.С. Маслова (Маслов Г.С. / Расчеты колебаний валов. - М.: Машиностроение. 1980. - С. 129-131). Для этого на противоположных сторонах вала ротора симметрично наклеивают два или четыре тензодатчика (тензометра). Электрическое соединение тензометров с измерительной аппаратурой осуществляется с помощью ртутного или щеточного токосъемника, который устанавливается на свободном торце вала. Измерительная аппаратура включает в себя усилитель и шлейфовый или катодный осциллограф. В период проведения эксперимента на экране осциллографа следует наблюдать за уровнем амплитуд колебаний и движением средней линии записи от ее начального положения при нерабочем состоянии системы. Тензометрирование позволяет определить постоянную и переменную составляющие деформации вала в месте наклейки тензометров. Если увеличение постоянной составляющей свидетельствует о степени приближения вала к критическим скоростям, то вторая характеризует уровень изгибных колебаний вала. Осциллографирование рекомендуется проводить при ступенчатом изменении частоты вращения (через 50-100 об/мин).
В случае обнаружения резонансного режима для определения критических скоростей осуществляют медленное увеличение или уменьшение числа оборотов в минуту.
Подобный метод использован на лабораторной установке для демонстрации прецессионных движений, описанной в книге Г.С. Скубачевского (Скубачевский Г.С. / Авиационные газотурбинные двигатели. Конструкция и расчет деталей. - М.: Машиностроение. 1969. - с. 542). Лабораторная установка состояла из вала, расположенного на двух опорах с диском между ними, электродвигателя постоянного тока с регулируемым числом оборотов и дополнительными устройствами для вызывания прецессии: прямой или обратной. На валу наклеены четыре тензометра, ток от которых, характеризующий изменение напряжений во вращающемся валу, воспринимается с помощью токосъемника и через усилитель подается на шлейфовый осциллограф. На установке можно демонстрировать прецессионное движение вала и получать экспериментальные кривые изменения частот собственных изгибных колебаний вращающегося вала с одним диском по угловой скорости, в том числе определять критические скорости.
Другой способ определения критических скоростей вала с дисками приведен в описании патента RU 2024953 Учебная установка для демонстрации способов определения критических оборотов ротора, авторы: Г.П. Белов, Ю.А. Дмитриев, Е.В. Ерохина, И.Н. Куприянов. Предлагаемая лабораторная установка содержит вал на двух опорах, два диска, один из которых установлен между опорами, а второй - в консольной части вала, систему измерения прогиба вала и числа оборотов вала, состоящую из индуктивного датчика, датчика тахометра, пьезощупа, шлейфового осциллографа и электроннолучевого осциллографа. Для вращения вала используется электродвигатель постоянного тока. При подаче питания на электродвигатель, величина оборотов которого плавно изменяется с помощью реостата, начинает вращаться вал. Датчик тахометра замеряет текущие обороты вращения вала и передает электрический сигнал на шлейфовый осциллограф. Индуктивный датчик замеряет величину прогиба вала. Сигнал с индуктивного датчика также поступает на шлейфовый осциллограф. В результате на осциллограмме одновременно записываются величина прогиба вала и метки числа оборотов в минуту. Максимальные амплитуды будут соответствовать критическим скоростям вращения вала с дисками.
Кроме того, установка позволяет демонстрировать способ определения критических оборотов ротора по статическому прогибу вала и способ определения критических оборотов ротора по частоте собственных поперечных колебаний, которые находятся из осциллограмм колебаний вала при их возбуждении ударом.
Такие же способы экспериментального определения критических скоростей предлагаются на лабораторной установке, описанной в учебном пособии: Москаленко Л.В., Папушин М.В., Умушкин Б.П., Чичков Б.А. / Пособие по выполнению экспериментальных лабораторных работ по дисциплине «Конструкция и прочность авиационных двигателей». - М.: Изд-во Моск. гос. техн. ун-та гражд. авиации, 2004. - С. 25-32. Лабораторная работа №4 «Экспериментальное определение критических режимов вращения ротора».
За аналог авторами выбран способ, описанный в международном стандарте ИСО 13373-1 «Контроль состояния и диагностика машин. Вибрационный контроль состояния машин. Часть 1. Общие методы». В этом документе на стр. 4 приведены типичные системы контроля вибрации роторных систем в реальном масштабе времени в стационарном и переносном вариантах. В том и другом случаях система представляет собой механизм привода (ротор), датчик перемещений вала, датчик фазы, датчик на опоре вала, устройство для формирования сигнала (сборщик данных), компьютер, принтер. Датчик на опоре является датчиком инерционного типа, выходной сигнал от которого характеризует абсолютную вибрацию опоры (корпуса). Датчик перемещений вала является устройством бесконтактного типа, который непосредственно измеряет перемещения и определяет положение вращающегося вала относительно опоры (корпуса). На стр. 29 в разделе 7.3.3 «Вибрация в процессе разгона (выбега)» формулируется положение о том, что под вибрацией в процессе разгона (выбега) здесь понимаются данные, снимаемые с датчиков и регистрируемые на компьютере в режимах пуска (останов). Эти данные позволяют определить отклик на дисбаланс, наличие резонансов машины, включая критические скорости роторов, демпфирования и др.
Данные измерения вибрации в процессе разгона (выбега) представляются в виде диаграмм Боде, Найквиста, Кембелла, из которых исходят критические скорости вращения ротора в соответствии с ГОСТ Р ИСО 13373-2-2009. «Контроль состояния и диагностика машин. Вибрационный контроль состояния машин. Часть 2. Обработка, анализ и представление результатов измерения вибрации».
В отличие от аналога, предлагаемый способ имеет более простую измерительную систему, состоящую из валика с маятником и оптического тахометра, показания которого в случае необходимости можно вывести на компьютер с принтером, и основывается на другом принципе, а именно на эффекте «застревания» маятника на критических скоростях ротора.
1.3. Раскрытие изобретения
В основе изобретения о способе определения критических скоростей ротора, работающего в зарезонансной области, лежит эффект «застревания» маятников [1], [2], [3]. Этот эффект был обнаружен при экспериментальном исследовании возможности автоматической балансировки роторов с помощью маятников, устанавленных на валу ротора с возможностью свободного вращения. Эксперимент показал, что при изменении моментов инерции массы маятников путем навешивания на него дополнительных грузиков с целью компенсации дисбаланса ротора обнаруживается такой режим движения, когда ротор вращается с заданной угловой скоростью, а маятник не может разогнаться до этой скорости и начинает вращаться с угловыми скоростями, совпадающими с критическими скоростями ротора. Поэтому это явление было названо эффектом «застревания» маятников. В работе [2] приведены результаты экспериментальных исследований разгона и стационарного движения ротора с маятниками, где изменялись моменты инерции массы маятников при постоянном моменте трения в их опорах и фиксировались те значения моментов инерции массы маятников, при которых наблюдалось совпадения угловой скорости маятников с критическими скоростями ротора. При компьютерном моделировании движения ротора с маятниками [1], [2], [3] изменялись моменты сопротивления в опорах маятников при постоянном моменте инерции массы маятников и также фиксировались те значения моментов сопротивления, при которых угловая скорость маятника совпадала с критическими скоростями ротора.
Таким образом, в результате теоретических и экспериментальных исследований установлено, что при определенных значениях момента инерции массы и момента сопротивления в опорах маятника, установленного на валу ротора с возможностью свободного вращения имеет место такой режим движения, при котором ротор вращается с заданной угловой скоростью, а угловая скорость мятников совпадает с одной из критических скоростей ротора.
Суть изобретения о способе определения критических скоростей ротора, работающего в зарезонансной области заключается в том, что в свободный торец вала ротора ввинчивается валик, на котором с помощью подшипника качения устанавливается с возможностью свободного вращения маятник с изменяемым моментом инерции его массы, и при вращении ротора с рабочей скоростью маятника в зависимости от момента инерции его массы и момента сопротивления в его опоре будет вращаться с угловой скоростью, равной одной из критических скоростей ротора.
Техническим результатом данного изобретения является результат измерения критических скоростей ротора Предлагаемый способ определения критических скоростей ротора не только расширяет арсенал способов их измерения, но и является более простым и экономичным по сравнению с аналогом.
1.4. Краткое описание чертежей
Схемы установки маятника на различных роторах и измерение угловой скорости маятника приведены на Фиг. 1, Фиг. 2, Фиг. 3.
На Фиг. 1 изображен ротор 1 с жестким валом 2, установленным на упругих опорах 3. В свободном торце вала 2 ротора 1 изготавливается отверстие с резьбой, куда ввинчивается валик 4, на котором устанавливается маятник 5. Измерение угловой скорости вращения вала ротора и угловой скорости маятника осуществляется оптическим тахометром 6.
На Фиг. 2 изображен ротор 1 с гибким валом 2 установленный в жестких опорах 3. В торце вала 2 ротора 1 ввинчивается валик 4, на котором закреплен маятник 5. Цифрой 6 на Фиг. 2 обозначается позиция оптического тахометра.
На Фиг. 3 изображен ротор 1 с жестким валом 2, установленный с помощью жестких опор 3 в корпусе 7 на упругих опорах 8. В торце вал 2 ротора 1 ввинчивается валик 4 с маятником 5. Измерения угловой скорости вала и маятника осуществляется оптическим тахометром 6.
На Фиг. 4 изображена конструкция маятника, установленного на валике 4 и состоящего из шарикоподшипника 9, металлического кольца 10, шпильки 11, приваренной к кольцу и имеющей резьбу для установки грузиков 12.
1.5. Осуществление изобретения
После установки валика с маятником в торце вала ротора включается электродвигатель, начинает вращаться ротор и начинает за счет трения в подшипнике вращаться маятник на валике. Здесь могут быть следующие случаи.
1. Маятник начинает вращаться с угловой скоростью ротора. Тогда необходимо увеличивать момент инерции маятника путем навешивания на шпильку маятника грузиков. После каждого навешивания с помощью оптического тахометра измеряется угловая скорость (частота) вращения маятника. Навешивание грузиков необходимо продолжать до тех пор, пока угловая скорость (частота) вращения маятника первый раз будет отличаться от угловой скорости (частоты) вращения ротора. Это значение угловой скорости вращения маятника будет являться значением верхней в измеренном диапазоне критической скоростью ротора или резонансной частотой конструкции в случае ротора, установленного в корпусе на упругих опорах (Фиг. 3). После этого необходимо продолжить изменение момента инерции маятника путем навешивания грузиков для нахождения более низких критических скоростей ротора (резонансных частот конструкции ротора, установленного в корпусе).
2. Маятник начинает вращаться с угловой скоростью, отличной от угловой скорости ротора. Тогда можно сделать вывод о том, что это значение угловой скорости и есть значение одной из критических скоростей ротора. Для нахождения других критических скоростей ротора или резонансных частот конструкции в случае ротора, установленного в корпусе на упругих опорах (Фиг. 3), необходимо изменять момент инерции маятника как в сторону его уменьшения, так и в сторону увеличения путем навешивания или снятия грузиков.
3. Маятник не вращается, а колеблется около своего нижнего положения равновесия. Тогда необходимо уменьшить его момент инерции или путем снятия грузиков, или заменой шпильки маятника. Постепенное уменьшение момента инерции маятника приведет к тому, что маятник начнет вращаться с угловой скоростью, значение которой соответствует низшей в измеряемом диапазоне критической скорости ротора или резонансной частоте конструкции в случае ротора, установленного в корпусе на упругих опорах (Фиг. 3).
В отдельных случаях, чтобы преодолеть момент сопротивления в опоре маятника, его необходимо подтолкнуть, и он начнет вращаться с угловой скоростью, равной критической скорости ротора.
Список литературы
1. Артюнин А.И. Исследования движения ротора с автобалансиром. // Известия вузов. Машиностроение. - 1993. - №1. - С. 15-19.
2. Артюнин А.И, Алхунсаев Г.Г. Об особом режиме движения жесткого ротора с упругими опорами и маятниковым автобалансиром. // МГТУ им. Н.Э. Баумана. Известия высших учебных заведений. Машиностроение. - 2005. - №10. - С. 8-14.
3. Елисеев С.В., Артюнин А.И. Механико-математическое моделирование эффекта застревания маятников на вращающемся роторе // Вестник Белорусского гос. ун-та транспорта БелГУТа: Наука и транспорт. - Гомель, Республика Беларусь, 2016. - №2 (33). - С. 172-175. с. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения собственных частот колебаний механической системы с помощью вращающегося маятника | 2015 |
|
RU2647513C2 |
| УЧЕБНАЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ СПОСОБОВ ОПРЕДЕЛЕНИЯ КРИТИЧЕСКИХ ОБОРОТОВ РОТОРА | 1991 |
|
RU2024953C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ ТРУЩИХСЯ ПАР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2785527C1 |
| Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями | 2023 |
|
RU2814668C1 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
| СПОСОБ НАСТРОЙКИ НА РЕЗОНАНСНУЮ ЧАСТОТУ КОЛЕБАНИЯ ИСПЫТЫВАЕМЫХ ЛОПАТОК РАБОЧЕГО КОЛЕСА | 1991 |
|
RU2029274C1 |
| СПОСОБ ОПЕРАТИВНОЙ ИНДИКАЦИИ НАЧАЛА РЕЗОНАНСА РОТОРНЫХ СИСТЕМ | 2010 |
|
RU2426081C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |


Изобретение относится к области электротехники и может быть использовано для измерения критических скоростей роторов машин, работающих в зарезонансных областях скоростей вращения. Техническим результатом является повышение экономичности способа измерения и его упрощение. В способе измерения критических скоростей ротора в качестве индикатора возникающих процессов используют закрепляемый на валу машины вращающийся маятник. Движение маятника осуществляется на подшипнике качения, что обеспечивает достаточные возможности свободного движения. Оценка параметров критической скорости вращения вала ротора машины реализуется через наблюдение так называемого режима «захватывания», когда угловая скорость вращения маятника совпадает с угловой скоростью ротора, вращающегося с одной из критических скоростей. Режим захватывания может быть зафиксирован простыми измерительными средствами, например оптическим тахометром, с последующей обработкой информации на компьютере. 4 ил.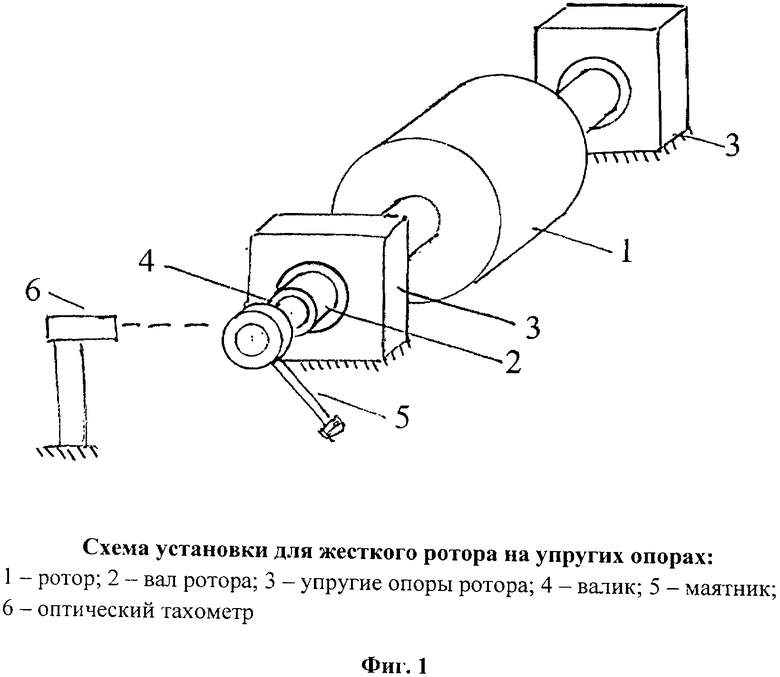
Способ определения критических скоростей ротора, работающего в зарезонансной области, заключающийся в том, что в свободный торец вала ротора ввинчивается валик, на котором с помощью подшипника качения устанавливается с возможностью свободного вращения маятник с изменяемым моментом инерции его массы, и при вращении вала ротора с рабочей угловой скоростью маятник в зависимости от его моментов инерции массы при постоянном моменте трения в его опоре начинает вращаться с угловыми скоростями и эти угловые скорости, которые измеряются оптическим тахометром, равны критическим скоростям ротора, отличающийся тем, что критические скорости определяют по наступлению события, при котором угловая скорость маятника отличается от угловой скорости ротора и является одной из критических скоростей ротора, а затем, изменяя момент инерции массы маятника как в сторону увеличения, так и в сторону уменьшения путем навешивания или снятия грузиков со шпильки маятника, определяют другие критические скорости ротора.
| АРТЮНИН А.И | |||
| Эффект "застревания" и особенности движения ротора с маятниковыми автобалансирами" | |||
| Электронный научно-технический журнал НАУКА и ОБОЗРЕНИЕ, 08.08.2013, с.443-452 | |||
| УЧЕБНАЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ СПОСОБОВ ОПРЕДЕЛЕНИЯ КРИТИЧЕСКИХ ОБОРОТОВ РОТОРА | 1991 |
|
RU2024953C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ВИБРАЦИОННЫЙ ГИРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334197C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| Измеритель угловой скорости | 1976 |
|
SU641343A1 |
| US 3111850 A, 26.11.1983 | |||
| US 3408873 A, 05.11.1968. | |||

