Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении и предназначено для измерения параметров промахов при стрельбе артиллерийскими снарядами или ракетами по воздушным целям (мишеням).
Известен электронный теодолит по патенту РФ 2437059, предназначенный для измерения угловых координат объекта наблюдения в реальном времени, содержащий опорно-поворотное устройство, механизмы горизонтального и вертикального наведения которого соединены механически соответственно с горизонтальным и вертикальным углоизмерительными датчиками, объектив, установленный на опорно-поворотное устройство, и связанное с ним оптически цифровое фотоприемное устройство канала наблюдения, содержащее матрицу фоточувствительных детекторов, волоконно-оптический канал передачи данных, первый вход которого соединен с выходом фотоприемного устройства, второй и третий входы которого соединены с выходами горизонтального и вертикального углоизмерительного датчиков соответственно, блок дистанционной оперативной обработки измерительной информации, содержащий интерфейс скоростного ввода данных, вход которого соединен с выходом волоконно-оптического канала передачи данных, первый выход соединен входом устройства измерения линейных координат, третий и четвертый выходы соединены соответственно с третьим и четвертым входами блока вычисления угловых координат, первый и второй входы которого соединены с первым и вторым соответственно выходами устройства измерения линейных координат, интерфейс вывода данных, вход которого подсоединен к выходу вычислителя угловых координат, выход подсоединен к первому входу регистратора, регистратор, первый вход которого соединен с выходом интерфейса вывода данных, дистанционный пульт управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов горизонтального и вертикального наведения, таймер, выход которого соединен со вторым входом регистратора, блок синхронизации, выходы которого соединены с входом вертикального углоизмерительного датчика, входом горизонтального углоизмерительного датчика, входом цифрового фотоприемного устройства и входом таймера, видеоконтрольное устройство, первый вход которого соединен с выходом цифрового фотоприемного устройства, второй вход – с выходом блока синхронизации.
Известный электронный теодолит обеспечивает высокоточное вычисление угловых координат в реальном темпе времени при высокой динамике движения цели. Однако оперативно оценивать относительные параметры промаха при стрельбе по мишеням затруднено из-за необходимости селекции тех снарядов (ракет), которые находятся в текущий момент времени в области поражения цели с заданным радиусом. Такую задачу можно решить, если наряду с оценкой угловых координат осуществлять оценку расстояния до мишени [1].
Предлагаемый электронный теодолит с блоком дистанционной оперативной обработки измерительной информации для измерения угловых координат и дальности и может быть реализован с помощью известных функциональных элементов.
Для достижения указанного технического результата в электронный теодолит с блоком дистанционной оперативной обработки измерительной информации, содержащий опорно-поворотное устройство, механизмы горизонтального и вертикального наведения которого соединены механически соответственно с горизонтальным и вертикальным углоизмерительными датчиками, объектив, установленный на опорно-поворотное устройство, и связанное с ним оптически цифровое фотоприемное устройство канала наблюдения, содержащего матрицу фоточувствительных детекторов, волоконно-оптический канал передачи данных, первый вход которого соединен с выходом фотоприемного устройства, второй и третий входы которого соединены с выходами горизонтального и вертикальный углоизмерительного датчиков соответственно, блок дистанционной оперативной обработки измерительной информации, содержащий интерфейс скоростного ввода данных, вход которого соединен с выходом волоконно-оптического канала передачи данных, первый выход соединен входом устройства измерения линейных координат, третий и четвертый выходы соединены соответственно с третьим и четвертым входами блока вычисления угловых координат, первый и второй входы которого соединены с первым и вторым соответственно выходами устройства измерения линейных координат, интерфейс вывода данных, вход которого подсоединен к выходу вычислителя угловых координат, выход подсоединен к первому входу регистратора, регистратор, первый вход которого соединен с выходом интерфейса вывода данных, дистанционный пульт управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов горизонтального и вертикального наведения, таймер, выход которого соединен со вторым входом регистратора, блок синхронизации, выходы которого соединены с входом вертикального углоизмерительного датчика, входом горизонтального углоизмерительного датчика, входом цифрового фотоприемного устройства и входом таймера, видеоконтрольное устройство, первый вход которого соединен с выходом цифрового фотоприемного устройства, второй вход – с выходом блока синхронизации, введены объектив дополнительного канала наблюдения, механически соединенный с горизонтальной осью вращения механизма горизонтального наведения и смещенный относительно объектива основного канала наблюдения на расстояние, достаточное для оценки дальности объекта наблюдения, связанное с ним оптически цифровое фотоприемное устройство дополнительного канала наблюдения, содержащее матрицу фоточувствительных детекторов, вход которого соединен с выходом блока синхронизации, дополнительный волоконно-оптический канал передачи данных, вход которого соединен с выходом цифрового фотоприемного устройства дополнительного канала наблюдения, электронный блок оперативного определения дальности, состоящий из интерфейса скоростного ввода данных, вход которого подсоединен к выходу дополнительного волоконно-оптического канала передачи данных, устройства измерения линейных координат, вход которого соединен с выходом интерфейса скоростного ввода данных, блока вычисления дальности, первый и второй входы которого соединены с выходами устройства измерения линейных координат, третий и четвертый входы соединены с первым и вторым выходами устройства измерения линейных координат электронного блока оперативной обработки измерительной информации, интерфейса вывода данных, выход которого соединен с третьим входом регистратора, видеоконтрольное устройство, первый вход которого соединен с выходом цифрового фотоприемного устройства дополнительного канала наблюдения, второй вход соединен с выходом блока синхронизации.
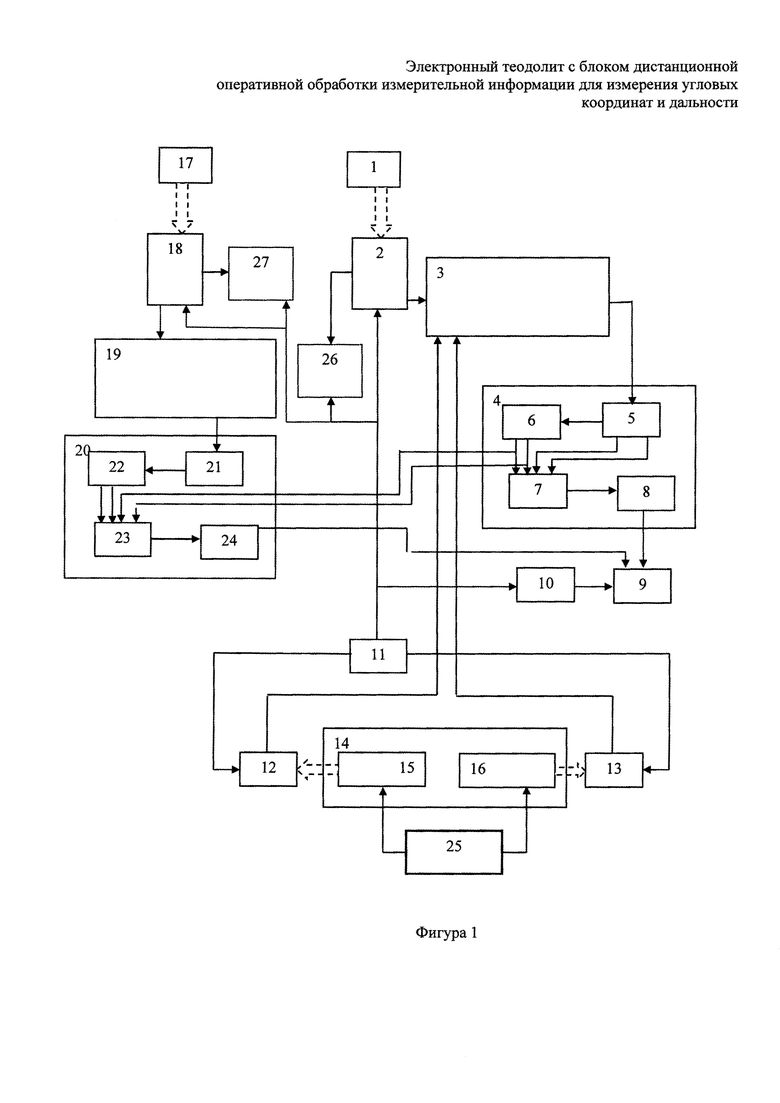
На чертеже (фигура 1) приведена функциональная схема заявляемого электронного теодолита с дистанционным блоком оперативной обработки измерительной информации.
Электронный теодолит с блоком дистанционной оперативной обработки измерительной информации для измерения угловых координат и дальности содержит
опорно-поворотное устройство (14), механизмы горизонтального (15) и вертикального (16) наведения которого соединены механически соответственно с горизонтальным (12) и вертикальным (13) углоизмерительными датчиками, объектив (1), установленный на опорно-поворотное устройство (14), и связанное с ним оптически цифровое фотоприемное устройство (2) канала наблюдения, содержащее матрицу фоточувствительных детекторов, волоконно-оптический канал передачи данных (3), первый вход которого соединен с выходом фотоприемного устройства (2), второй и третий входы которого соединены с выходами горизонтального (12) и вертикального (13) углоизмерительными датчиками соответственно, блок дистанционной оперативной обработки измерительной информации (4), содержащий интерфейс скоростного ввода данных (5), вход которого соединен с выходом волоконно-оптического канала передачи данных (3), первый выход соединен входом устройства измерения линейных координат (6), третий и четвертый выходы соединены соответственно с третьим и четвертым входами блока вычисления угловых координат (7), первый и второй входы которого соединены с первым и вторым соответственно выходами устройства измерения линейных координат (6), интерфейс вывода данных (8), вход которого подсоединен к выходу вычислителя угловых координат (7), выход подсоединен к первому входу регистратора (9), регистратор (9), первый вход которого соединен с выходом интерфейса вывода данных(8), дистанционный пульт управления (25), первый и второй выходы которого подключены к управляющим входам соответственно механизмов горизонтального (15) и вертикального наведения (16), таймер (10), выход которого соединен со вторым входом регистратора (9), блок синхронизации (11), выходы которого соединены с входом горизонтального углоизмерительного датчика (12), входом вертикального углоизмерительного датчика (13), входом цифрового фотоприемного устройства (2) и входом таймера (10), видеоконтрольное устройство (26), первый вход которого соединен с выходом цифрового фотоприемного устройства (2), второй вход – с выходом блока синхронизации (11), объектив дополнительного канала наблюдения (17), механически соединенный с горизонтальной осью вращения механизма горизонтального наведения (15) и смещенный относительно объектива (1) основного канала наблюдения на расстояние, достаточное для оценки дальности объекта наблюдения, связанное с ним оптически цифровое фотоприемное устройство (18) дополнительного канала наблюдения, содержащее матрицу фоточувствительных детекторов, вход которого соединен с выходом блока синхронизации (11), дополнительный волоконно-оптический канал передачи данных (19), вход которого соединен с выходом цифрового фотоприемного устройства дополнительного канала наблюдения (18), электронный блок оперативного определения дальности (20), состоящий из интерфейса скоростного ввода данных (21), вход которого подсоединен к выходу дополнительного волоконно-оптического канала передачи данных (19), устройства измерения линейных координат (22), вход которого соединен с выходом интерфейса скоростного ввода данных (21), блока вычисления дальности (23), первый и второй входы которого соединены с выходами устройства измерения линейных координат (22), третий и четвертый входы соединены с первым и вторым выходами устройства измерения линейных координат (6) электронного блока оперативной обработки измерительной информации (4), интерфейса вывода данных (24), выход которого соединен с третьим входом регистратора (9) видеоконтрольное устройство (27), первый вход которого соединен с выходом цифрового фотоприемного устройства (18) дополнительного канала наблюдения, второй вход соединен с выходом блока синхронизации (11).
Устройство работает следующим образом.
Измерение угловых координат осуществляется в соответствии с описанием работы электронного теодолита по патенту РФ 2437059.
Измерение дальности до объекта наблюдения осуществляется следующим образом.
Изображение объекта наблюдения – движущейся цели - проектируется через объектив 17 дополнительного канала наблюдения на матрицу фотодетекторов фотоприемного устройства 18 канала наблюдения. Считывание измерительной информации с фотоприемного устройства 18 производится периодически посредством сигналов считывания, формируемых блоком 11 синхронизации. Частота следования кадров устанавливается оператором с пульта дистанционного управления 25, для чего с третьего выхода пульта дистанционного управления 26 сигнал управления подается на вход блока синхронизации (11).
Оператор с помощью пульта дистанционного управления 25 подает сигналы управления на механизм горизонтального наведения 15 и механизм вертикального наведения 16 и перемещает объективы 1 и 18 в пространстве так, что динамический объект наблюдения попадает в поле зрения обоих объективов и удерживается в нем. Об этом оператору становится известно по изображению на видеоконтрольных устройствах 26 и 27.
С выхода цифрового фотоприемного устройства (2) и цифрового фотоприемного устройства (18) цифровые данные соответственно поступают через волоконно-оптические каналы передачи данных (5) и (19) на соответствующие интерфейсы скоростного ввода данных (11) и (21). С выхода интерфейсов (11) и (21) данные поступают соответственно на устройства измерения линейных координат (6) и (22), где определяются координаты положения изображения объекта на матрицах фоточувствительных детекторов цифровых фотоприемных устройств (2) и (18) соответственно.
Устройство измерения линейных координат (6) определяет координаты изображения объекта на матрице фоточувствительных детекторов цифрового фотоприемного устройства (2) основного канала наблюдения XОКН и YОКН.
Устройство измерения линейных координат дополнительного канала (22) определяет координаты изображения объекта на матрице фоточувствительных детекторов цифрового фотоприемного устройства дополнительного канала наблюдения (18) XДКН и YДКН.
Значения координат XОКН и YОКН подаются соответственно с первого и второго выходов устройства измерения линейных координат (6) на второй и третий входы соответственно устройства вычисления дальности (23).
Значения координат XДКН и YДКН подаются соответственно с первого и второго выходов устройства измерения линейных координат 22 на первый и второй входы соответственно устройства вычисления дальности (23).
В случае когда изображение объекта наблюдения на матрице фоточувствительных детекторов фотоприемного устройства (2) основного канала наблюдения находится вблизи фокальной точки, дальность до объекта наблюдения вычисляется по четырем данным XОКН и YОКН, XДКН и YДКН в соответствии со следующим алгоритмом:
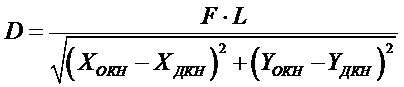
где F – фокусное расстояние однотипных объективов;
L – расстояние между оптическими осями объективов (1) и (17).
Результат вычисления записываются в регистраторе (9). Точная оценка параметров промаха осуществляется по данным измерений угловых координат двух разнесенных теодолитов [1]. Для оперативной оценки параметров промаха достаточно получить измерения линейных координат и дальности двух разнесенных теодолитов. Точность измерения дальности невысока, но достаточна для оперативного оценивания качества стрельбы.
Источники информации
1. Булычев Ю.Г., Васильев В.В., Джуган Р.В. Информационно-измерительное обеспечение натурных испытаний сложных технических комплексов. М., «Машиностроение – Полет», 2016 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ ТЕОДОЛИТ С БЛОКОМ ДИСТАНЦИОННОЙ ОПЕРАТИВНОЙ ОБРАБОТКИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2010 |
|
RU2437059C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ С ДИФФЕРЕНЦИАЛЬНОЙ И ИНТЕГРАЛЬНОЙ СЕЛЕКЦИЕЙ ПОДВИЖНЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2014 |
|
RU2561310C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343408C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343407C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК В ТРУБОПРОВОДЕ | 1994 |
|
RU2081369C1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении и предназначено для измерения наряду с угловыми координатами расстояния между теодолитом и объектом наблюдения. Сущность изобретения характеризуется тем, что в известный из уровня техники электронный теодолит с блоком дистанционной оперативной обработки измерительной информации введены новые конструктивные элементы: дополнительный канал наблюдения, включающий объектив и цифровое фотоприемное устройство, и блок вычисления дальности, обеспечивающие измерение дальности в реальном масштабе времени. Технический результат изобретения состоит в обеспечении оперативного оценивания параметров промахов при стрельбе артиллерийскими снарядами или ракетами по воздушным целям (мишеням) по измерениям дальности и линейного смещения изображения цели на матрице фоточувствительных детекторов. 1 ил.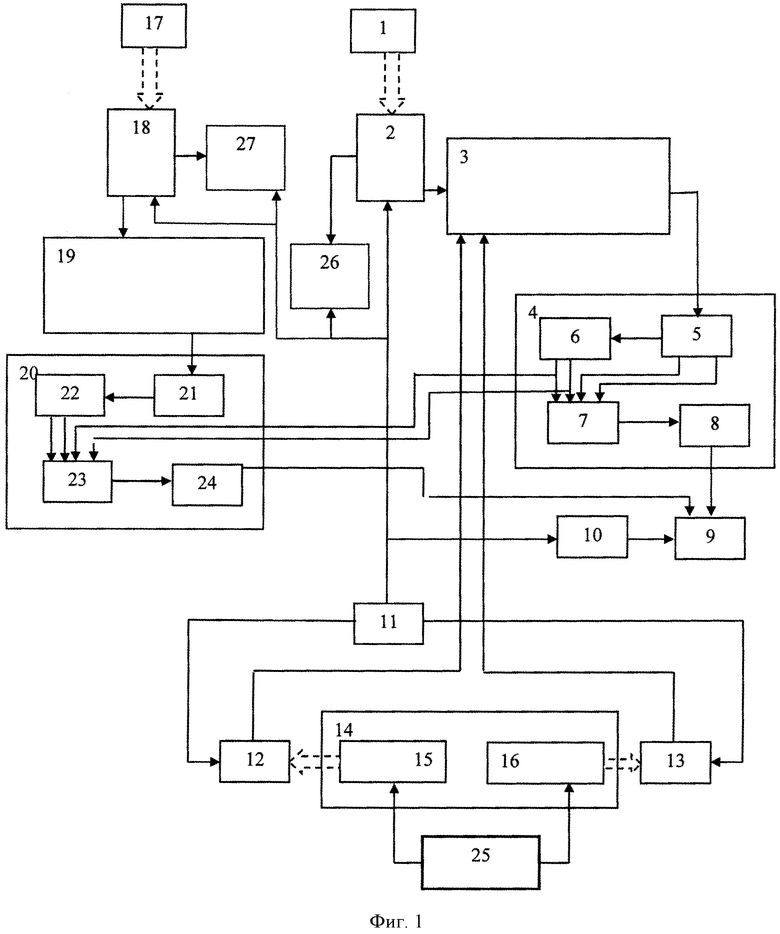
Электронный теодолит с блоком дистанционной оперативной обработки измерительной информации для измерения угловых координат и дальности, содержащий опорно-поворотное устройство, механизмы горизонтального и вертикального наведения которого соединены механически соответственно с горизонтальным и вертикальным углоизмерительными датчиками, объектив, установленный на опорно-поворотное устройство, и связанное с ним оптически цифровое фотоприемное устройство канала наблюдения, содержащее матрицу фоточувствительных детекторов, волоконно-оптический канал передачи данных, первый вход которого соединен с выходом фотоприемного устройства, второй и третий входы которого соединены с выходами горизонтального и вертикального углоизмерительного датчиков соответственно, блок дистанционной оперативной обработки измерительной информации, содержащий интерфейс скоростного ввода данных, вход которого соединен с выходом волоконно-оптического канала передачи данных, первый выход соединен входом устройства измерения линейных координат, третий и четвертый выходы соединены соответственно с третьим и четвертым входами блока вычисления угловых координат, первый и второй входы которого соединены с первым и вторым соответственно выходами устройства измерения линейных координат, интерфейс вывода данных, вход которого подсоединен к выходу вычислителя угловых координат, выход подсоединен к первому входу регистратора, регистратор, первый вход которого соединен с выходом интерфейса вывода данных, дистанционный пульт управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов горизонтального и вертикального наведения, таймер, выход которого соединен со вторым входом регистратора, блок синхронизации, выходы которого соединены с входом вертикального углоизмерительного датчика, входом горизонтального углоизмерительного датчика, входом цифрового фотоприемного устройства и входом таймера, видеоконтрольное устройство, первый вход которого соединен с выходом цифрового фотоприемного устройства, второй вход - с выходом блока синхронизации, отличающийся тем, что с целью измерения расстояния до объекта наблюдения введены объектив дополнительного канала наблюдения, механически соединенный с горизонтальной осью вращения механизма горизонтального наведения и смещенный относительно объектива основного канала наблюдения на расстояние, достаточное для оценки дальности объекта наблюдения, связанное с ним оптически цифровое фотоприемное устройство дополнительного канала наблюдения, содержащего матрицу фоточувствительных детекторов, вход которого соединен с выходом блока синхронизации, дополнительный волоконно-оптический канал передачи данных, вход которого соединен с выходом цифрового фотоприемного устройства дополнительного канала наблюдения, электронный блок оперативного определения дальности, состоящий из интерфейса скоростного ввода данных, вход которого подсоединен к выходу дополнительного волоконно-оптического канала передачи данных, устройства измерения линейных координат, вход которого соединен с выходом интерфейса скоростного ввода данных, блока вычисления дальности, первый и второй входы которого соединены с выходами устройства измерения линейных координат, третий и четвертый входы соединены с первым и вторым выходами устройства измерения линейных координат электронного блока оперативной обработки измерительной информации, интерфейса вывода данных, выход которого соединен с третьим входом регистратора, видеоконтрольное устройство, первый вход которого соединен с выходом цифрового фотоприемного устройства дополнительного канала наблюдения, второй вход соединен с выходом блока синхронизации.
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| Резьбонакатный станок для бесцентрового роликового накатывания цилиндрических деталей | 1959 |
|
SU129624A1 |
| RU 97116463 A, 10.07.1999 | |||
| US 20080297760 A1, 04.12.2008. | |||

