Область техники
Данное изобретение относится к способу, компьютерной программе и машиночитаемому носителю для отображения пространственного положения летательного аппарата. Кроме того, изобретение относится к системе отображения для отображения пространственного положения летательного аппарата.
Предпосылки создания изобретения
Есть множество вариантов предоставления пилотам и операторам визуального отображения положения летательного аппарата в пространстве.
В частности, есть две основные концепции, а именно концепция подвижный горизонт/неподвижный летательный аппарат, принимающая координаты летательного аппарата в качестве эталонной системы, и концепция подвижный летательный аппарат/неподвижный горизонт, принимающая координаты земли в качестве эталонной системы. Они упоминаются как эгоцентрический (типа "с летательный аппарата на землю") и экзоцентрический (типа "с земли на летательный аппарат") индикаторы.
Оба варианта могут использоваться в расположенных на приборной панели традиционных приборах, в многофункциональных дисплеях, в дисплее на лобовом стекле и в нашлемных дисплеях.
Эгоцентрический индикатор пространственного положения летательного аппарата использует летательный аппарат как точку обзора, так что дисплей отражает вид окружающей визуальной обстановки, кажущейся пилоту внутри кабины, который смотрит наружу, как горизонт перемещается по лобовому стеклу. Когда летательный аппарат выполняет вираж (или крен), например, отображаемый горизонт наклоняется в противоположном направлении относительно неподвижного символа летательного аппарата. При расположении отображаемого горизонта вдоль продольной оси летательного аппарата этот вид представляется подобным реальному горизонту.
Для экзоцентрического индикатора пространственного положения летательного аппарата точка обзора представляет собой наблюдателя вне летательного аппарата, который смотрит на движущийся летательный аппарат относительно неподвижного горизонта. Поэтому, когда летательный аппарат выполняет вираж, линия горизонта остается неподвижной, а символ летательного аппарата наклоняется в соответствии с входным сигналом управления.
Стандартный индикатор пространственного положения в российском летательном аппарате является экзоцентрическим, так же как в некоторых более старых летательных аппаратах западного производства. Обычно дисплей российского летательного аппарата отображает только крен экзоцентрическим способом, в то время как тангаж отображается как вид с земли на летательный аппарат. Характерной чертой всех экзоцентрических дисплеев является символ летательного аппарата, который поворачивается в соответствии с углом виража (или углом крена). В отличие от этого западные летательные аппараты используют эгоцентрические индикаторы пространственного положения.
Дальнейшей информацией, представляющей интерес для пилота или оператора, является угол атаки на основании разности между тангажом и направлением полета летательного аппарата. Индикаторы угла атаки представляют собой обычно стандартные индикаторы с круговой шкалой, показывающие угол атаки непосредственно или как отношение угла атаки к эталонному углу атаки.
Сущность изобретения
Целью изобретения является снабдить пилота или оператора летательного аппарата информацией о пространственном положении летательного аппарата, которая легко и быстро воспринимается/интерпретируется, является однозначной и адаптируемой к текущим условиям или режиму полета летательного аппарата.
Эта цель достигается объектом независимых пунктов формулы изобретения. Дальнейшие примеры осуществления очевидны из зависимых пунктов формулы изобретения и нижеследующего описания.
Аспект изобретения относится к способу отображения пространственного положения летательного аппарата. В целом, способ может (автоматически) выполняться контроллером летательного аппарата или наземной станции, связанной с летательный аппаратом.
Согласно варианту осуществления изобретения способ включает следующие шаги: прием угла крена, угла тангажа и угла рыскания летательного аппарата, например, от системы датчиков или посредством оценки данных от датчика; генерацию визуального изображения, показывающего угол крена, угол тангажа и угол рыскания, и отображение визуального изображения на устройстве отображения. Устройство отображения может быть экраном, который располагается в поле зрения пилота или оператора.
Визуальное изображение, которое может быть двумерной проекцией виртуальной (сгенерированной компьютером) сцены, содержит сферическую оболочку (например, изображаемую координатной сеткой) со шкалой путевого угла, проецируемой на сферическую оболочку по линии нулевого тангажа или искусственного горизонта сферической оболочки, и со шкалой угла тангажа, проецируемой на сферическую оболочку по линии долготы сферической оболочки (линии меридиана, расположенной под углом рыскания летательного аппарата относительно шкалы путевого угла). Например, сферическая оболочка может быть полушарием и/или может иметь верхнюю часть и нижнюю часть, которые могут быть по-разному окрашены и которые могут быть разделены искусственным горизонтом.
Визуальное изображение также включает графический индикатор пространственного положения летательного аппарата внутри сферической оболочки, вращающийся относительно сферической оболочки так, что графический индикатор пространственного положения летательного аппарата показывает угол крена, угол тангажа и угол рыскания относительно сферической оболочки. Графический индикатор пространственного положения летательного аппарата может быть основан на виртуальных графических элементах, которые приспособлены для индикации пространственного положения летательного аппарата, таких как линия, показывающая направление оси крена, и/или линия, показывающая направление оси тангажа, в сферической оболочке. Эти оси могут определяться вращающейся системой координат относительно системы координат, определяемой сферической оболочкой.
Пилоту или оператору летательного аппарата достаточно только рассматривать визуальное изображение, чтобы собирать большое количество полезной информации о пространственном положении летательного аппарата. Сферическая оболочка визуализирует окружающую среду летательного аппарата, а графический индикатор пространственного положения летательного аппарата визуализирует ориентацию летательного аппарата относительно его окружающей среды. Пилоту или оператору не требуется обращаться к другому устройству или датчику и возможность неверного истолкования ориентации летательного аппарата значительно понижается.
Визуальное изображение вообще позволяет интуитивно интерпретировать пространственное положение летательного аппарата, особенно в ситуациях, называемых "необычным пространственным положением", которые могут потребовать немедленного информирования пилота или оператора и последующих маневров с целью восстановления нормального положения. Визуальное изображение может быть особенно полезно для индикации пространственного положения при длительном нахождении в большом тангаже.
Согласно варианту осуществления изобретения графический индикатор пространственного положения летательного аппарата содержит графический индикатор угла тангажа и графический индикатор угла крена. Например, графический индикатор угла тангажа показывает точку на сферической оболочке с углом тангажа, смещенную соответственно углом рыскания (если используется). Эта точка может быть показана на сферической оболочке окружностью, окружающей точку. Индикатор угла тангажа может содержать стрелку, показывающую на точку из центра сферической оболочки. Индикатор угла тангажа может быть основан на линии, которая начинается в центре сферической оболочки, продолжает продольную ось летательного аппарата и заканчивается в точке на сферической оболочке, соответствующей углу рыскания и углу тангажа.
Согласно варианту осуществления изобретения графический индикатор угла крена показывает угол крена линией по оси тангажа, определяемой системой координат индикатора пространственного положения летательного аппарата, поворачиваемой соответственно углу крена, углу тангажа и углу рыскания. Линия индикатора угла крена может пересекать центр сферической оболочки. Так как линия индикатора угла крена вращается относительно сферической оболочки (которая имеет определенную ориентацию относительно устройства отображения), визуальное изображение может рассматриваться как тип перспективного экзоцентрического индикатора пространственного положения, как описано выше.
Согласно варианту осуществления изобретения графический индикатор пространственного положения летательного аппарата содержит трехмерную (виртуальную) модель летательного аппарата, расположенную в центре сферической оболочки и вращающуюся относительно сферической оболочки так, что трехмерная модель летательного аппарата имеет угол крена, угол тангажа и угол рыскания летательного аппарата относительно сферической оболочки. Таким путем пространственное положение (реального) летательного аппарата показывается в перспективе посредством использования сферической оболочки и трехмерной модели летательного аппарата.
Графический индикатор пространственного положения летательного аппарата может содержать схематическую, символическую или реалистичную трехмерную модель летательного аппарата, расположенную в центре сферической оболочки, чтобы визуализировать пространственное положение летательного аппарата. По сравнению с современными экзоцентрическими индикаторами пространственного положения, это создает перспективную индикацию пространственного положения, для которой азимут и угол возвышения могут адаптироваться статически к некоторой задаче или этапу полета, но также могут изменяться динамически в зависимости от режима полета летательного аппарата.
Стрелка и/или линия индикатора угла тангажа может перемещаться по оси крена вращающейся трехмерной модели летательного аппарата. Линия индикатора угла крена может перемещаться по оси тангажа вращающейся трехмерной модели летательного аппарата.
Согласно варианту осуществления изобретения получают вектор направления полета летательного аппарата, который также может быть определен из данных датчика летательного аппарата. Визуальное изображение содержит графический индикатор вектора направления полета, показывающий точку на сферической оболочке, соответствующую вектору направления полета. Например, индикатор вектора направления полета может содержать окружность вокруг этой точки. Так как разность между углом направления полета, определяемым вектором направления полета, и углом тангажа является углом атаки летательного аппарата, угол атаки также может визуализироваться изображением на дисплее.
Согласно варианту осуществления изобретения способ также включает следующие шаги: выбор перспективы виртуальной камеры для генерации визуального изображения; генерацию визуального изображения (и, в частности, сферической оболочки и индикатора пространственного положения летательного аппарата и/или трехмерной модели летательного аппарата) в соответствии с выбранной перспективой виртуальной камеры. Визуальное изображение может быть двумерной проекцией виртуальных трехмерных объектов, таких как модель сферической оболочки и модель летательного аппарата. Эта двумерная проекция может генерироваться посредством виртуальной камеры, которая определяет точку обзора для проекции. Перспектива виртуальной камеры, которая используется для обновления визуального изображения, может быть регулируемой. В частности, перспектива виртуальной камеры может изменяться в реальном масштабе времени, то есть во время полета летательного аппарата.
Согласно варианту осуществления изобретения перспектива виртуальной камеры выбирается оператором или пилотом летательного аппарата посредством ввода команды в орган управления. Другими словами, перспектива визуального изображения может изменяться командами оператора.
Согласно варианту осуществления изобретения перспектива виртуальной камеры выбирается автоматически в зависимости от пространственного положения или других параметров режима полета летательного аппарата. Также возможно перемещение перспективы визуального изображения на основании решений контроллера. Например, перспектива виртуальной камеры может перемещаться в позицию ниже центра сферической оболочки, когда угол тангажа превышает заранее заданное значение.
Согласно варианту осуществления изобретения визуальное изображение содержит индикатор зенита и/или надира, показывающий зенит и/или надир сферической оболочки относительно шкалы угла тангажа. Например, индикатор зенита и/или надира содержит символ и/или окружность, помещенную в зените сферической оболочки.
Согласно варианту осуществления изобретения визуальное изображение содержит по меньшей мере один датчик со шкалой, изогнутой вокруг части границы сферической оболочки. Примерами таких датчиков являются датчик воздушной скорости, датчик высоты и вертикальной скорости и датчик угла крена.
Согласно варианту осуществления изобретения способ также включает следующие шаги: получение данных о пространственном положении летательного аппарата системой датчиков, приспособленной для измерения пространственного положения летательного аппарата; определение угла крена, угла тангажа и угла рыскания из данных о пространственном положении летательного аппарата и, опционально, изменение или эволюцию этих значений через конкретное время. Система датчиков может содержать датчики, которые расположены внутри и/или снаружи летательного аппарата. Например, некоторые из этих датчиков могут быть телеметрическим оборудованием, расположенным в наземной станции для управления летательным аппаратом.
Еще один аспект изобретения относится к компьютерной программе для отображения пространственного положения летательного аппарата, которая, когда выполняется процессором, приспособлена для осуществления шагов способа, как описано выше и ниже. Например, система для управления летательным аппаратом или наземная станция, связанная с летательный аппаратом, могут содержать такой процессор.
Еще один аспект изобретения относится к машиночитаемому носителю, на котором хранится упомянутая компьютерная программа. Машиночитаемый носитель может быть энергонезависимым носителем, таким как гибкий диск, жесткий диск, запоминающее устройство для универсальной последовательной шины (Universal Serial Bus, USB), оперативная память (Random Access Memory, RAM), постоянное запоминающее устройство (Read Only Memory, ROM), стираемое перепрограммируемое постоянное запоминающее устройство (Erasable Programmable Read Only Memory, EPROM) или флэш-память. Машиночитаемый носитель также может быть энергозависимым носителем, таким как система передачи данных, например сеть Интернет, которая позволяет загружать код программы.
Еще один аспект изобретения относиться к системе отображения для отображения пространственного положения летательного аппарата. Система отображения может содержать контроллер для реализации способа, как описано выше и ниже, и устройство отображения для отображения визуального изображения.
Еще один аспект изобретения относится к летательному аппарату, который содержит упомянутую систему отображения и кабину с устройством отображения. Например, летательный аппарат может быть самолетом, вертолетом, или космическим кораблем. Система отображения может применяться, например, для обнаружения признаков приближения к сваливанию в коммерческом летательном аппарате, или для контроля маневров в режиме зависания в вертолетах. Летательный аппарат также может быть боевым летательный аппаратом.
Еще один аспект изобретения относится к наземной станции, содержащей упомянутую систему отображения, причем наземная станция приспособлена для наблюдения за летательным аппаратом и/или для управления им. Летательный аппарат может быть беспилотным летательным аппаратом, ракетой или крылатой ракетой. Вообще, летательный аппарат может быть суборбитальным летательный аппаратом с ракетным двигателем или орбитальным космическим кораблем, который приспособлен, для поддержания положения большого тангажа, которое может контролироваться и/или управляться системой отображения, как здесь описано. Способ и система позволяют контролировать направление полета более интуитивным образом благодаря регулируемым экзоцентрическим перспективам, которые могут адаптироваться к соответствующим этапам полета.
Способ отображения и система отображения могут использоваться для восстановления нормального положения на любом летательный аппарате; суборбитальных космопланах с длительными положениями большого тангажа во время этапа полета с ракетным двигателем и баллистического этапа; летательном аппарате, обычно выполняющем маневры в режиме сваливания, продолжительном режиме сваливания и после сваливания; боевом и спортивно-пилотажном летательном аппарате, способном к полету с большими углами атаки; боевом летательном аппарате, оборудованном устройством изменения вектора тяги; и для интуитивной индикации угла атаки с целью обнаружения сваливания, особенно в коммерческом летательном аппарате. Следует понимать, что особенности способа, как описано выше и ниже, могут быть особенностями компьютерной программы, машиночитаемого носителя и системы отображения и наоборот.
Эти и другие аспекты изобретения будут подробно описаны ниже, со ссылками на варианты осуществления изобретения.
Краткое описание чертежей
Ниже варианты осуществления данного изобретения описываются более подробно со ссылкой на сопроводительные чертежи.
На фиг. 1 схематично показана система отображения согласно варианту осуществления изобретения.
На фиг. 2 показано визуальное изображение системы отображения согласно варианту осуществления изобретения.
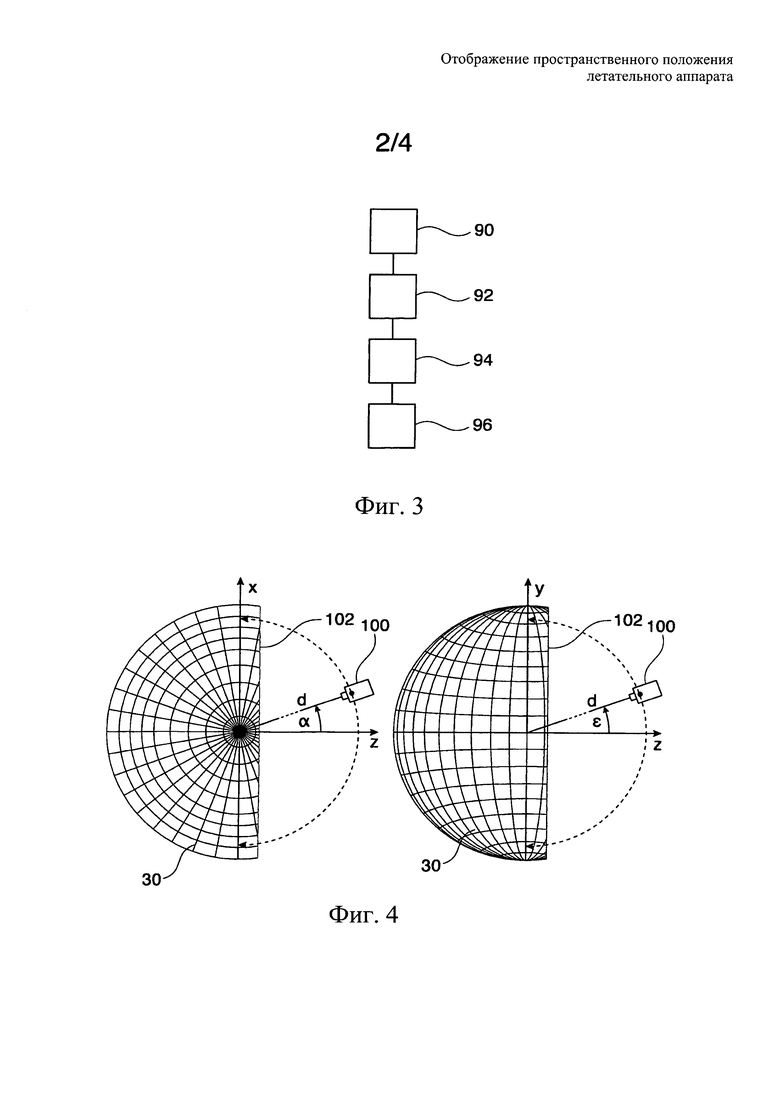
На фиг. 3 показана блок-схема алгоритма способа отображения пространственного положения летательного аппарата согласно варианту осуществления изобретения.
На фиг. 4 схематично показано расположение виртуальной камеры для системы отображения согласно варианту осуществления изобретения.
На фиг. 5 показано другое визуальное изображение системы отображения согласно варианту осуществления изобретения.
На фиг. 6 схематично показан пилотируемый летательный аппарат согласно варианту осуществления изобретения.
На фиг. 7 схематично показан беспилотный летательный аппарат с наземной станцией согласно варианту осуществления изобретения.
Как правило, на фигурах идентичные части обозначаются одинаковыми ссылочными позициями.
Подробное описание изобретения
На фиг. 1 схематично показана система 10 отображения, содержащая устройство 12 отображения для отображения визуального изображения 14, контроллер 16 для генерации визуального изображения 14, систему 18 датчиков для получения данных о пространственном положении летательного аппарата 20 (см. фиг. 6 и 7) и орган управления 22 для приема входных сигналов от оператора или пилота летательного аппарата.
Устройство 12 отображения может содержать экран, который приспособлен для отображения сгенерированного компьютером изображения, подобного визуальному изображению 14. Контроллер 16 может содержать компьютер и может быть приспособлен для выполнения компьютерной программы, которая генерирует визуальное изображение 14 или выполняет его обновление на основании данных с датчиков от системы 18 датчиков и входных сигналов или команд от органа управления 22, который может быть клавиатурой или может содержать кнопки или ручки управления. В частности, контроллер 16 получает или определяет угол крена, угол тангажа и угол рыскания летательного аппарата 20 и генерирует визуальное изображение 14 на основании этих параметров пространственного положения в полете.
Следует отметить, что компоненты 12, 16, 18, 22 системы 10 отображения не обязательно должны находиться в одном корпусе и могут быть расположены удаленно друг от друга. Однако все компоненты 12, 16, 18, 22 могут быть частью летательного аппарата 20.
На фиг. 2 показано визуальное изображение 14, которое может отображаться на устройстве 12 отображения.
Визуальное изображение 14 содержит сферическую оболочку 30 в форме полушария, визуализируемую координатной сеткой 32, которая может быть приспособлена к текущей задаче пилота. Координатная сетка 32 имеет линии 34 широты и линии 36 долготы. Сферическая оболочка 30 имеет верхнюю часть 38 и нижнюю часть 40, которые разделяются линией 42 горизонта (которая является линией широты с тангажом 0°). Верхняя часть 38 и нижняя часть 40 могут быть окрашены по-разному. Например, сферическая оболочка 30 может быть окрашена в синий цвет над коричневым подобно любому обычному искусственному горизонту.
Сферическая оболочка 30 содержит шкалу 44 курсового/путевого угла, показанную на сферической оболочке 30 по линии 42 горизонта, и шкалу 46 угла тангажа, показанную на сферической оболочке 30 по линии 36 долготы в соответствии с курсовым/путевым углом летательного аппарата 20. Шкала 46 угла тангажа может содержать вертикальную шкалу угла тангажа, наложенную на сферическую оболочку 30.
Кроме того, визуальное изображение 14 содержит также графический индикатор 48 пространственного положения летательного аппарата внутри сферической оболочки 30, который вращается относительно сферической оболочки 30 посредством угла крена, угла тангажа и угла рыскания летательного аппарата 20.
Графический индикатор 48 пространственного положения летательного аппарата содержит схематическую/символическую или реалистичную трехмерную модель 50 летательного аппарата 20, которая помещена в центре сферической оболочки 30 и поворачивается соответственно углу крена, углу тангажа и углу рыскания, чтобы визуализировать пространственное положение летательного аппарата.
Графический индикатор 48 пространственного положения летательного аппарата содержит графический индикатор 50 угла тангажа, который содержит стрелку и/или линию 52, проходящую от носовой части трехмерной модели 50 летательного аппарата по оси крена модели 50 летательного аппарата, и служит эталонным углом тангажа. Конец стрелки 52 показывает точку 54 на сферической оболочке 30, соответствующую курсовому углу и углу тангажа.
Дополнительно, графический индикатор 48 пространственного положения летательного аппарата содержит графический индикатор 56 угла крена или угла виража. Индикатор 56 угла крена содержит линию или луч 58, который проходит от центра тяжести модели 50 летательного аппарата по оси тангажа модели 50 летательного аппарата. Координатная сетка 32 внутри сферической оболочки 30 может служить эталонным углом крена.
Графический индикатор 48 пространственного положения летательного аппарата с моделью 50 летательного аппарата и сферической оболочкой 30 окружен ленточными шкалами или датчиками для воздушной скорости 60 (слева), высоты 62 (справа), вертикальной скорости 64 (справа) и угла крена 66 (сверху). На датчик 60 воздушной скорости и датчик высоты 62 наложены окна 68, 70 с цифровым отсчетом, показывающие фактическое численное значение воздушной скорости и высоты, соответственно. Окно 72 с цифровым отсчетом, показывающее численное значение курсового/путевого угла, расположено снизу сферической оболочки 30.
На фиг. 3 показана блок-схема алгоритма способа отображения визуального изображения 14, который может реализовываться системой 10 отображения.
На шаге 90 система 18 датчиков получает данные от датчиков, относящиеся к пространственному положению, местоположению и скорости летательного аппарата 20, которые, например, могут генерироваться датчиком пространственного положения в летательном аппарате 20, датчиком глобальной системы определения местоположения (Global Positioning System, GPS), датчиком воздушной скорости, а также датчиком местоположения (подобным лазерному датчику или радарному датчику), который может быть расположен снаружи летательного аппарата 20.
На шаге 92 контроллер 16 определяет угол крена, угол тангажа и угол рыскания на основании данных о пространственном положении летательного аппарата. Дополнительно на этом шаге также могут определяться дальнейшие параметры подобные вектору направления полета, путевой линии, путевой скорости, скорости летательного аппарата и высоте летательного аппарата 20.
На шаге 94 пилот/оператор летательного аппарата 20 и/или сам контроллер 16 может выбирать или изменять перспективу виртуальной камеры для генерации визуального изображения. На этом шаге сферическая оболочка 30 может перемещаться вокруг своего центра так, что определенные особенности визуального изображения 14 могут быть видны наилучшим образом. Например, пилот/оператор летательного аппарата 20 может вводить команды в орган управления 22, чтобы изменять перспективу. Также контроллер 16 может изменять перспективу, когда достигаются определенные условия, например, когда угол тангажа выше или ниже определенного порогового значения.
Перспектива, взятая для визуального изображения 14 на фиг. 2, находится непосредственно сзади модели 50 летательного аппарата, что может создавать определенную степень подобия со стандартной экзоцентрической индикацией пространственного положения.
На фиг. 4 показана виртуальная камера 100, используемая для обновления визуального изображения 14, которая может свободно располагаться под определенными углами азимута (α) и возвышения (ε), эти углы могут регулироваться, например, в интервале от -90° до +90°.
Расстояние d виртуальной камеры 100 от центра сферической оболочки 30 и другие параметры камеры могут регулироваться, чтобы получать различные фокусные расстояния и изменять поле обзора. Всякий раз, когда виртуальная камера 100 поворачивается, секущая плоскость 102, определяющая сферическую оболочку 30, может поворачиваться на тот же угол азимута и угол возвышения, чтобы гарантировать, что видимая область сферической оболочки останется постоянной. На фиг. 4 это не показано.
Возвращаясь к фиг. 3, на шаге 96 визуальное изображение 14 генерируется относительно фактической перспективы виртуальной камеры контроллером 16 и отображается на устройстве 12 отображения.
На фиг. 5 показано визуальное изображение 14 с перспективой камеры, отличной от фиг. 2, которое было сгенерировано с углом возвышения камеры ε=-20° и углом азимута α=25°. По сравнению с фиг. 2 окно обзора сдвинулось вниз и вправо. Это делает возможным незатененный вид шкалы 46 угла тангажа и графического индикатора 104 вектора направления полета, показанного здесь как символ "птичьего" типа на сферической оболочке 30. Угол атаки летательного аппарата 20, определяемый как разность между углом направления полета и углом тангажа, таким образом, станет непосредственно видимым.
Кроме того, сдвиг вниз позиции камеры позволяет лучше наблюдать положение большого тангажа, с которым сталкивается, например, суборбитальный летательный аппарат в течение почти вертикального подъема с ракетным двигателем или последующего баллистического выведения.
Индикатор зенита 106 (здесь имеющий форму звездообразного символа) может использоваться наряду с поддерживающими кольцами, чтобы управлять направлением полета или контролировать его на этом этапе.
Азимут и угол возвышения, создающие перспективу, могут адаптироваться статически к конкретной задаче или этапу полета, но также могут изменяться динамически в зависимости от режима полета летательного аппарата. В случае суборбитального летательного аппарата, может быть предусмотрено, что сдвиг вниз перспективы, как показано на фиг. 5, может быть связан, например, с ускорением или вертикальной скоростью (или соответствующими режимами). Аэронавигационные этапы полета могут тогда проводиться с перспективой наблюдения, которая показана на фиг. 2, в то время как подъем к космосу и спуск из космоса может выполняться с перспективой наблюдения, сдвинутой вверх или вниз на соответствующих этапах полета, как показано на фиг. 5, таким образом, позволяя осуществлять более детальный контроль режима тангажа и вектора направления полета, представляющих интерес.
На фиг. 6 показан летательный аппарат 20 в форме самолета, который полностью вмещает систему 10 отображения, как показано на фиг. 1. Устройство 12 отображения может быть расположено в кабине 110 летательного аппарата 20.
На фиг. 7 показана система, содержащая беспилотный летательный аппарат 20 в виде ракеты, управляемой наземной станцией 112, которая может вмещать устройство 12 отображения, контроллер 16 и орган управления 22. Система 18 датчиков может быть частью летательного аппарата 20, который связан с наземной станцией 112 посредством системы беспроводной передачи данных.
Хотя изобретение было проиллюстрировано и описано подробно на чертежах и в предшествующем описании, такую иллюстрацию и описание нужно рассматривать в качестве примера, а не ограничения; при этом изобретение не ограничено раскрытыми вариантами его осуществления. Другие разновидности раскрытых вариантов осуществления изобретения могут быть поняты и реализованы специалистами в данной области техники и осуществлены на практике заявленным изобретением, из изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово "включающее/содержащее" не исключает другие элементы или шаги, а единственное число не исключает множественное число. Одиночный процессор или контроллер либо другой блок могут выполнять функции нескольких элементов, описанных в формуле изобретения. Факт того, что некоторые признаки описаны в различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может использоваться для достижения преимущества. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ АВИАГОРИЗОНТ | 2017 |
|
RU2664789C1 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ПРИБОР ЛОГИЧЕСКОЙ ИНДИКАЦИИ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ В ПРОСТРАНСТВЕ (ВАРИАНТЫ) | 2006 |
|
RU2331848C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ОТОБРАЖЕНИЯ ПАРАМЕТРОВ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2374146C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ ОТОБРАЖЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ, СВЯЗАННОЙ С ПАРАМЕТРАМИ ПОЛЕТА, ДЛЯ ОПЕРАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2613653C2 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |



Изобретение относится к области навигационного приборостроения и может найти применение в системах визуализации пространственного положения летательного аппарата. Технический результат – расширение функциональных возможностей. Для этого осуществляют прием угла крена, угла тангажа и угла рыскания летательного аппарата (20); генерацию визуального изображения (14), показывающего угол крена, угол тангажа и угол рыскания; и отображение визуального изображения (14) на устройстве (12) отображения. Визуальное изображение (14) содержит сферическую оболочку (30) со шкалой (44) путевого угла, проецируемой на сферическую оболочку (30) по линии (42) широты сферической оболочки (30), и со шкалой (46) угла тангажа, проецируемой на сферическую оболочку (30) по линии (36) долготы сферической оболочки. Кроме того, визуальное изображение (14) содержит графический индикатор (48) пространственного положения летательного аппарата внутри сферической оболочки (30), вращающийся относительно сферической оболочки (30) так, что графический индикатор (48) пространственного положения летательного аппарата показывает угол крена, угол тангажа и угол рыскания летательного аппарата (20) относительно сферической оболочки (30). 5 н. и 7 з.п. ф-лы, 7 ил.
1. Способ отображения пространственного положения летательного аппарата (20), включающий:
прием угла крена, угла тангажа и угла рыскания летательного аппарата (20);
генерацию визуального изображения (14), показывающего угол крена, угол тангажа и угол рыскания;
отображение визуального изображения (14) на устройстве (12) отображения;
причем визуальное изображение (14) содержит:
сферическую оболочку (30) со шкалой (44) путевого угла, проецируемой на сферическую оболочку (30) по линии (42) широты сферической оболочки (30), и со шкалой (46) угла тангажа, проецируемой на сферическую оболочку (30) по линии (36) долготы сферической оболочки;
графический индикатор (48) пространственного положения летательного аппарата внутри сферической оболочки (30), вращающийся относительно сферической оболочки (30) так, что графический индикатор (48) пространственного положения летательного аппарата показывает угол крена, угол тангажа и угол рыскания летательного аппарата (20) относительно сферической оболочки (30);
при этом графический индикатор (48) пространственного положения летательного аппарата содержит графический индикатор (52) угла тангажа и графический индикатор (56) угла крена;
причем графический индикатор (52) угла тангажа показывает точку (54) на сферической оболочке (30) с углом тангажа и с путевым углом, соответствующими шкале угла тангажа и шкале путевого угла;
причем графический индикатор (56) угла крена показывает угол крена линией (58) по оси тангажа, определяемой системой координат графического индикатора (48) пространственного положения летательного аппарата, поворачиваемой соответственно углу крена, углу тангажа и углу рыскания.
2. Способ по п. 1,
в котором графический индикатор (48) пространственного положения летательного аппарата содержит трехмерную модель (50) летательного аппарата, расположенную в центре сферической оболочки (30) и вращающуюся относительно сферической оболочки (30) так, что трехмерная модель (50) летательного аппарата имеет угол крена, угол тангажа и угол рыскания летательного аппарата относительно сферической оболочки (30).
3. Способ по п. 1 или 2,
в котором получают направление полета летательного аппарата;
причем визуальное изображение (14) содержит графический индикатор (104) направления полета, показывающий точку на сферической оболочке (30), соответствующую направлению полета.
4. Способ по п. 1 или 2, также включающий:
выбор перспективы (100) виртуальной камеры для генерации визуального изображения (14);
генерацию визуального изображения (14) в соответствии с выбранной перспективой виртуальной камеры.
5. Способ по п. 4,
в котором перспективу (100) виртуальной камеры выбирает оператор летательного аппарата посредством ввода команды в орган управления (22).
6. Способ по п. 4,
в котором перспективу (100) виртуальной камеры выбирают автоматически в зависимости от режима полета летательного аппарата (20).
7. Способ по п. 1 или 2,
в котором визуальное изображение (14) содержит по меньшей мере один датчик (60, 62, 64, 66) со шкалой, изогнутой вокруг части границы сферической оболочки (30).
8. Способ по п. 1 или 2, также включающий:
получение данных о пространственном положении летательного аппарата посредством системы (18) датчиков, приспособленной для измерения пространственного положения летательного аппарата (20);
определение угла крена, угла тангажа и угла рыскания из данных о пространственном положении летательного аппарата.
9. Машиночитаемый носитель, в котором хранится компьютерная программа для отображения пространственного положения летательного аппарата (20), которая, когда выполняется процессором, приспособлена для реализации способа по любому из пп. 1-8.
10. Система (10) отображения для отображения пространственного положения летательного аппарата,
содержащая контроллер (16) для реализации способа по любому из пп. 1-8 и устройство (12) отображения для отображения визуального изображения (14).
11. Летательный аппарат (20), содержащий систему (10) отображения по п. 10 и кабину (110) с устройством (12) отображения.
12. Наземная станция (112), содержащая систему (10) отображения по п. 10, причем наземная станция приспособлена для контроля летательного аппарата (20) и/или для управления летательным аппаратом (20).
| ЦЕНТРАТОР ДЛЯ ГИДРОПЕСКОСТРУЙНОГО ПЕРФОРАТОРА | 2011 |
|
RU2466264C1 |
| US 5181028 A1, 19.01.1993 | |||
| US 7286911 В2, 23.10.2007 | |||
| US 20090295602 А1, 03.12.2009 | |||
| US 20160272336 А1, 22.09.2016 | |||
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |

