[001] Эта заявка основана на и испрашивает приоритет китайской патентной заявки №201510627152.9, поданной 28 сентября 2015 года, полное содержание которой включается в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[002] Настоящее изобретение относится к области автоматического управления, в частности к способу и устройству управления двухколесной тележкой с противовесом.
УРОВЕНЬ ТЕХНИКИ
[003] Тележка с противовесом также известна как электрическая тележка с противовесом и сейчас является новым типом средств передвижения на коротких расстояниях.
[004] Тележка с противовесом приводится в движения внутренним приводным двигателем для движения вперед и назад. Если существует препятствие впереди тележки с противовесом, водитель может упасть.
СУЩНОСТЬ
[005] Данное описание сущности изобретения предназначено для того, чтобы в упрощенной форме изложить выбор концепций, которые далее описаны в подробном описании. Это описание не предназначено для выявления ключевых признаков или основных признаков заявленного объекта изобретения, а также не для определения объема заявленного объекта изобретения.
[006] Предлагаемый в настоящем изобретении способ управления двухколесной тележкой с противовесом нацелен на устранение проблем, существующих в уровне техники. Техническое решение состоит в следующем.
[007] Согласно первому объекту осуществления настоящего изобретения предлагается способ управления тележкой с противовесом, который заключается в том, что:
[008] выявляют тип препятствия впереди тележки с противовесом, включая непреодолимое препятствие;
[009] если препятствие относится к типу непреодолимое препятствие, управляют тележкой с противовесом для торможения.
[0010] В другом частном случае препятствие относится к типу преодолимое препятствие,
[0011] способ заключается в том, что:
[0012] если препятствие относится к типу преодолимое препятствие, увеличивают силу тяги для продолжения движения тележки с противовесом.
[0013] В другом частном случае выявление типа препятствия впереди тележки с противовесом заключается в том, что:
[0014] измеряют высоту препятствия впереди тележки с противовесом с помощью компонента измерения расстояний;
[0015] определяют, больше ли высота препятствия, чем заданное пороговое значение;
[0016] если высота препятствия больше, чем заданное пороговое значение, относят препятствие к типу непреодолимое препятствие.
[0017] В другом частном случае выявление типа препятствия впереди тележки с противовесом заключается в том, что:
[0018] получают кадр изображения впереди тележки с противовесом с помощью компонента получения изображений;
[0019] выявляют препятствие на кадре изображения;
[0020] вычисляют высоту выявленного препятствия;
[0021] определяют, больше ли высота препятствия, чем заданное пороговое значение;
[0022] если высота препятствия больше, чем заданное пороговое значение, относят препятствие к типу непреодолимое препятствие.
[0023] В другом варианте, способ дополнительно заключается в том, что:
[0024] измеряют расстояние между препятствием и тележкой с противовесом;
[0025] обнаруживают меньше ли расстояние, чем заданное расстояние;
[0026] если расстояние меньше, чем заданное расстояние, выполняют шаг управления тележкой с противовесом для торможения.
[0027] В другом частном случае способ характеризуется тем, что:
[0028] если препятствие относится к типу непреодолимое препятствие, происходит оповещение о подсказке в заданном режиме;
[0029] причем заданный режим включает, по меньшей мере, одну звуковую сигнализацию в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
[0030] В другом частном случае способ характеризуется тем, что:
[0031] если препятствие относится к типу непреодолимое препятствие, оценивают, существует ли альтернативный путь впереди тележки с противовесом;
[0032] если существует альтернативный путь тележки с противовесом, управляют тележкой с противовесом для движения по альтернативному пути;
[0033] если не существует альтернативного пути впереди тележки с противовесом, выполняют шаг управления тележки с противовесом для торможения.
[0034] Согласно второму объекту осуществления настоящего изобретения предлагается устройство управления тележкой с противовесом, которое включает:
[0035] выявляющий модуль, выполненный с возможностью выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие;
[0036] первый управляющий модуль, выполненный с возможностью управления тележкой с противовесом для торможения, когда препятствие относится к типу непреодолимое препятствие.
[0037] В другом частном случае, когда препятствие относится к типу преодолимое препятствие;
[0038] устройство дополнительно включает;
[0039] второй управляющий модуль, выполненный с возможностью увеличения силы тяги тележки с противовесом для продолжения движения, когда препятствие относится к типу преодолимое препятствие.
[0040] В другом варианте, выявляющий модуль включает:
[0041] первый измеряющий субмодуль, выполненный с возможностью измерения высоты препятствия впереди тележки с противовесом с помощью компонента измерения расстояний;
[0042] первый определяющий субмодуль, выполненный с возможностью определения того, больше ли высота препятствия, чем заданное пороговое значение;
[0043] первый выявляющий субмодуль, выполненный с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
[0044] В другом частном случае выявляющий модуль включает:
[0045] получающий субмодуль, выполненный с возможностью получения кадра изображения впереди тележки с противовесом с помощью компонента получения изображений;
[0046] второй выявляющий субмодуль, выполненный с возможностью выявления препятствия в кадре изображения;
[0047] вычисляющий субмодуль, выполненный с возможностью вычисления высоты выявленного препятствия;
[0048] второй определяющий субмодуль, выполненный с возможностью определения, больше ли высота препятствия, чем заданное пороговое значение;
[0049] третий выявляющий субмодуль, выполненный с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
[0050] В частном случае первый управляющий модуль дополнительно включает:
[0051] второй измеряющий субмодуль, выполненный с возможностью измерения расстояния между препятствием и тележкой с противовесом;
[0052] третий определяющий субмодуль, выполненный с возможностью определения, меньше ли расстояние, чем заданное расстояние;
[0053] первый выполняющий субмодуль, выполненный с возможностью выполнения управления тележкой с противовесом для торможения, когда расстояние меньше, чем заданное пороговое значение.
[0054] В частном случае первый управляющий модуль дополнительно включает:
[0055] модуль оповещения, выполненный с возможностью оповещения о препятствии в заданном режиме, когда препятствие относится к типу непреодолимое препятствие;
[0056] причем заданный режим оповещения включает, по меньшей мере, одну звуковую сигнализацию в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
[0057] В частном случае устройство дополнительно включает:
[0058] оценивающий субмодуль, выполненный с возможностью оценки, существует ли альтернативный путь впереди тележки с противовесом, когда препятствие относится к типу неодолимое препятствие;
[0059] третий управляющий субмодуль, выполненный с возможностью управления тележкой с противовесом для движения по альтернативному пути, когда альтернативный путь существует впереди тележки с противовесом;
[0060] первый управляющий модуль, выполненный с возможностью контролирования тележки с противовесом для торможения, когда не существует альтернативного пути впереди тележки с противовесом.
[0061] Согласно третьему объекту осуществления настоящего изобретения, предлагается тележка с противовесом, включающая:
[0062] чип управления;
[0063] память для хранения инструкций, исполняемых чипом управления;
[0064] причем чип управления выполнен с возможностью:
[0065] выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие;
[0066] управления тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие,
[0067] Предложенные варианты осуществления заявленного технического решения включают следующие положительные эффекты:
[0068] выявляют тип препятствия впереди тележки с противовесом, включая непреодолимое препятствие; если препятствие относится к типу непреодолимое препятствие, управляют тележкой с противовесом для торможения, что исключает вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом; кроме того, при автоматическом выявлении тележкой с противовесом препятствия, она работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие относится к типу непреодолимым препятствием.
[0069] Следует понимать, что, как вышеизложенное краткое описание, так и нижеследующее подробное описание, являются примерными и пояснительными и не ограничивают объем охраны изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0070] Прилагаемые чертежи, которые включены в и составляют часть настоящего описания, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для пояснения его сущности.
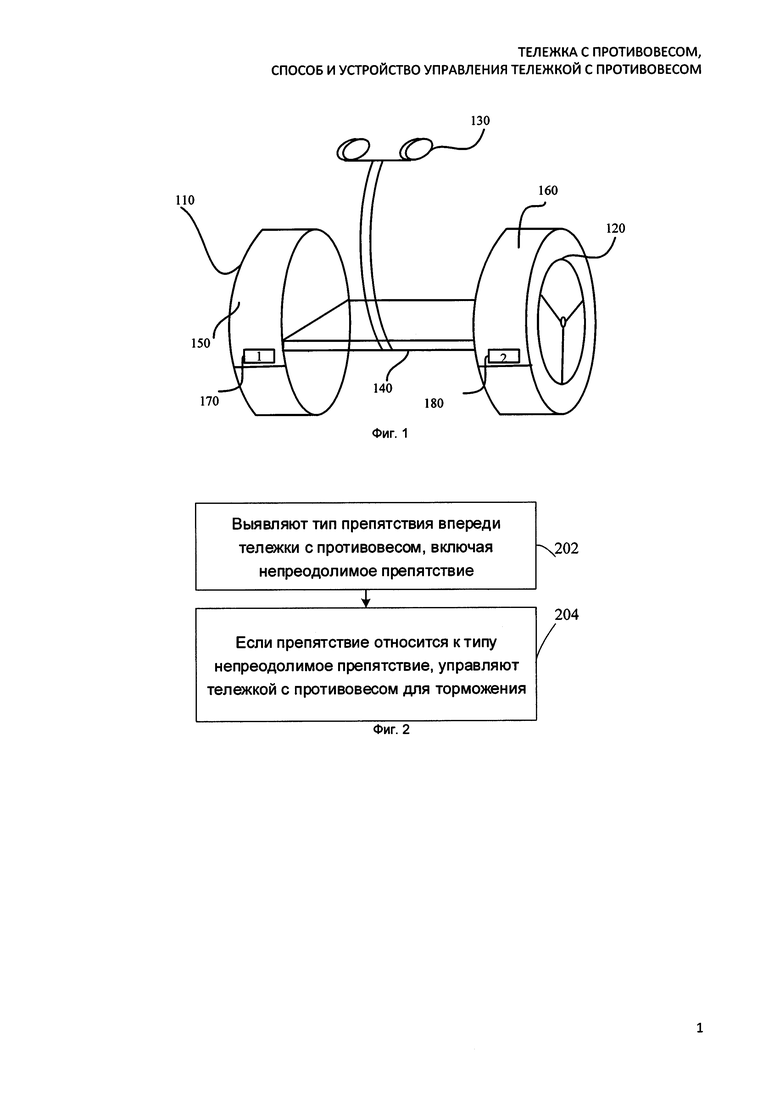
[0071] Фиг. 1 представляет собой схематическое изображение оборудования для осуществления способа управления тележкой с противовесом согласно частному случаю осуществления настоящего изобретения;
[0072] На Фиг. 2 представлена блок-схема, иллюстрирующая способ управления тележкой с противовесом согласно частному случаю его осуществления;
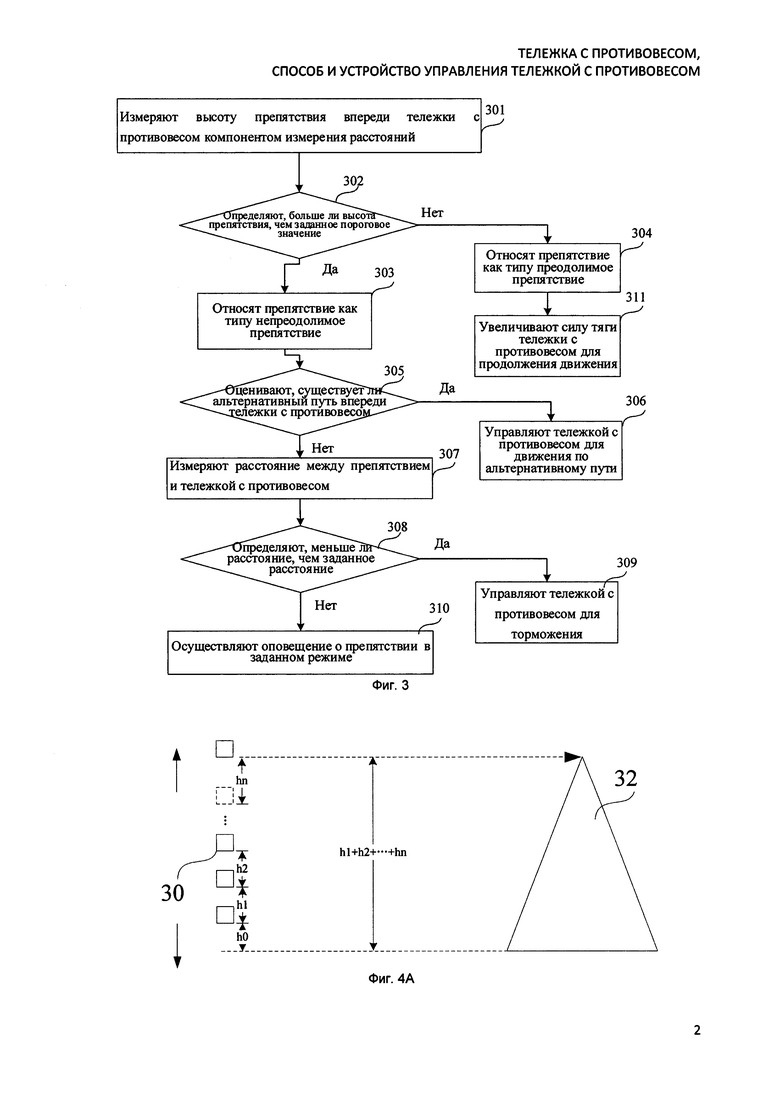
[0073] На Фиг. 3 представлена блок-схема, иллюстрирующая способ управления тележкой с противовесом согласно частному случаю его осуществления;
[0074] На Фиг. 4А представлена блок-схема, иллюстрирующая реализацию эффекта выявления препятствия компонентом измерения расстояний согласно примерному осуществлению изобретения;
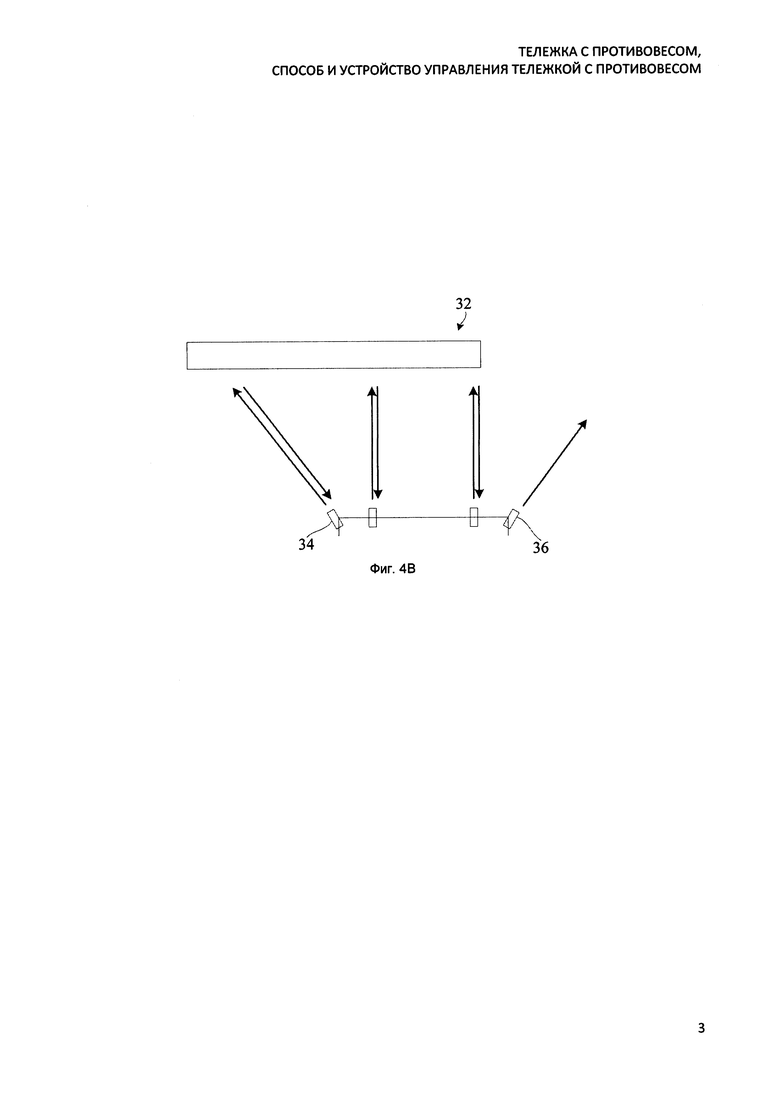
[0075] На Фиг. 4В представлена блок-схема, иллюстрирующая реализацию эффекта оценки, существует ли альтернативный путь впереди тележки с противовесом согласно примерному осуществлению изобретения;
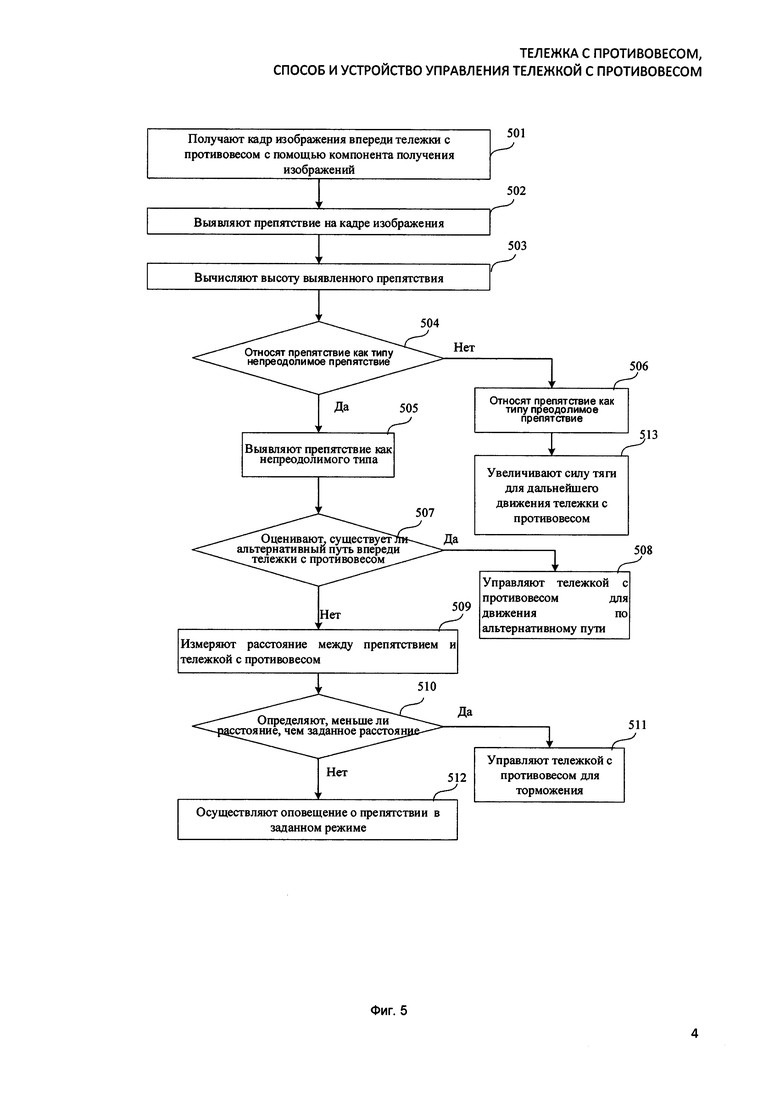
[0076] На Фиг. 5 представлена блок-схема способа управления тележкой с противовесом согласно примерному осуществлению изобретения;
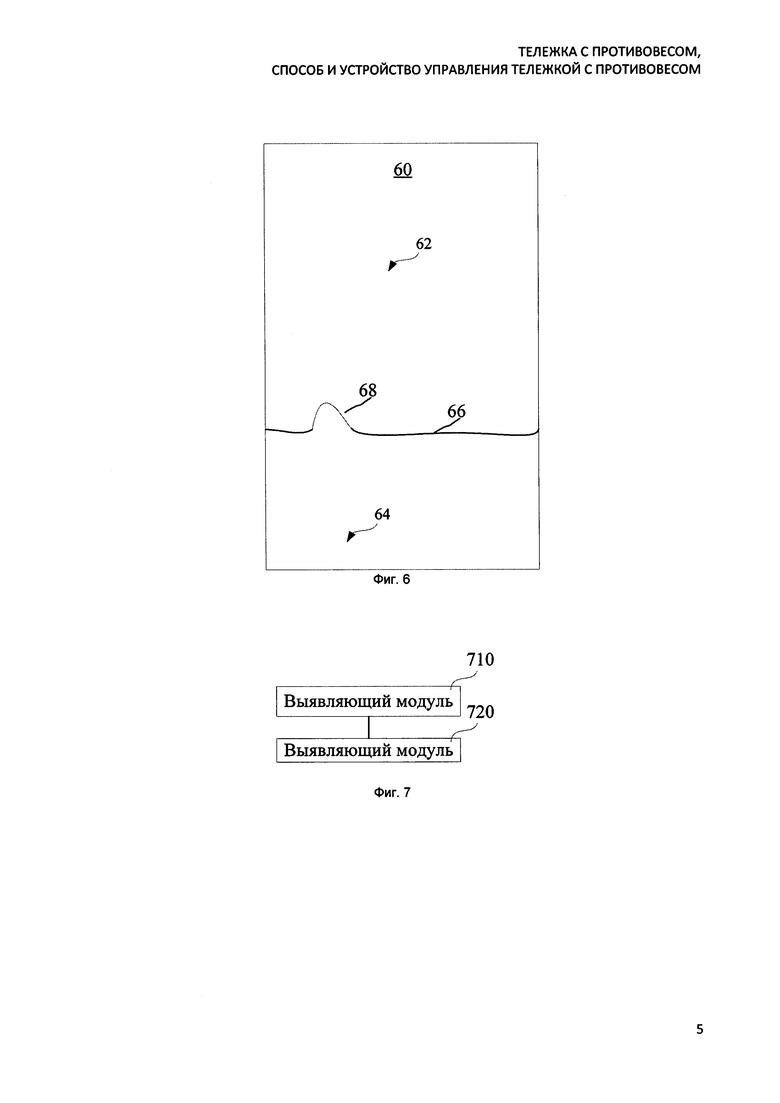
[0077] На Фиг. 6 представлена блок-схема, иллюстрирующая реализацию эффекта выявления препятствия на кадре изображения согласно примерному осуществлению изобретения;
[0078] Фиг. 7 представлена блок-схема устройства управления тележкой с противовесом согласно примерному осуществлению изобретения;
[0079] На Фиг. 8 представлена блок-схема устройства управления тележкой с противовесом согласно частному случаю его осуществления;
[0080] На Фиг. 9 представлена блок-схема тележки с противовесом согласно частному случаю ее осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0081] Ниже дается подробное описание частных случаев осуществления изобретения, которые проиллюстрированы на прилагаемых чертежах, где одинаковые или подобные элементы на разных чертежах обозначены одинаковыми номерами, если не оговорено иное. Способы осуществления изложенных в нижеследующем описании частных случаев осуществления изобретения не охватывают всех возможных его реализаций. Они являются лишь примерами устройств и способов, которые согласуются с аспектами изобретения в соответствии с прилагаемой формулой.
[0082] На Фиг. 1 представлено схематическое изображение оборудования для осуществления способа управления тележкой с противовесом согласно примерному осуществлению настоящего изобретения. Как показано на Фиг. 1, оборудование осуществления может быть двухколесной тележкой с противовесом, включающей два параллельных колеса 110 и 120, два корпуса 150 и 160 соответствующих колес, компонент 130 управления поворотом, несущую педаль 140 и компоненты 170 и 180 выявления препятствий.
[0083] Компонент 130 управления поворотом соединен с несущей педалью 140 и может быть использован для управления поворотом двухколесной тележки с противовесом. Компонент 130 управления поворотом может быть иметь ручное или ножное управление и, таким образом, не ограничен в осуществлении.
[0084] Компоненты 170 и 180 выявления препятствий используются для выявления препятствия впереди двухколесной тележки с противовесом. Компоненты 170 и 180 выявления препятствий могут быть реализованы в виде любых компонентов измерения расстояний для определения размера и расстояния от объекта, такими как измерительное устройство инфракрасных лучей, измерительное устройство ультразвуковых волн и лазерное устройство для измерения расстояний, и т.д., компоненты 170 и 180 выявления препятствий могут также быть любыми компонентами получения изображений для выполнения снимка, например, камерой.
[0085] На Фиг. 1 компонент 170 выявления препятствий обозначен позицией 1 на корпусе 150 колеса, а компонент 180 выявления препятствий обозначен позицией 2 на корпусе 160 колеса. Компоненты 170 и 180 выявления препятствий также могут быть расположены на любом возможном месте, определенным средним специалистом на основании уровня техники, части двухколесной тележки с противовесом, например в месте соединения несущей педали 140 с компонентом 130 управления поворотом, месте определения направления под углом слева спереди левого колеса и месте определения направления под углом справа спереди правого колеса и т.д. Кроме того, количество компонентов 170 и 180 выявления препятствий, равное двум, указано в качестве примера, в то время, как их количество должно быть, по меньшей мере, равно одному. Компоненты 170 и 180 выявления препятствий могут также иметь возможность перемещаться в вертикальном положении или поворачиваться в четырех направлениях: вверх, вниз, влево и вправо.
[0086] Кроме того, двухколесная тележка с противовесом может включать дополнительно другие компоненты такие, как чип управления, память и приводной электродвигатель и т.д. (не показано на фигурах). Причем чип управления соединен с приводным электродвигателем и вышеупомянутым компонентом 130 управления поворотом, и компонентами 170 и 180 выявления препятствий, и элементами управления движением вперед, движением назад, остановкой и поворотом двухколесной тележкой с противовесом согласно исполняемым командам, хранящимся в памяти. Эта особенность не будет описана в осуществлении настоящего изобретения.
[0087] Необходимо заметить, что вышеописанная двухколесная тележка с противовесом является лишь конкретным примером осуществления оборудования, в котором реализован способ управления тележкой с противовесом, предложенный в представленных частных случаях осуществления настоящего изобретения. Способ управления тележкой с противовесом по настоящему изобретению может использоваться не только в двухколесной тележке с противовесом, но также в других тележках с противовесом, которые идентичны или схожи с двухколесной тележкой с противовесом такой, как одноколесная тележка с противовесом. Способы осуществления настоящего изобретения не ограничиваются этим, поэтому не показаны все возможные виды реализации оборудования.
[0088] На Фиг. 2 представлена блок-схема способа управления тележкой с противовесом согласно частному случаю его осуществления, который используется в тележке с противовесом, показанной на Фиг. 1, и включает следующие шаги:
[0089] На шаге 202 выявляется тип препятствия впереди тележки с противовесом, включая непреодолимое препятствие.
[0090] В частных случаях чип управления выявляет тип препятствия впереди тележки с противовесом с помощью компонента выявления препятствий.
[0091] В частных случаях компонент выявления препятствий включает компонент измерения расстояний и/или компонент получения изображений.
[0092] На шаге 204, если препятствие относится к типу непреодолимое препятствие, управляют тележкой с противовесом для торможения.
[0093] В заключении в способе управления тележкой с противовесом, предложенном в данном осуществлении, выявляют тип препятствия впереди тележки с противовесом и управляют тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие, и, таким образом, исключают вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом, кроме того, при автоматическом выявлении тележкой с противовесом препятствия, тележка работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие является непреодолимым препятствием.
[0094] В других частных случаях способ выявления типа препятствия впереди тележки с противовесом на шаге 202 включает, но не ограничивается, следующими двумя частными случаями:
[0095] первый способ включает выявление типа препятствия с помощью компонента измерений расстояний и будет описан далее на примере осуществления, показанном на Фиг. 3;
[0096] второй способ включает выявление типа препятствия с помощью компонента получения изображений и будет описан далее на примере осуществления, показанном на Фиг. 5.
[0097] На Фиг. 3 представлена блок-схема способа управления тележкой с противовесом согласно другому частному случаю его осуществления. На Фиг. 3 иллюстрируется способ управления тележкой с противовесом применительно к двухколесной тележке с противовесом, показанной на Фиг. 1, который заключается в следующих шагах.
[0098] На шаге 301: высота препятствия впереди тележки с противовесом измеряется с помощью компонента измерения расстояний.
[0099] Чип управления тележкой с противовесом управляет компонентом измерений расстояний для отправки сигнала обнаружения наружу с некоторым интервалом в заданное время, при этом сигналом обнаружения может быть лазер, инфракрасный луч или ультразвуковая волна и т.д. Отраженный сигнал возвращается, когда сигнал обнаружения наталкивается на препятствие. Таким образом, компонент измерения расстояний получает отраженный сигнал, когда впереди выявляется препятствие. Обычно, высота препятствия не меньше, чем высота, на которой расположен компонент измерения расстояний.
[00100] Например, компонент измерения расстояний, закрепленный на корпусе колеса тележки с противовесом, расположен на позиции 5 см от земли, и, если получают отраженный сигнал сигнала обнаружения, выявляется, что существует препятствие на высоте, по меньшей мере, 5 см впереди тележки с противовесом; если не получают отраженный сигнал, значит выявлено, что препятствия на высоте, превышающей 5 см впереди тележки с противовесом, не обнаружено.
[00101] В других частных случаях, как показано на Фиг. 4А, компонент 30 измерения расстояний может перемещаться на тележке с противовесом вверх или вниз в вертикальном направлении. Компонент 30 измерения расстояний может посылать сигнал обнаружения в различных положениях в вертикальном направлении. В других частных случаях компонент 30 измерения расстояний посылает сигнал обнаружения на высоте h0 от земли; после полученного отраженного сигнала, компонент 30 перемещается на высоту до h1 и посылает сигнал обнаружения еще раз; после полученного отраженного сигнала, компонент 30 перемещается на высоту до п2 и посылает сигнал обнаружения снова. Процесс повторяется, в итоге, когда высота от земли составляет h1+h2+…+hn и компонент 30 измерения расстояний не получает отраженный сигнал, определяют вершину препятствия 32. При этом высота препятствия составляет (h1+h2+…+hn).
[00102] Необходимо отметить, что частные случаи осуществления настоящего изобретения не ограничиваются способом измерения высота препятствия посредством компонента измерения расстояний. Например, тележка с противовесом может также иметь множество компонентов измерения расстояний в других их положениях для измерения высоты препятствия согласно тому, получает ли каждый из множества компонент измерения расстояний, отраженный сигнал сигнала обнаружения.
[00103] На шаге 302: определяют, больше ли высота препятствия, чем заданное пороговое значение.
[00104] В других вариантах, заданное пороговое значение является максимальной высотой препятствия, которое может быть преодолено тележкой с противовесом. Заданное пороговое значение может составлять величину «1/х» от высоты шины или иметь другое числовое значение, которое не ограничено данным частным случаем.
[00105] Если высота препятствия выше, чем заданное пороговое значение, переходят к шагу 303;
[00106] если высота препятствия ниже, чем заданное пороговое значением, переходят к шагу 304;
[00107] на шаге 303: если высота препятствия выше заданного порогового значения, препятствие выявляется, как препятствие преодолимого типа.
[00108] Когда препятствие является препятствием непреодолимого типа, переходят к шагу 305.
[00109] На шаге 304: если высота препятствия не выше, чем заданное пороговое значение, препятствие определяется как препятствие преодолимого типа.
[00110] Когда препятствие является препятствием преодолимого типа, переходят к шагу 311.
[00111] На шаге 305: оценивают, существует ли альтернативный путь впереди тележки с противовесом.
[00112] Этот шаг включает, но не ограничивается следующими двумя частными случаями осуществления:
[00113] 1. Оценивают, существует ли альтернативный путь слева и справа по ходу движения с помощью компонента измерения расстояний, расположенного под углом слева относительно направления движения или под углом справа относительно направления движения тележки с противовесом.
[00114] В частных случаях положение под углом впереди слева является положением, которое формирует первый угол между сторонами от правого переднего положения до левого, а положение под углом впереди справа является положением, которое формирует второй угол между сторонами от правого переднего положения к левому. Компонент измерения расстояний оценивает, существует ли препятствие в положении под углом слева спереди или в положении под углом справа спереди, если препятствия не существует, то существует альтернативный путь.
[00115] Например, как показано на Фиг. 4В, тележка с противовесом имеет компонент 34 измерения расстояний для определения положения под углом слева спереди левого колеса и компонент 36 измерения расстояний для обнаружения положения под углом справа спереди правого колеса.
[00116] Если компонент измерения расстояний для обнаружения препятствий, расположенный впереди справа по ходу движения, получает отраженный сигнал сигнала обнаружения, а компонент 34 измерения расстояний также получает отраженный сигнал сигнала обнаружения, но компонент 36 измерения расстояний не получает отраженный сигнал, выявляют, что существует альтернативный путь в направлении впереди справа.
[00117] Подобным образом, если компонент измерения расстояний для обнаружения препятствий, расположенный впереди справа по ходу движения, получает отраженный сигнал сигнала обнаружения, а компонент 36 измерения расстояний также получает отраженный сигнал сигнала обнаружения, но компонент 34 измерения расстояний не получает отраженный сигнал, выявляют, что существует альтернативный путь в направлении впереди слева.
[00118] 2. Оценивают, существует ли альтернативный путь слева или справа по ходу движения с помощью компонента измерения расстояний, имеющего возможность вращаться (поворачиваться) в горизонтальной плоскости.
[00119] Другими словами, компонент измерения расстояний может поворачиваться влево или вправо, или и влево, и вправо. В этом случае компонент измерения расстояний оценивает, существует ли препятствие под углом слева спереди или под углом справа спереди, и, если препятствия не существует, то существует альтернативный путь.
[00120] Если альтернативный путь существует, выполняется шаг 306, а если альтернативного пути не существует, переходят к шагу 307.
[00121] На шаге 306: если впереди тележки с противовесом существует альтернативный путь, тележка с противовесом управляется для движения по альтернативному пути.
[00122] Если впереди тележки с противовесом существует альтернативный путь, чип управления управляет тележкой с противовесом для движения по альтернативному пути.
[00123] На шаге 307: измеряют расстояние между препятствием и тележкой с противовесом.
[00124] В частных случаях чип управления измеряет расстояние между препятствием перед любым из колес и тележкой с противовесом с помощью компонента измерения расстояний. Например, чип управления получает расстояние путем вычисления согласно времени передачи сигнала обнаружения и времени приема отраженного сигнала, в сочетании со скоростью передвижения тележки с противовесом.
[00125] На шаге 308: определяют, меньше ли расстояние, чем заданное расстояние, которое обнаружено.
[00126] Чип управления определяет, меньше ли расстояние между препятствием и тележкой с препятствием, чем заданное расстояние.
[00127] В частных случаях заданное расстояние является максимальным расстоянием, необходимым для поворота тележки с противовесом. Заданное расстояние может иметь значение «х» диаметров шины или другое числовое значение, которое не ограничено в осуществлении.
[00128] В частных случаях заданное расстояние является положительной пропорцией по отношению к текущей скорости тележки с противовесом, быстрее текущей скорости с большим заданным значением, и медленнее текущей скорости с меньшим заданным значением.
[00129] Если расстояние меньше заданного расстояния, переходят к шагу 309; а если расстояние больше заданного расстояния, переходят к шагу 310.
[00130] На шаге 309: если расстояние меньше заданного расстояния, тележка с противовесом управляется для торможения, и оповещение о препятствии осуществляется в заданном режиме.
[00131] Если расстояние меньше заданного расстояния, чип управления управляет торможением тележки с противовесом для остановки. В общем, чип управления управляет тележкой с противовесом для торможения и остановки перед препятствием, однако, возможна ситуация, когда тележка с противовесом может столкнуться с препятствием во время торможения.
[00132] В частных случаях чип управления также осуществляет оповещение о препятствии в заданном режиме, причем заданный режим включает, по меньшей мере, один звуковой сигнал в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
[00133] Например, когда выявлено, что существует непреодолимое препятствие перед тележкой с противовесом и расстояние между непреодолимым препятствием и тележкой с противовесом достигает заданного расстояния, тележка с противовесом будет издавать звуковой сигнал оповещения в виде гудка.
[00134] На шаге 310: если расстояние меньше заданного расстояния, тележка с противовесом управляется для последующего движения.
[00135] На шаге 311: если препятствия относится к типу преодолимое препятствие, сила тяги тележки с противовесом увеличивается для дальнейшего движения.
[00136] Когда препятствие относится к типу преодолимое препятствие, чип управления управляет приводным электродвигателем для увеличения силы тяги тележки с противовесом для продвижения.
[00137] Необходимо отметить, что последовательность вышеописанных шагов 305, 307 и 310 не ограничивается вышеописанной последовательностью и не ограничивается данным примером осуществления.
[00138] В заключении следует отметить, что способ управления тележкой с противовесом, описанный в данном примере осуществления, выявляет тип препятствия впереди тележки с противовесом и управляет тележкой с противовесом для торможения, если типом препятствия является непреодолимое препятствие, и, таким образом, исключается вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом, кроме того, при автоматическом выявлении тележкой с противовесом препятствия, тележка работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие является непреодолимым препятствием.
[00139] Способ управления тележкой с противовесом, предложенный в данном примере осуществления, включает измерение высоты и расстояния до препятствия с помощью компонента измерения расстояний, и, таким образом, тележка с противовесом для выявления типа препятствия и торможения запускается для объезда препятствия согласно расстоянию, между препятствием и тележкой с противовесом.
[00140] Способ управления двухколесной тележкой с противовесом, предложенный в данном примере осуществления, включает оценку, существует ли альтернативный путь впереди тележки с противовесом и автоматическое управление тележкой с противовесом для движения по альтернативному пути, если альтернативный путь существует, таким образом, исключается столкновение тележки с противовесом с препятствием, что не отражается на нормальном перемещении тележки с противовесом.
[00141] На Фиг. 5 представлена блок-схема способа управления тележкой с противовесом согласно примерному осуществлению изобретения. На Фиг. 5 иллюстрируется способ управления тележкой с противовесом, реализованной в виде оборудования, показанного на Фиг. 1, при этом способ заключается в следующих шагах.
[00142] На шаге 501: получают кадр изображения впереди тележки с противовесом с помощью компонента получения изображений.
[00143] Компонент получения изображений может быть закреплен на корпусе каждого колеса тележки с противовесом, а также в месте соединения несущей педали с компонентом управления поворотом.
[00144] Чип управления управляет компонентом получения изображений для получения изображений впереди тележки с противовесом для формирования непрерывных кадров изображений покадрово.
[00145] На шаге 502 выявляют препятствие на кадре изображения;
[00146] Так как цветовые различия между землей и другими объектами на земле очень явны, земля и другие объекты на кадрах изображений могут быть определены согласно изменениям пикселей, находящимся на кадрах изображений.
[00147] В частных случаях, как показано на Фиг. 6, после получения чипом управления кадра 60 изображения, полученного компонентом получения изображений, получают первую область 62 и вторую область 64 с помощью бинарного процесса кадра 60 изображения согласно цветовым различиям, при этом линия 66 дороги формируется на пересечении первой 62 и второй 64 областей. Чип управления обнаруживает, имеет ли линия 66 дороги выступ 68. Если линия 66 дороги имеет выступ, чип управления выявляет выступ 68 как препятствие.
[00148] На шаге 503: вычисляют высота выявленного препятствия.
[00149] В первом возможном способе осуществления чип управления вычисляет высоту препятствия согласно высоте препятствия, на кадре изображения с учетом заданной шкалы измерений, например, если заданная шкала измерений составляет 1:3, тогда высота препятствия на кадре изображения составляет 1 см, а вычисленная высота препятствия - 3 см. Когда препятствие скрыто для тележки с противовесом, вычисленная высота препятствия также неизвестна.
[00150] Во втором возможном способе осуществления тележка с противовесом также содержит компонент измерения расстояний. Компонент измерения расстояний может измерять расстояния между препятствием и тележкой с противовесом. Чип управления вычисляет высоту препятствия согласно высоте препятствия, на кадре изображения и расстоянию, определенному с помощью шкалы измерения, например, если шкала измерений, соответствующая расстоянию, составляет 1:5, тогда высота препятствия на кадре изображения составляет 1 см, а высота препятствия вычисляется как 5 см.
[00151] Согласно третьему возможному способу осуществления имеются два компонента получения изображений, при этом чип управления может вычислять истинную высоту препятствия согласно выступу (т.е., препятствию) на двух кадрах изображений, полученных двумя компонентами получения изображений в сочетании с бинокулярным принципом отображения.
[00152] Необходимо отметить, что это осуществление не ограничивается способами, в которых чип управления вычисляет высоту препятствия.
[00153] На шаге 504 определяют, больше ли высота препятствия, чем заданное пороговое значение.
[00154] Чип управления определяет, больше ли вычисленная высота препятствия, чем заданное пороговое значение.
[00155] В частных случаях заданное пороговое значение является максимальной высотой препятствия, которое может быть преодолено двухколесной тележкой с противовесом.
[00156] Если высота препятствия больше, чем заданное пороговое значение, переходят к шагу 505.
[00157] Если высота препятствия меньше, чем заданное пороговое значение, переходят к шагу 506.
[00158] На шаге 505: если высота препятствия больше, чем заданное пороговое значение, препятствие относят к препятствию непреодолимого типа.
[00159] Когда препятствие является препятствием непреодолимого типа, переходят к шагу 507.
[00160] На шаге 506: если высота препятствия меньше, чем заданное пороговое значение, препятствие относят к препятствию преодолимого типа.
[00161] Когда препятствие является препятствием преодолимого типа, переходят к шагу 513.
[00162] На шаге 507: когда препятствие является препятствием непреодолимого типа, оценивают, существует ли альтернативный путь впереди тележки с противовесом.
[00163] Этот шаг включает, но не ограничивается дальнейшими тремя способами осуществления:
[00164] 1. Оценивают, существует ли альтернативный путь справа и слева относительно направления движения на кадрах изображений, полученных компонентом получения изображений.
[00165] По аналогии с действиями на шаге 501, чип управления оценивает, существует ли препятствие под углом слева спереди или под углом справа спереди на кадрах изображений, полученных компонентом получения изображений, и, если препятствия не существует, существует альтернативный путь.
[00166] В других вариантах, положение под углом впереди слева является положением, которое формирует первый угол между сторонами от правого переднего положения до левого, а положение под углом впереди справа является положением, которое формирует второй угол между сторонами от правого переднего положения к левому.
[00167] 2. Оценивается, существует ли альтернативный путь слева и справа по ходу движения с помощью компонента измерения расстояний, расположенного впереди под углом слева относительно направления движения или под углом справа относительно направления движения тележки с противовесом.
[00168] Чип управления оценивает, существует ли любое препятствие в под углом слева спереди или под углом справа спереди с помощью компонента измерения расстояний, и, если препятствия не существует, существует альтернативный путь.
[00169] 3. Оценивается, существует ли альтернативный путь слева или справа по ходу движения с помощью компонента измерения расстояний, имеющего возможность вращаться в горизонтальной плоскости.
[00170] Другими словами, компонент измерения расстояний находится в состоянии поворота влево, поворота вправо или поворота и влево, и вправо. Тогда, компонент измерения расстояний оценивает, существует ли альтернативный путь слева или справа по ходу движения с помощью компонента измерения расстояний, и если препятствия не существует, то существует альтернативный путь.
[00171] Если альтернативный путь существует, переходят к шагу 508; если альтернативный путь не существует, переходят к шагу 509.
[00172] На шаге 508: если альтернативный путь существует впереди тележки с противовесом, тележка с противовесом управляется для движения по альтернативному пути.
[00173] Если альтернативный путь существует впереди тележки с противовесом, чип управления управляет тележкой с противовесом для движения по альтернативному пути.
[00174] На шаге 509 измеряют расстояние между препятствием и тележкой с противовесом.
[00175] В частных случаях чип управления измеряет расстояние между препятствием впереди любого из колес и тележкой с противовесом с помощью компонента измерения расстояний. Например, чип управления получает расстояние путем вычисления согласно времени передачи сигнала обнаружения и времени приема отраженного сигнала с учетом скорости передвижения тележки с противовесом.
[00176] На шаге 510: определяют, меньше ли расстояние, чем заданное расстояние.
[00177] Чип управления определяет, меньше ли расстояние между препятствием и тележкой с противовесом, чем заданное расстояние.
[00178] В частных случаях заданное расстояние является максимальным расстоянием, необходимым для поворота тележки. Заданное расстояние может иметь значение «х» диаметров шины или другое числовое значение и не ограничено в реализации. [00179] В частных случаях заданное расстояние является положительной пропорцией к текущей скорости тележки с противовесом, быстрее текущей скорости, больше заданного значения; и медленнее текущей скорости, меньше заданного значения.
[00180] Если расстояние меньше заданного расстояния, переходят к шагу 511; а если расстояние больше заданного расстояния, переходят к шагу 512.
[00181] На шаге 511: если расстояние меньше заданного расстояния, тележка с противовесом управляется для торможения, и оповещение о препятствии осуществляется в заданном режиме.
[00182] Если расстояние меньше заданного расстояния, чип управления управляет торможением тележки с противовесом для остановки. В общем, чип управления управляет тележкой с противовесом для торможения и остановки перед препятствием, однако, возможна ситуация, когда тележка с противовесом сталкивается с препятствием во время торможения.
[00183] В частных случаях чип управления также предлагает оповещение о препятствии в заданном режиме, причем заданный режим включает, по меньшей мере, один звуковой сигнал в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
[00184] Например, когда выявлено, что существует непреодолимое препятствие впереди тележки с противовесом, и когда непреодолимое препятствие достигается на заданном расстоянии от тележки с противовесом, тележка с противовесом.
[00185] На шаге 512: если расстояние меньше, чем заданное расстояние, тележка с противовесом управляется для последующего движения.
[00186] На шаге 513: если препятствие относится к типу преодолимое препятствие, сила тяги тележки с противовесом увеличивается для дальнейшего движения.
[00187] Если препятствие относится к типу преодолимое препятствие, чип управления управляет приводным электродвигателем для увеличения силы тяги тележки с противовесом для движения.
[00188] В способе управления тележкой с противовесом в соответствии с данным примером осуществления, выявляют тип препятствия впереди тележки с противовесом и управляют тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие, таким образом, исключается вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом, кроме того, при автоматическом выявлении тележкой с противовесом препятствия, тележка работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие является непреодолимым препятствием.
[00189] Способ управления тележкой с противовесом, предложенный в данном примере осуществления, включает измерение высоты и расстояния до препятствия с помощью компонента измерения расстояний, и, таким образом, тележка с противовесом для выявления типа препятствия и торможения запускается для объезда препятствия согласно расстоянию, между препятствием и тележкой с противовесом.
[00190] Способ управления двухколесной тележкой с противовесом, предложенный в данном примере осуществления, включает оценку, существует ли альтернативный путь впереди тележки с противовесом и автоматическое управление тележкой с противовесом для движения по альтернативному пути, если альтернативный путь существует, таким образом, исключается столкновение тележки с противовесом с препятствием, что не отражается на нормальном перемещении тележки с противовесом.
[00191] Далее описываются примеры осуществления устройства настоящего изобретения, используемого для выполнения способа согласно настоящего изобретения. Касаемо деталей, не раскрытых в осуществлениях устройства настоящего изобретения, может быть сделана отсылка к осуществлениям способа настоящего изобретения.
[00192] На Фиг. 7 представлена блок-схема устройства управления тележкой с противовесом согласно его примерному осуществлению. Как показано на Фиг. 7, устройство управления тележкой с противовесом, используемое при осуществлении способа управления тележкой с противовесом, реализовано в виде оборудования на Фиг. 1. Устройство управления тележкой с противовесом включает по существу выявляющий модуль 710 и управляющий модуль 720.
[00193] Выявляющий модуль 710 выполнен с возможностью выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие.
[00194] Первый управляющий модуль 720 выполнен с возможностью управления тележкой с противовесом для торможения, когда препятствие относится к типу непреодолимое препятствие.
[00195] В заключение, устройство управления тележкой с противовесом, предложенное в данном осуществлении, выявляет тип препятствия впереди тележки с противовесом и управляет тележкой с противовесом для торможения, если типом препятствия является непреодолимое препятствие, таким образом исключается вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом, кроме того, при автоматическом выявлении тележкой с противовесом препятствия, тележка работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие является непреодолимым препятствием.
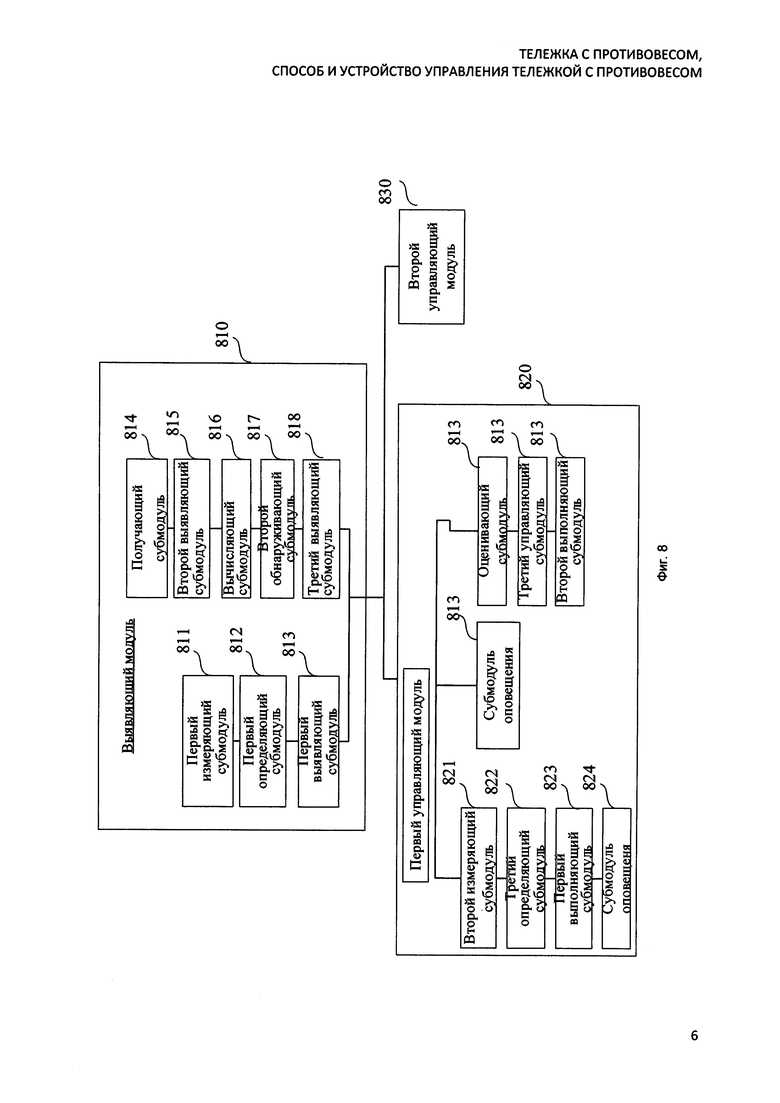
[00196] На Фиг. 8 представлена блок-схема устройства управления тележкой с противовесом согласно частному случаю ее осуществления. Как показано на Фиг. 8, устройство управления тележкой с противовесом может быть реализовано полностью или в части тележки с противовесом с помощью программного обеспечения, аппаратного обеспечения или их сочетания, причем устройство управления тележкой с противовесом включает по существу выявляющий модуль 810 и первый управляющий модуль 820.
[00197] Выявляющий модуль 810 выполнен с возможностью выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие;
[00198] Первый управляющий модуль 820 выполнен с возможностью управления тележкой с противовесом для торможения, когда препятствие относится к типу непреодолимое препятствие.
[00199] В частных случаях, если препятствие относится к типу преодолимое препятствие, устройство дополнительно включает второй управляющий модуль 830.
[00200] Второй управляющий модуль 830 выполнен с возможностью увеличения силы тяги тележки с противовесом для продолжения движения, когда препятствие относится к типу преодолимое препятствие.
[00201] В частных случаях выявляющий модуль 810 включает: первый измеряющий субмодуль 811, первый определяющий субмодуль 812 и первый выявляющий субмодуль 813.
[00202] Первый измеряющий субмодуль 811 выполнен с возможностью измерения высоты препятствия впереди тележки с противовесом с помощью компонента измерения расстояний;
[00203] первый определяющий субмодуль выполнен с возможностью определения, больше ли высота препятствия, чем заданное пороговое значение;
[00204] первый выявляющий субмодуль выполнен с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
[00205] В частных случаях выявляющий модуль 810 дополнительно включает: получающий субмодуль 814, второй выявляющий субмодуль 815, вычисляющий субмодуль 816, второй определяющий субмодуль 817 и третий выявляющий субмодуль 818.
[00206] Получающий субмодуль 814 выполнен с возможностью получения кадра изображения впереди тележки с противовесом с помощью компонента получения изображений;
[00207] второй выявляющий субмодуль 815 выполнен с возможностью выявления препятствия на кадре изображения;
[00208] вычисляющий субмодуль 816 выполнен с возможностью вычисления высоты выявленного препятствия;
[00209] второй определяющий субмодуль 817 выполнен с возможностью определения, больше ли высота препятствия, чем заданное пороговое значение;
[00210] третий выявляющий субмодуль 818 выполнен с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
[00211] В частных случаях вышеописанный первый управляющий модуль 820 дополнительно включает: второй измеряющий субмодуль 821, третий обнаруживающий субмодуль 822 и первый выполняющий субмодуль 823.
[00212] Второй измеряющий субмодуль 821 выполнен с возможностью измерения расстояния между препятствием и тележкой с противовесом;
[00213] третий определяющий субмодуль 822 выполнен с возможностью определения, меньше ли расстояние, чем заданное расстояние;
[00214] первый выполняющий субмодуль 823 выполнен с возможностью выполнения управления тележкой с противовесом для торможения, когда расстояние меньше, чем заданное пороговое значение.
[00215] В частных случаях вышеописанный первый управляющий модуль 820 дополнительно включает: субмодуль 824 оповещения.
[00216] Субмодуль 824 оповещения выполнен с возможностью оповещения о препятствии в заданном режиме, когда препятствие относится к типу непреодолимое препятствие;
[00217] причем заданный режим включает по меньшей мере одну звуковую сигнализацию в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
[00218] В частных случаях устройство управления тележкой с противовесом дополнительно включает: оценивающий субмодуль 825, третий управляющий субмодуль 826 и второй выполняющий субмодуль 827.
[00219] Оценивающий субмодуль выполнен с возможностью оценки, существует ли альтернативный путь впереди тележки с противовесом, когда препятствие относится к типу непреодолимое препятствие;
[00220] третий управляющий субмодуль выполнен с возможностью управления тележкой с противовесом для движения по альтернативному пути, когда впереди тележки с противовесом существует альтернативный путь;
[00221] первый управляющий модуль дополнительно выполнен с возможностью контролирования тележки с противовесом для торможения, когда впереди тележки с противовесом не существует альтернативного пути.
[00222] Таким образом, в устройстве управления тележкой с противовесом, предложенном в данном примере осуществления, выявляют тип препятствия впереди тележки с противовесом и управляют тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие, и, таким образом, исключают вероятность падения водителя из-за непреодолимого препятствия, находящегося впереди тележки с противовесом, кроме того, при автоматическом выявлении тележкой с противовесом препятствия, тележка работает на упреждение падения, вызванное быстрым столкновением с препятствием, когда препятствие является непреодолимым препятствием.
[00223] Устройство управления тележкой с противовесом, предложенное в данном примере осуществления, измеряет высоту и расстояние до препятствия с помощью компонента измерения расстояний, и, таким образом, тележка с противовесом для выявления типа препятствия и торможения запускается для объезда препятствия согласно расстоянию, между препятствием и тележкой с противовесом.
[00224] Устройство управления тележкой с противовесом, предложенное в данном примере осуществления, также оценивает, существует ли альтернативный путь впереди тележки с противовесом и автоматически управляет тележкой с противовесом для движения по альтернативному пути, если альтернативный путь существует, таким образом, удается избежать столкновение тележки с противовесом с препятствием, что не отражается на нормальном перемещении тележки с противовесом.
[00225] В частном случае предлагается тележка с противовесом, в которой осуществляется способ управления тележкой с противовесом, предложенный в настоящем изобретении, при этом тележка с противовесом включает: чип управления и память для хранения инструкций, исполняемых чипом управления,
[00226] причем чип управления выполнен с возможностью:
[00227] выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие;
[00228] управления тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие.
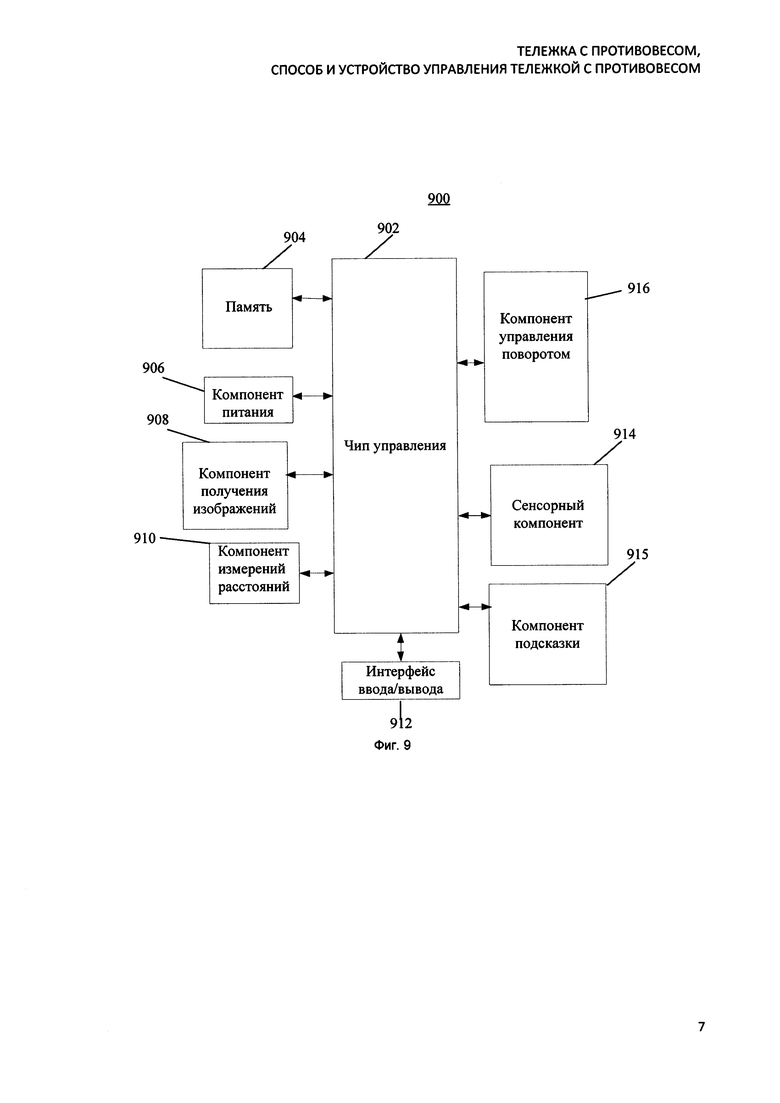
[00229] На Фиг. 9 представлена блок-схема тележки с противовесом согласно примерному ее осуществлению. Показанная на Фиг. 9 тележка 900 с противовесом может включать один или более компонентов: чип 902 управления, память 904, компонент 906 питания, компонент 908 получения изображений, компонент 910 измерения расстояний, интерфейс 912 ввода/вывода (I/O), сенсорный компонент 914 и компонент 916 управления поворотом.
[00230] Чип 902 управления в основном полностью контролирует тележку 900 с противовесом, такими операциями, которые относятся к движению вперед, движению назад, ускорению и торможению. При этом чип 902 управления включает один или более модулей для облегчения взаимодействия между чипом 902 управления и другими компонентами. Например, чип 902 управления может включать модуль получения изображений для облегчения взаимодействия между компонентом 908 получения изображений и чипом 902 управления.
[00231] Память 904 выполнена с возможностью хранения различных типов данных для поддержки работы тележки 900 с противовесом. Примеры таких данных включают в себя инструкции для любого приложения или способа, работающего работающих на тележке 900 с противовесом. Память 904 может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, Статического Оперативного Запоминающего Устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого Постоянного Запоминающего Устройства (СППЗУ), Программируемого Постоянного Запоминающего Устройства (ППЗУ), Постоянного Запоминающего Устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[00232] Компонент 906 питания обеспечивает электричеством различные компоненты тележки 900 с противовесом. Компонент 906 питания может включать систему управления электропитанием, один или более источник питания и другие узлы для генерации, управления и распределения электроэнергии к тележке 900 с противовесом.
[00233] Компонент 908 получения изображений входит в состав тележки 900 с противовесом. В частных случаях компонент 908 получения изображений включает переднюю и/или заднюю камеры. Когда тележка 900 с противовесом находится в рабочем режиме, таком как режим фотографирования или режим видео, передняя или задняя камеры могут получать внешние данные мультимедиа. Каждая из указанных камер может быть системой фиксированной оптической линзы или может иметь фокусное расстояние и функциональность оптического приближения.
[00234] Компонент 910 измерения расстояний выполнен с возможностью отправки и/или получения сигнала обнаружения. Например, компонент 910 обнаружения расстояний включает лазерный передатчик, когда тележка 900 с противовесом находится в режиме работы, таком как когда она получает отраженный лазер, лазерный передатчик выполнен с возможностью получения отраженного сигнала обнаружения. Полученный отраженный сигнал может быть дополнительно сохранен в памяти 904.
[00235] Интерфейс 912 ввода/вывода обеспечивает интерфейс между чипом 902 управления и периферийными интерфейсными модулями, а вышеуказанными периферийными интерфейсными модулями может быть USB флеш диск или аудио плеер, и т.д.
[00236] Сенсорный компонент 914 включает один или более сенсоров для обеспечения оценки состояния различных аспектов тележки 900 с противовесом. Например, сенсорный компонент 914 может определить состояния вкл/выкл тележки 900 с противовесом и обнаружить присутствие объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент 914 содержит оптический датчик (например, КМОП или ПЗС-датчик изображения) выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент 914 включает датчик ускорения, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[00237] Компонент 916 управления поворотом выполнен с возможностью облегченного управления тележки 900 с противовесом. Компонент 916 управления поворотом может иметь как ручное, так и ножное управление.
[00238] В одном из вариантов осуществления тележка 900 с противовесом может быть реализована посредством одной или более Специализированных Интегральных Схем (СИС), Цифрового Сигнального Процессора (ЦСП), Устройств Цифровой Обработки Сигнала (УЦОС), Программируемым Логическим Устройством (ПЛУ), логической микросхемой, программируемой в условиях эксплуатации (ППВМ), посредством контроллера, микроконтроллера, микропроцессора или других электронных компонентов и может быть сконфигурирована для реализации способа управления тележкой с противовесом.
[00239] Специалист в данной области техники может легко представить другие варианты изобретения из приведенного здесь описания и применение на практике описанного здесь изобретения. Настоящее изобретение предназначено для того, чтобы учесть любые варианты использования или применения общих принципов заявленного изобретения, включая частные случаи, которые появляются в пределах известной или обычной практики в уровне техники. Формула, определяющая объем охраны настоящего изобретения, полностью основана на описании, раскрывающем его сущность и включающего частные случаи его осуществления.
[00240] Следует принять во внимание, что настоящее изобретение не ограничивается конкретными конструкциями, которые описаны выше и проиллюстрированы на прилагаемых чертежах, и любые их модификации, равноценные замены и улучшения могут быть сделаны без отступления от области их применения. Объем охраны изобретения только может быть ограничен прилагаемой формулой изобретения.
Группа изобретений относится к области автоматического управления, в частности к способам управления тележкой с противовесом. Способ управления тележкой с противовесом, при котором выявляют тип препятствия впереди тележки с противовесом, путем измерения высоты препятствия впереди тележки с противовесом. Если препятствие относится к типу непреодолимое препятствие, то управляют тележкой с противовесом для торможения. Если препятствие относится к типу преодолимое препятствие, то увеличивают силу тяги для продолжения движения тележки с противовесом. Устройство управления тележкой с противовесом включает выявляющий модуль и первый и второй управляющие модули. Тележка с противовесом включает чип управления, память для хранения инструкций. Достигается повышение безопасности при использовании тележки. 3 н. и 10 з.п. ф-лы, 9 ил.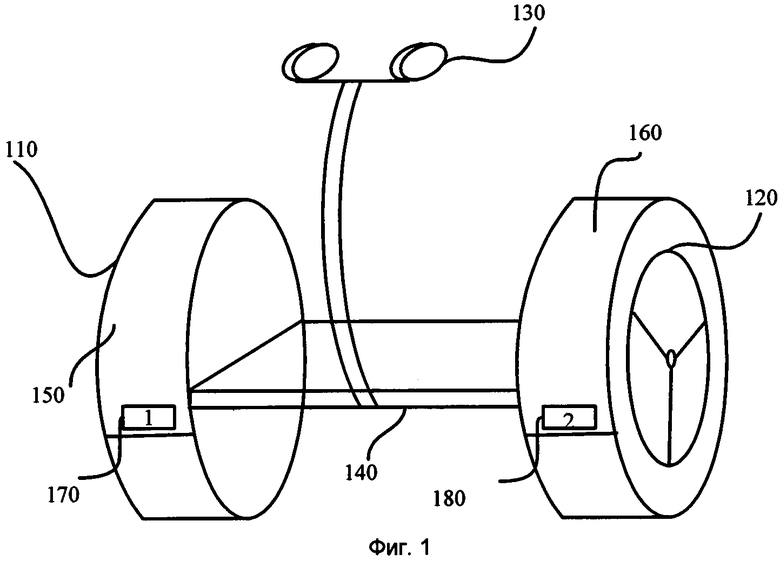
1. Способ управления тележкой с противовесом, характеризующийся тем, что:
выявляют тип препятствия впереди тележки с противовесом, включая непреодолимое препятствие и преодолимое препятствие, путем измерения высоты препятствия впереди тележки с противовесом;
если препятствие относится к типу непреодолимое препятствие, то управляют тележкой с противовесом для торможения;
если препятствие относится к типу преодолимое препятствие, то увеличивают силу тяги для продолжения движения тележки с противовесом.
2. Способ по п. 1, отличающийся тем, что выявление типа препятствия впереди тележки с противовесом заключается в том, что:
измеряют высоту препятствия впереди тележки с противовесом с помощью компонента измерения расстояний;
определяют, больше ли высота препятствия, чем заданное пороговое значение;
если высота препятствия больше, чем заданное пороговое значение, относят препятствие к типу непреодолимое препятствие.
3. Способ по п. 1, отличающийся тем, что выявление типа препятствия впереди тележки с противовесом заключается в том, что:
получают кадр изображения впереди тележки с противовесом с помощью компонента получения изображений;
выявляют препятствие на кадре изображения;
вычисляют высоту выявленного препятствия;
определяют, больше ли высота препятствия, чем заданное пороговое значение;
если высота препятствия больше, чем заданное пороговое значение, относят препятствие к типу непреодолимое препятствие.
4. Способ по п. 1, отличающийся тем, что дополнительно:
измеряют расстояние между препятствием и тележкой с противовесом;
определяют, меньше ли расстояние, чем заданное расстояние;
если расстояние меньше, чем заданное расстояние, выполняют управления тележкой с противовесом для торможения.
5. Способ по п. 1, отличающийся тем, что, если препятствие относится к типу непреодолимое препятствие, осуществляют оповещение о препятствии в заданном режиме, причем заданный режим оповещения включает, по меньшей мере, одну звуковую сигнализацию в виде вибрации заданной части тележки с противовесом и мигание индикаторной лампочки.
6. Способ по п. 1, отличающийся тем, что:
если препятствие относится к типу непреодолимое препятствие, оценивают, существует ли альтернативный путь впереди тележки с противовесом;
если существует альтернативный путь тележки с противовесом, управляют тележкой с противовесом для движения по альтернативному пути;
если не существует альтернативного пути впереди тележки с противовесом, выполняют управления тележки с противовесом для торможения.
7. Устройство управления тележкой с противовесом, характеризующееся тем, что включает:
выявляющий модуль, выполненный с возможностью выявления типа препятствия впереди тележки с противовесом, включая непреодолимое препятствие и преодолимое препятствие, путем измерения высоты препятствия впереди тележки с противовесом;
первый управляющий модуль, выполненный с возможностью управления тележкой с противовесом для торможения, когда препятствие относится к типу непреодолимое препятствие;
второй управляющий модуль, выполненный с возможностью увеличения силы тяги тележки с противовесом для продолжения движения, если препятствие относится к типу преодолимое препятствие.
8. Устройство по п. 7, отличающееся тем, что выявляющий модуль включает:
первый измеряющий субмодуль, выполненный с возможностью измерения высоты препятствия впереди тележки с противовесом с помощью компонента измерения расстояний;
первый определяющий субмодуль, выполненный с возможностью определения того, больше ли высота препятствия, чем заданное пороговое значение;
первый выявляющий субмодуль, выполненный с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
9. Устройство по п. 7, отличающееся тем, что выявляющий модуль включает:
получающий субмодуль, выполненный с возможностью получения кадра изображения впереди тележки с противовесом с помощью компонента получения изображений;
второй выявляющий субмодуль, выполненный с возможностью выявления препятствия в кадре изображения;
вычисляющий субмодуль, выполненный с возможностью вычисления высоты выявленного препятствия;
второй определяющий субмодуль, выполненный с возможностью определения, больше ли высота препятствия, чем заданное пороговое значение;
третий выявляющий субмодуль, выполненный с возможностью отнесения препятствия к препятствию непреодолимого типа, когда высота препятствия больше, чем заданное пороговое значение.
10. Устройство по п. 7, отличающееся тем, что первый управляющий модуль дополнительно включает:
второй измеряющий субмодуль, выполненный с возможностью измерения расстояния между препятствием и тележкой с противовесом;
третий определяющий субмодуль, выполненный с возможностью определения, меньше ли расстояние, чем заданное расстояние;
первый выполняющий субмодуль, выполненный с возможностью выполнения управления тележкой с противовесом для торможения, когда расстояние меньше, чем заданное пороговое значение.
11. Устройство по п. 7, отличающееся тем, что первый управляющий модуль дополнительно включает модуль оповещения, выполненный с возможностью оповещения о препятствии в заданном режиме, когда препятствие относится к типу непреодолимое препятствие, причем заданный режим оповещения включает, по меньшей мере, одну звуковую сигнализацию в виде вибрации заданной части двухколесной тележки с противовесом и мигание индикаторной лампочки.
12. Устройство по п. 7, отличающееся тем, что дополнительно включает:
оценивающий субмодуль, выполненный с возможностью оценки, существует ли альтернативный путь впереди тележки с противовесом, когда препятствие относится к типу непреодолимое препятствие;
третий управляющий субмодуль, выполненный с возможностью управления тележкой с противовесом для движения по альтернативному пути, когда альтернативный путь существует впереди тележки с противовесом;
первый управляющий модуль, выполненный с возможностью контролирования тележки с противовесом для торможения, когда не существует альтернативный путь впереди тележки с противовесом.
13. Тележка с противовесом, отличающаяся тем, что включает: чип управления, память для хранения инструкций, исполняемых чипом управления, причем чип управления выполнен с возможностью:
выявления типа препятствия впереди тележки с противовесом, включающего непреодолимое препятствие и преодолимое препятствие, путем измерения высоты препятствия впереди тележки с противовесом;
управления тележкой с противовесом для торможения, если препятствие относится к типу непреодолимое препятствие;
увеличения силы тяги для продолжения движения тележки с противовесом, если препятствие относится к типу преодолимое препятствие.
| CN 104443140, 25.03.2015 | |||
| CN 104503450 A, 08.04.2015 | |||
| JP 2007219986 A, 30.08.2007 | |||
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА И СПОСОБ КОРРЕКТИРОВКИ НАПРАВЛЕНИЯ ЕЁ ДВИЖЕНИЯ | 2009 |
|
RU2550560C2 |
| CN 101763119 A, 30.06.2010 | |||
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |

