ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Эта заявка испрашивает преимущество заявки на выдачу китайского патента под № 201511004616.7, поданной 29 декабря 2015 года в Государственном ведомстве по интеллектуальной собственности Китая, раскрытие которой включено в материалы настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится к системе управления направлением движения транспортного средства, способу для ориентирования транспортного средства и инспекционному транспортному средству.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
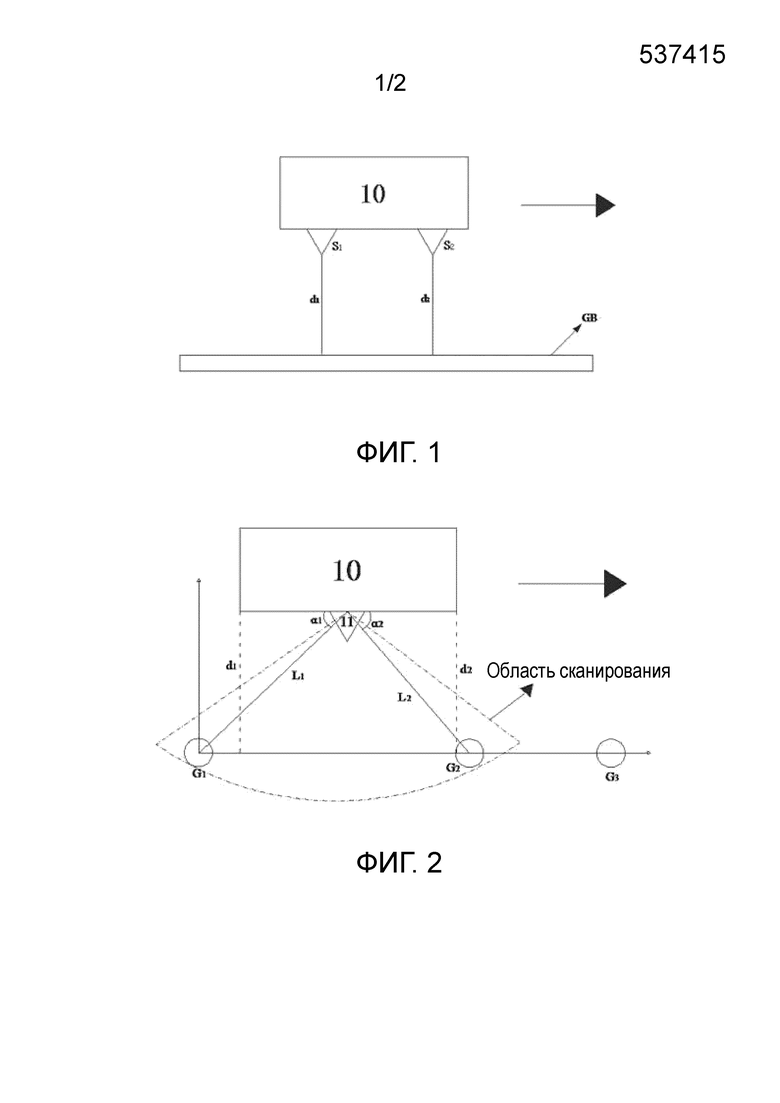
В настоящее время, некоторым специальным транспортным средствам, таким как инспекционные транспортные средства, необходимо выполнять управление направлением движения самостоятельно. Как правило, как показано на фиг. 1, необходимо устанавливать лазер, два лазерных датчика измерения расстояния и набор дефлекторов привязки по одну сторону от этих транспортных средств. Транспортное средство 10ʹ передвигается вдоль направления по стрелке. Перед начальным управлением направлением движения, необходимо заблаговременно устанавливать расстояние между корпусом транспортного средства у транспортного средства 10ʹ и дефлектором GB привязки. Когда транспортное средство 10ʹ для инспекции движется, в соответствии с выходным сигналом с двух датчиков, могут получаться разные расстояния d1 и d2 между транспортным средством для инспекции и дефлектором GB привязки. На основании зависимости между расстояниями d1 и d2, анализируется позиция корпуса транспортного средства. Когда расстояние d1 не равно расстоянию d2, то есть степень отклонения корпуса транспортного средства по отношению к дефлектору привязки или расстояние поперечно смещенного корпуса транспортного средства от воображаемой линии привязки превышает заранее заданный диапазон, система коррекции дает возможность корректировать позицию корпуса транспортного средства посредством приводного механизма, так чтобы корпус транспортного средства перемещался вдоль прямой линии, параллельной дефлектору привязки, то есть расстояние d1 было равным расстоянию d2 или расстояние d1 было близким к расстоянию d2. Когда степень отклонения корпуса транспортного средства по отношению к дефлектору привязки или расстояние поперечно смещенного корпуса транспортного средства от воображаемой линии привязки превышает настраиваемый диапазон, система будет сообщать об ошибке для остановки транспортного средства, чтобы защитить систему сканирования в нем.
Однако в предшествующем уровне техники обычно необходимо устанавливать определенную длину дефлектора привязки. Вследствие разных расстояний перемещения для разных инспекционных транспортных средств, соединенные дефлекторы будут иметь длину от десятков метров вплоть до сотни метров. После каждого изменения расположения этим дефлекторам привязки необходимо устанавливаться заново и неудобно выполнять действия с ними на месте. Поскольку дефлекторы привязки очень громоздки, а их перенос и транспортировка неудобны, они не могут эффективно удовлетворять нужды инспекционных транспортных средств часто переходить с места на место. Такой способ коррекции создает относительно высокое требование к процессу производства и точности установки дефлекторов привязки. То есть, поверхность дефлекторов должна быть плоской и ровной. После соединения дефлекторов, они должны поддерживаться по существу параллельно предопределенной траектории движения транспортного средства. Иначе, оно будет приводить к относительно большой ошибке коррекции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящей заявки предусматривают систему управления направлением движения транспортного средства, которая может преодолевать существующие недостатки системы, и обеспечивают более удобную систему управления направлением движения транспортного средства.
В соответствии с одним из аспектов настоящей заявки, предусмотрена система управления направлением движения транспортного средства, содержащая:
по меньшей мере два отдельных устройства привязки, выполненных с возможностью быть использованными в качестве привязки ориентации транспортного средства;
лазерное сканирующее устройство, выполненное с возможностью испускать лазерный луч и сканировать секторную область лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии для соединения лазерного сканирующего устройства с любым из по меньшей мере двух отдельных устройств привязки и угол, заключенный между соответствующей прямой соединительной линией и корпусом транспортного средства у транспортного средства, или угол, заключенный между прямыми соединительными линиями;
процессор, выполненный с возможностью обрабатывать и сохранять данные;
при этом, процессор определяет, является или нет ориентация корпуса транспортного средства в реальном времени отклоняющейся от начальной ориентации корпуса транспортного средства в момент времени, когда система начинает работать, в соответствии с расстояниями по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки из по меньшей мере двух устройств привязки соответственно, и углом, заключенным между каждыми из прямых соединительных линий и корпусом транспортного средства, или углом, заключенным между прямыми соединительными линиями, в качестве считанных лазерным сканирующим устройством, при этом, начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса транспортного средства относительно прямой соединительной линии между первым отдельным устройством привязки и вторым отдельным устройством привязки, в качестве определенных системой управления направлением движения транспортного средства, когда система начинает работать.
В соответствии с еще одним аспектом настоящей заявки, предусмотрен способ для ориентирования транспортного средства, содержащий:
использование лазерного сканирующего устройства транспортного средства для испускания множества сигналов лазерного луча в направлении по меньшей мере двух отдельных устройств привязки для сканирования секторной области лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии от любого из по меньшей мере отдельных устройств привязки до лазерного сканирующего устройства и угол, заключенный между прямой соединительной линией и корпусом транспортного средства у транспортного средства, или угол, заключенный между прямыми соединительными линиями;
определение того, отклоняется ли ориентация в реальном времени корпуса транспортного средства от начальной ориентации корпуса транспортного средства в момент времени, когда система начинает работать, на основании измеренных расстояний по прямым соединительным линиям от первого отдельного устройства привязки и второго отдельного устройства привязки из по меньшей мере двух отдельных устройств привязки до лазерного сканирующего устройства, и угла, заключенного между прямыми соединительными линиями и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, при этом, начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса транспортного средства по отношению к прямой соединительной линии между первым и вторым отдельными устройствами привязки в качестве определенной системой управления направлением движения транспортного средства, когда система начинает работать.
В соответствии с дополнительным аспектом настоящей заявки, она предусматривает инспекционное транспортное средство для выполнения проверки безопасности объекта, содержащее систему управления направлением движения транспортного средства, как описанная выше, при этом, лазерное сканирующее устройство установлено на боковой стороне инспекционного транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает схематический вид сверху инспекционного транспортного средства из предшествующего уровня техники;
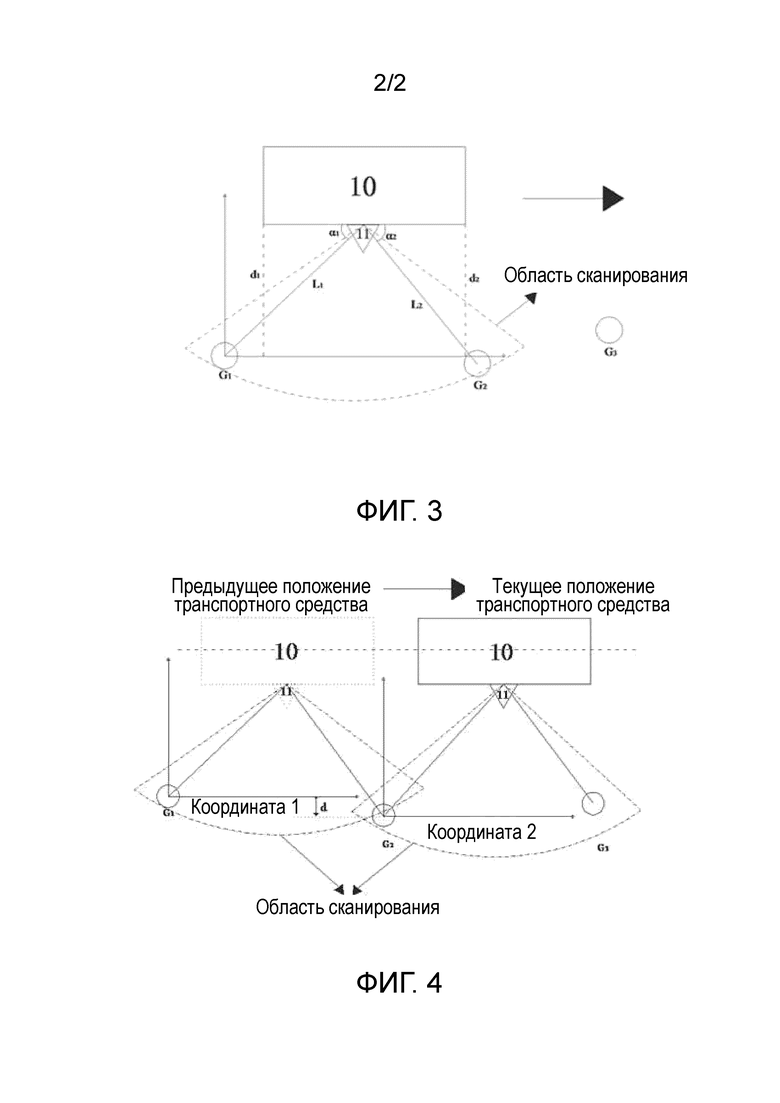
фиг. 2 показывает схематический вид сверху инспекционного транспортного средства согласно настоящей заявке, в котором прямая соединительная линия между устройствами привязки ориентируется параллельно первоначальному корпусу транспортного средства;
фиг. 3 показывает схематический вид сверху инспекционного транспортного средства согласно настоящей заявке, в котором прямая соединительная линия между устройствами привязки ориентируется не параллельно первоначальному корпусу транспортного средства; и
фиг. 4 показывает схематический вид сверху инспекционного транспортного средства в разные моменты времени согласно настоящей заявке, в течение работы которого заканчивается переключение устройств привязки.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с одним из вариантов осуществления настоящей заявки, как показано на фиг. 2, система управления направлением движения транспортного средства включает в себя: по меньшей мере два отдельных устройства привязки для использования в качестве привязки ориентации транспортного средства 10; лазерное сканирующее устройство 11, выполненное с возможностью испускать лазерный луч и сканировать секторную область лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии между лазерным сканирующим устройством и любым из по меньшей мере двух отдельных устройств привязки и угол, заключенный между соответствующей прямой соединительной линией и корпусом транспортного средства у транспортного средства; процессор, выполненный с возможностью обрабатывать и сохранять данные. В настоящем варианте осуществления, процессор определяет, является или нет ориентация корпуса 10 транспортного средства в реальном времени отклоняющейся от начальной ориентации корпуса транспортного средства в момент времени, когда система начинает работать, в соответствии с расстояниями по прямым соединительным линиям L1 и L2 от лазерного сканирующего устройства 11 до первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки из по меньшей мере двух устройств привязки соответственно, и углом α1, α2, заключенным между каждой из прямых соединительных линий L1, L2 и корпусом 10 транспортного средства, или углом, заключенным между прямыми соединительными линиями L1 и L2, в качестве считываемых лазерным сканирующим устройством 11. Начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса 10 транспортного средства по отношению к прямой соединительной линии между первым отдельным устройством G1 привязки и вторым отдельным устройством G2 привязки в качестве определенной системой управления направлением движения транспортного средства, когда система начинает работать.
Фиг. 2 показывает вариант осуществления настоящей заявки. Корпус транспортного средства перемещается вдоль направления, указанного стрелкой, и начальная ориентация корпуса транспортного средства параллельна прямой соединительной линии между первым отдельным устройством G1 привязки и вторым отдельным устройством G2 привязки.
В еще одном варианте осуществления настоящей заявки, для того чтобы содействовать работе системы управления направлением движения транспортного средства, множество отдельных устройств G1, G2, …Gn привязки размещены, чтобы давать прямым соединительным линиям между всеми из отдельных устройств G1, G2, …Gn привязки возможность быть параллельными начальной ориентации корпуса транспортного средства.
Фиг. 3 показывает еще один вариант осуществления настоящей заявки. Корпус транспортного средства перемещается вдоль направления, указанного стрелкой, и начальная ориентация корпуса транспортного средства не параллельна прямой соединительной линии между первым отдельным устройством G1 привязки и вторым отдельным устройством G2 привязки. Другими словами, множество отдельных устройств привязки размещено по существу вдоль направления продления или направления перемещения корпуса транспортного средства. Однако, прямая соединительная линия между отдельными устройствами привязки не параллельна начальной ориентации корпуса транспортного средства. На практике, это может помогать оператору размещать отдельные устройства привязки. Так как никакие строгие измерения при размещении отдельных устройств привязки не нужны, отдельные устройства привязки могут размещаться быстро, исключительно по ощущению.
Лазерное сканирующее устройство может испускать лазерный луч, который может использоваться для сканирования в пределах секторной области. Более конкретно, например, лазерный луч, испускаемый последовательно, осуществляет сканирование от одной стороны, где расположена передняя часть корпуса транспортного средства, до другой стороны, где расположена задняя часть корпуса транспортного средства, с тем чтобы выполнять сканирование в форме сектора. Лазерный луч испускается с интервалами постоянного угла, например, 1 градус, 0,5 градуса или меньшего угла, с тем чтобы покрывать область перед корпусом транспортного средства. В одном из вариантов осуществления настоящей заявки, лазерный луч непрерывно испускается с интервалом в 1 градус, с тем чтобы покрывать область секторной формы или центральный угловой диапазон в 180 градусов. Поскольку лазерный луч может испускаться последовательно и отражаться в пределах интервала постоянного угла, угол каждого лазерного луча по отношению к корпусу транспортного средства может определяться на основании номера лазерного луча. Например, когда лазерный луч испускается некоторым образом с интервалом в 1 градус, если лазерный луч испускается в шестидесятый раз, чтобы подсвечивать устройство привязки, то угол, заключенный между прямой соединительной линией L1 или L2 от лазерного сканирующего устройства до устройства привязки и корпусом транспортного средства, имеет значение 60 градусов. Таким образом, лазерное сканирующее устройство может измерять длины прямых соединительных линий L1, L2 от лазерного сканирующего устройства до первого устройства привязки и второго устройства привязки соответственно, углы, заключенные между прямыми соединительными линиями L1, L2 и корпусом транспортного средства соответственно, или угол, заключенный между прямыми соединительными линиями L1, L2. Способ работы лазерного сканирующего устройства может быть применен к любому из вариантов осуществления настоящей заявки. Для краткости, часть вариантов осуществления настоящей заявки не обсуждает повторно способ работы лазерного сканирующего устройства, как описанное выше. Однако, должно быть понятно, что, в каждом варианте осуществления настоящей заявки, лазерное сканирующее устройство может работать таким образом, как описано выше.
Когда лазерное сканирующее устройство испускает лазерный свет и сканирование выполняется в пределах секторной области, отдельные устройства привязки могут быть размещены относительно произвольно в определенной области, и нет строгого требования к разнесению между устройствами G1, G2, …Gn привязки, пока можно гарантировать, что по меньшей мере два устройства привязки могут быть покрыты секторной областью. В соответствии с вариантом осуществления настоящей заявки, лазерное сканирующее устройство 11 принимает данные лазерного сигнала, отраженного устройством привязки, которое должно измеряться. На основании этих данных, могут измеряться и рассчитываться расстояния между лазерным сканирующим устройством 11 и каждым из устройств G1, G2, …Gn привязки, и угол, заключенный между двумя лазерными лучами, может рассчитываться посредством распознавания интервала (угла) между двумя лазерными лучами с помощью датчика. Например, как показано на фиг. 3, лазерное сканирующее устройство 11 прикреплено к корпусу 10 транспортного средства. После установки датчика, он будет сохраняться параллельным корпусу транспортного средства посредством механического механизма ограничения. Лазерное сканирующее устройство 11 может измерять длины (расстояния) прямых соединительных линий L1, L2 от устройства привязки до датчика, а угол α1, заключенный между прямой соединительной линией L1 от лазерного сканирующего устройства 11 до первого устройства G1 привязки и корпусом транспортного средства, и угол α2, заключенный между прямой соединительной линией L2 от лазерного сканирующего устройства 11 до второго устройства G2 привязки и корпусом транспортного средства, могут определяться посредством анализа углового интервала и отраженного лазерного луча по отношению к корпусу транспортного средства. Согласно формуле расчета по тригонометрической функции, могут рассчитываться перпендикулярные расстояния между двумя устройствами привязки и корпусом транспортного средства соответственно. В настоящем варианте осуществления, перпендикулярные расстояния от корпуса транспортного средства до двух устройств привязки соответственно, являются разными. В соответствии с вариантом осуществления настоящей заявки, два отдельных устройства привязки или больше, чем два отдельных устройства привязки могут использоваться по мере того, как меняется расстояние перемещения. Система управления направлением движения транспортного средства в соответствии с одним из вариантов осуществления настоящей заявки может ориентировать транспортное средство посредством использования отдельных устройств привязки, которые размещены произвольно, как показано на фиг. 3, которая будет подробно пояснена ниже. Следует отметить, что термины «первый», «второй», «третий» и «четвертый», используемые в материалах настоящей заявки, предназначены скорее для указания разных элементов, нежели для ограничения важности или последовательности размещения элементов, или относительного расположения в пространстве.
Система управления направлением движения транспортного средства в соответствии с одним из вариантов осуществления настоящей заявки показана на фиг. 3, взяв только два отдельных устройства G1, G2 привязки в качестве примера ради упрощенного описания. Перед приведением в действие системы, сначала она может быть инициализирована, то есть, может происходить «калибровка привязки». Процессор повторно считывает соответствующие расстояния по прямым соединительным линиям L1, L2 от лазерного сканирующего устройства 11 до первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки, которые закреплены, и рассчитывает углы α1、α2, заключенные между корпусом транспортного средства и прямыми соединительными линиями L1, L2 соответственно, анализируя угловые интервалы отраженного лазерного луча по отношению к корпусу транспортного средства. Согласно приведенным выше известным параметрам, система будет устанавливать прямоугольную систему координат, в которой G1 рассматривается в качестве начала координат, воображаемая линия, проходящая через G1 и параллельная корпусу транспортного средства, рассматривается в качестве оси X, а еще одна воображаемая линия, которая проходит через G1 и перпендикулярна корпусу транспортного средства, рассматривается в качестве оси Y. Процессор может рассчитывать позиционную координату точки G2 привязки и позиционную координату датчика, и сохранять их. Такие данные являются калибровочными данными. Система управления направлением движения в соответствии с вариантом осуществления настоящей заявки строит воображаемую прямоугольную систему координат, используя данные, измеренные лазерным датчиком области. В такой воображаемой прямоугольной системе координат, калибруются позиционная координата исходного начала G1 координат, позиционная координата лазерного датчика области и позиционная координата устройства G2 привязки, близкого к устройству G1 привязки, где расположено начало координат, и контроллер сохраняет информацию инициализации системы. Специалисту в данной области техники следует принимать во внимание, что позиционная координата исходного начала G1 координат, позиционная координата лазерного датчика области и позиционная координата устройства G2 привязки, близкого к устройству G1 привязки, где расположено начало координат, коррелированы друг с другом и, когда ориентация корпуса транспортного средства отклоняется, ось X воображаемой прямоугольной системы координат будет изменяться соответствующим образом и, таким образом, также будет изменяться воображаемая прямоугольная система координат. Другими словами, когда позиционные координаты первого устройства G1 привязки и второго устройства G2 привязки изменяются, воображаемая прямоугольная система координат будет изменяться, так как первое устройство привязки и второе устройство привязки неподвижны с точки зрения положения, а воображаемая прямоугольная система координат будет изменяться вследствие изменения ориентации корпуса транспортного средства. В одном из вариантов осуществления настоящей заявки, во время процесса вождения, система управления направлением движения транспортного средства определяет позиционные координаты первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки посредством измерения в любой момент времени расстояний по прямой соединительной линии L1 от лазерного сканирующего устройства 11 до первого отдельного устройства привязки и прямой соединительной линии L2 от лазерного сканирующего устройства 11 до второго отдельного устройства привязки соответственно, углов, заключенных между прямыми соединительными линиями L1, L2 и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями L1, L2. Если позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки поддерживаются постоянными, ориентация корпуса транспортного средства сохраняется постоянной.
В еще одном варианте осуществления настоящей заявки, во время процесса вождения, система будет разрешать координаты в реальном времени лазерного сканирующего устройства 11 и получать ориентацию и положения в реальном времени корпуса транспортного средства, сравнивая каждое из них с калибровочной координатой и анализируя и рассчитывая результаты сравнения. Когда ориентация корпуса транспортного средства расположена в определенном диапазоне от порогового значения, траектория движения корпуса транспортного средства будет по существу совпадать с осью X базовой системы координат. И тогда направление вождения не будет корректироваться, рулевое колесо будет находиться в состоянии возврата и корпус транспортного средства будет перемещаться вдоль исходного направления. Когда траектория перемещения отклоняется от направления оси X базовой системы координат, система будет управлять уровнем настройки рулевого колеса на основании направления отклонения и степени отклонения корпуса транспортного средства. Между тем, информация о коррекции будет возвращаться, так чтобы вся система управления направлением движения транспортного средства находилась в пределах регулирования по замкнутому контуру. Это дает возможность точнее корректировать направление перемещения, тем самым, настраивая позицию и положение корпуса транспортного средства.
Что касается системы управления направлением движения транспортного средства в соответствии с вариантом осуществления настоящей заявки, когда система начинает работать, процессор определяет и сохраняет углы α1、α2, соответственно заключенные между исходной воображаемой линией и соединительными линиями между первым отдельным устройством G1 привязки и вторым отдельным устройством G2 привязки, и рассчитывает перпендикулярные расстояния передней части транспортного средства и задней части транспортного средства от линии привязки соответственно, по алгоритму. Фиг. 4 показывает случай, в котором соединительная линия между двумя устройствами привязки не параллельна корпусу транспортного средства в начале (транспортное средство перемещается вдоль направления, указанного стрелкой). В этом случае, воображаемая линия, продолжающаяся через G1 и параллельная направлению корпуса транспортного средства, не совпадает с другой воображаемой линией, продолжающейся через G2 и параллельной направлению корпуса транспортного средства, то есть, в системе координат, в которой G1 рассматривается в качестве начала координат, G1 и G2 имеют разные продольные координаты. В соответствии с вариантом осуществления настоящей заявки, когда система калибруется сначала, процессор регистрирует координаты точек привязки, близких к началу координат, то есть, позиционная координата точки G1 имеет значение (0, 0), а позиционная координата точки G2 имеет значение (△x,△y), тем временем, △y является ненулевым. При анализе расстояний передней части и задней части транспортного средства от линии привязки, величина △y смещения точки G2 относительно точки G1 компенсируется алгоритмом. Таким образом, обеспечивается, что, во время процесса перемещения, корпус транспортного средства всегда остается движущимся вдоль оси X на постоянном расстоянии от воображаемой линии, которая продолжается через G1 и параллельна направлению корпуса транспортного средства, то есть, корпус транспортного средства всегда остается движущимся вдоль оси X с расстоянием между G1 и корпусом транспортного средства, когда корпус транспортного средства калиброван.
Поскольку воображаемая базовая система координат определена, во время процесса вождения транспортного средства 10 можно определять, отклоняется или нет транспортное средство 10 от начального направления, на основании воображаемой базовой системы координат. В одном из вариантов осуществления, во время процесса перемещения транспортного средства 10, позиционная координата в реальном времени датчика в воображаемой базовой системе координат может определяться посредством измерения расстояний в реальном времени по прямым соединительным линиям L1, L2 от лазерного сканирующего устройства 11 до первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки соответственно, и углов в реальном времени, заключенных между прямыми соединительными линиями L1, L2 и корпусом транспортного средства соответственно, с помощью лазерного сканирующего устройства 11. Позиционные координаты передней части и задней части рассчитываются на основании положения в реальном времени(α1、α2), где датчик расположен в пределах корпуса транспортного средства и, таким образом, расстояния положения (α1、α2)от передней части и задней части транспортного средства соответственно, тем самым, рассчитывая позицию и положение корпуса транспортного средства. Положение в реальном времени транспортного средства 10 сравнивается с начальным калиброванным положением, с тем чтобы определять направление отклонения и величину смещения корпуса транспортного средства.
В соответствии с вариантом осуществления настоящей заявки, когда расстояние перемещения очень велико, в то время как транспортное средство 10 непрерывно передвигается, лазерное сканирующее устройство 11 становится находящимся все дальше и дальше от первого и второго отдельных устройств привязки, в это время можно предусматривать третье, четвертое или дополнительные устройства привязки, чтобы продолжать операцию управления направлением движения транспортного средства. Другими словами, система управления направлением движения транспортного средства включает в себя множество устройств привязки, которые могут давать секторной области, сканируемой лазерным сканирующим устройством 11, возможность покрывать два устройства привязки, с тем чтобы выполнять управление направлением движения транспортного средства, и продолжать последовательность операций управления направлением движения транспортного средства по мере того, как транспортное средство движется. Когда привязка выходит из диапазона, покрытого секторной областью сканирования лазерного сканирующего устройства 11, система будет утрачивать подачу данных измерений. В это время, необходимо добавлять новую привязку, и расширение устройств привязки будет достигаться посредством переключения устройств привязки, тем самым, удлиняя маршрут навигации системы для корпуса транспортного средства. Как показано на фиг. 4, данный вариант осуществления настоящей заявки предусматривает третье отдельное устройство привязки. Когда расстояние перемещения транспортного средства 10 является возрастающим, количество отдельных устройств привязки может непрерывно добавляться. В соответствии с вариантом осуществления настоящей заявки, принцип работы для управления направлением движения транспортного средства со вторым отдельным устройством привязки и третьим отдельным устройством привязки идентичен таковому с первым устройством привязки и вторым устройством привязки, как описано выше.
В одном из вариантов осуществления настоящей заявки, когда транспортное средство 10 проезжает определенное расстояние, система будет определять, что лазерное сканирующее устройство 11 находилось слишком далеко от первого отдельного устройства привязки и второго отдельного устройства привязки. В это время, она будет осуществлять переключение, с тем чтобы использовать второе отдельное устройство привязки и третье отдельное устройство привязки в качестве используемых на данный момент двух точек привязки, тем самым, обеспечивая достоверность данных. Лазерное сканирующее устройство 11 продолжает работать описанным выше образом. По расстояниям по прямым соединительным линиям от лазерного сканирующего устройства 11 до второго отдельного устройства G2 привязки и третьего отдельного устройства G3 привязки соответственно, и углам, заключенным между корпусом транспортного средства и прямыми соединительными линиями, процессор устанавливает систему координат, в которой точка G2 рассматривается в качестве начала координат, а воображаемая линия, продолжающаяся через точку G2 и параллельная направлению корпуса транспортного средства в начальный момент времени, рассматривается в качестве оси X. На основании значений координат G2, измеренных в системе координат, в которой G2 используется в качестве начала координат, координата лазерного сканирующего устройства 11 в системе координат, в которой G2 используется в качестве ее начала координат, будет корректироваться один раз, с тем чтобы гарантировать, что в других системах координат, координаты для того же самого положения корпуса транспортного средства будут рассчитываться идентичными. Тем временем, позиция и положение корпуса транспортного средства, рассчитанные в этой системе координат, будут сохраняться. Таким образом, производится одно переключение и, впоследствии, переключение будет продолжаться по мере того, как возрастает расстояние перемещения корпуса транспортного средства.
После того, как корпус транспортного средства заканчивает одиночное перемещение вдоль того же самого направления, когда корпус транспортного средства передвигается вдоль противоположного направления, система будет реализовывать измерение и вызывать информацию о координатах устройства привязки во время перемещения вперед, с тем чтобы выполнять сопоставление с положением корпуса транспортного средства во время перемещения вперед, тем самым, устраняя накопление ошибки в наибольшей степени.
В еще одном варианте осуществления настоящей заявки, когда система управления направлением движения транспортного средства управляет направлением движения транспортного средства вновь посредством использования второго отдельного устройства G2 привязки и отдельного третьего устройства G3 привязки, переходное состояние корпуса транспортного средства используется в качестве начального состояния, и воображаемая прямоугольная система координат, в которой второе отдельное устройство G2 привязки рассматривается в качестве начала координат, определяется некоторым образом, подобным последовательности операций использования первого и второго отдельных устройств G1 и G2 привязки, как описано выше, и тем самым, координаты второго и третьего отдельных устройств G2 и G3 привязки, а также лазерного сканирующего устройства 11, рассчитываются в новой воображаемой прямоугольной системе координат, в которой второе отдельное устройство G2 привязки рассматривается в качестве начала координат. Другими словами, транспортное средство также может направляться независимо от параметров в пределах прямоугольной системы координат, в которой первое отдельное устройство G1 привязки используется в качестве начала координат. Тем временем, позиция и положение корпуса транспортного средства, рассчитанные в этой системе координат, будут сохраняться. Таким образом, одно переключение производится таким алгоритмом, а последующее переключение будет продолжаться по мере того, как возрастает расстояние перемещения корпуса транспортного средства. После того, как корпус транспортного средства заканчивает одиночное перемещение вдоль того же самого направления, когда корпус транспортного средства передвигается вдоль противоположного направления, система будет вызывать информацию о координатах устройства или точки привязки во время перемещения вперед, с тем чтобы выполнять сопоставление с положением корпуса транспортного средства во время перемещения вперед на основании выявления алгоритма, тем самым, устраняя накопление ошибки в наибольшей степени.
В соответствии с вариантом осуществления настоящей заявки, начальная ориентация корпуса транспортного средства, используемая в материалах настоящей заявки, не ограничена ориентацией корпуса транспортного средства, когда транспортное средство начинает двигаться в начале. Из вышеприведенного описания будет понятно, что начальная ориентация корпуса транспортного средства может быть ориентацией корпуса транспортного средства в любой момент времени. Когда ориентация корпуса транспортного средства в определенный момент времени используется в качестве начальной ориентации, система управления направлением движения транспортного средства может измерять последующую ориентацию корпуса транспортного средства и корректировать или управлять ориентацией корпуса транспортного средства. Поэтому, может быть понятно, что система управления направлением движения транспортного средства по настоящему варианту осуществления может измерять, отклоняется ли ориентация корпуса транспортного средства в следующий момент времени от ориентации корпуса транспортного средства в предыдущий момент времени.
В одном из вариантов осуществления настоящей заявки, предусмотрен способ для ориентирования транспортного средства, включающий в себя этапы: использования лазерного сканирующего устройства 11 транспортного средства для испускания множества сигналов лазерного луча в направлении по меньшей мере двух отдельных устройств привязки для сканирования секторной области лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии от любого из по меньшей мере двух отдельных устройств привязки до лазерного сканирующего устройства 11 и угол, заключенный между прямой соединительной линией и корпусом транспортного средства, или угол, заключенный между прямыми соединительными линиями. Способ также включает в себя определение, отклоняется ли ориентация в реальном времени корпуса 10 транспортного средства от начальной ориентации корпуса транспортного средства, когда система начинает работать, на основании измеренных расстояний по прямым соединительным линиям L1, L2 от первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки из по меньшей мере отдельных устройств привязки до лазерного сканирующего устройства, и угла между прямыми соединительными линиями L1, L2 и корпусом транспортного средства или угла между прямыми соединительными линиями L1, L2. Начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса 10 транспортного средства по отношению к прямым соединительным линиям первого и второго отдельных устройств G1, G2 привязки в качестве определенной системой управления направлением движения транспортного средства, когда система начинает работать.
Более конкретно, когда система начинает работать, процессор будет определять и сохранять начальную ориентацию корпуса транспортного средства на основании расстояний по прямым соединительным линиям L1, L2 от первого отдельного устройства G1 привязки и второго отдельного устройства G2 привязки до лазерного сканирующего устройства 11 соответственно, и угла, заключенного между прямыми соединительными линиями L1, L2 и корпусом 10 транспортного средства, или угла, заключенного между прямыми соединительными линиями L1, L2, в качестве измеренных лазерным сканирующим устройством 11; и, тем самым, определять позиционные координаты второго отдельного устройства привязки и лазерного сканирующего устройства в прямоугольной системе координат, в которой первое отдельное устройство G1 привязки используется в качестве начала координат, при этом, одна ось прямоугольной системы координат параллельна начальной ориентации корпуса 10 транспортного средства.
Лазерное сканирующее устройство 11 испускает лазерный луч последовательно с определенным угловым интервалом, с тем чтобы определять угол каждого испускаемого лазерного луча по отношению к корпусу 10 транспортного средства, тем самым, определяя угол, определенный между лазерным лучом, отраженным устройством привязки, и корпусом 10 транспортного средства.
В одном из вариантов осуществления настоящей заявки, позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки определяются посредством измерения в любой момент времени расстояний по прямой соединительной линии L1 от лазерного сканирующего устройства 11 до первого отдельного устройства G1 привязки и по прямой соединительной линии L2 от лазерного сканирующего устройства 11 до второго отдельного устройства G2 привязки, углов, заключенных между прямыми соединительными линиями L1, L2 и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями L1, L2. Если позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки остаются постоянными, ориентация корпуса транспортного средства не изменяется.
В еще одном варианте осуществления настоящей заявки, способ для ориентирования транспортного средства включает в себя: определение координат в реальном времени лазерного сканирующего устройства 11 посредством измерения в любой момент времени расстояний по прямой соединительной линии L1 от лазерного сканирующего устройства 11 до первого отдельного устройства G1 привязки и по прямой соединительной линии L2 от лазерного сканирующего устройства 11 до второго отдельного устройства G2 привязки, углов, заключенных между прямыми соединительными линиями L1, L2 и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями L1, L2, тем самым, получая ориентацию и положения в реальном времени корпуса 10 транспортного средства.
В еще одном варианте осуществления настоящей заявки, способ для ориентирования транспортного средства включает в себя: предоставление третьего устройства привязки и определение системой управления направлением движения транспортного средства, отклоняется ли ориентация в реальном времени корпуса 10 транспортного средства от начальной ориентации корпуса транспортного средства, на основании расстояний по прямой соединительной линии от лазерного сканирующего устройства 11 до третьего отдельного устройства G3 привязки и по прямой соединительной линии от лазерного сканирующего устройства 11 до второго отдельного устройства G2 привязки соответственно, углов, заключенных между прямыми соединительными линиями и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, в качестве считанных лазерным сканирующим устройством 11.
В еще одном варианте осуществления настоящей заявки, способ для ориентирования транспортного средства включает в себя: предоставление множества устройств привязки и управление направлением движения транспортного средства 10 посредством использования двух устройств привязки, которые покрыты секторной областью, сканируемой лазерным сканирующим устройством 11, тем самым непрерывно выполняя последовательность операций для управления направлением движения транспортного средства.
В одном из вариантов осуществления настоящей заявки, инспекционное транспортное средство 10 для выполнения проверки безопасности объекта, включающее в себя систему управления направлением движения транспортного средства, как описанная выше, в которой лазерное сканирующее устройство 11 установлено на боковой стороне инспекционного транспортного средства 10.
По сравнению с дефлектором привязки предусмотрено множество отдельных устройств привязки, с тем чтобы значительно сокращать время для их установки и настройки. Количество отдельных устройств привязки может гибко выбираться, их объем является меньшим и они могут удобно транспортироваться, так чтобы они могли удовлетворять потребность в переводе транспортного средства между разными расположениями. Нет высокой точности установки для отдельных устройств привязки. Например, даже если два цилиндрических устройства привязки не установлены строго в соответствии с воображаемой линией привязки, может быть рассчитана относительная ошибка. Таким образом, принимая во внимание относительную ошибку, могут распознаваться положение и позиция корпуса транспортного средства.
Система управления направлением движения транспортного средства включает в себя два отдельных устройства привязки; лазерное сканирующее устройство, выполненное с возможностью испускать сигналы лазерного луча и сканировать секторную область лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии для соединения лазерного сканирующего устройства с любым из по меньшей мере двух отдельных устройств привязки и угол между соответствующей прямой соединительной линией и корпусом транспортного средства у транспортного средства или угол между прямыми соединительными линиями; процессор, выполненный с возможностью обрабатывать и сохранять данные и определять, является или нет ориентация корпуса транспортного средства в реальном времени отклоняющейся от начальной ориентации корпуса транспортного средства сразу после того, как система начинает работать, в соответствии с результатами, считанными лазерным сканирующим устройством. Упрощается управление направлением движения транспортного средства. 2 н. и 12 з.п. ф-лы, 4 ил.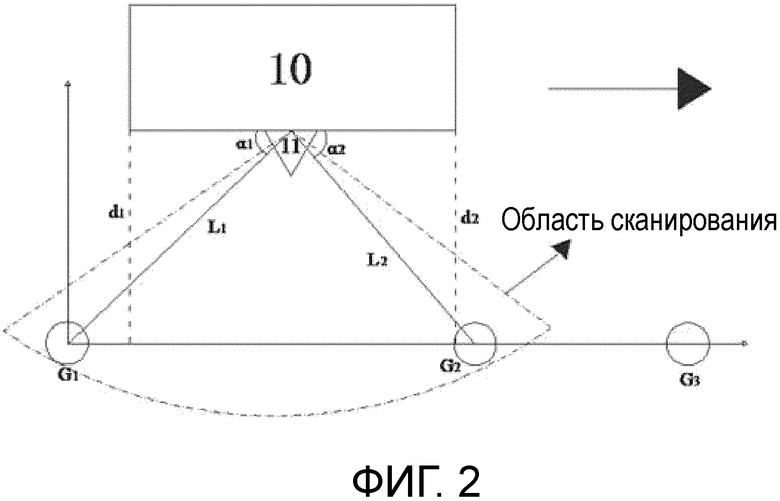
1.Система управления направлением движения транспортного средства, содержащая:
по меньшей мере два отдельных устройства привязки, выполненных с возможностью быть использованными в качестве привязки ориентации транспортного средства;
лазерное сканирующее устройство, выполненное с возможностью испускать лазерный луч и сканировать секторную область лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии для соединения лазерного сканирующего устройства с любым из по меньшей мере двух отдельных устройств привязки и угол, заключенный между соответствующей прямой соединительной линией и корпусом транспортного средства у транспортного средства, или угол, заключенный между прямыми соединительными линиями;
процессор, выполненный с возможностью обрабатывать и сохранять данные;
при этом процессор определяет, является или нет ориентация корпуса транспортного средства в реальном времени отклоняющейся от начальной ориентации корпуса транспортного средства в момент времени, когда система начинает работать, в соответствии с расстояниями по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки из по меньшей мере двух устройств привязки соответственно, и углом, заключенным между каждыми из прямых соединительных линий и корпусом транспортного средства, или углом, заключенным между прямыми соединительными линиями, в качестве считанных лазерным сканирующим устройством, при этом начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса транспортного средства относительно прямой соединительной линии между первым отдельным устройством привязки и вторым отдельным устройством привязки, в качестве определенных системой управления направлением движения транспортного средства, когда система начинает работать.
2. Система управления направлением движения транспортного средства по п. 1, в которой процессор выполнен с возможностью:
определять и сохранять начальную ориентацию корпуса транспортного средства, когда система начинает работать, на основе расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, и угла, заключенного между прямыми соединительными линиями, измеренных лазерным сканирующим устройством;
устанавливать прямоугольную систему координат с первым отдельным устройством привязки в качестве начала координат; и
определять позиционные координаты второго отдельного устройства привязки и лазерного сканирующего устройства, при этом ось прямоугольной системы координат параллельна начальной ориентации корпуса транспортного средства у транспортного средства.
3. Система управления направлением движения транспортного средства по п. 1, в которой лазерное сканирующее устройство способно определять угол каждого испускаемого лазерного луча по отношению к корпусу транспортного средства посредством лазерных лучей, которые испускаются последовательно с определенным угловым интервалом, так чтобы определялся угол, определенный между лазерным лучом, отраженным устройством привязки, и корпусом транспортного средства.
4. Система управления направлением движения транспортного средства по п. 2, в которой система управления направлением движения транспортного средства определяет позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки посредством измерения в любой момент времени расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями; и, если позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки остаются постоянными, ориентация корпуса транспортного средства не изменяется.
5. Система управления направлением движения транспортного средства по п. 2, при этом система управления направлением движения транспортного средства определяет координаты в реальном времени лазерного сканирующего устройства посредством измерения в любой момент времени расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, тем самым получая ориентацию и положения в реальном времени корпуса транспортного средства.
6. Система управления направлением движения транспортного средства по п. 2, при этом система управления направлением движения транспортного средства дополнительно содержит третье устройство привязки и определяет, является или нет ориентация в реальном времени корпуса транспортного средства отклоняющейся от начальной ориентации корпуса транспортного средства, на основе расстояний по прямой соединительной линии от лазерного сканирующего устройства до третьего устройства привязки и второго устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, в качестве считываемых лазерным сканирующим устройством.
7. Система управления направлением движения транспортного средства по п. 6, при этом система управления направлением движения транспортного средства содержит множество устройств привязки и дает возможность управлять направлением движения транспортного средства посредством использования двух из множества устройств привязки, которые покрыты секторной областью, сканируемой лазерным сканирующим устройством, и непрерывно выполнять последовательность операций для управления направлением движения транспортного средства по мере того, как транспортное средство движется.
8. Способ для ориентирования транспортного средства, состоящий в том, что:
используют лазерное сканирующее устройство транспортного средства для испускания лазерных лучей в направлении по меньшей мере двух отдельных устройств привязки для сканирования секторной области лазерным лучом, с тем чтобы измерять расстояние по прямой соединительной линии от любого из по меньшей мере отдельных устройств привязки до лазерного сканирующего устройства и угол, заключенный между прямой соединительной линией и корпусом транспортного средства у транспортного средства, или угол, заключенный между прямыми соединительными линиями;
определяют, отклоняется ли ориентация в реальном времени корпуса транспортного средства от начальной ориентации корпуса транспортного средства в момент времени, когда система начинает работать, на основании измеренных расстояний по прямым соединительным линиям от первого отдельного устройства привязки и второго отдельного устройства привязки из по меньшей мере двух отдельных устройств привязки до лазерного сканирующего устройства, и угла, заключенного между прямыми соединительными линиями и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, при этом начальная ориентация корпуса транспортного средства подразумевается ориентацией корпуса транспортного средства по отношению к прямой соединительной линии между первым и вторым отдельными устройствами привязки в качестве определенных системой управления направлением движения транспортного средства, когда система начинает работать.
9. Способ по п. 8, дополнительно содержащий этапы, на которых:
когда система начинает работать, процессор выполнен с возможностью:
определять и сохранять начальную ориентацию корпуса транспортного средства на основе расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, измеренных лазерным сканирующим устройством;
устанавливать прямоугольную систему координат с первым отдельным устройством привязки в качестве начала координат; и
определять позиционные координаты второго отдельного устройства привязки и лазерного сканирующего устройства, при этом ось прямоугольной системы координат параллельна начальной ориентации корпуса транспортного средства у транспортного средства.
10. Способ по п. 9, в котором лазерное сканирующее устройство способно определять угол каждого испускаемого лазерного луча по отношению к корпусу транспортного средства посредством лазерных лучей, которые испускаются последовательно с определенным угловым интервалом, так чтобы определялся угол, определенный между лазерным лучом, отраженным устройством привязки, и корпусом транспортного средства.
11. Способ по п. 9, дополнительно содержащий этапы, на которых определяют позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки посредством измерения в любой момент времени расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями; когда позиционные координаты первого отдельного устройства привязки и второго отдельного устройства привязки остаются постоянными, ориентация корпуса транспортного средства не изменяется.
12. Способ по п. 9, дополнительно содержащий этапы, на которых определяют координаты в реальном времени лазерного сканирующего устройства посредством измерения в любой момент времени расстояний по прямым соединительным линиям от лазерного сканирующего устройства до первого отдельного устройства привязки и второго отдельного устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, тем самым получая ориентацию и положения в реальном времени корпуса транспортного средства.
13. Способ по п. 9, дополнительно содержащий этапы, на которых предусматривают третье устройство привязки, и система управления направлением движения транспортного средства определяет, является или нет ориентация в реальном времени корпуса транспортного средства отклоняющейся от начальной ориентации корпуса транспортного средства, на основе расстояний по прямой соединительной линии от лазерного сканирующего устройства до третьего устройства привязки и второго устройства привязки соответственно, и угла, заключенного между каждой из прямых соединительных линий и корпусом транспортного средства, или угла, заключенного между прямыми соединительными линиями, в качестве считанных лазерным сканирующим устройством.
14. Способ по п. 13, дополнительно состоящий из множества устройств привязки и заключающийся в том, что управляют направлением движения транспортного средства посредством использования двух из множества устройств привязки, которые покрыты секторной областью, сканируемой лазерным сканирующим устройством, тем самым непрерывно выполняя последовательность операций для управления направлением движения транспортного средства по мере того, как транспортное средство движется.
| DE 3930109 C1, 15.11.1990 | |||
| RU 2013151093 A, 27.05.2015 | |||
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2495797C2 |

