Данное изобретение относится к авиационной технике, в частности к системе управления тормозом несущего винта, и может применяться, к примеру, в вертолетах классической схемы.
Известно устройство контроля состояния тормоза несущего винта вертолета (патент DE 19541193, В64С 27/12, опубл. 14.11.1996 г.), которое снабжено индикатором для пилота и микровыключателем, размещенным вблизи тормозных колодок. Тормозные колодки установлены на валу несущего винта и связаны с картером коробки передач подпружиненным опорным рычагом. В корпус картера под опорным рычагом встроен микровыключатель. После подачи сигнала на торможение колодки перемещаются вдоль оси вращения тормозного диска и прижимаются к нему. При этом происходит смещение опорного рычага, связанного с колодками, он давит на пружину и одновременно на кнопку выключателя. Пилот получает сигнал о заторможенном состоянии ротора. Когда колодки подняты, опорный рычаг также приподнят, пружина выпрямлена, а за счет этого кнопка выключателя отпущена. В этом случае пилот получает сигнал о расторможенном состоянии.
Однако данное устройство применяется в дисковой тормозной системе.
Известна система управления тормозом трансмиссии, наиболее близкая к заявляемому техническому решению, («Вертолет Ми-6. Техническое описание», - М.: Оборонгиз. - 1963 г., с. 112-113, 139-140, фиг. 202, 248), состоящая из ручки управления тормозом, которая размещена в кабине пилота и связана посредством троса с тормозными колодками. Управление тормозом сблокировано с системой запуска двигателей, в результате чего запуск возможен только при полностью расторможенной трансмиссии, т.е., когда ручка находится в крайнем нижнем положении. При таком положении размещенный на ручке концевой выключатель замыкает электрическую цепь системы запуска двигателей. В данной конструкции положение ручки управления указывает пилоту о состоянии тормозной системы несущего винта.
Недостатком такой конструкции является возможная недостоверность информации о заторможенном или расторможенном состоянии тормоза, так как движение тормозных колодок может не следовать управляющему усилию, поданному с помощью ручки управления, например, из-за аварийного обрыва тросовой цепи управления, идущей из кабины к рычагу управления колодками.
Целями предлагаемого технического решения является информирование пилота о состоянии (заторможенном или расторможенном) тормоза несущего винта даже в случае аварийного обрыва троса, соединяющего ручку управления с колодками тормоза, и повышение ситуационной осведомленности пилота согласно Авиационным правилам АП-29 от 2003 г.
Технический результат достигается благодаря тому, что в системе управления тормозом несущего винта, содержащей ручку управления и выключатель, размещенные в кабине экипажа, причем ручка связана с колодками тормоза несущего винта посредством троса и системы рычагов, в соответствии с предлагаемым изобретением на кронштейне тормоза несущего винта закреплены установочный кронштейн и кронштейн механизма качения, при этом на кронштейне механизма качения жестко установлена пружина, накрученная на ось и поддерживающая нажимной рычаг, а на установочном кронштейне закреплен микровыключатель.
Причем установочный кронштейн выполнен с двумя вырезами, снабжен отверстием и закреплен болтами на кронштейне тормоза несущего винта. Кроме того, ось механизма качения выполнена в виде металлического стержня с головкой с одной стороны и сквозным поперечным отверстием с другой стороны.
Размещение на кронштейне тормоза несущего винта дополнительного установочного кронштейна с закрепленным на нем микровыключателем направлено на реализацию средства информирования пилота о состоянии (заторможенном или расторможенном) тормоза несущего винта даже в случае аварийного обрыва троса, соединяющего ручку управления с колодками тормоза, а также на повышение ситуационной осведомленности пилота. Нажимной рычаг механизма качения, встроенного в тормозную систему, принимает управляющее усилие от ручки управления посредством троса и воздействует на микровыключатель, включая или выключая его кнопку.
Система управления тормозом несущего винта летательного аппарата изображена на чертежах, где показаны:
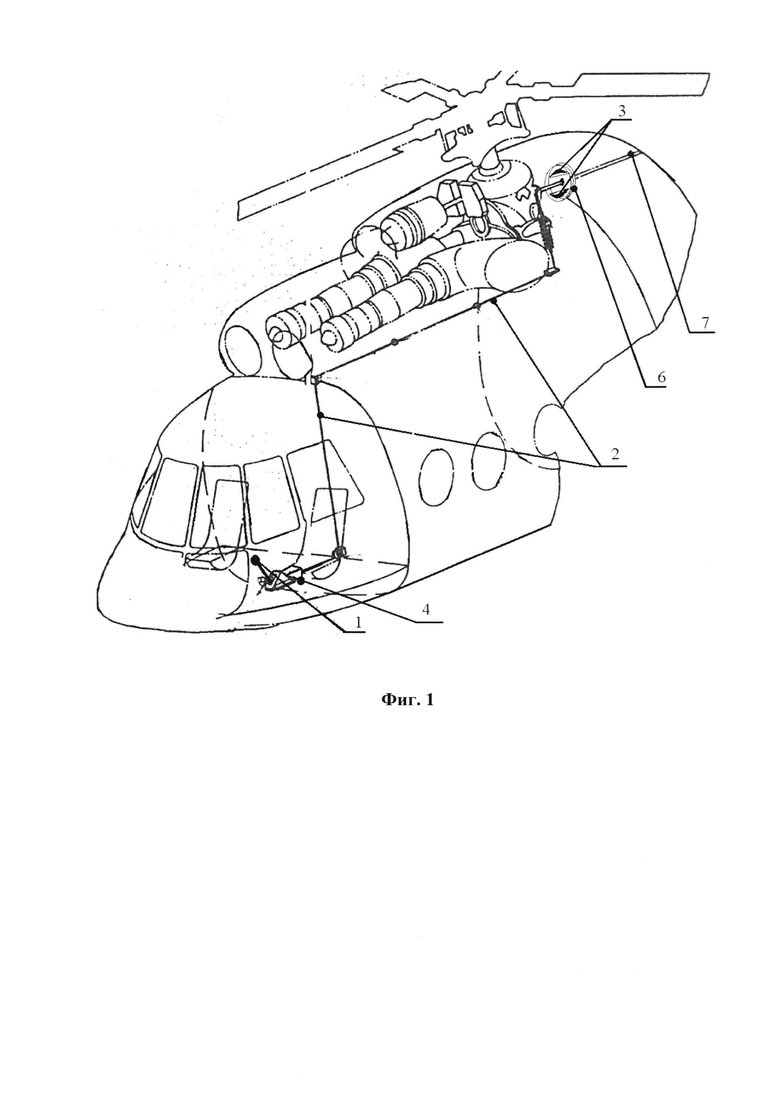
на фиг. 1 - системы управления тормозом несущего винта,
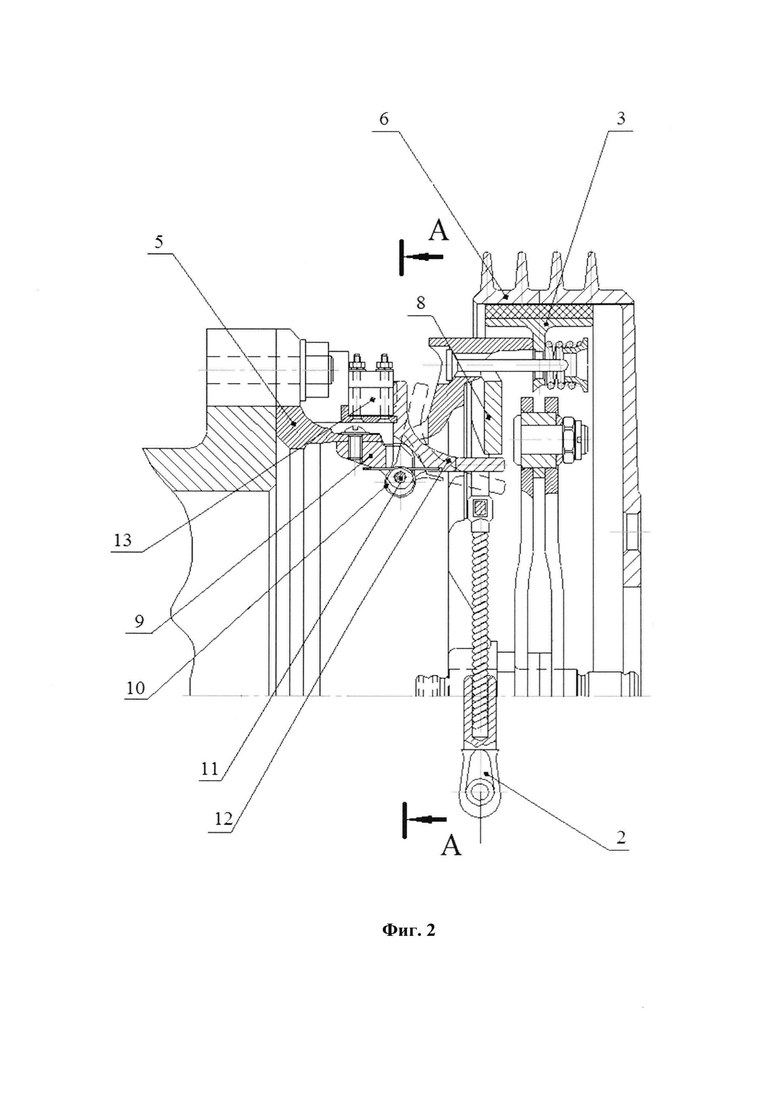
на фиг. 2 - тормоз несущего винта, разрез,
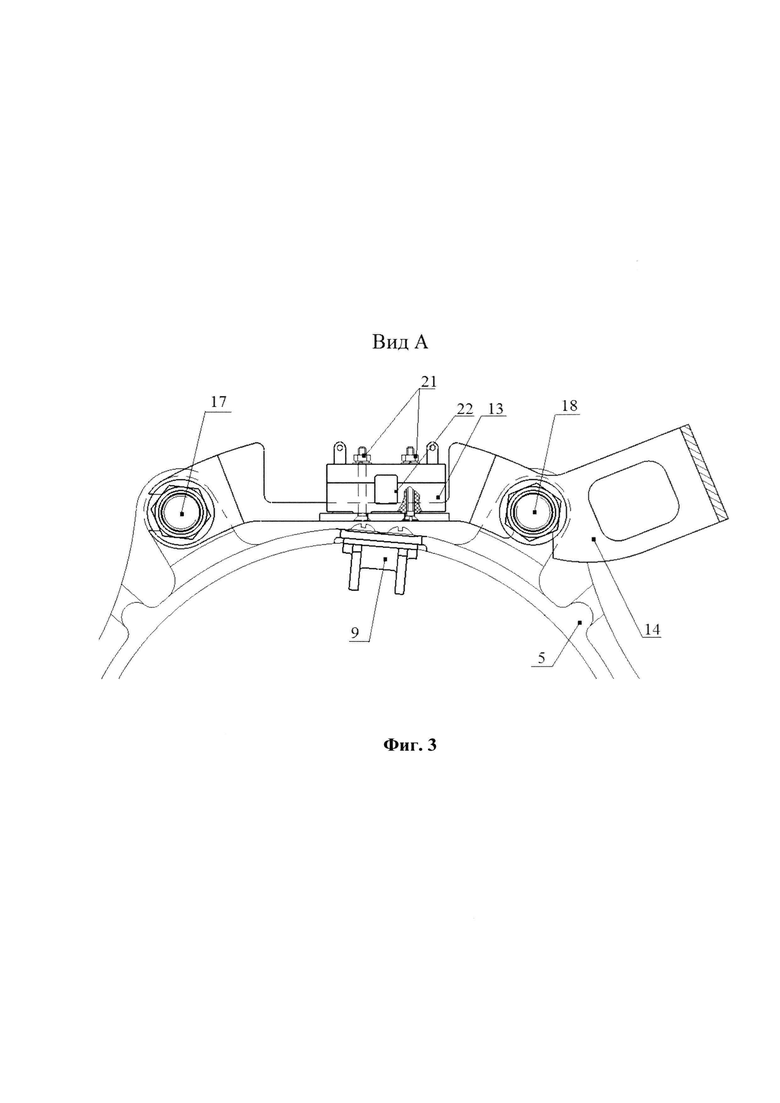
на фиг. 3 - микровыключатель (вид А фиг. 2),
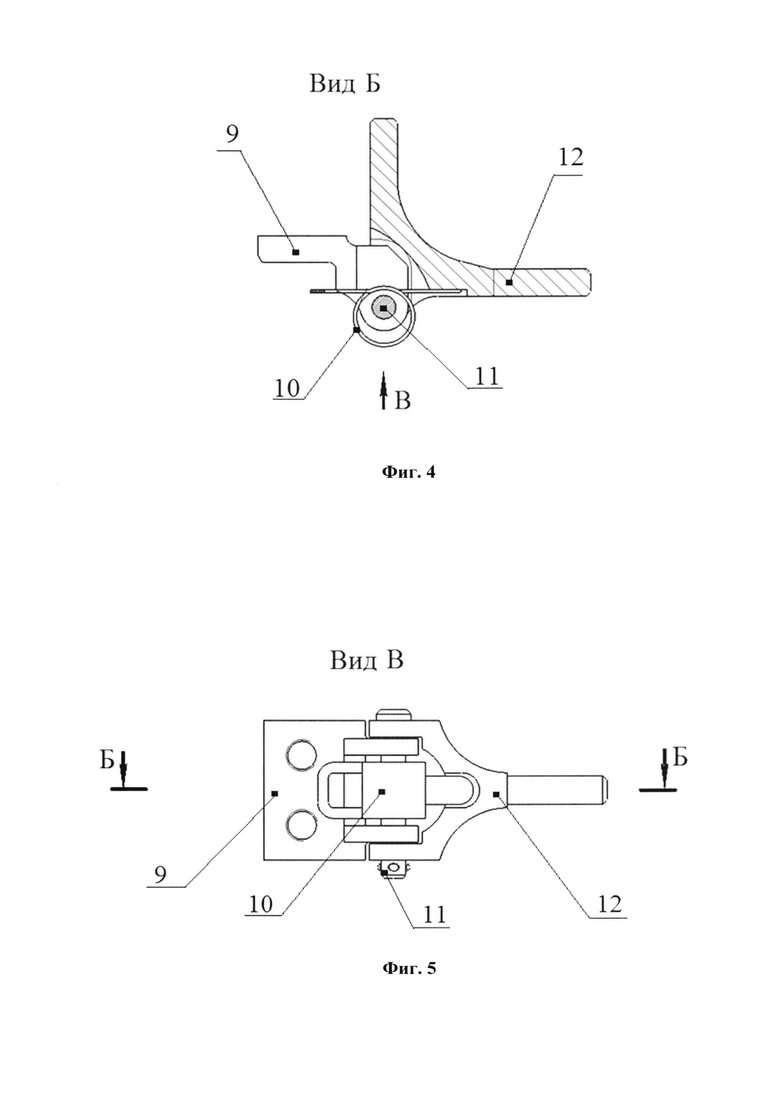
на фиг. 4 - механизма качения,
на фиг. 5 - механизма качения (вид В фиг. 4),
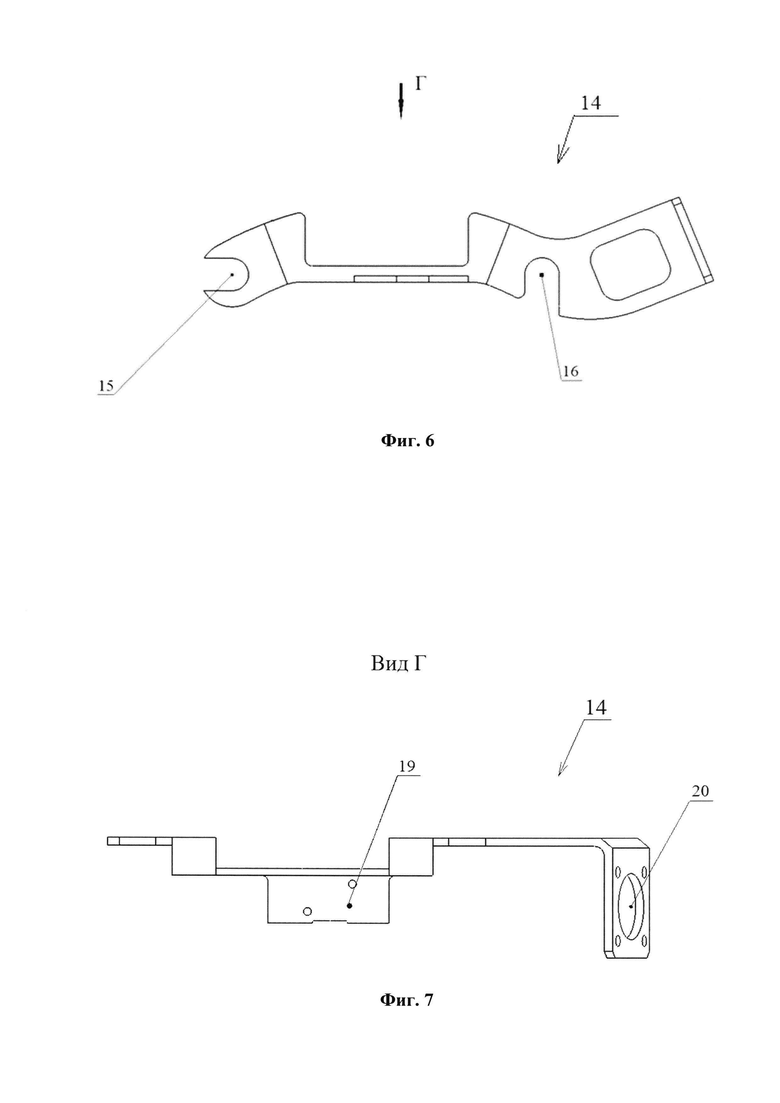
на фиг. 6 - установочный кронштейн, вид сбоку,
на фиг. 7 - установочный кронштейн (вид Г фиг. 6),
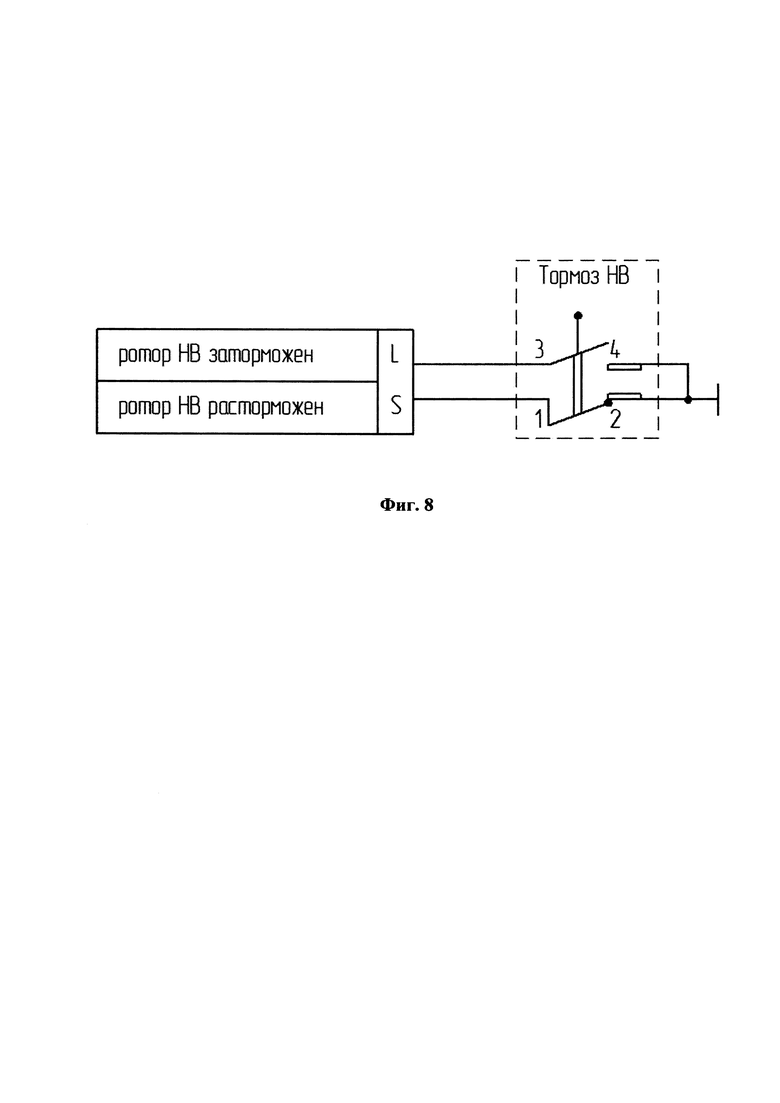
на фиг. 8 - электрическая схема со включенным в нее микровыключателем.
Система управления тормозом несущего винта летательного аппарата (фиг. 1) включает ручку 1, находящуюся в кабине экипажа, которая посредством троса 2 и системы рычагов связана с колодками 3 тормоза несущего винта. Рядом с ручкой 1 расположен выключатель 4.
Конструкция тормоза несущего винта барабанного типа (фиг. 2) включает кронштейн 5 (суппорт), а также барабан 6, контактирующий с колодками 3, который закреплен на хвостовом валу 7. На одной из колодок 3 (на верхней) закреплен штатный разжимной рычаг 8 тормоза, связанный с помощью троса 2 с ручкой управления 1.
Дополнительно в конструкцию тормоза введен механизм качения. На кронштейне 5 тормоза закреплен кронштейн 9 механизма качения, а на нем жестко установлена возвратная пружина 10, которая накручена вокруг оси 11 и поддерживает (подпружинивает) нажимной рычаг 12, установленный с возможностью поворота относительно оси 11. Ось 11 выполнена в виде металлического стержня с головкой с одной стороны и сквозным поперечным отверстием под шплинт с другой стороны (фиг. 4, 5).
С целью повышения достоверности информации о фактическом состоянии тормозной системы на кронштейне 5 тормоза дополнительно размещен четырехклеммный микровыключатель 13 на специальном установочном кронштейне 14 (фиг. 3).
На кронштейне 5 закреплен установочный кронштейн 14 сложной формы, который помещен вместо штатных шайб под штатный крепеж кронштейна 5 к фланцу главного редуктора (не показан). На установочном кронштейне 14 выполнены вырезы 15, 16 под штатные болты 17, 18, площадка 19, а также отверстие 20 (фиг. 6, 7). На площадке 19 закреплен при помощи винтов 21 микровыключатель 13 с кнопкой 22. Микровыключатель 13 подключен к электроцепи системы управления посредством розетки электросоединителя (не показано), которая размещена в специальном отверстии 20 кронштейна 14.
Форма и размеры микровыключателя 13 и установочного кронштейна 14 подобраны таким образом, чтобы не производить существенных изменений в конструкции тормоза несущего винта, что упрощает реализацию технического решения.
Принципиальная схема работы микровыключателя 13 приведена на фиг. 8. Переключение из положения 1-2 в положение 3-4 размыкает электрическую цепь, что соответствует истинности события "заторможено". Переключение из положения 3-4 в положение 1-2 соответствует истинности события "расторможено". При этом подаются соответствующие сигналы на приборную панель пилота.
Система управления тормозом несущего винта работает следующим образом.
Блокировка запуска двигателей осуществляется при помощи выключателя 4, который при нижнем (расторможенном) положении ручки 1 не только подает соответствующий сигнал о состоянии тормозной системы, но и замыкает электрическую цепь запуска, что позволяет запустить двигатели.
Для осуществления торможения несущего винта пилот поднимает вверх ручку 1, тем самым отпуская выключатель 4. Трос 2 натягивается и тянет вниз разжимной рычаг 8. Это обеспечивает прижатие колодок 4 к поверхности барабана 6. Рычаг 8 толкает вниз нажимной рычаг 12, который проворачивается относительно оси 11 и отпускает кнопку 22 микровыключателя 13. В соответствии со схемой (фиг. 8) подается сигнал «заторможено». Система запуска двигателей заблокирована.
Когда ручка 1 опущена вниз, выключатель 4 нажат. При этом трос 2 отпущен, а колодки 3 отжаты от барабана 6. Под действием возвратной пружины 10 нажимной рычаг 12 проворачивается относительно оси 11 и создает давящее усилие на кнопку 22, замыкая контакт микровыключателя 13. Подается сигнал «расторможено». Система запуска двигателей разблокирована.
Однако в случае аварийной ситуации, при обрыве троса 2 нарушается целостность проводки управления. В этом случае ручка 1 может быть поднята, а выключатель 4 отпущен. В то же время трос 2 не натянут (из-за обрыва), при этом разжимной рычаг 8 остается в верхнем положении, а колодки 3 отжаты от барабана 6. Управляющее усилие не поступает на нажимной рычаг 12, и возвратная пружина 10 удерживает его в нажатом положении. При этом рычаг 12 нажимает на кнопку 22 микровыключателя 13.
Таким образом, несмотря на то, что положение ручки 1 указывает на состояние «заторможено», фактически колодки 3 не прижаты к барабану 6 и тормозная система расторможена. В этом случае с помощью микровыключателя 13 подается сигнал «расторможено». Таким образом реализовано средство информирования пилота о состоянии (заторможенном или расторможенном) тормоза несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая система торможения несущих винтов вертолёта | 2019 |
|
RU2729870C1 |
| РУЧКА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2017 |
|
RU2652372C1 |
| РЫЧАГ ПРИВОДА СТОЯНОЧНОГО ТОРМОЗА | 2006 |
|
RU2301162C1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2023 |
|
RU2796557C1 |
| ТОРМОЗНОЕ КОЛЕСНОЕ УСТРОЙСТВО | 1991 |
|
RU2013277C1 |
| Устройство блокировки стояночного тормоза транспортного средства | 1989 |
|
SU1735092A1 |
| Стояночный тормоз | 1990 |
|
SU1757936A1 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2000 |
|
RU2191711C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2019 |
|
RU2710993C1 |
Система управления тормозом несущего винта включает ручку (1) с выключателем (4), которая находится в кабине экипажа и посредством троса (2) и системы рычагов связана с колодками (3) тормоза несущего винта. Тормоз включает кронштейн (5) и барабан (6), который закреплен на хвостовом валу (7) и контактирует с колодками (3). На кронштейне (5) тормоза закреплен кронштейн (9) механизма качения, а на нем установлена пружина (10), которая накручена вокруг оси (11) и поддерживает нажимной рычаг (12). На кронштейне (5) тормоза закреплен установочный кронштейн (14), на площадке (19) которого закреплен микровыключатель (13) с кнопкой (22). Нажимной рычаг (12) принимает управляющее усилие от ручки (1) управления посредством троса (2) и воздействует на микровыключатель (13), включая или выключая его кнопку (22). Обеспечивается информирование пилота о состоянии тормоза несущего винта даже в случае аварийного обрыва троса, соединяющего ручку управления с колодками тормоза. 2 з.п. ф-лы, 8 ил.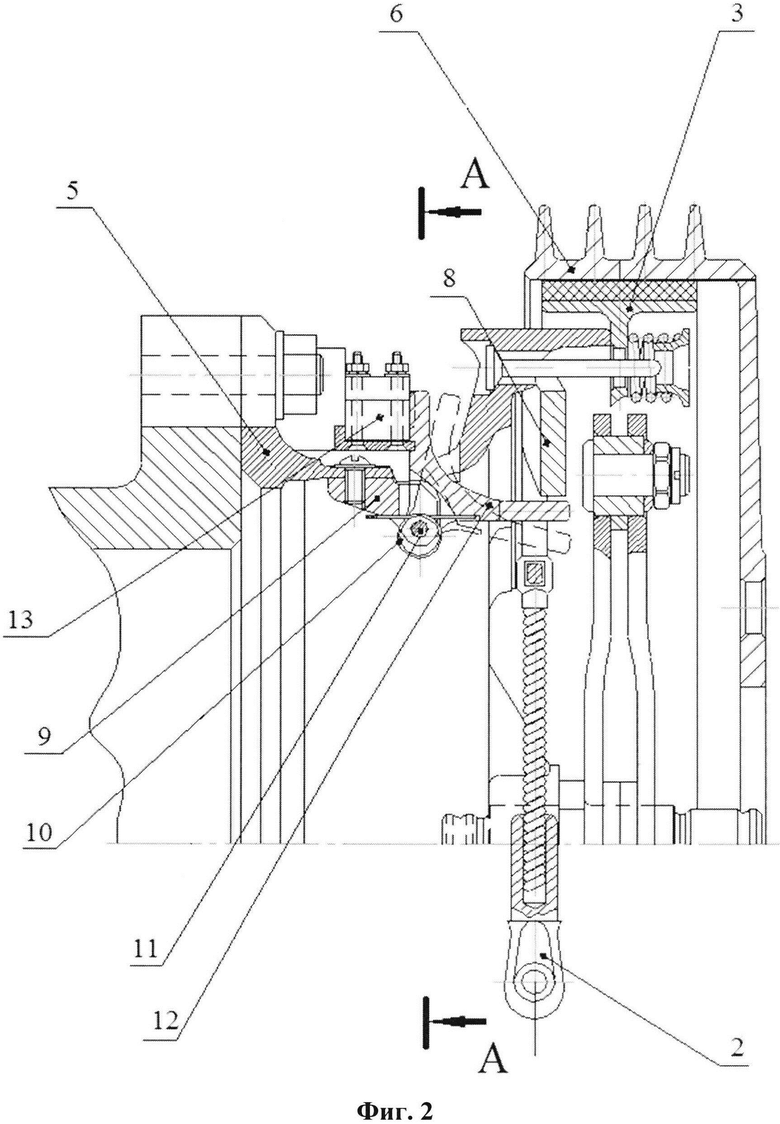
1. Система управления тормозом несущего винта, содержащая ручку управления и выключатель, размещенные в кабине экипажа, причем ручка связана с колодками тормоза несущего винта посредством троса и системы рычагов, отличающаяся тем, что на кронштейне тормоза несущего винта закреплены установочный кронштейн и кронштейн механизма качения, при этом на кронштейне механизма качения жестко установлена пружина, накрученная на ось и поддерживающая нажимной рычаг, а на установочном кронштейне закреплен микровыключатель.
2. Система по п. 1, отличающаяся тем, что установочный кронштейн выполнен с двумя вырезами, снабжен отверстием и закреплен болтами на кронштейне тормоза несущего винта.
3. Система по п. 1, отличающаяся тем, что ось механизма качения выполнена в виде металлического стержня с головкой с одной стороны и сквозным поперечным отверстием с другой стороны.
| US 6077042 A, 20.06.2000 | |||
| US 2005133314 A1, 23.06.2005 | |||
| СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2284284C2 |
| DE 19541193 C1, 14.11.1996. | |||

