Изобретение относится к авиационной технике и касается выполнения рычагов управления вертолетом, в частности ручки управления тормозом несущего винта вертолета.
Известна ручка управления общим шагом винта вертолета (патент US 5156363, В64С 13/04, публикация 20.10.1992), в которой ручка установлена в корпусе в кабине пилота и присоединена к системе шарнирно закрепленных между собой компенсационных звеньев. Шесть звеньев имеют определенную длину, расположены на минимальной площади, а их применение позволяет передавать управляющее усилие от ручки на исполнительный механизм. Предусмотрены две спиральные пружины, функционально связанные с механизмом сцепления. На корпусе закреплен электродвигатель, функционально связанный с ручкой, а также предусмотрена система передачи электрических сигналов для перемещения ручки посредством электронного контроллера, что усложняет систему управления в целом.
Известна ручка управления тормозом несущего винта (Авторское свидетельство SU 1073997, В64С 13/04, публикация 27.04.1996 г.), которая содержит рукоятку с составным рычагом, выполненным из двух частей, соединенных между собой с возможностью перемещения относительно друг друга, и закрепленным в кабине с помощью горизонтально расположенного шарнира. Конструкция ручки позволяет ее складывать с целью увеличения свободного пространства в кабине. Для этого одна часть рычага выполнена в виде вилки с рукояткой, а другая часть рычага выполнена в виде полого стержня, размещенного внутри вилки. Предусмотрен механизм фиксации частей рычага между собой.
Известна ручка управления тормозом трансмиссии, наиболее близкая к заявляемому техническому решению («Вертолет Ми-6. Техническое описание». - М.: Оборонгиз. - 1963 г., с. 141, фиг. 249), состоящая из ручки управления тормозом, которая размещена в кабине пилота и связана посредством троса с тормозными колодками. Рычаг ручки управления тормозом смонтирован на литом кронштейне с зубчатым сектором. Зубчатый сектор предназначен для стопорения ручки в различных положениях, которые фиксируются защелкой. Ручка расстопоривается путем нажатия кнопки. Ось ручки установлена в кронштейне на подшипниках. От рычага исполнительного механизма, укрепленного на оси, трос идет к рычагу тормоза. Таким образом, перемещение рычага ручки управления действует непосредственно на рычаг исполнительного механизма, который натягивает или отпускает трос.
Технической проблемой существующего уровня техники является создание ручки управления тормозом несущего винта с улучшенными эргономическими характеристиками и позволяющей уменьшить усилия, прилагаемые к органу управления тормозом несущего винта.
Данная техническая проблема не была решена в аналогах и прототипе по причине того, что в известных конструкциях отсутствует возможность регулирования величины управляющего усилия, необходимого для перемещения ручки.
Решение поставленной технической проблемы достигается благодаря тому, что ручка управления тормозом несущего винта содержит управляющий рычаг, снабженный рукояткой и закрепленный в корпусе, в котором размещен зубчатый сектор и установлена ось с закрепленным на ней рычагом исполнительного механизма, соединенным с тросом, в соответствии с заявляемым изобретением на оси установлено основание, на котором закреплены управляющий рычаг и дополнительный рычаг, также в корпусе установлен вал, на котором закреплены две качалки, которые соединены через тяги таким образом, что первая тяга соединена с дополнительным рычагом, а вторая тяга соединена с рычагом исполнительного механизма.
Кроме того, рычаг исполнительного механизма выполнен двуплечим.
Размещение в корпусе вала, на котором закреплены две качалки, соединенные между собой через тяги, позволяет уменьшить величину управляющей силы, а также усилий, прилагаемых к органу управления, что снижает физическую нагрузку пилота и улучшает эргономические характеристики устройства.
Конструкция ручки управления тормозом несущего винта поясняется чертежами, где изображены:
на фиг. 1 - ручка управления тормозом в нижнем положении, разрез, вид справа;
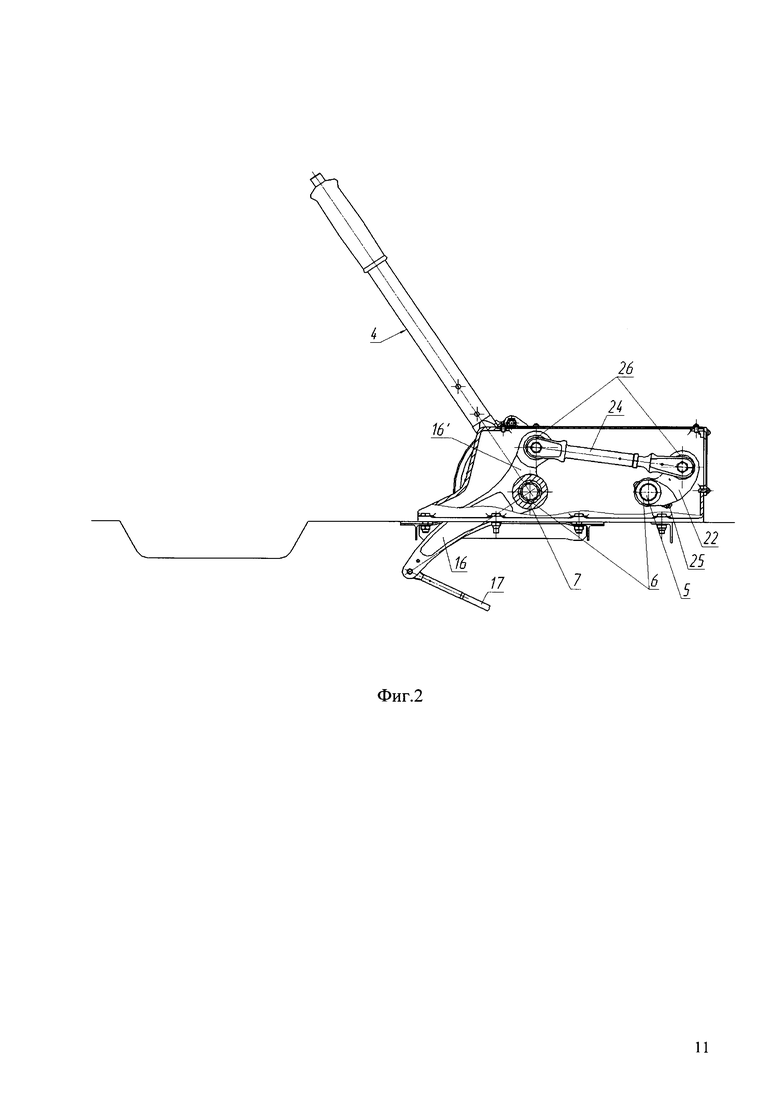
на фиг. 2 - ручка управления тормозом в верхнем положении, разрез, вид слева;
на фиг. 3 - ручка управления тормозом, аксонометрическая проекция, вид слева;
на фиг. 4 - ручка управления тормозом, аксонометрическая проекция, вид справа;
на фиг. 5 - кинематическая схема устройства.
В кабине пилота размещен корпус 1, закрытый крышкой 2 (фиг. 1). В нем расположены зубчатый сектор 3 и ручка 4 управления тормозом несущего винта.
В корпусе 1 также установлен вал 5 на подшипниках скольжения 6 и жестко закреплена металлическая ось 7.
Ручка 4 тормоза несущего винта состоит из управляющего рычага 8, закрепленного на основании 9, которое установлено на оси 7 на подшипниках скольжения 6. На основании 9 также жестко закреплен дополнительный рычаг 10. Рычаг 8 снабжен рукояткой 11 и кнопкой 12. Внутри рычага 8 расположен ползун 13, соединенный с защелкой 14, которая посредством пружины 15 поджата к зубчатому сектору 3. На оси 7 закреплен двуплечий рычаг 16 исполнительного механизма с плечом 16' (фиг. 2). К рычагу 16 прикреплен один конец троса 17, причем другой его конец соединен с рычагом колодок тормозного барабана (не показано).
На корпусе 1 установлен концевой выключатель 18, закрытый защитным элементом 19 (фиг. 3). При этом на валу 5 закреплен регулировочный болт 20 для взаимодействия с кнопкой выключателя 18.
Для регулирования величины управляющего усилия в устройство введен механизм компенсации, выполненный в виде качалок 21, 22 (фиг. 4), которые соединены через регулируемые по длине тяги 23, 24. На валу 5 параллельно закреплены качалки 21 и 22 с помощью конических болтов 25. Качалка 21 через тяги 23, 24 соединена с рычагом 16 исполнительного механизма, а качалка 22 - с дополнительным рычагом 10. При этом тяги 23 и 24 установлены на шарнирных подшипниках 26. Управляющий рычаг 8 связан с рычагом 16 исполнительного механизма не напрямую, а посредством механизма компенсации.
Устройство работает следующим образом.
При торможении несущего винта пилот нажимает на кнопку 12. Под действием ползуна 13 защелка 14 перемещается и выходит из зацепления с зубчатым сектором 3. После этого пилот поднимает рычаг 8 и перемещает его вдоль зубчатого сектора 3. Затем отпускает кнопку 12 и фиксирует рычаг 8. При этом защелка 14 перемещается в паз зуба зубчатого сектора 3 при помощи пружины 15.
При движении рычага 8 вверх основание 9 начинает прокручиваться вокруг оси 7, передавая движение тяге 23, которая вращает качалки 21, 22 на валу 5, тем самым передавая движение тяге 24, которая другим концом воздействует на рычаг 16. Затем рычаг 16 поворачивается и натягивает трос 17. При этом колодки прижаты к тормозному барабану, т.е. система заторможена. Регулировочный болт 20 освобождает кнопку выключателя 18, делая тем самым невозможным запуск двигателей.
При движении ручки 4 вниз основание 9 начинает прокручиваться в обратную сторону вокруг оси 7, также передавая движение тяге 23, качалкам 21, 22 и затем тяге 24, которая другим концом воздействует на рычаг 16 исполнительного механизма. Рычаг 16 поворачивается и ослабляет трос 17. При этом колодки отжаты от тормозного барабана, т.е. система расторможена. В то же время регулировочный болт 20 нажимает на кнопку выключателя 18, делая тем самым запуск двигателей возможным.
На фиг. 5 приведена кинематическая схема взаимного положения рычагов 8, 10, 16, 16' и качалок 21, 22, а также обозначены углы α, β, γ, ω, ε между конструктивными элементами.
Определяем, что угол подхода троса α - это угол между тросом 17 и перпендикуляром к линии, проведенной из шарнира рычага 16 к точке подсоединения к нему троса 17, который одновременно является линией действия силы Fк, создающей крутящий момент на рычаге 16.
Управляющая сила Fp (управляющее усилие), приложенная к ручке 4 тормоза несущего винта, и сила Fк, приложенная к рычагу 16, связаны следующим соотношением:
 , кгс, где
, кгс, где
Fк - сила, приложенная к рычагу 16, кгс;
Fp - сила, приложенная к управляющему рычагу 8, кгс;
Lp - длина управляющего рычага 8, мм;
L1…L5 - длины рычагов 16, 9, качалок 21, 22 и плеча рычага 16' соответственно, мм;
α, β, γ, ω, ε - углы, определяющие положение рычагов и качалок в пространстве:
α - угол подхода троса 17, угол между нормалью к рычагу 16 и тросом 17;
β - угол между нормалью к плечу рычага 16' и тягой 24;
γ - угол между тягой 24 и нормалью к качалке 22;
ω - угол между тягой 23 и нормалью к качалке 21;
ε - угол между тягой 23 и нормалью к рычагу 10.
Подбирая соотношение вышеуказанных параметров, можно добиться необходимого соотношения величин сил Fк и Fp. При необходимости можно регулировать требуемую величину управляющей силы Fp путем увеличения или уменьшения длин тяг 23 и 24.
Работа предлагаемого устройства проверена в стендовых условиях при исследовании разрабатываемой модели тяжелого вертолета.
В результате испытаний было установлено, что использование ручки управления тормозом несущего винта старой конструкции (прототип) для величины угла подхода троса α=32°, обусловленного заданной компоновкой агрегатов, привело к увеличению управляющей силы Fp до 65 кг.
Использование ручки управления в соответствии с заявляемым изобретением снизило значение Fp до 35 кг при одинаковом значении угла подхода троса α=32°.
В Таблице 1 приведены значения ключевых параметров при проведении стендовых испытаний. Параметры зафиксированы при верхнем положении ручки 4, т.е. когда система заторможена (фиг. 5).


Таким образом, решена поставленная техническая проблема - разработана ручка управления тормозом несущего винта, в которой предусмотрена возможность уменьшения управляющего усилия, необходимого для перемещения ручки, а также снижена физическая нагрузка пилота, улучшены эргономические характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| Ручка управления летательного аппарата | 1975 |
|
SU533017A1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2652873C1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2023 |
|
RU2796557C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| Запорное устройство двери кабины | 2021 |
|
RU2762465C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |




Изобретение относится к авиационной технике, в частности к органам управления несущими винтами вертолетов. Ручка управления тормозом несущего винта содержит управляющий рычаг (8), снабженный рукояткой (11) и закрепленный в корпусе (1), в котором размещены зубчатый сектор (3), вал (5) и ось (7) с закрепленным на ней двуплечим рычагом (16) исполнительного механизма. На оси (7) установлено основание (9), на котором закреплены управляющий рычаг (8) и дополнительный рычаг (10). Для регулирования величины управляющего усилия в устройство введен механизм компенсации, выполненный в виде качалок (21, 22), которые соединены через тяги (23, 24). При движении рычага (8) вверх основание (9) начинает прокручиваться вокруг оси (7), передавая движение тяге (23), которая вращает качалки (21, 22) на валу (5), тем самым передавая движение тяге (24), которая другим концом воздействует на рычаг (16). Затем рычаг (16) поворачивается и натягивает трос (17). При этом колодки прижаты к тормозному барабану. Уменьшается величина усилий, прилагаемых к органу управления, снижается физическая нагрузка пилота, улучшаются эргономические характеристики устройства. 1 з.п. ф-лы, 1 табл., 5 ил.
1. Ручка управления тормозом несущего винта, содержащая управляющий рычаг, снабженный рукояткой и закрепленный в корпусе, в котором размещен зубчатый сектор и установлена ось с закрепленным на ней рычагом исполнительного механизма, соединенным с тросом, отличающаяся тем, что на оси установлено основание, на котором закреплены управляющий рычаг и дополнительный рычаг, также в корпусе установлен вал, на котором закреплены две качалки, которые соединены через тяги таким образом, что первая тяга соединена с дополнительным рычагом, а вторая тяга соединена с рычагом исполнительного механизма.
2. Ручка управления тормозом несущего винта по п. 1, отличающаяся тем, что рычаг исполнительного механизма выполнен двуплечим.
| SU 1073997 A1, 27.04.1996 | |||
| US 5462137 A1, 31.10.1995 | |||
| Силовой привод тормоза | 1983 |
|
SU1180283A1 |
| Тиратронный модулятор | 1971 |
|
SU706922A1 |
| US 4212211 A1, 15.07.1980. | |||

