Настоящее изобретение относится к авиационной технике, в частности к системе торможения несущего винта вертолета и может быть использовано на вертолетах, снабженных тормозами барабанного типа.
Торможение несущих винтов необходимо для сокращения времени останова несущих винтов после выключения двигателей на земле, а также для стопорения трансмиссии при стоянке или при проведении на вертолете регламентных и монтажных работ.
Известно устройство торможения несущего винта вертолета (патент DE 19541193, В64С 27/12, 1996 г.), которое снабжено рычагом управления тормозом в кабине пилота, связанного тросовой проводкой с рычагом привода гидропередачи, связанной маслопроводом с гидроцилиндрами, управляющими тормозными колодками, шарнирно установленными на суппорте. Суппорт связан со свободным концом опорного рычага (качалкой), который другим концом связан с корпусом главного редуктора поворотным шарниром. Под свободным концом опорного рычага (качалки) на корпусе редуктора установлена возвратная пружина и микровыключатель. Между тормозными колодками установлен тормозной диск, связанный с хвостовым валом главного редуктора.
При повороте рычага управления тормозом в положение «Заторможено», управляющие гидроцилиндры приводят в действие тормозные колодки, которые сходятся до контакта (сцепления) с вращающимся тормозным диском. Образующийся при этом начальный момент трения (тормозной момент) приводит повороту суппорта, закрепленного на свободном конце опорного рычага, установленная на корпусе редуктора возвратная пружина сжимается под действием опорного рычага и при этом срабатывает микровыключатель, сигнализирующий о начале торможения несущего винта. Продолжение поворота рычага управления тормозом приводит к увеличению тормозного момента до максимально допустимого.
При обратном повороте рычага управления тормозом в исходное положение «Расторможено» тормозные колодки расходятся, тормозной момент уменьшается до начального значения, но при этом возвратная пружина продолжает удерживать микровыключатель во включенном состоянии и возвращает опорный рычаг с суппортом в исходное положение с одновременным отключением микровыключателя только после полной остановки тормозного диска, сигнализируя тем самым о растормаживании несущего винта.
Таким образом, в рассмотренной конструкции устройства торможения несущего винта вертолета по патенту DE 19541193 предусмотрена возможность контроля не перемещения управляющих или исполнительных элементов конструкции, а непосредственный контроль состояния тормозного диска, т.е. вращения или остановки несущего винта вертолета.
Недостатком рассмотренного гидромеханического устройства торможения винтов вертолета является усложнение конструкции за счет количества разнотипных узлов при необходимости обеспечения их синхронной работы, что снижает надежность устройства в эксплуатации.
Кроме того, данное устройство применимо только для тормозов дискового типа.
Известна система управления тормозом несущего винта вертолета Ми-6А («Вертолет Ми-6А», «Транспорт», 1977 г., рис. 125,162, https://armyman.info/books/id-15712.html). состоящая из ручки управления тормозом, которая размещена в кабине пилота и связана посредством троса с тормозными колодками. Управление тормозом сблокировано с системой запуска двигателей, в результате чего запуск возможен только при полностью расторможенной трансмиссии, т.е., когда ручка находится в крайнем нижнем положении. При таком положении размещенный на ручке концевой выключатель замыкает электрическую цепь системы запуска двигателей. В данной конструкции положение ручки управления указывает пилоту о состоянии тормозной системы несущего винта.
Недостатком такой конструкции является возможная недостоверность информации о заторможенном или расторможенном состоянии тормоза, так как управляющее усилие от ручки управления может быть не связано с перемещением тормозных колодок, например, из-за аварийного обрыва тросовой цепи управления, идущей из кабины к рычагу управления колодками, а также не позволяет летчику контролировать состояние тормоза винтов в полете.
Наиболее близким техническим решением является, принятая в качестве прототипа, конструкция системы торможения несущих винтов вертолета Ка-226Т, описанная в Руководстве по технической эксплуатации 226.52.0000.0000 РЭ (Вертолет Ка-226Т, Книга II, Системы вертолета и силовая установка, Часть 2, Силовая установка).
Механическая система управления тормозом (система торможения) несущих винтов (НВ) состоит из рычага управления торможением, установленного на пульте управления в кабине экипажа, выполненного с возможностью фиксации его в двух крайних положениях «Расторможено» и «Заторможено», тормоза несущих винтов с крышкой, выполненной с цапфой, тормозного барабана, связанного с валом привода тормоза, суппорта, двух тормозных колодок, связанных с суппортом шарнирами и связанных между собой возвратными пружинами, валика, связанного с рычагом тормоза и кинематически связанного с тормозными колодками, микровыключателя, связанного с кронштейном, закрепленным к крышке тормоза и проводки, связывающей рычаг управления торможением с рычагом тормоза.
В данной конструкции состояние тормозной системы несущих винтов контролируется летчиком по положению исполнительного органа управления - рычага тормоза, кинематически связанного с тормозными колодками и непосредственно управляющего торможением НВ, в также контролируется состояние НВ по срабатыванию микровыключателя, но только их расторможенное состояние (сигнал «Расторможено»).
Недостатком такой конструкции является недостаточный объем и недостоверность информации о заторможенном состоянии тормоза НВ и также не позволяет летчику контролировать состояние тормоза винтов в полете. Кроме того, надежность гибкой проводки, связывающей рычаг управления торможением с рычагом тормоза, недостаточна из-за возможности повреждения или обрыва тросовой цепи управления.
Предлагаемое техническое решение устраняет отмеченные недостатки рассмотренных конструкций механических систем торможения несущих винтов вертолета решает задачу объективного контроля их состояния, обеспечивая повышенную безопасность вертолета при возникновении сложных или аварийных ситуаций на всех этапах полета.
Целью настоящего изобретения является создание системы торможения несущих винтов вертолета повышенной надежности за счет усовершенствования конструкции и установки дополнительных средств объективного контроля состояния тормоза несущих винтов на всех этапах полета вертолета.
Технический результат заключается в повышении надежности при эксплуатации вертолета и безопасности применения тормозных устройств системы привода несущих винтов вертолета при возникновении непредвиденных ситуаций перед взлетом, в полете и после приземления.
Указанный технический результат достигается тем, что механическая система торможения несущих винтов вертолета, содержащая рычаг управления торможением 1, установленный на пульте управления 2 в кабине экипажа, выполненный с возможностью фиксации его на пульте управления 2 в двух крайних положениях, крышку тормоза 3, выполненную с цапфой 4 и связанную с корпусом редуктора 5, тормозной барабан 6, связанный с валом привода тормоза 7, суппорт 8, две тормозные колодки 9, связанные с суппортом 8 шарнирами 10 и связанные между собой возвратными пружинами 11, рычаг тормоза 12, валик 13, связанный с рычагом тормоза 12 и кинематически связанный с тормозными колодками 9, микровыключатель 14, связанный с кронштейном 15, закрепленным к крышке тормоза 3 и гибкую проводку 16, связывающую рычаг управления торможением 1 с рычагом тормоза 12, снабжена дополнительно установленными кронштейном 17 и микровыключателем 18, связанным с кронштейном 17, закрепленным на крышке тормоза 3, валиком 13 установленным на суппорте 8 между шарнирами 10, суппортом 8 снабженным дополнительно установленным толкателем 19, связанным с кронштейном 15 дополнительно установленной возвратной пружиной 20, крышка тормоза 3 снабжена дугообразными пазами 21,22 в которых размещены валик 13 и толкатель 19, соответственно, суппорт 8 выполнен со ступицей 23 и установлен соосно с цапфой 4 и тормозным барабаном 6 с возможностью поворота ступицы 23 относительно цапфы 4 совместно с тормозным барабаном 6 при контакте (сцеплении) его с тормозными колодками 9, причем паз 22 ограничивает ход толкателя 19 с возможностью срабатывания микровыключателя 18 при контакте с толкателем 19, гибкая проводка 16 связана с рычагом тормоза 12 через дополнительно установленный пружинный наконечник 24, а рычаг управления торможением 1 выполнен с возможностью дополнительной фиксации его на пульте управления 2 в промежуточном положении в момент контакта (сцепления) тормозных колодок 9 с тормозным барабаном 6, последующего поворота суппорта 8 относительно цапфы 4 и срабатывания микровыключателя 18 под действием толкателя 19.
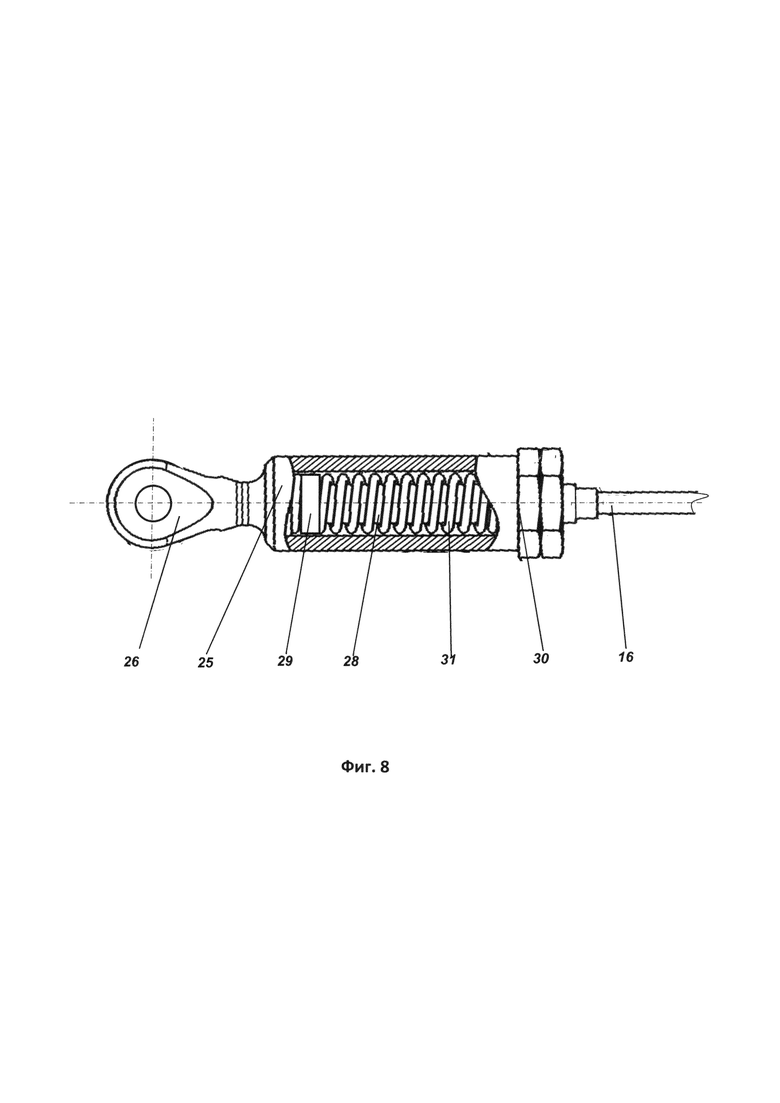
В одном из вариантов выполнения заявленного изобретения пружинный наконечник 24 выполнен в виде силового цилиндра 25 с проушиной 26, связанной с рычагом тормоза 12 шарниром 27, а в силовом цилиндре 25 установлен подвижный шток 28 с поршнем 29, связанным с торцом 30 силового цилиндра 25 пружиной сжатия 31.
В другом варианте выполнения заявленного изобретения, проводка 16, связывающая рычаг управления торможением 1 с рычагом тормоза 12, выполнена в виде пушпульной тяги с возможностью передачи толкающего или растягивающего усилия от рычага управления торможением 1, действующего на силовой цилиндр 25 через подвижный шток 28 и связанные с ним поршень 29 и пружину сжатия 31.
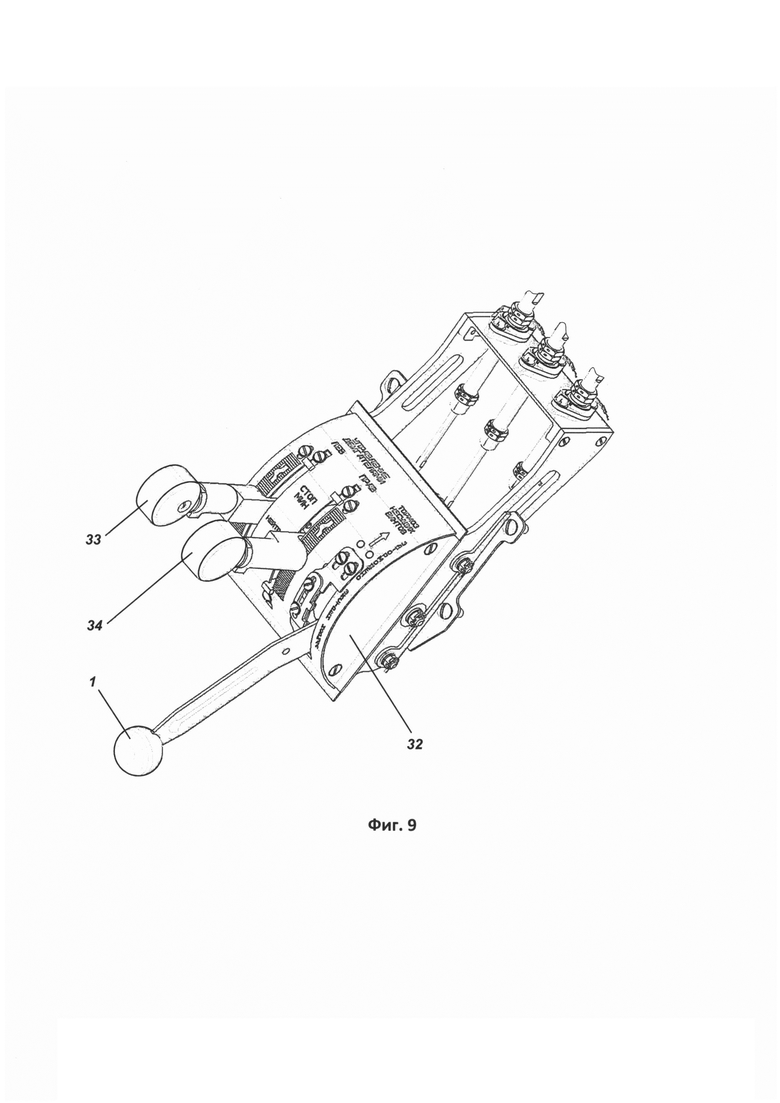
Рассмотрен, также, вариант выполнения заявленного изобретения, при котором рычаг управления торможением 1 установлен на одном комбинированном пульте управления двигателями и тормозом несущих винтов 32 с установленными на нем рычагами 33 и 34 управления левым и правым двигателями вертолета.
Работа механической системы торможения несущих винтов вертолета поясняется следующими чертежами:
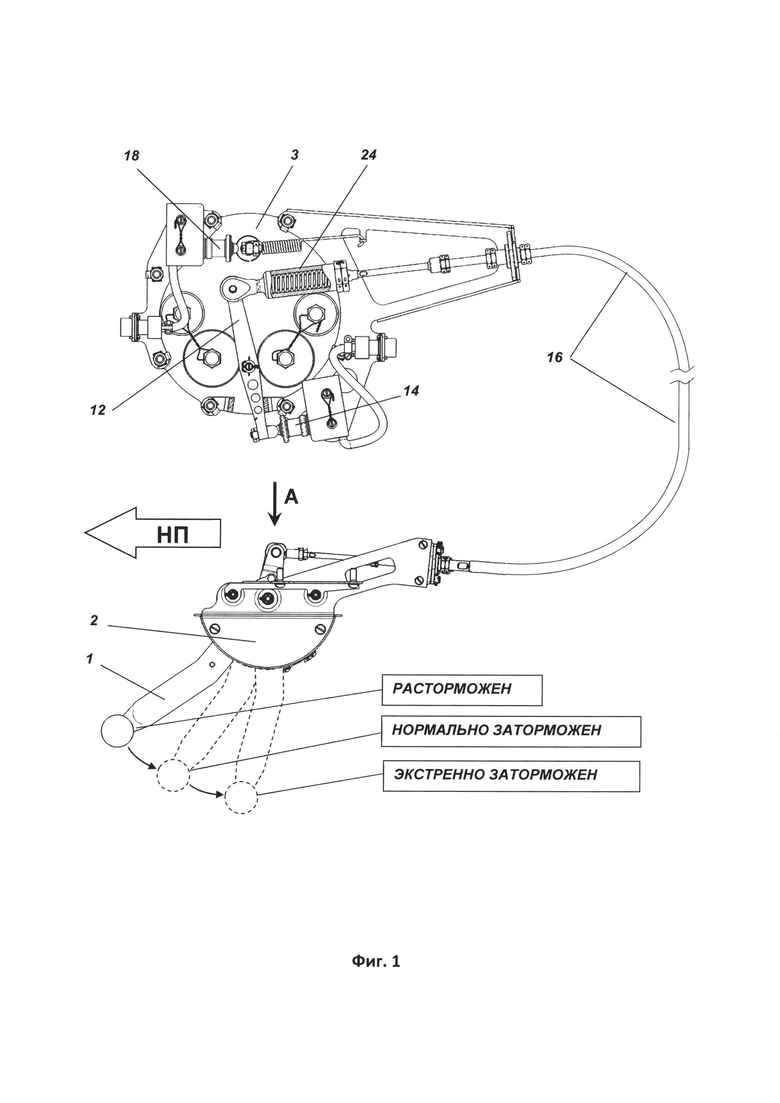
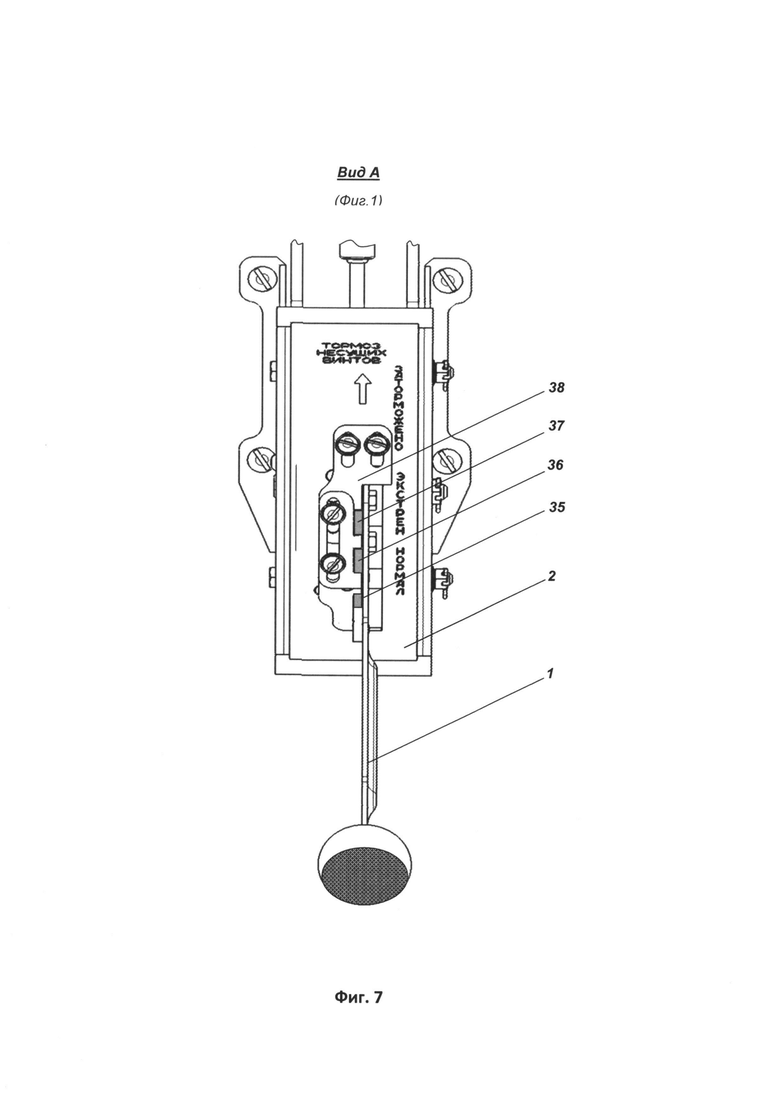
На фиг. 1 показана схема предлагаемой системы торможения несущих винтов с рычагом управления торможением, установленным на пульте управления и крышкой тормоза
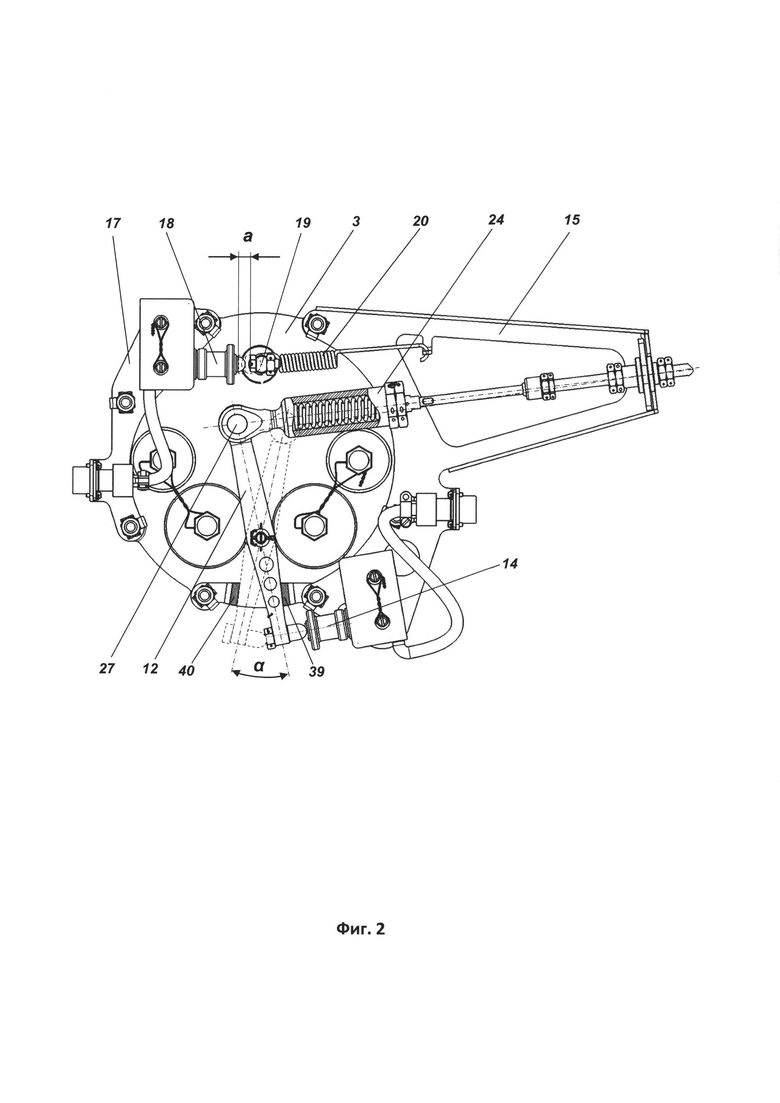
На фиг. 2 показана крышка предлагаемого тормоза несущих винтов с установленными устройствами привода и контроля
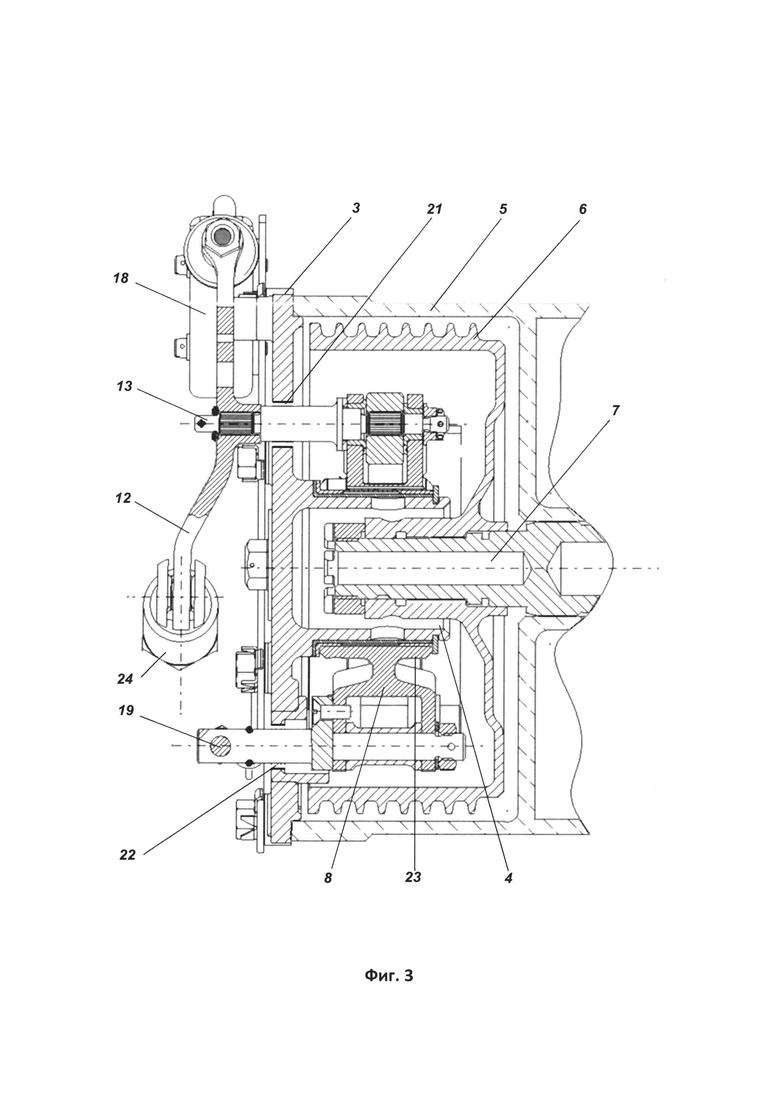
На фиг. 3 показано поперечное сечение предлагаемого тормоза несущих винтов в сборе с тормозным барабаном и валом привода
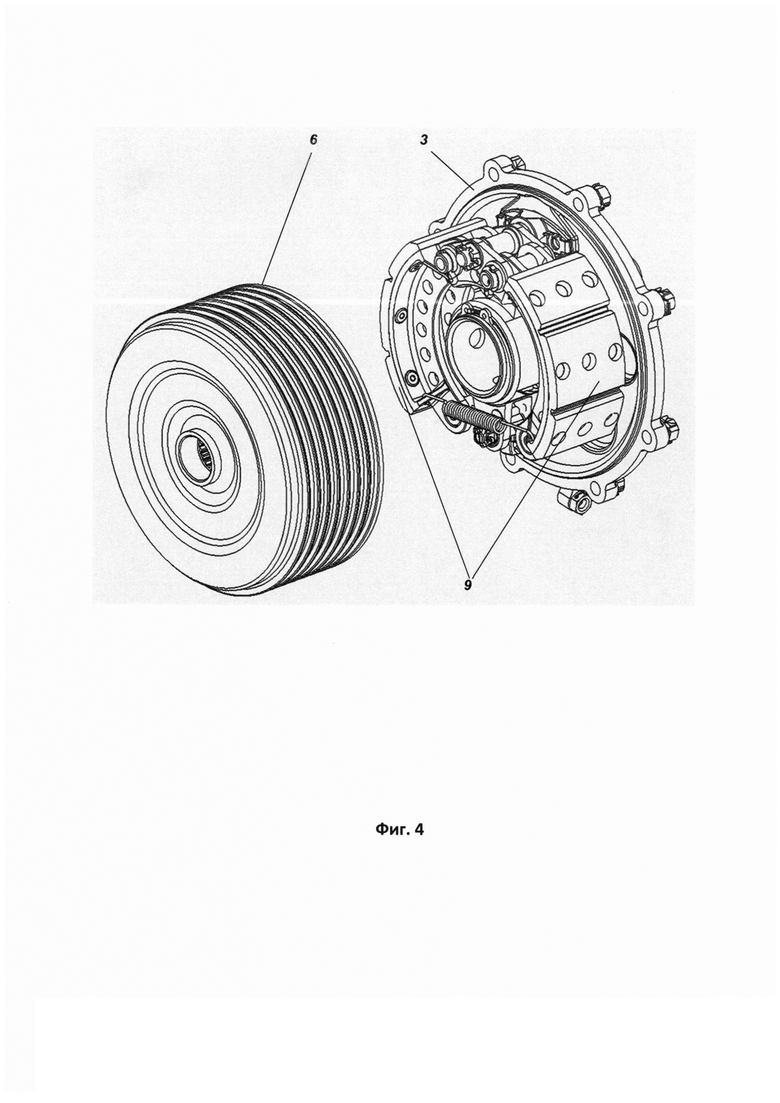
На фиг. 4 показан общий тормозного барабана и крышки тормоза с тормозными колодками
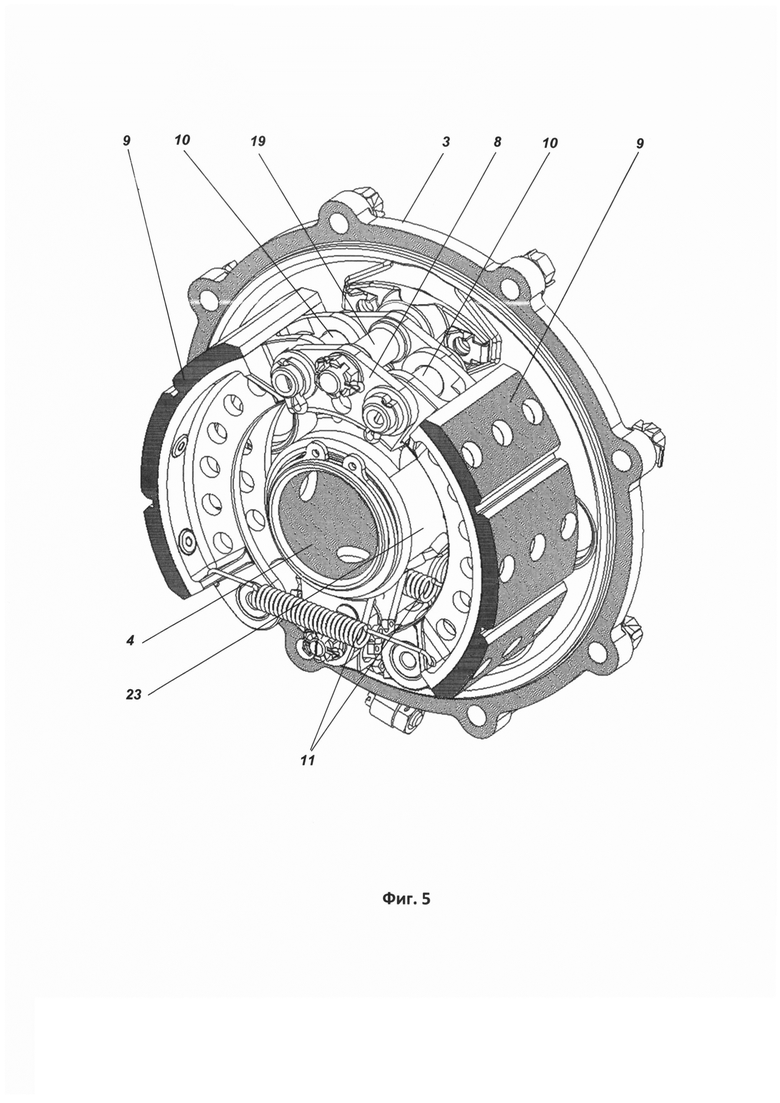
На фиг. 5 показан общий крышки тормоза в сборе с суппортом, тормозными колодками, толкателем и возвратными пружинами
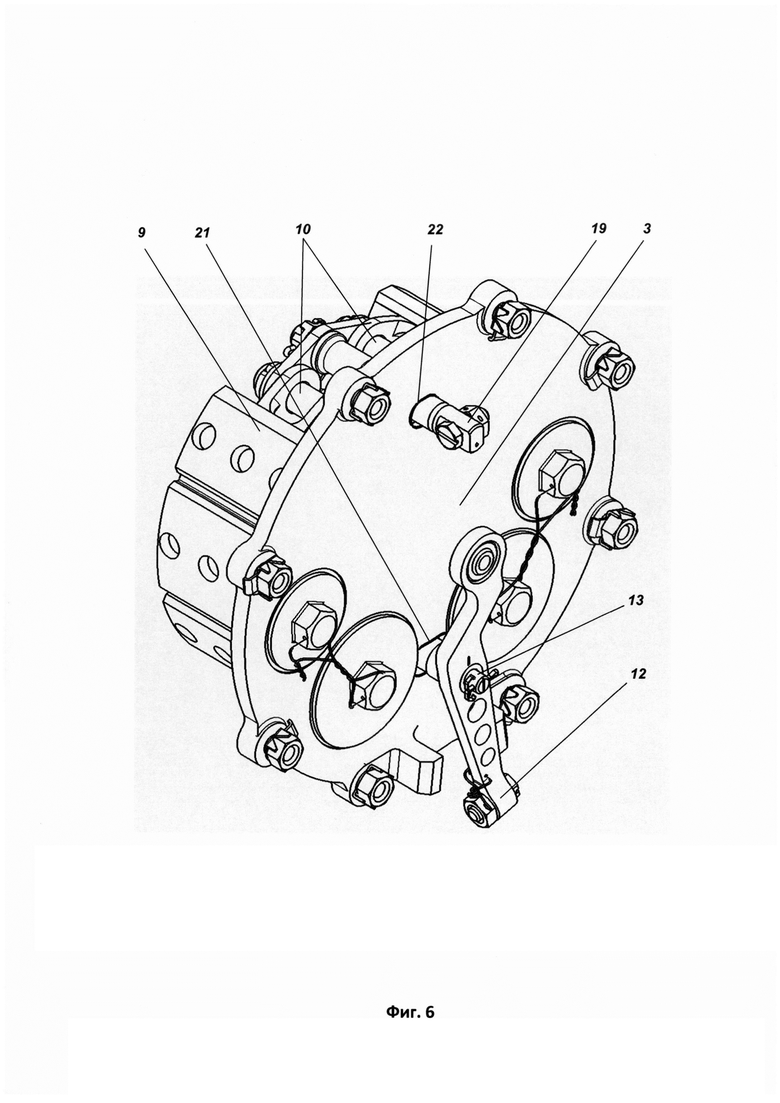
На фиг. 6 показан общий крышки тормоза с установленными в пазах толкателем и рычагом тормоза
На фиг. 7 показан пульт с рычагом управления торможением и с пазами фиксации его в трех положениях.
На фиг. 8 показан силовой цилиндр со штоком, поршнем и пружиной.
На фиг. 9 показан комбинированный пульт управления двигателями и тормозом несущих винтов с установленными на нем рычагами управления торможением НВ и управления левым и правым двигателями вертолета.
Механическая система торможения несущих винтов вертолета состоит из рычага управления торможением 1, установленного на пульте управления 2 в кабине экипажа, крышки тормоза 3, выполненной с цапфой 4 и связанной с корпусом редуктора 5, тормозным барабаном 6, связанным с валом привода тормоза 7, суппорта 8, двух тормозных колодок 9, связанных с суппортом 8 шарнирами 10 и связанных между собой возвратными пружинами 11, рычага тормоза 12, валика 13, связанного с рычагом тормоза 12 и кинематически связанного с тормозными колодками 9, микровыключателя 14, связанного с кронштейном 15, закрепленным к крышке тормоза 3 и гибкой проводки 16, связывающей рычаг управления торможением 1 с рычагом тормоза 12, кронштейна 17 и микровыключателя 18, связанного с кронштейном 17, закрепленным на крышке тормоза 3, валика 13 установленного на суппорте 8 между шарнирами 10, толкателя 19, связанного с суппортом 8 и связанного с кронштейном 15 возвратной пружиной 20, крышка тормоза 3 снабжена дугообразными пазами 21, 22, в которых размещены валик 13 и толкатель 19, соответственно, суппорт 8 выполнен со ступицей 23 и установлен соосно с цапфой 4 и тормозным барабаном 6 с возможностью поворота ступицы 23 относительно цапфы 4 совместно с тормозным барабаном 6 при контакте (сцеплении) его с тормозными колодками 9, причем паз 22 ограничивает ход толкателя 19 с возможностью срабатывания микровыключателя 18 при контакте с толкателем 19, гибкая проводка 16 связана с рычагом тормоза 12 через пружинный наконечник 24, а рычаг управления торможением 1 выполнен с возможностью дополнительной фиксации его на пульте управления 2 в промежуточном положении в момент контакта (сцепления) тормозных колодок 9 с тормозным барабаном 6, поворота суппорта 8 относительно цапфы 4 и срабатывания микровыключателя 18 под действием толкателя 19.
Пружинный наконечник 24 выполнен в виде силового цилиндра 25 с вилкой 26, связанной шарниром 27 с рычагом тормоза 12, а в силовом цилиндре 26 установлен подвижный шток 28 с закрепленным к нему поршнем 29, связанным с торцом 30 силового цилиндра 25 пружиной сжатия 31
Проводка 16, связывающая рычаг управления торможением 1 с рычагом тормоза 12, выполнена в виде пушпульной тяги с возможностью передачи толкающего усилия или усилия тяги от рычага управления торможением 1, действующего на силовой цилиндр 25 через подвижный шток 28 и связанные с ним поршень 29 и пружину сжатия 31.
Рычаг управления торможением 1 установлен на одном комбинированном пульте управления двигателями и тормозом несущих винтов 32 с установленными на нем рычагами 33 и 34 управления левым и правым двигателями вертолета.
При нахождении рычагов управления двигателями в положении
«МАЛ ГАЗ» или «АВТОМАТ» перемещение рычага управления торможением несущих винтов из положения «РАСТОРМОЖЕНО» в положение «ЗАТОРМОЖЕНО» блокируется.
Микровыключатели 14 и 18 установлены на кронштейнах 15 и 17, закрепленных к крышке тормоза 3. Микровыключатель 14 предназначен для индикации включения тормоза несущих винтов вертолета при полностью остановленных винтах перед полетом и посте приземления.
Микровыключатель 18 предназначен для непосредственной индикации начала момента торможения, также для информирования летчика о возможном самопроизвольном включении тормоза несущих винтов при возникновении тормозного момента на валу привода тормоза 7.
Механическая система торможения несущих винтов вертолета работает следующим образом.
Торможение и растормаживание несущих винтов происходит от перемещения (поворота) рычага управления торможением 1 несущих винтов, на пульте управления 2 в кабине экипажа, при котором пружинный наконечник 24 через проводку 16, приводит к повороту рычага тормоза 12, закрепленного на валике 13, установленным на поворотном суппорте 8 и кинематически связанным с тормозными колодками 9.
Рычаг управления торможением 1 выполнен с возможностью фиксации его в трех поперечных пазах 35, 36 и 37, выполненных в стопорной пластине 38, установленной на пульте управления 2, для переднего, среднего и заднего фиксированных положений рычага управления торможением 1, соответственно,
При повороте рычага управления торможением 1 от себя на пульте управления 2, установленного на потолке кабины экипажа, проводка 16 через пружинный наконечник 24 передает толкающее усилие на рычаг тормоза 12 и переводит его в расторможенное положение. В этом положении рычаг управления торможением 1 фиксируется в переднем положении "Расторможен" в поперечный паз 35, а несущие винты будут находиться в расторможенном состоянии. При этом срабатывает микровыключатель 14, который выводит сигнал на приборную панель пилота о возможности торможения несущих винтов.
После полной остановки несущих винтов и возвращении рычага управления торможением в исходное положение, тормозной момент пропадает, толкатель 19 суппорта 8 возвращается в исходное положение возвратной пружиной 20 и микровыключатель 18 перестает выдавать сигнал о включении тормоза несущих винтов. При этом, под действием возвратных пружин 11 тормозные колодки 9 отжимаются от тормозного барабана 6 и возвращаются в исходное расторможенное положение.
При повороте рычага управления торможением на себя проводка 16 через пружинный наконечник 24 передает растягивающее усилие на рычаг тормоза 12 и переводит его в заторможенное положение. В этом положении рычаг управления торможением 1 фиксируется в положение "Нормально заторможен» в поперечном пазу 36, выполненного в стопорной пластине 38 на пульте управления 2 и несущие винты будут находиться в заторможенном состоянии. При повороте толкателя 19, связанного с суппортом 8, от действия момента трения в зацеплении с тормозным барабаном 6, срабатывает микровыключатель 18, который выводит сигнал на приборную панель пилота о начале торможения несущих винтов.
В этом положении тормозной момент, действующий на вал привода тормоза через тормозной барабан, ограничен усилием пружинного наконечника 24, действующего на рычаг тормоза 12 с возможностью штатного режима торможения, заданного допустимыми для включения тормоза частотой вращения и временем торможения несущих винтов. Например, для вертолета Ка-226Т допустимая частота вращения несущих винтов при включении тормоза останова несущих винтов после выключения двигателей на земле должна быть не более 40% по тахометру, а время до полного останова несущих винтов - не более 60 с.
При необходимости экстренного торможения несущих винтов, рычаг управления торможением переводится из переднего фиксированного положении "Расторможен" в поперечном пазу 35 в фиксированное положение "Экстренно заторможен» в поперечном пазу 37.
В этом положении тормозной момент, действующий на вал привода тормоза через тормозной барабан, также ограничен усилием пружинного наконечника 24, действующего на рычаг тормоза 12, но это усилие увеличивается от действия на суппорт с установленными тормозными колодками дополнительного крутящего момента, возникающего на рычаге тормоза 12 при его повороте на угол α (фиг. 2) из начального положения от ограничителя 39 в крайнее правое положение до упора в ограничитель 40, а установленный на поворотном суппорте 8 толкатель 19 смещается вдоль паза 22 в крышке тормоза 3 до упора и срабатывания микровыключателя 18 (смещение а, фиг. 2).
При экстренном торможении несущих винтов поворот толкателя 19, связанного с суппортом 8, и срабатывание микровыключателя 18, который выводит сигнал на приборную панель пилота о начале торможения несущих винтов, выполняется не от действия момента трения в зацеплении суппорта 8 с тормозным барабаном 6, а от механического усилия пружинного наконечника 24, действующего на рычаг тормоза 12. При этом обеспечивается возможность экстренного режима торможения, заданного допустимыми для включения тормоза частотой вращения и сокращенным временем торможения несущих винтов. Например, для вертолета Ка-226Т допустимая частота вращения несущих винтов при включении экстренного торможения несущих винтов на земле должна быть не более 50% по тахометру, а время до полного останова несущих винтов - не более 20 с.
Механическая система торможения несущих винтов вертолета имеет следующие особенности конструкции:
1. Суппорт тормоза несущих винтов с установленными тормозными колодками выполнен со ступицей, крышка тормоза выполнена с цапфой и связана с корпусом редуктора, ступица суппорта установлена соосно с цапфой и тормозным барабаном с возможностью поворота ее относительно цапфы совместно с тормозным барабаном при контакте (сцеплении) его с тормозными колодками.
2. Пружинный наконечник, связывающий рычаг управления торможением с рычагом тормоза выполнен в виде силового цилиндра с проушиной, связанной шарниром с рычагом тормоза, а в силовом цилиндре установлен подвижный шток с закрепленным к нему поршнем, связанным с торцом силового цилиндра пружиной сжатия.
3. Проводка, связывающая рычаг управления торможением с рычагом тормоза, выполнена в виде пушпульной тяги с возможностью передачи толкающего или растягивающего усилия от рычага управления торможением, действующего на силовой цилиндр через подвижный шток и связанные с ним поршень и пружину сжатия.
4. Рычаг управления торможением установлен на одном комбинированном пульте управления двигателями и тормозом несущих винтов с установленными на нем рычагами управления левым и правым двигателями вертолета.
Кинематика тормоза несущих винтов проверена на ЭЦМ (New SB Kinema.CATProduct), построенной в программе CATIA Р3 V5R17 (DMU Kinematics).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2652873C1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2023 |
|
RU2796557C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2019 |
|
RU2710993C1 |
| СТОЯНОЧНЫЙ ТОРМОЗ СНЕГОБОЛОТОХОДА | 2024 |
|
RU2828926C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ИЗМЕРЕНИЯ ТОРМОЗНОГО МОМЕНТА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОРМОЗНОГО МОМЕНТА | 2002 |
|
RU2281868C2 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2021 |
|
RU2777342C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК АНТИЮЗОВОЙ СИСТЕМЫ ТОРМОЖЕНИЯ АВИАЦИОННЫХ КОЛЕС | 1971 |
|
SU315649A1 |
| Дисковый тормоз | 1986 |
|
SU1323789A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| РУЧКА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2017 |
|
RU2652372C1 |
Изобретение относится к области авиации, в частности к конструкциям систем торможения несущих винтов. Механическая система торможения несущих винтов вертолета содержит рычаг управления торможением, крышку тормоза, тормозной барабан, суппорт, две тормозные колодки, рычаг тормоза, валик, связанный с рычагом тормоза и кинематически связанный с тормозными колодками, микровыключатель и проводку, связывающую рычаг управления торможением с рычагом тормоза. Механическая система торможения несущих винтов вертолета снабжена кронштейном с микровыключателем, закрепленными на крышке тормоза валиком, установленным на суппорте. Суппорт снабжен толкателем с возвратной пружиной. Крышка тормоза выполнена с цапфой и пазами под валик и толкатель. Суппорт выполнен с возможностью поворота цапфы совместно с тормозным барабаном при сцеплении его с тормозными колодками. Проводка связана с рычагом тормоза через пружинный наконечник, а рычаг управления торможением выполнен с возможностью фиксации его на пульте управления при сцеплении тормозных колодок с тормозным барабаном. Обеспечивается повышение надежности при эксплуатации вертолета и безопасности применения тормозных устройств системы привода несущих винтов вертолета при возникновении непредвиденных ситуаций. 3 з.п. ф-лы, 9 ил.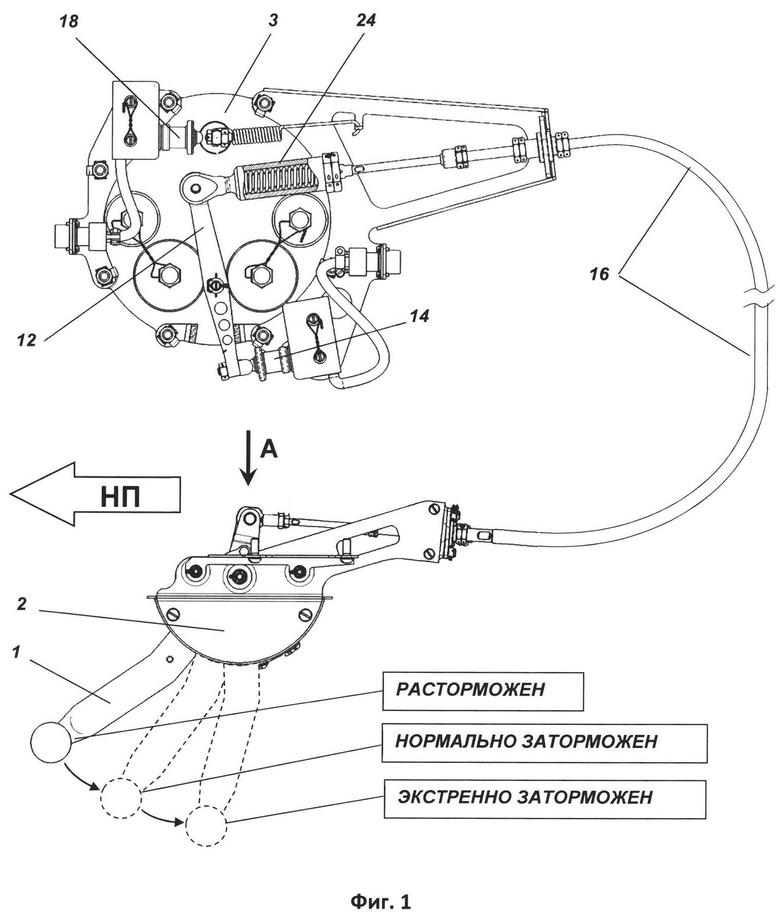
1. Механическая система торможения несущих винтов вертолета, содержащая рычаг управления торможением (1), установленный на пульте управления (2) в кабине экипажа, выполненный с возможностью фиксации его на пульте управления (2) в двух крайних положениях, крышку тормоза (3), выполненную с цапфой (4) и связанную с корпусом редуктора (5), тормозной барабан (6), связанный с валом привода тормоза (7), суппорт (8), две тормозные колодки (9), установленные на суппорте (8) на шарнирах (10) и соединенные между собой возвратными пружинами (11), рычаг тормоза (12), валик (13), связанный с рычагом тормоза (12) и кинематически связанный с тормозными колодками (9), микровыключатель (14), связанный с кронштейном (15), закрепленном к крышке тормоза (3), проводку (16), связывающую рычаг управления торможением (1) с рычагом тормоза (12), отличающаяся тем, что она снабжена дополнительно установленными конштейном (17) и микровыключателем (18), связанным с кронштейном (17), закрепленным к крышке тормоза (3), валик (13) установлен на суппорте (8) между шарнирами (10), суппорт (8) снабжен дополнительно установленным толкателем (19), связанным с кронштейном (15) дополнительно установленной возвратной пружиной (20), в крышке тормоза (3) выполнены дугообразные пазы (21, 22), в которых размещены валик (13) и толкатель (19), соответственно, суппорт (8) выполнен со ступицей (23) и установлен соосно с цапфой (4) и тормозным барабаном (6) с возможностью поворота ступицы (23) относительно цапфы (4) совместно с тормозным барабаном (6) при контакте (сцеплении) его с тормозными колодками (9), причем паз (22) ограничивает ход толкателя (19) с возможностью срабатывания микровыключателя (18) при контакте с толкателем (19), проводка (16) связана с рычагом тормоза (12) через дополнительно установленный пружинный наконечник (24), а рычаг управления торможением (1) выполнен с возможностью дополнительной фиксации его на пульте управления (2) в промежуточном положении в момент контакта (сцепления) тормозных колодок (9) с тормозным барабаном (6), поворота суппорта (8) относительно цапфы (4) и срабатывания микровыключателя (18) под действием толкателя (19).
2. Механическая система торможения несущих винтов вертолета по п. 1, отличающаяся тем, что пружинный наконечник (24) выполнен в виде силового цилиндра (25) с вилкой (26), связанной с рычагом тормоза (12) шарниром (27), а в силовом цилиндре (25) установлен подвижный шток (28) с закрепленным к нему поршнем (29), связанным с торцом (30) силового цилиндра (25) пружиной сжатия (31).
3. Механическая система торможения несущих винтов вертолета по п. 1, отличающаяся тем, что проводка (16), связывающая рычаг управления торможением (1) с рычагом тормоза (12), выполнена в виде пушпульной тяги с возможностью передачи толкающего или растягивающего усилия от рычага управления торможением (1), действующего на силовой цилиндр (25) через подвижный шток (28) и связанные с ним поршень (29) и пружину сжатия (31).
4. Механическая система торможения несущих винтов вертолета по п. 1, отличающаяся тем, что рычаг управления торможением (1) установлен на одном комбинированном пульте управления двигателями и тормозом несущих винтов (32) с установленными на нем рычагами (33) и (34) управления левым и правым двигателями вертолета.
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2652873C1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Руководство по технической эксплуатации | |||
| Книга II | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Системы вертолета | |||
| US 20050058536 A1, 17.03.2005 | |||
| EP 3480484 A1, 08.05.2019 | |||
| DE 19541193 C1, 14.11.1996. | |||

