Изобретение относится к робототехнике, а именно к конструкции приводов манипуляторов, обеспечивающих перемещение исполнительного органа в пространстве.
Известен привод робота (Авторское свидетельство Литвиненко A.M. СССР №1442394, опубл. 07.12.88, бюл. №45, заявка №4242358/31-08 от 11.05.87), который содержит установленные на рабочей зоне робота, в точках позиционирования схвата, неподвижную часть, выполненную в виде магнитопроводов, и подвижную часть с активными токопроводящими элементами, выполненную в виде якоря электрического двигателя, установленного на звене руки робота, где также установлен щеточный узел. Около якоря в плоскости, параллельно его оси, закреплена электрическая обмотка, образующая систему возбуждения для всех магнитопроводов. Рука робота установлена на поворотной колонне, расположенной на основании.
Недостатком элемента является малое усилие вращательного движения.
Этот недостаток устранен в промышленном роботе (Авторское свидетельство Литвиненко A.M. СССР №1805028, опубл. 30.03.93, бюл. №12, заявка №4822040/08 от 29.03.90), содержащем основание, катушку с сердечником и полюсными наконечниками. На них размещены узлы крепления цилиндрических направляющих. В воздушном зазоре расположены якорь приводов поворота, выдвижения и подъема. Все эти приводы установлены на основании. Имеются направляющие, на которых закреплен узел руки, квадратный стержень, пропущенный через отверстия в червячном редукторе. Направляющие пропущены через подшипники в стойках. Узел руки прикреплен к рейке привода выдвижения. Привод предназначен для горизонтального перемещения блока якорей по направляющим. На руке установлен подшипник. Вертикальная часть руки снабжена направляющей, проходящей через верхнюю обойму. Шестерня контактирует с рейкой, жестко закрепленной в нижнем кронштейне руки. На ней закреплен привод поворота схватов укрепленных на основании относительно оси. На основании укреплены схват с губками. Катушка образована каркасом и обмоткой. С направляющей контактирует подшипники. К основанию крепятся направляющие.
Недостатком данного устройства является сложность конструкторского исполнения, которая обусловлена необходимостью строгого соблюдения линейного размера.
Наиболее близким к заявленному по совокупности существенных признаков является исполнительный орган робота (Патент РФ Литвиненко A.M. №2250818, опубл. 27.04.2005, бюл. №12, заявка №2003124121/02 от 31.07.2003), состоящий из четырех гибких элементов, имеющих желобчатую форму. Элементы присоединены к крестовине с помощью шаровых шарниров. К середине крестовины прикреплен схват. Места крепления ленты к шарнирам выполнены в виде колодок, придающих зажатому концу ленты изгиб в поперечном сечении. На элементы одеты формостабилизирующие элементы, представляющие собой пластину с четырьмя прорезями, сделанными по форме изгиба элементов. Формостабилизирующие элементы присоединены к схвату при помощи тросовой гибкой связи с узлами. По мере выдвижения руки количество задействованных формостабилизирующих элементов увеличится. Вторые концы элементов пропущены через формообразующие направляющие и намотаны на барабан с приводами. Барабаны каждой степени подвижности установлены в каретке, движущейся по вертикальной поворотной колонне манипулятора. Формообразующие направляющие представляют собой брус из антифрикционного материала (фторопласта), на одной грани которого выполнена дугообразная прорезь, а недостатком данного устройства является небольшое усилие.
Изобретение направлено на повышение усилия и улучшение эксплуатационных характеристик.
Это достигается тем, что промышленный манипулятор, содержащий систему управления, исполнительный орган, основание, на котором установлен привод исполнительного органа, содержащий барабан с приводом, гибкий элемент и каретку, согласно изобретению привод исполнительного органа снабжен дополнительным барабаном с приводом, установленным на основании с основным барабаном, и направляющими со штоком, присоединенным к каретке и связанным с исполнительным органом манипулятора, при этом гибкий элемент намотан на основной и дополнительный барабаны, каретка выполнена с двумя группами роликов, каждая из которых расположена в контакте с гибким элементом основного и дополнительного барабанов и установлена между упомянутыми основным и дополнительным барабанами, приводы которых связаны с системой управления манипулятора.
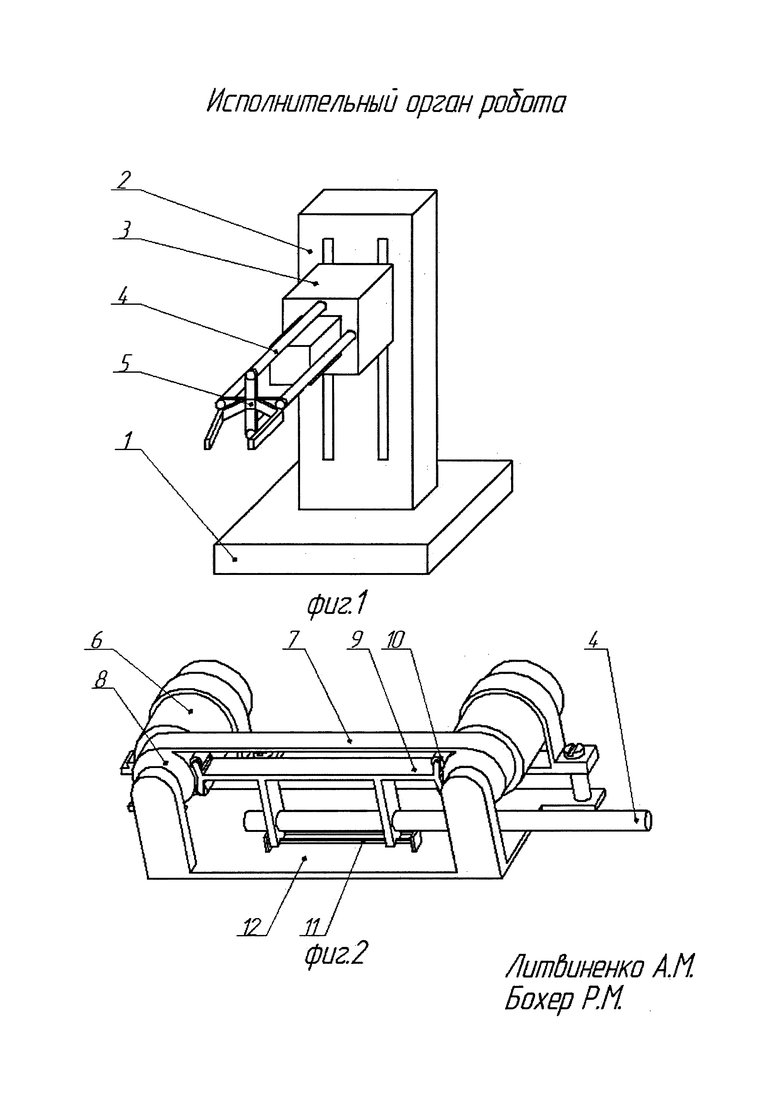
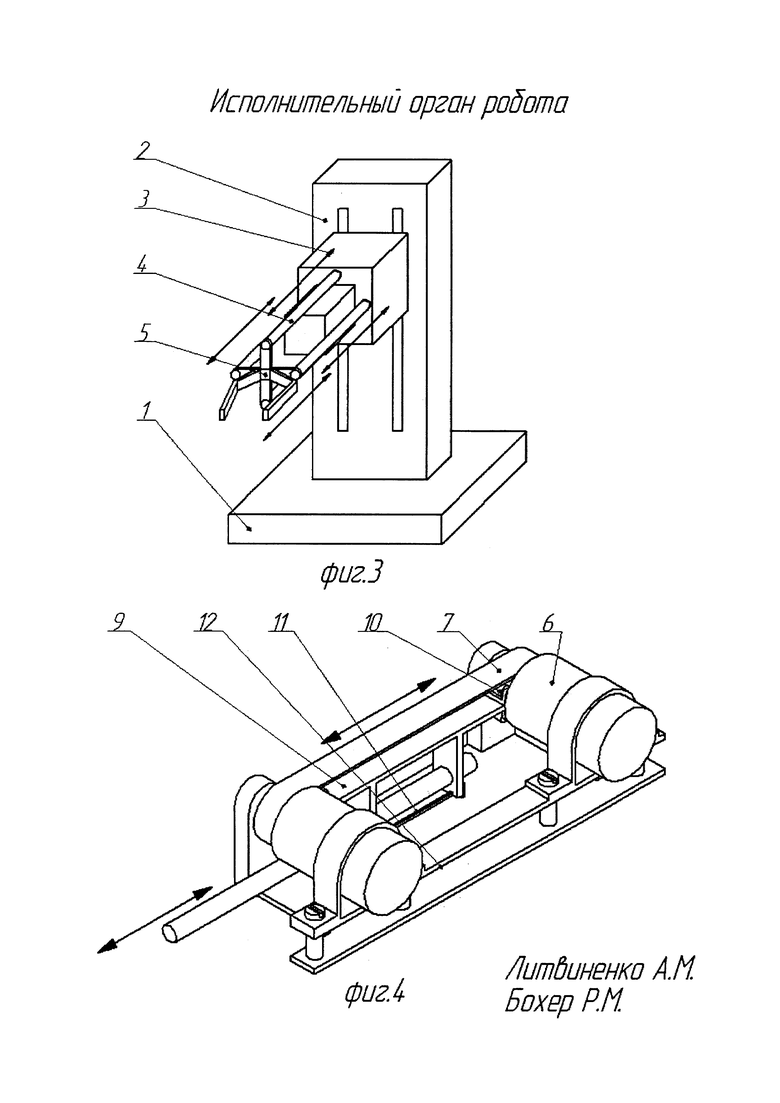
Изобретение иллюстрируется чертежом, где на фиг. 1 показан промышленный манипулятор в исходном состоянии, вид спереди. Барабаны и привод показаны на фиг. 2. Рабочее состояние промышленного манипулятора изображено на фиг. 3, а исполнительного органа робота - на фиг. 4.
Промышленный манипулятор содержит основание 1, подъемный механизм 2, к которому присоединен приводной блок 3. Из приводного блока выходят четыре штока 4, концы которых соединены со схватом 5. Приводной блок содержит в себе четыре промышленных привода, содержащие двигатели 6, гибкую ленту 7, намотанную на барабан 8. Между которыми расположена каретка 9 с роликами 10. Шток 4 зафиксирован направляющими 11. К валу двигателя подключены датчики перемещения (не указаны на чертеже). Все закреплено на основании промышленного манипулятора 12. В основании 1 расположена система управления (не указано на чертеже).
Исполнительный орган робота работает следующим образом. При вращении двигателей 6 гибкая лента наматывается на барабан, вследствие чего изменяется диаметр намотки. Каретка 9 с роликами 10 перемещается за счет изменения диаметра намотки, в зависимости от направления движения привода. Шток 4 соединен с кареткой, поэтому совершает аналогичное движение, приводя в действие промышленный манипулятор.
Введение в конструкцию дополнительного двигателя и системы управления позволяет увеличить усилие и улучшить эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2814591C1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
Изобретение относится к робототехнике. Промышленный манипулятор содержит систему управления, исполнительный орган, основание, на котором установлен привод исполнительного органа. Привод содержит барабан с приводом, гибкий элемент и каретку и снабжен дополнительным барабаном с приводом, установленным на основании с основным барабаном, и направляющими со штоком, присоединенным к каретке и связанным с исполнительным органом манипулятора. Гибкий элемент намотан на основной и дополнительный барабаны. Каретка выполнена с двумя группами роликов, каждая из которых расположена в контакте с гибким элементом основного и дополнительного барабанов и установлена между ними. Приводы связаны с системой управления манипулятора. Изобретение направленно на улучшение эксплуатационных характеристик исполнительного органа. 4 ил.
Промышленный манипулятор, содержащий систему управления, исполнительный орган, основание, на котором установлен привод исполнительного органа, содержащий барабан с приводом, гибкий элемент и каретку, отличающийся тем, что привод исполнительного органа снабжен дополнительным барабаном с приводом, установленным на основании с основным барабаном, и направляющими со штоком, присоединенным к каретке и связанным с исполнительным органом манипулятора, при этом гибкий элемент намотан на основной и дополнительный барабаны, каретка выполнена с двумя группами роликов, каждая из которых расположена в контакте с гибким элементом основного и дополнительного барабанов и установлена между упомянутыми основным и дополнительным барабанами, приводы которых связаны с системой управления манипулятора.
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Промышленный робот | 1990 |
|
SU1756142A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| US 20150120055 A1, 30.04.2015. | |||

