Изобретение относится к робототехнике, а точнее к исполнительным органам манипуляторов промышленных роботов, выполненным с использованием гибких элементов.
В [1] описана манипуляторная рука, снабженная большим количеством жестких одинаковых элементов, соединенных шарнирно. На эти элементы воздействуют приводные органы. Элемент, содержащий шаровой шарнир с крестовиной и четырьмя приводами поступательного движения, рассмотрен в [2].
Все манипуляторы, перечисленные выше, имеют один общий недостаток - невозможность изменения осевых габаритов руки, что увеличивает рабочее пространство манипулятора.
Наиболее близким по технической сущности является манипулятор [3].
Подвижная рука этого робота представляет собой гибкий металлорукав, один конец которого закреплен в подвижной каретке, а на другом конце расположена поворотная головка, положение которой ограничивается тросиками. Каретка может перемещаться с помощью приводов в вертикальном направлении, обеспечивая выдвижение металлорукава из направляющих.
Недостатком данного манипулятора является невысокая надежность, обусловленная большим числом кинематических пар, низкая грузоподъемность, не превышающая 110Н, малый радиус действия.
Изобретение направлено на повышение грузоподъемности и увеличение радиуса действия.
Это достигается тем, что исполнительный орган снабжен четырьмя гибкими лентами, приводными барабанами, формообразующими направляющими и формостабилизирующими элементами, при этом гибкие ленты изогнуты в поперечной плоскости посредством соответствующих формообразующих направляющих, одни их концы соединены с шарнирами крестовины, а другие намотаны на приводные барабаны, причем гибкие элементы размещены в прорезях формостабилизирующих элементов, соединенных с крестовиной посредством гибких элементов.
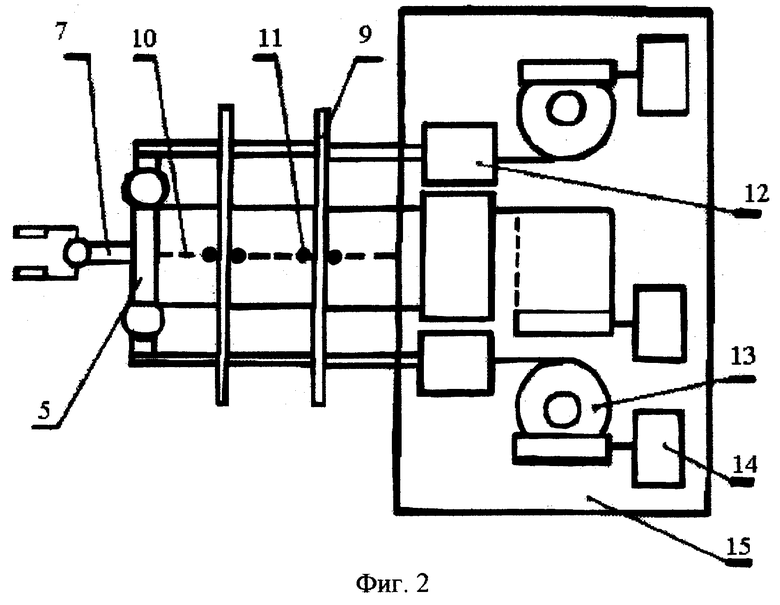
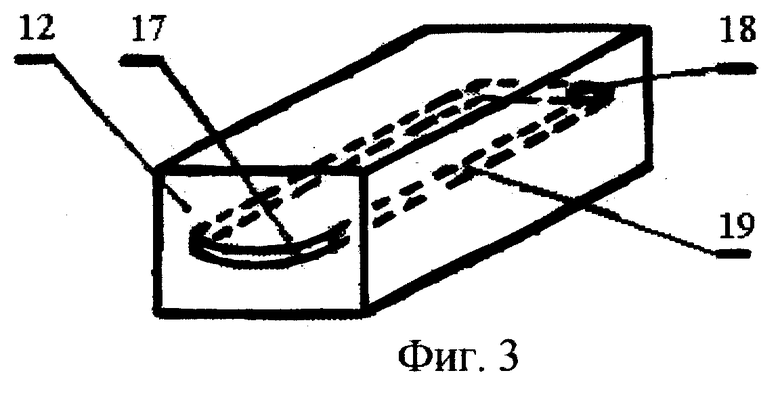
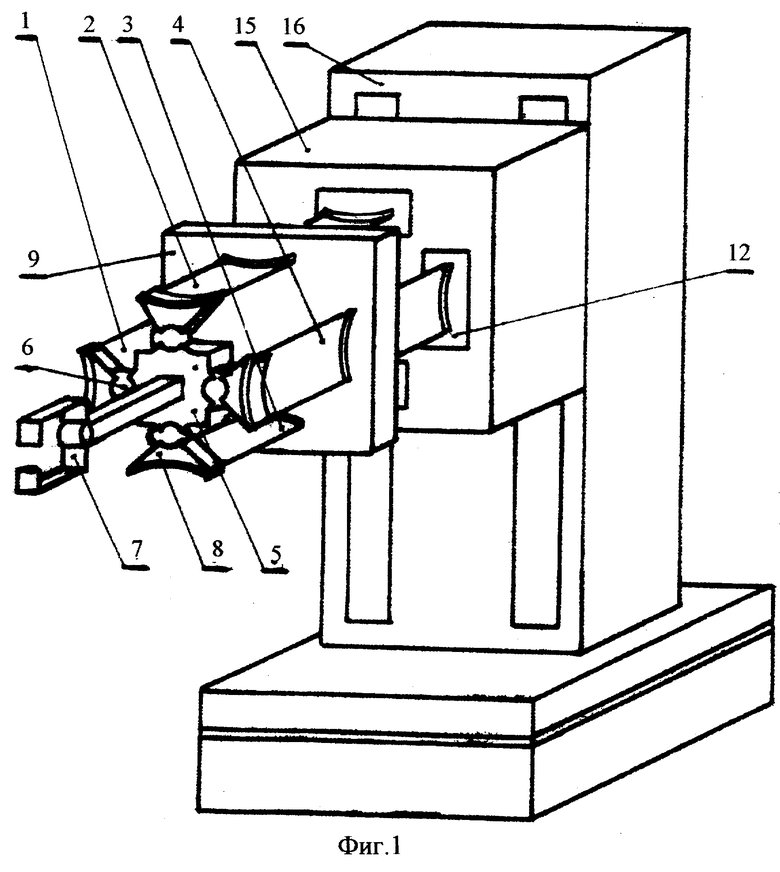
Сущность изобретения иллюстрируется чертежом, где на фиг.1 показано изометрическое изображение исполнительного органа, на фиг.2 показан вид сверху с кинематическими цепями намотки двух лент, на фиг.3 показан один из формостабилизирующих элементов.
Исполнительный орган (рука) робота состоит из четырех гибких лент 1, 2, 3, 4, имеющих желобчатую форму. Ленты присоединены к крестовине 5 с помощью шаровых шарниров 6. К середине крестовины прикреплен схват 7. Места крепления ленты к шарнирам выполнены в виде колодок 8, придающих зажатому концу ленты изгиб в поперечном сечении. На ленты одеты формостабилизирующие элементы 9, представляющие собой пластину с четырьмя прорезями, сделанными по форме изгиба лент. Формостабилизирующие элементы присоединены к схвату при помощи тросовой гибкой связи 10 с узлами 11. По мере выдвижения руки количество задействованных формостабилизирующих элементов увеличивается. Вторые концы лент пропущены через формообразующие направляющие 12 и намотаны на барабан 13 с приводами 14. Барабаны установлены в каретке 15, движущейся по вертикальной поворотной колонне 16 манипулятора. Формообразующие направляющие 12 представляют собой брус из антифрикционного материала (фторопласта), на одной грани которого выполнена дугообразная прорезь 17, а на другой - прямая прорезь 18. Прорези плавно соединены между собой каналом 19.
Исполнительный орган работает следующим образом. В исходном положении ленты 1, 2, 3, 4 намотаны на барабаны 13. Вылет руки минимальный и определяется лишь толщиной формостабилизирующих элементов, расположенных между формообразующими направляющими 12 и крестовиной 5. Команда на выдвижение руки запускает привода 14, барабаны 13 начинают раскручиваться, сматывая ленты 1, 2, 3, 4. Ленты, пройдя формообразующие направляющие 12, приобретают вогнутую форму, что способствует жесткости руки. По мере выдвижения происходит расстановка стабилизаторов 9 равномерно по длине руки с помощью троса 10. При необходимости обеспечить схвату наклон вверх-вниз или поворот вправо-влево приводы 14 работают не в согласованном (транспортном) режиме, а отдельно (в ориентирующем) режиме. Так, например, при наклоне вниз лента 2 выдвигается, лента 3 наматывается, ленты 1 и 4 неподвижны. При необходимости совершить поворот влево (смотря от колонны 16 к схвату 7) ленты 2 и 3 неподвижны, лента 4 убирается, лента 1 выдвигается. Такая двухстепенная подвижность обеспечивается шарнирами 6 крестовины 5. При движения схвата к колонне 16 ленты наматываются на барабаны, крестовина 5, упираясь в элементы 9, стягивает их к формообразующим направляющим 12 до упора. Затем процесс повторяется.
К технико-экономическим преимуществам заявленного органа следует отнести:
1. Повышение надежности за счет малого числа кинематических пар, отсутствия зоны холостого консольного вылета за колонной, зон шарнирных сочленений выше или ниже руки.
2. Повышение грузоподъемности (по сравнению с прототипом) за счет большой жесткости деформированной ленты.
3. Увеличение хода руки по сравнению с прототипом также за счет увеличенной жесткости руки, представляющей собой фактически коробчатую консольную форму с раскосами, имеющую большую изгибную жесткость, чем труба (у прототипа).
Источники информации
1. Заявка ФРГ № 1531252 “Исполнительный орган робота” от 13.07.67.
2. А.с. СССР № 393083 - Механизм шарнира манипулятора / В.Д.Абегауз, опуб.БИ №33 1973.
3. Белянин П.И. Промышленные роботы. - М.: Машиностроение, 1975, с.80283.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2814591C1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Манипулятор гибкий | 2016 |
|
RU2641602C2 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
Изобретение относится к робототехнике, точнее к исполнительным органам манипуляторов промышленных роботов, выполненных с использованием гибких элементов. Сущность изобретения заключается в том, что исполнительный орган снабжен четырьмя гибкими лентами, приводными барабанами, формообразающими направляющими и формостабилизирующими элементами. Гибкие ленты изогнуты в поперечной плоскости посредством соответствующих формообразующих направляющих, одни их концы соединены с шарнирами крестовины, а другие намотаны на приводные барабаны. Гибкие ленты размещены в прорезях формостабилизирующих элементов, соединенных с крестовиной посредством гибких элементов. Технический результат изобретения состоит в повышении надежности исполнительного органа робота, а также повышении его грузоподъемности. 3 ил.
Исполнительный орган робота, содержащий каретку с приводами, гибкие элементы, крестовину с шарнирами и схват, закрепленный на крестовине, отличающийся тем, что он снабжен четырьмя гибкими лентами, приводными барабанами, формообразующими направляющими и формостабилизирующими элементами, при этом гибкие ленты изогнуты в поперечной плоскости посредством соответствующих формообразующих направляющих, одни их концы соединены с шарнирами крестовины, а другие намотаны на приводные барабаны, причем гибкие ленты размещены в прорезях формостабилизирующих элементов, соединенных с крестовиной посредством гибких элементов.
| БЕЛЯНИН П.И | |||
| "Промышленные роботы", Москва, Машиностроение, 1975, с.80-83 | |||
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| US 4632631 A, 30.12.1986 | |||
| DE 19719931 A1, 01.10.1998. | |||

