Изобретение относится к робототехнике, а именно к конструкции электроприводов, обеспечивающих перемещение исполнительного органа в пространстве.
Известен исполнительный орган робота (Патент РФ Литвиненко A.M. №2250818, опубл. 27.04.2005, бюл. №12, заявка №2003124121/02 от 31.07.2003), состоящий из четырех гибких элементов, имеющих желобчатую форму. Элементы присоединены к крестовине с помощью шаровых шарниров. К середине крестовины прикреплен схват. Места крепления ленты к шарнирам выполнены в виде колодок, придающих зажатому концу ленты изгиб в поперечном сечении. На элементы одеты формостабилизирующие элементы, представляющие собой пластину с четырьмя прорезями, сделанными по форме изгиба элементов. Формостабилизирующие элементы присоединены к схвату при помощи тросовой гибкой связи с узлами. По мере выдвижения руки количество задействованных формостабилизирующих элементов увеличится. Вторые концы элементов пропущены через формообразующие направляющие и намотаны на барабан с приводами. Барабаны каждой степени подвижности установлены в каретке, движущейся по вертикальной поворотной колонне манипулятора. Формообразующие направляющие представляют собой брус из антифрикционного материала (фторопласта), на одной грани которого выполнена дугообразная прорезь, а недостатком данного устройства является небольшое усилие, развиваемое приводом.
Также известен исполнительный орган робота (Патент РФ Литвиненко A.M. Бохер Р.М. №2653397, опубл. 08.05.2018, бюл. №13, заявка №2015149070 от 16.11.2015), состоящий из привода исполнительного органа снабженного дополнительным барабаном с приводом, установленным на основании с основным барабаном, и направляющими со штоком, присоединенным к каретке и связанным с исполнительным органом манипулятора, при этом гибкий элемент намотан на основной и дополнительный барабаны, каретка выполнена с двумя группами роликов, каждая из которых расположена в контакте с гибким элементом основного и дополнительного барабанов и установлена между упомянутыми основными барабанами, приводы которых связаны с системой управления манипулятора.
Недостатком данного устройства является большие габариты, поскольку барабаны разнесены на длину каретки, а также невозможность реализации поворотного перемещения без применения дополнительных рычагов.
Наиболее близким к заявленному по совокупности существенных признаков является исполнительный орган рулевого привода (Патент РФ Литвиненко А.М. Крылов Ю.М, Агапов А.А. и др. №2759348, опубл. 12.11.2021, бюл. №32, заявка №2020141450 от 15.12.2020), состоящий из основания, двигателей, гибкой ленты, намотанной на барабаны, в контакте с барабанами расположены контактные подшипники, закрепленные на балансирах, рулевая плоскость зафиксирована на оси, установленной в корпусе летательного аппарата (не показано на чертеже), балансиры соединены с рулевой плоскостью с помощью стойки поворотного элемента, которая жестко соединена с рулевой плоскостью.
Недостатком данного изобретения является необходимость использования тормозного режима на одном из электродвигателей при перемещении рулевой плоскости, с целью сохранения натяжения ленты.
Изобретение направлено на улучшение эксплуатационных характеристик.
Это достигается тем, что исполнительный механизм рулевого привода, содержащий барабаны с приводом, контактные подшипники с несущими элементами, основание, согласно изобретению к валам вращения барабанов установлена механическая передача, позволяющая использовать один электродвигатель.
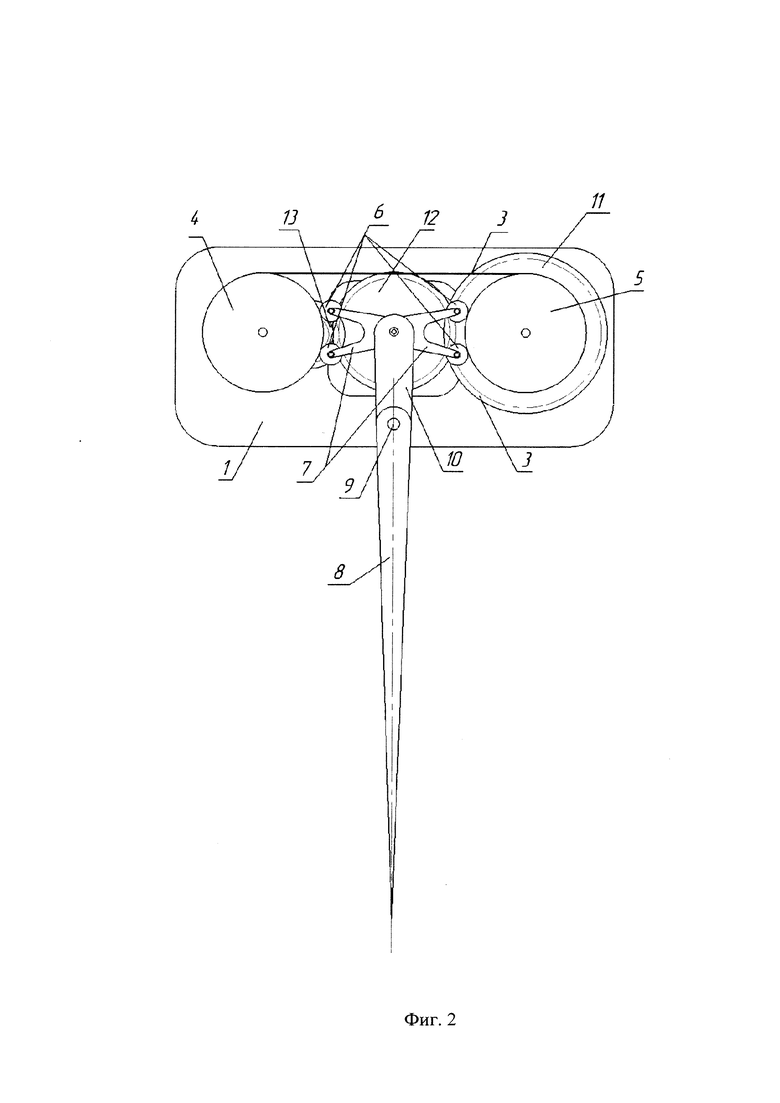
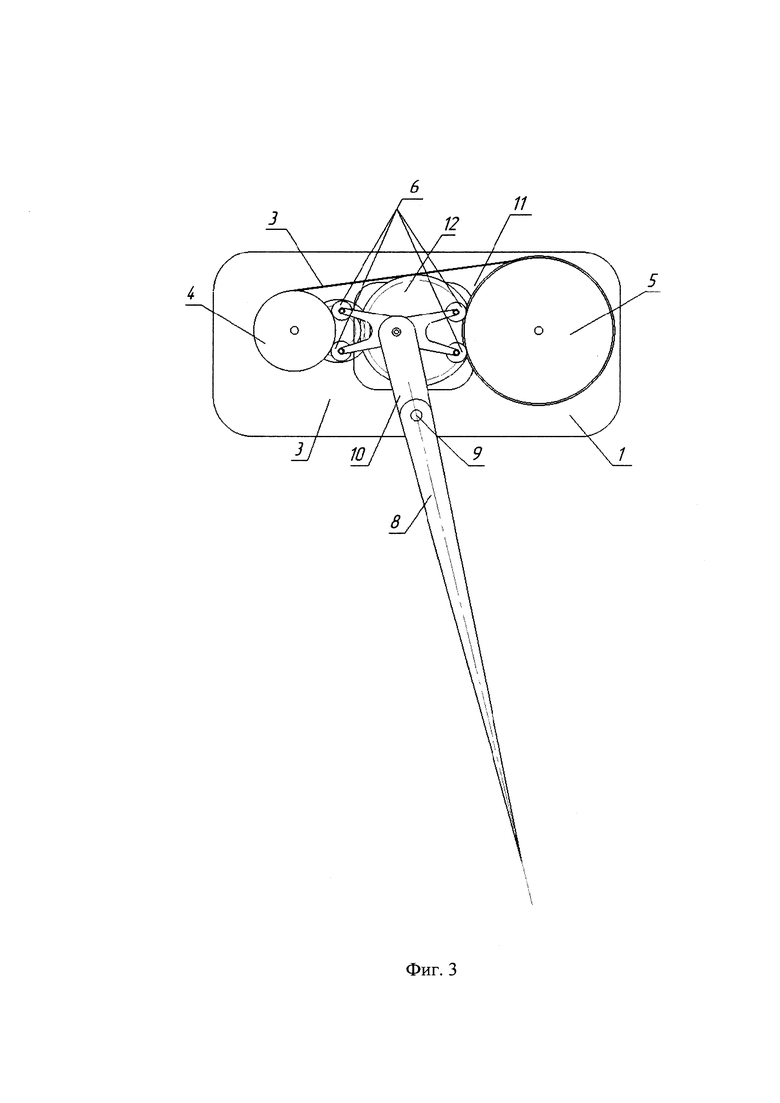
Сущность изобретение иллюстрируется чертежом, где на фиг 1 представлена структурная схема следящего электропривода с барабанно-роликовым исполнительным механизмом на фиг 2 представлен вид исполнительного элемента сверху в среднем положении рулевой плоскости, на фиг 3 вид сверху в крайнем левом положении, на фиг 4 вид сзади без одной гибкой ленты.
Следящий электропривод содержит в себе усилители мощности, приводной блок, редуктор датчика, а также датчик положения.
Приводной блок содержит в себе основание 1, двигатель 2, гибкую ленту 3, намотанную на барабаны 4 и 5. В контакте с барабанами расположены контактные подшипники 6, закрепленные на балансирах 7. Рулевая плоскость 8 зафиксирована на оси 9, установленной в корпусе летательного аппарата. Балансиры 7 соединены с рулевой плоскостью с помощью стойки поворотного элемента 10, которая жестко соединена с рулевой плоскостью 8. На оси 9 установлен датчик положения рулевой плоскости 8 (не указан на чертеже). На валу электродвигателя установлена шестерня 11, механически соединенная с шестернями 12 и 13 вращающимися в противоположные стороны. С целью изменения направления вращения одной шестерни к валу шестерни 13 установлен дополнительный блок из шестерен 14 и 15, а также демпфер 16, необходимый для сглаживания негативного влияния люфта редуктора с учетом внешних возмущений.
Приводной блок рулевого электропривода работает следующим образом. При поступлении сигнала задания (Uзад) и увеличении сигнала рассогласования между сигналом задания и сигналом с датчика положения (Uдп) происходит увеличение скважности ШИМ-сигналов, что приводит к вращению электродвигателя 2, гибкая лента 3 сматывается, и наматывается на барабаны 4 и 5, вследствие чего изменяется внешний диаметр барабанов. При изменении диаметра барабанов 4 и 5 происходит перемещение контактных подшипников 6, которые закреплены на балансирах 7, которые в свою очередь подвижно соединены со стойкой поворотного элемента 10, которая жестко соединена с рулевой плоскостью 8, вследствие чего при изменении диаметров барабанов 4 и 5 происходит перемещение рулевой плоскости.
Приводной блок рулевого электропривода имеет следующие технические преимущества: уменьшенные габаритные показатели и увеличенный коэффициент полезного действия (КПД), за счет отказа от использования второго электродвигателя, и как следствие уменьшение силовой части блока управления. Следствием этих технических преимуществ является с одной стороны увеличение КПД электропривода, с другой стороны расширение области применения за счет возможности вращательного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2814591C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Тормоз кривошипного пресса | 2021 |
|
RU2769479C1 |
| Устройство для замены ленты на конвейере | 1978 |
|
SU941251A1 |
| Устройство для автоматического вождения тракторов при испытании на треке | 1981 |
|
SU957781A1 |


Изобретение относится к электротехнике, а именно к конструкции электроприводов, обеспечивающих перемещение исполнительного органа в пространстве. Техническим результатом заявленного изобретения является уменьшение габаритов и увеличение КПД, за счет отказа от использования второго электродвигателя, и, как следствие, уменьшение силовой части блока управления. Следящий электропривод содержит в себе усилители мощности, приводной блок, редуктор датчика, а также датчик положения. Приводной блок содержит в себе основание, двигатель, гибкую ленту, намотанную на барабаны. В контакте с барабанами расположены контактные подшипники, закрепленные на балансирах. Рулевая плоскость зафиксирована на оси, установленной в корпусе летательного аппарата. Балансиры соединены с рулевой плоскостью с помощью стойки поворотного элемента, которая жестко соединена с рулевой плоскостью. На оси установлен датчик положения рулевой плоскости. На валу электродвигателя установлена шестерня, механически соединенная с шестернями, вращающимися в противоположные стороны. С целью изменения направления вращения одной шестерни к валу шестерни установлен дополнительный блок из шестерен, а также демпфер, необходимый для сглаживания негативного влияния люфта редуктора с учетом внешних возмущений. 4 ил.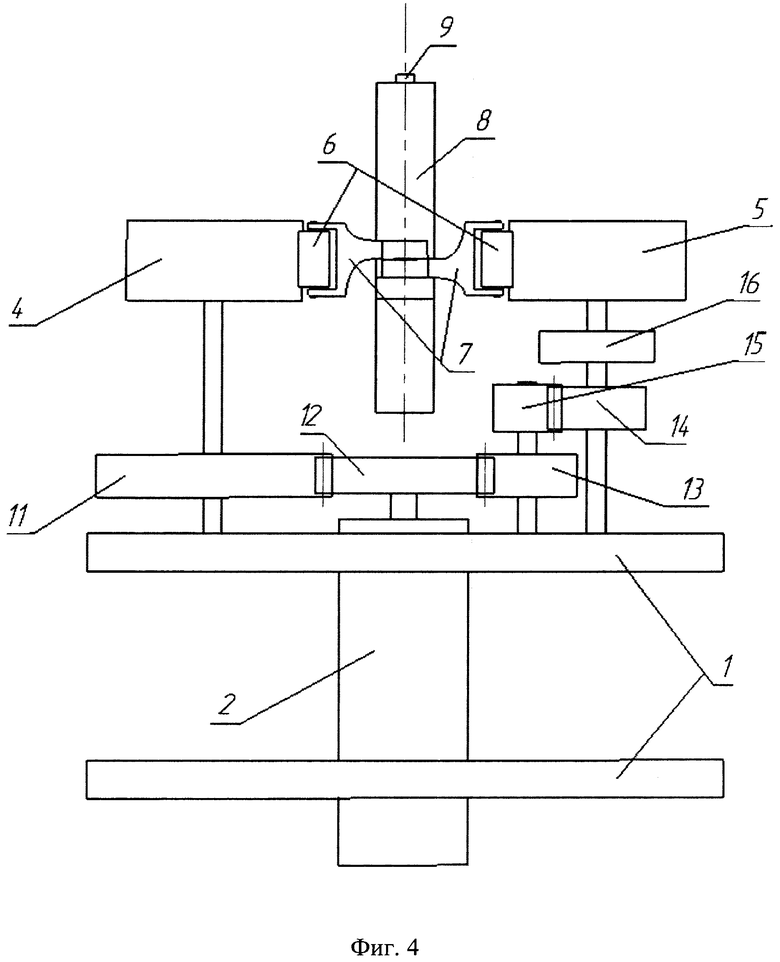
Следящий электропривод с барабанно-роликовым исполнительным элементом содержащий усилители мощности, датчик положения с приборным редуктором и приводной блок, отличающийся тем, что приводной блок содержит в себе основание, двигатель, гибкую ленту, намотанную на барабаны, в контакте с барабанами расположены контактные подшипники, закрепленные на балансирах, которые соединены с рулевой плоскостью с помощью стойки поворотного элемента, при этом стойка поворотного элемента жестко соединена с рулевой плоскостью, которая в свою очередь зафиксирована на оси, на которой установлен датчик положения рулевой плоскости, при этом на валу электродвигателя установлена первая шестерня, механически соединенная со второй и третьей шестернями, вращающимися в противоположные стороны, а к валу третьей шестерни установлен дополнительный блок из четвертой и пятой шестерен, а также демпфер для сглаживания негативного влияния люфта редуктора с учетом внешнего возмущения.
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| US 4793576 A, 27.12.1988 | |||
| US 5908177 A, 01.06.1999 | |||
| FR 3001707 A1, 08.08.2014 | |||
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
