ff-ff
Од
10
1U37220
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых 11ЛЯ выполнения подъемно- транспортных, монтажно-сборочных и технологических операций, а также в цистанц юнных манипуляторах.
Целью изобретения является расширение зоны обслуживания за счет уве- личения вылета и конфигурации меха- нической руки.
На фиг, 1 изображен исполнительньш орган промышленного робота, обгций вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид А на фиг. 1 (исполнительный орган в сложенном виде); на фиг. 4 - разрез Б-Б на фиг. 1; на фигФ5 - сечение В-В на фиг. 4.
Исполнительный орган промьшшенно- го робота содержит корпус 1, внутри которого размещены основные барабаны 2 и дополнительные барабаны 3, свя- занные с приводами 4 и 5, например
вр во и на ли эт сх к ни те 3 но мо 5 ле По дв ни пр но ни ет не по
20
0
вращении основных барабанов 2 от приводов 4 упругие ленты 6 сматываются и выталкиваются из корпуса 1 через направляющий механизм 8, образуя удлинитель 7, которьй вьщвигается, при этом направляющие элементы 9 и 10 и схват 13 располагаются вплотную друг к другу и вьодвигаются вместе с удлинителем. Это движение происходит до тех пор, пока дополнительный барабан 3 с закрепленным тросиком 11 не остановит свое вращение посредством тормоза в приводе 5, определяя длину вы- 5 лета удлинителя 7 в этом направлении. После того как колено 9 перестанет двиг-аться, начинается движение удлинителя 7 сквозь колено 9 через направляющее отверстие, при этом колено 10,и схват 13 двигаются вместе с ним, а тросик 12 свободно разматывается, проходя через отверстие в колене 9. Это движение совершается до тех пор, пока дополнительный барабан 3 с
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |


Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, при- меняемьк для вьтолнения подъемно- транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах. Целью изобретения является расширение зоны обслуживания за счет увеличения выпета и конфигурации маханической руки. Для этого в корпусе 1 исполнительного органа промышленного робота размещены основные 2 и дополнительные 3 барабаны, связанные с приводами 4 и 5. На основных барабанах 2 закреплены упругие ленты 6, образующие механическую руку (удлинитель) 7, другие концы этих лент связаны между собой. У/утинитель 7 проходит сквозь направляющий механизм 8, установленньй на корпусе 1, и направляющие элементы (колена) 9 и 10, образующая поверхность отверстий которых выполнена криволинейной, что позволяет дополнительно изгибать удлинитель-. Направ-. ,., ляющий элемент 9 связан с гибкой тягой 11, другой конец которой закреплен на одном из дополнительных барабанов 3 с возможностью наматьшания на него и сматывания, 5 ил. (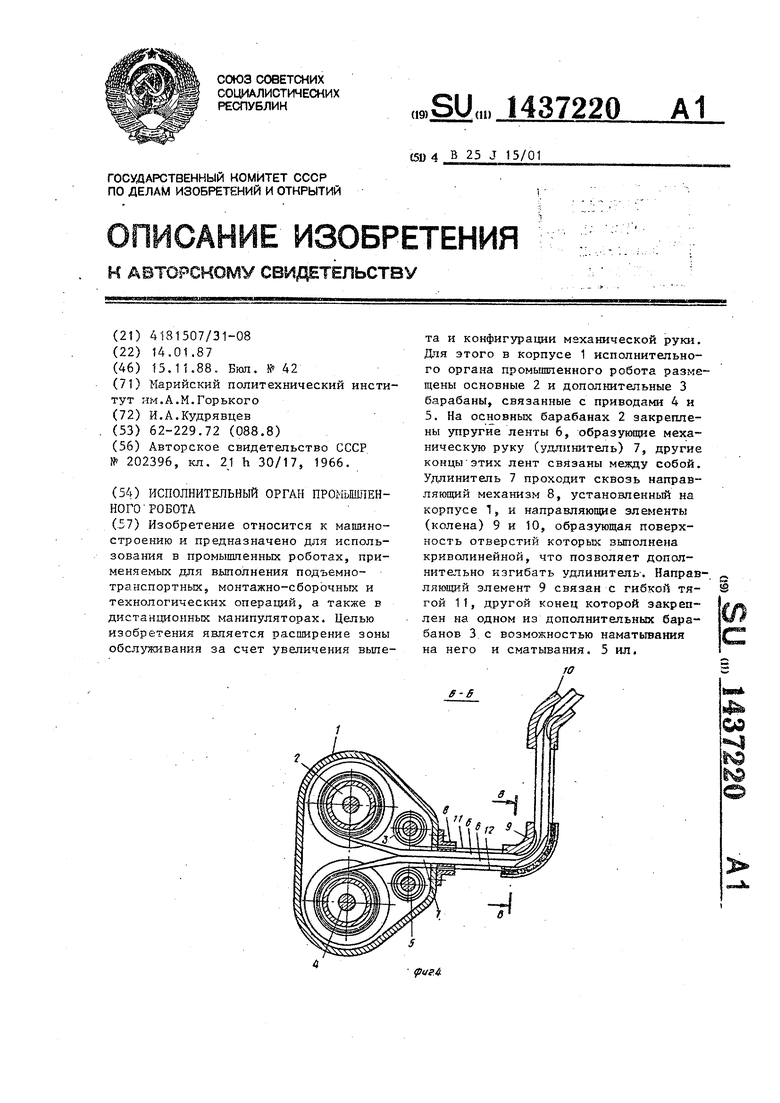
электродвигателями. На основных бара-25 закрепленным тросиком 12 не остановит банах 2 закреплены упругие стальные свое вращение посредством тормоза в ленты б, образующие механическую руку .приводе 5, определяя длину вылета уд- (удлинитель) 7, другие концы этих лент - линителя 7 в этом направлении. После связаны между, собой. Удлинитель 7 про- того, как колено 10 перестанет дви- ходит сквозь направляющий механизм 8, 30 гаться, у,о;линитель 7 начинает движеустановленньй на корпусе 1, и направляющие элементы (колена) 9 и 10, образующая поверхность отверстий которых выполнена криволинейной, чт.о позволяет дополнитапьно изгибать удлинитель. Направляющий элемент 9 связан с гибкой тягой, например тросиком 11, другой конец которой.закреплен на одном из дополнительных барабанов 3 с возможностью наматывания на него и сматывания.
Направляющий элемент 10 связан с гибкой тягой (тросиком) 12, проходящей сквозь направляющий элемент 9
через отверстие, другой конец которо- ляющий механизм 8 и колено 9, затем го закреплен на другом дополнитель- колено 9 и колено 10, затем колено ном барабане 3 с возможностью наматы- IQ схват 13 вания на него или сматывания.
10и схват 13 с зажатой заготовкой. Изменив величины сматывания тросиков
Н-а конце механической руки, (удлинителе) 7 закреплен схват 13.
Исполнительньм орган промышленного робота работает следующим образом.
В исходном состоянии упругие ленты б намотаны на основные барабаны 2, при этом направляющий механизм 8, на- правляющие элементы 9, 10 и схват 13 располагаются вплотную друг к другу, гибкие тяги (тросики) 11 и 12 намотаны на дополнительные барабаны 3. При
5
0
ние сквозь колено 10 через направляющее отверстие, неся на себе схват 13. Это движение происходит до требуемой координаты, затем останавливается вращение основных барабанов 2. Схват 13 захватывает заготовку. Основные барабаны 2 начинают наматывать на себя упругую ленту 6, и одновременно тросики 11 и 12 наматываются на дополнительные барабаны 3. I
Возврат удлинителя 7 со всеми его
элементами в исходное положение осуществляется в следующей последовательности: сначала смыкаются направляющий механизм 8 и колено 9, затем колено 9 и колено 10, затем колено IQ схват 13
10и схват 13 с зажатой заготовкой. Изменив величины сматывания тросиков
11и 12 с дополнительных барабанов 3, определяют координаты, куда необходимо доставить заготовку.
Формула изобретения
Исполнительный орган промьшшенно- го робота, содержащий корпус, механическую руку, выполненную в виде двух упругих лент, закрепленных одними концами на основных приводных барабанах,
3143
/станонленных в корпусе, а другими связанными между собой, и проходящих через направляющий механизм, размещенный на корпусе, а также направляющие элементы, установленные на механической руке и жестко связанные с одними концами гибких тяг, отличающийся тем, что, с целью
k 5
в ид А
7220
расиирения зоны обслуживания за счет увеличения -выпета и конфигурации ме- ханический руки, он снабжен дополнительными приводными барабанами, связанными с другими концами гибких тяг, при этом образующая поверхности отверстия направляющего элемента выполнена криволинейной.
10
«Рие. ;
/J
Фиг. Z
qjuS. 5
J2 9
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 0 |
|
SU202396A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
