Изобретение относится к робототехнике, а именно к конструкции электроприводов, обеспечивающих перемещение исполнительного органа в пространстве.
Известен исполнительный орган робота (Патент РФ Литвиненко A.M. №2250818, опубл. 27.04.2005, бюл. №12, заявка №2003124121/02 от 31.07.2003), состоящий из четырех гибких элементов, имеющих желобчатую форму. Элементы присоединены к крестовине с помощью шаровых шарниров. К середине крестовины прикреплен схват. Места крепления ленты к шарнирам выполнены в виде колодок, придающих зажатому концу ленты изгиб в поперечном сечении. На элементы одеты формостабилизирующие элементы, представляющие собой пластину с четырьмя прорезями, сделанными по форме изгиба элементов. Формостабилизирующие элементы присоединены к схвату при помощи тросовой гибкой связи с узлами. По мере выдвижения руки количество задействованных формостабилизирующих элементов увеличится. Вторые концы элементов пропущены через формообразующие направляющие и намотаны на барабан с приводами. Барабаны каждой степени подвижности установлены в каретке, движущейся по вертикальной поворотной колонне манипулятора. Формообразующие направляющие представляют собой брус из антифрикционного материала (фторопласта), на одной грани которого выполнена дугообразная прорезь, а недостатком данного устройства является небольшое усилие, развиваемое приводом.
Также известен исполнительный орган робота (Патент РФ Литвиненко A.M. Бохер Р.М. №2653397, опубл. 08.05.2018, бюл. №13, заявка №2015149070 от 16.11.2015), состоящий из привода исполнительного органа снабженного дополнительным барабаном с приводом, установленным на основании с основным барабаном, и направляющими со штоком, присоединенным к каретке и связанным с исполнительным органом манипулятора, при этом гибкий элемент намотан на основной и дополнительный барабаны, каретка выполнена с двумя группами роликов, каждая из которых расположена в контакте с гибким элементом основного и дополнительного барабанов и установлена между упомянутыми основными барабанами, приводы которых связаны с системой управления манипулятора.
Недостатком данного устройства является большие габариты, поскольку барабаны разнесены на длину каретки, а также невозможность реализации поворотного перемещения без применения дополнительных рычагов.
Наиболее близким к заявленному по совокупности существенных признаков является исполнительный орган рулевого привода (Патент РФ Литвиненко А.М. Крылов Ю.М., Агапов А.А. и др. №2759348, опубл. 12.11.2021, бюл. №32, заявка №2020141450 от 15.12.2020), состоящий из основания, двигателей, гибкой ленты, намотанной на барабаны, в контакте с барабанами расположены контактные подшипники, закрепленные на балансирах, рулевая плоскость зафиксирована на оси, установленной в корпусе летательного аппарата (не показано на чертеже), балансиры соединены с рулевой плоскостью с помощью стойки поворотного элемента, которая жестко соединена с рулевой плоскостью.
Недостатком данного изобретения является необходимость использования тормозного режима на одном из электродвигателей при перемещении рулевой плоскости, с целью сохранения натяжения ленты.
Изобретение направлено на улучшение эксплуатационных характеристик.
Это достигается тем, что исполнительный орган рулевого привода, содержащий барабаны с приводом, контактные подшипники с несущими элементами, основание, согласно изобретению несущие элементы подшипников выполнены в виде балансиров, установленных на стойке поворотного элемента, жестко закрепленного с рулевой плоскостью.
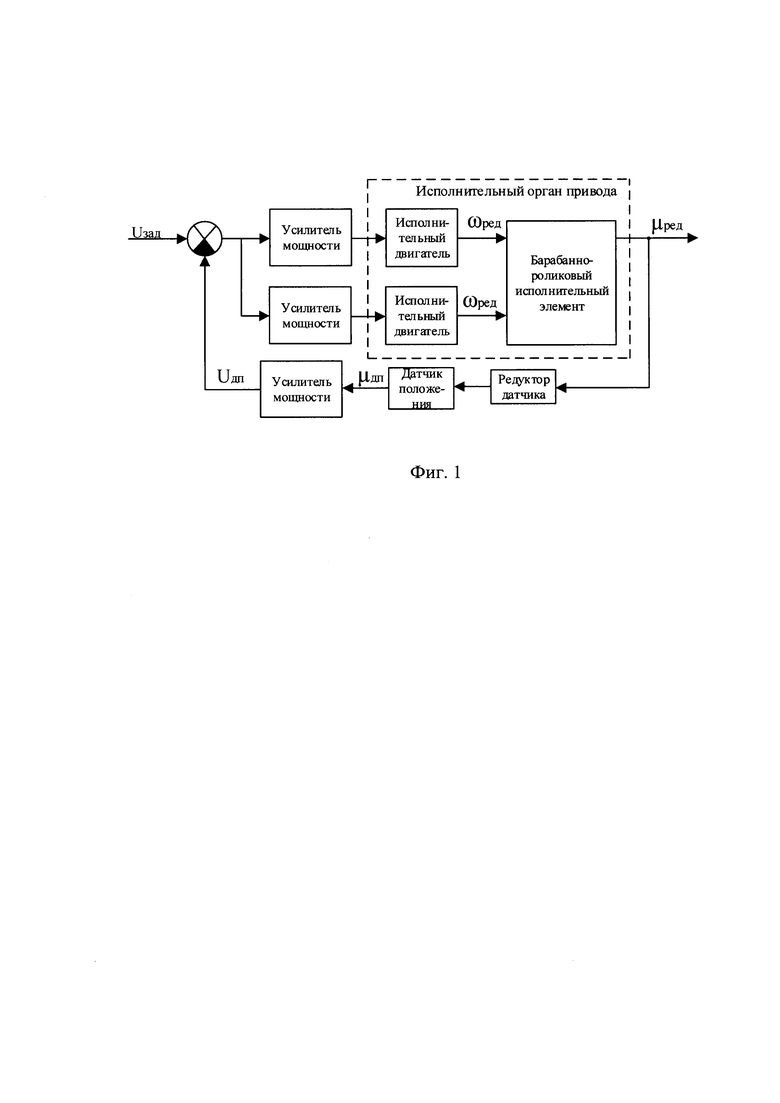
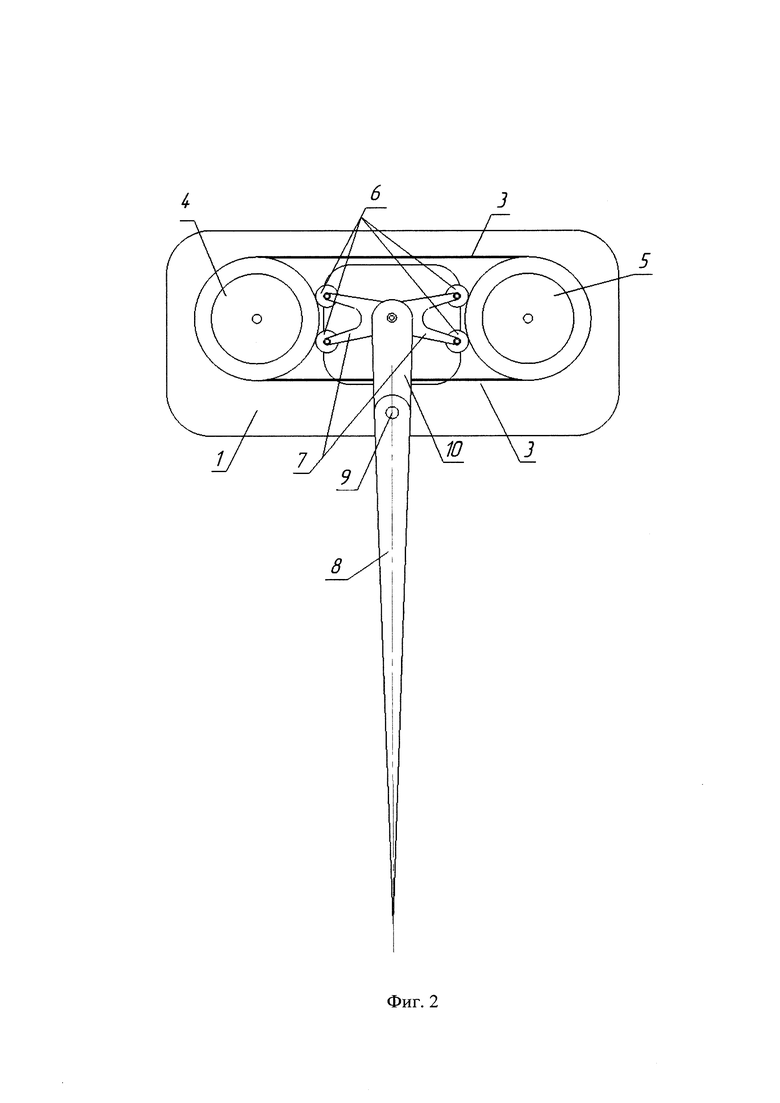
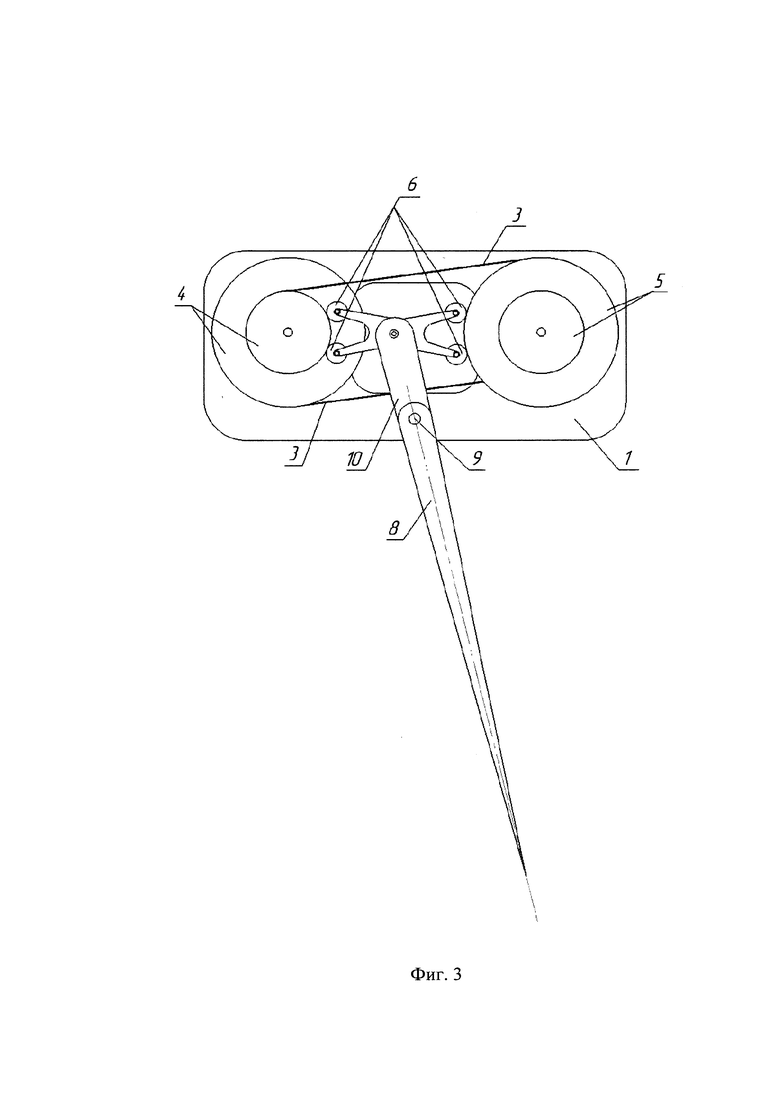
Сущность изобретение иллюстрируется чертежом, где на фиг 1 представлена структурная схема следящего электропривода с барабанно-роликовым исполнительным элементом на фиг 2 представлен вид исполнительного элемента сверху в среднем положении рулевой плоскости, на фиг 3 вид сверху в крайнем левом положении, на фиг 4 вид сзади без одной гибкой ленты.
Следящий электропривод содержит в себе усилители мощности, приводной блок, редуктор датчика, а также датчик положения.
Исполнительный орган содержит в себе основание 1, двигатели 2, гибкие ленты 3, намотанные на барабаны 4 и 5. В контакте с барабанами расположены контактные подшипники 6, закрепленные на балансирах 7. Рулевая плоскость 8 зафиксирована на оси 9, установленной в корпусе летательного аппарата. Балансиры 7 соединены с рулевой плоскостью с помощью стойки поворотного элемента 10, которая жестко соединена с рулевой плоскостью 8. На оси 9 установлен датчик положения рулевой плоскости 8 (не указан на чертеже). Натяжение дополнительной ленты регулируется подпружиненным роликом, установленным на основании 1(не указано на чертеже).
Исполнительный орган рулевого электропривода работает следующим образом. При поступлении сигнала задания (Цзад) и увеличении сигнала рассогласования между сигналом задания и сигналом с датчика положения (Цдп) происходит увеличение скважности ШИМ-сигналов, что приводит к вращению электродвигателей 2, гибкие ленты 3 сматываются, и наматывается на барабаны 4 и 5, вследствие чего изменяется внешний диаметр барабанов, причем контактные подшипники 6 с балансирами 7 установлены, только к одной (основной) ленте. При изменении диаметра барабанов 4 и 5 происходит перемещение контактных подшипников 6, которые закреплены на балансирах 7, которые в свою очередь подвижно соединены со стойкой поворотного элемента 10, которая жестко соединена с рулевой плоскостью 8, вследствие чего при изменении диаметров барабанов 4 и 5 происходит перемещение рулевой плоскости.
Исполнительный орган имеет следующие технические преимущества: увеличение коэффициента полезного действия (КПД) за счет установки двух лент 3, намотанных в противоположных направлениях, что позволяет использовать мощность двух электродвигателей 2 при перемещении рулевой плоскости 8, уменьшенные габаритные показатели за счет выполнения поворотного механизма в виде единой стойки поворотного элемента 10, а также максимального приближения поворотной оси 9 рулевой плоскости 8 к основанию 1, возможность вращательного движения без введения дополнительных звеньев и усложнения конструкции. Следствием этих технических преимуществ является с одной стороны увеличение КПД электропривода, с другой стороны расширение области применения за счет возможности вращательного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2614296C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721067C1 |
| Манипулятор | 1990 |
|
SU1745539A1 |

Изобретение относится к области машиностроения и может быть использовано в конструкциях механизмов для перемещения в пространстве исполнительного органа, например, рулевой плоскости. Механизм содержит основание, основную пару барабанов, каждый из которых установлен на валу соответствующего электродвигателя следящего привода, которые размещены на основании, причем барабаны связаны друг с другом посредством намотанной на них гибкой ленты, балансиры, установленные подвижно на стойке поворотного элемента, выполненного с возможностью жесткого закрепления на рулевой плоскости, контактные подшипники, закрепленные на балансирах с возможностью контактного взаимодействия с намотанной на упомянутые барабаны гибкой лентой. При этом механизм снабжен дополнительной парой барабанов, установленных на валах соответствующих электродвигателей и связанных друг с другом посредством намотанной на них дополнительной гибкой ленты, направление намотки которой противоположно относительно направления намотки гибкой ленты на основной паре барабанов. Использование изобретения позволяет уменьшить габариты механизма и расширить его технологические возможности. 4 ил.
Исполнительный механизм рулевой плоскости, содержащий основание, основную пару барабанов, каждый из которых установлен на валу соответствующего электродвигателя следящего привода, которые размещены на основании, причем барабаны связаны друг с другом посредством намотанной на них гибкой ленты, балансиры, установленные подвижно на стойке поворотного элемента, выполненного с возможностью жесткого закрепления на рулевой плоскости, контактные подшипники, закрепленные на балансирах с возможностью контактного взаимодействия с намотанной на упомянутые барабаны гибкой лентой, при этом следящий привод включает в себя имеющий приборный редуктор датчик положения рулевой плоскости и усилители мощности, соответствующим образом связанные между собой и с упомянутыми электродвигателями, отличающийся тем, что он снабжен дополнительной парой барабанов, связанных друг с другом посредством намотанной на них дополнительной гибкой ленты, направление намотки которой противоположно относительно направления намотки гибкой ленты на основной паре барабанов, при этом барабаны дополнительной пары установлены на валах соответствующих упомянутых электродвигателей.
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ПРИВОД | 0 |
|
SU284550A1 |
| US 4793576 A1, 27.12.1988 | |||
| US 5908177 A1, 01.06.1999 | |||
| CN 105711819 A, 29.06.2016. | |||
