ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к визуализации трехмерных моделей потоков или векторных полей. В частности, изобретение относится к визуализации моделей потоков или векторных полей, основываясь на временных последовательностях наборов данных изображений.
УРОВЕНЬ ТЕХНИКИ
Визуализация потока представляет собой тему, которая в последнее время привлекает значительное внимание. Разработаны многие способы визуализации данных о потоке, включающие в себя, например, прямую визуализацию линии течения (Alexander Köhn, Jan Klein, Florian Weiler, Heinz-Otto Peitgen, «A GPU-based Fiber Tracking Framework using Geometry Shaders», Proc. SPIE, Vol. 7261, 72611J, 2009), падение лучей на линии течения (Thomas Frühauf, «Raycasting vector fields», IEEE Visualization Proceedings, 1996), или слежение за частицами (Jens Krüger, Peter Kipfer, Polina Kondratieva, Rudiger Westermann, «A Particle System for Interactive Visualization of 3D Flows», IEEE Transactions On Visualization And Computer Graphics, Vol. 11, № 6, 11, 2005). Эти способы создают геометрические примитивы, такие как точки или траектории, векторные поля потока или траектории частиц, которые можно визуализировать с использованием стандартных способов компьютерной графики.
Основной недостаток современных решений состоит в том, что они не предоставляют способы интуитивной визуализации конкретных моделей потоков. Часто многие различные модели потоков смешаны на одном и том же изображении, приводя пользователя в замешательство, в частности, когда пользователь не знаком с математическим аппаратом, использованном при анализе потока.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Будет благоприятно иметь систему, способную интуитивно визуализировать модели потоков.
Таким образом, в одном из аспектов изобретение относится к системе для визуализации потока внутри объема трехмерного (3D) изображения, при этом система содержит:
первый блок переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на модели потока, присвоенной указанному местоположению;
второй блок переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенного указанному местоположению; и
блок смешивания для вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присвоенном каждому местоположению из второго множества местоположений, при этом 2D изображение представляет собой визуализацию модели потока и 3D изображение.
Модели потоков, присваиваемые каждому местоположению из первого множества местоположений можно получать, например, из входного файла. Альтернативно, их можно получать из данных изображения, в частности данных 4D изображения, посредством дифференциальной геометрии с использованием, например, оператора градиента или оператора структурного тензора. Блок смешивания можно адаптировать для вычисления свойства возможности воспроизведения в каждом местоположении из третьего множества местоположений внутри объема, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из первого и второго множества местоположений, и для вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, вычисляемом в каждом местоположении из третьего множества местоположений с использованием какого-либо подходящего способа воспроизведения объема, известного в данной области техники, например, способа прямого воспроизведения объема. Альтернативно, систему можно адаптировать для вычисления первого 2D изображения, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из первого множества местоположений, и второго 2D изображения, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из второго множества местоположений, и для чередующегося отображения первого и второго 2D изображений или для слияния первого и второго 2D изображений.
В одном из вариантов осуществления система дополнительно содержит блок моделей для вычисления модели потока в каждом местоположении из первого множества местоположений.
В одном из вариантов осуществления системы в каждом местоположении из первого множества местоположений модель потока вычисляют, основываясь на кривизне и/или закручивании кривой потока, связанной с потоком в указанном местоположении. Кривизна и закручивание уникально определяют геометрию кривой, поскольку они инвариантны в отношении репараметризации кривой.
В одном из вариантов осуществления системы модель потока допускает одну из конечного числа моделей, также обозначаемых как классы моделей. Использование классов моделей помогает пользователю концентрироваться на моделях потоков, представляющих интерес, определяемых, например, посредством диапазонов значений кривизны и закручивания.
В одном из вариантов осуществления системы свойство возможности воспроизведения, присваиваемое каждому местоположению из первого или второго множества местоположений содержит цвет и непрозрачность или прозрачность.
В одном из вариантов осуществления система дополнительно содержит пользовательский интерфейс, адаптированный для приема пользовательского ввода для определения первой и/или второй функции переноса. Таким образом, пользователь способен определять модели потоков и ткани, представляющие интерес и подлежащие визуализации на 2D изображении.
Специалисту в данной области техники будет понятно, что систему согласно изобретению можно использовать для визуализации поля векторов скоростей, связанного с потоком. Это является результатом того факта, что каждый поток, описываемый посредством кривых потока, определяет уникальное векторное поле и, наоборот, каждое векторное поле определяет уникальный поток, описываемый посредством кривых потока.
В дополнительном аспекте предусмотрена рабочая станция, содержащая систему согласно изобретению.
В дополнительном аспекте предусмотрено устройство получения изображений, содержащее систему согласно изобретению.
В дополнительном аспекте предоставлен способ визуализации потока внутри объема трехмерного (3D) изображения, при этом способ содержит:
первый этап переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на модели потока, присвоенной указанному местоположению;
второй этап переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенного указанному местоположению; и
этап смешивания для вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присваиваемом каждому местоположению из второго множества местоположений.
В одной из реализаций способ дополнительно содержит этап классификации модели для вычисления модели потока в каждом местоположении из первого множества местоположений.
В одной из реализаций способа в каждом местоположении из первого множества местоположений вычисляют модель потока, основываясь на кривизне и/или закручивании кривой потока, связанной с потоком в указанном местоположении.
В дополнительном аспекте изобретение относится к компьютерному программному продукту, подлежащему загрузке посредством компьютерного устройства, содержащего инструкций для визуализации потока внутри объема трехмерного (3D) изображения, причем компьютерное устройство содержит блок обработки и память, и компьютерный программный продукт после загрузки предоставляет указанному блок обработки возможность осуществления этапов способа согласно изобретению.
Специалисты в данной области примут во внимание, что два или более из указанных выше вариантов осуществления, реализаций и/или аспектов изобретения можно комбинировать каким-либо образом, который можно счесть полезным.
Модификации и вариации системы, рабочей станции, устройства получения изображений, способа и/или компьютерного программного продукта, которые соответствуют описанным модификациям и вариациям системы или способа, может осуществлять специалист в данной области, основываясь на описании.
Изобретение определено в независимых пунктах формулы изобретения. Преимущественные варианты осуществления определены в зависимых пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения очевидны из и разъяснены посредством реализаций и вариантов осуществления, описанных далее в настоящем документе и со ссылкой на сопроводительные чертежи, на которых:
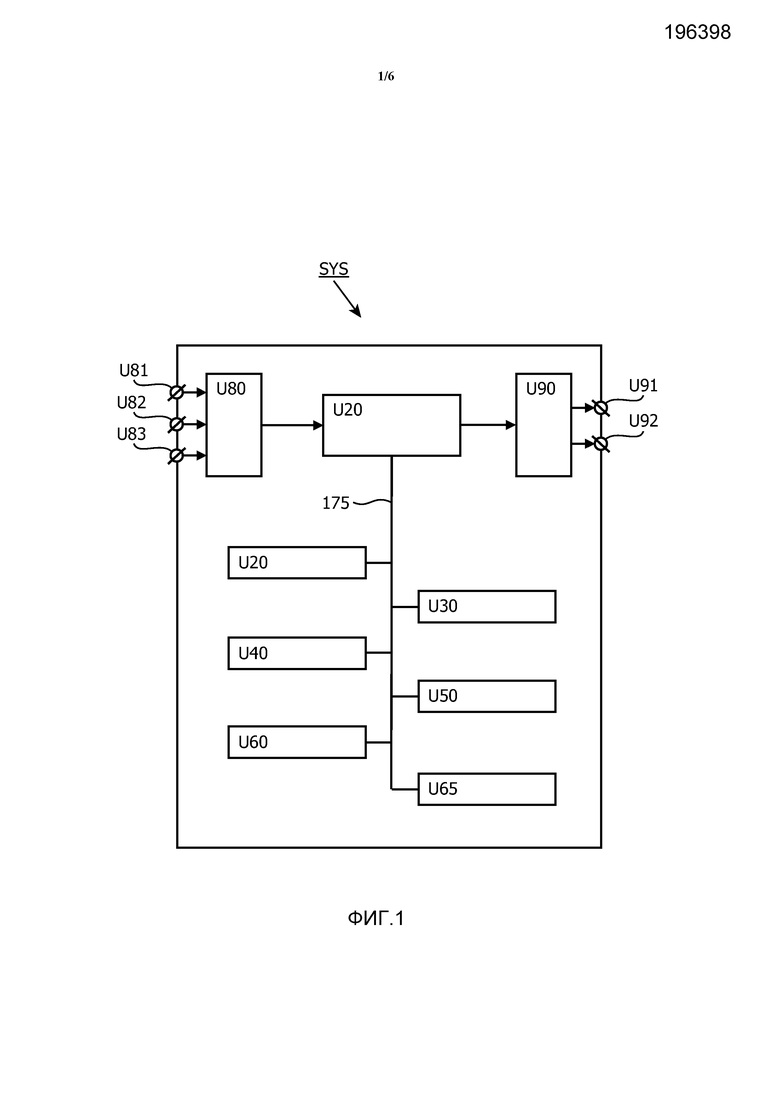
на Фиг. 1 представлена блочная диаграмма примерного варианта осуществления системы;
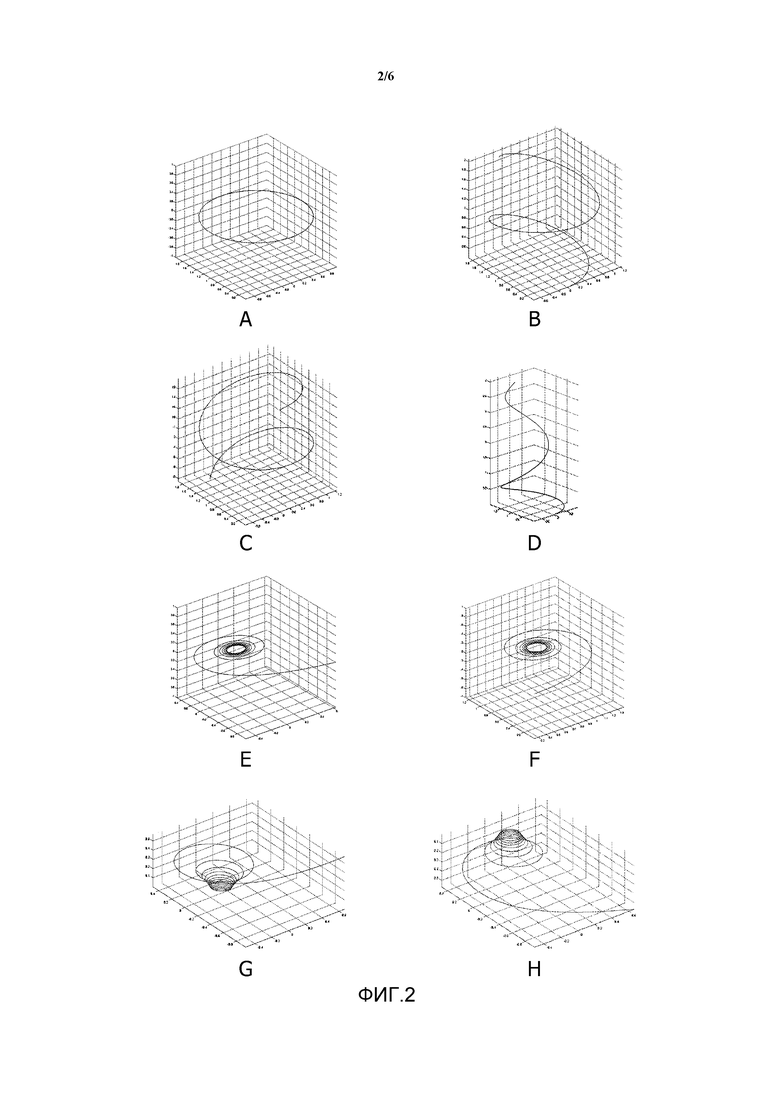
на Фиг. 2 представлены восемь примерных кривых потока, причем каждая кривая потока представляет отдельный класс моделей потока;
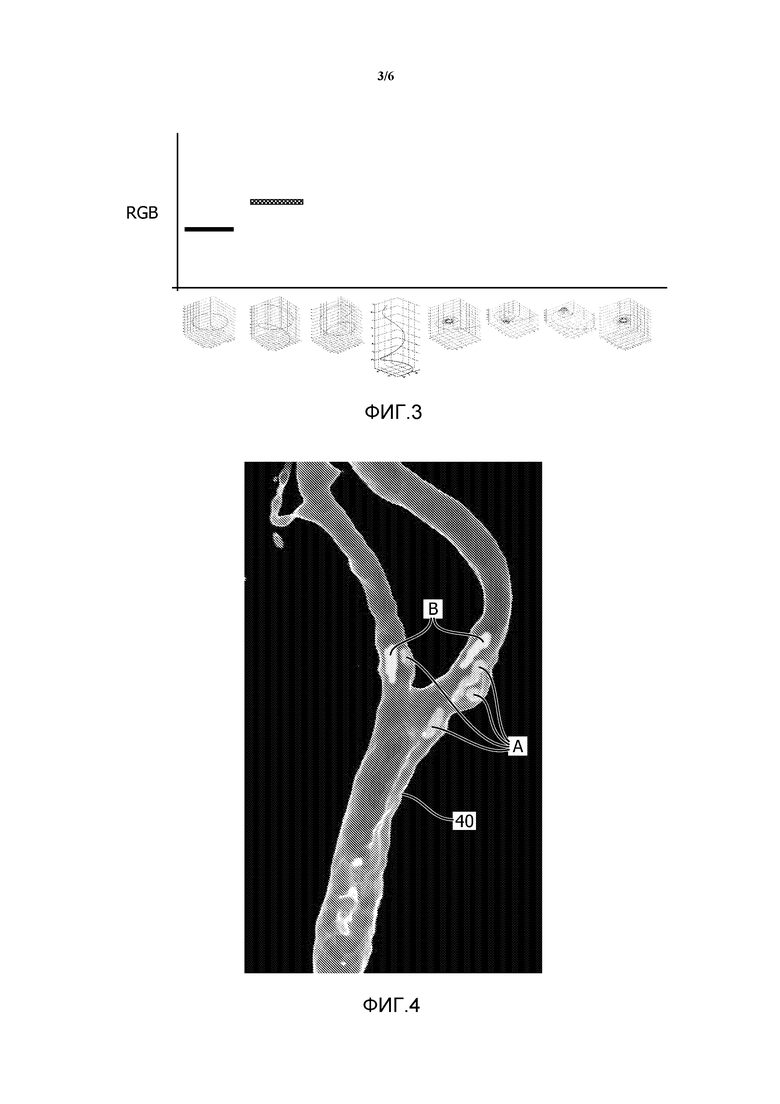
на Фиг. 3 проиллюстрирована примерная первая функция переноса, присваивающая цвета классам моделей потока;
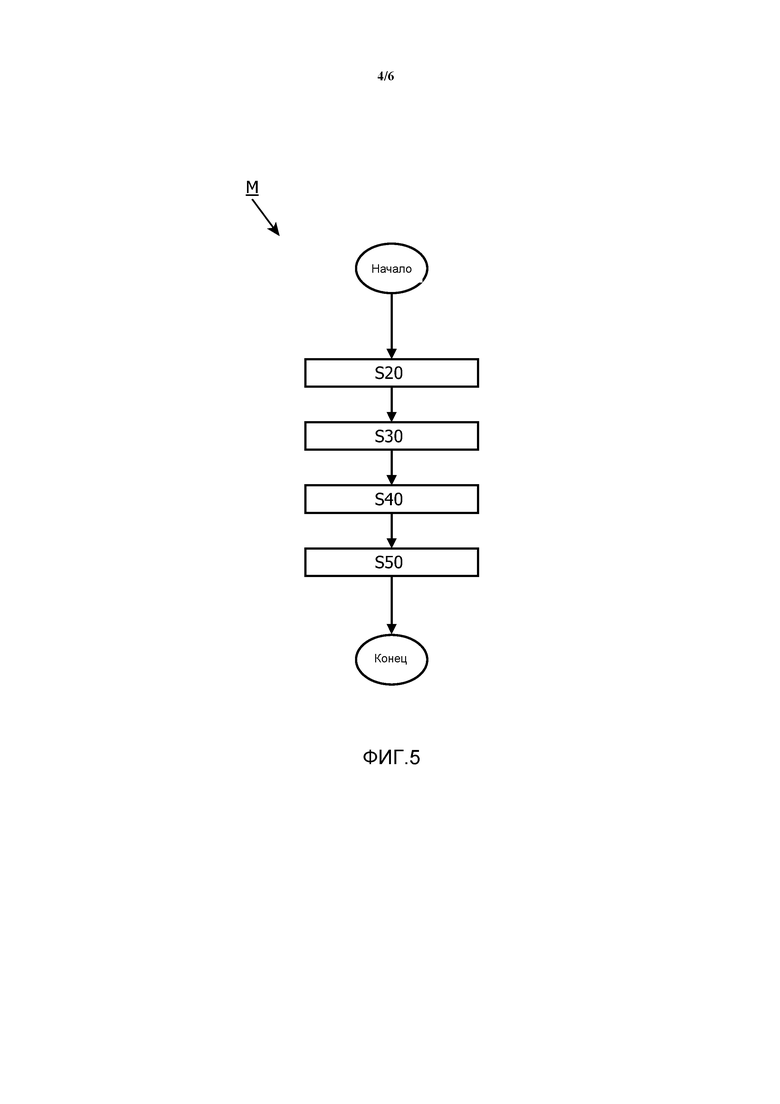
на Фиг. 4 представлено 2D изображение, вычисляемое посредством системы в соответствии с изобретением;
на Фиг. 5 схематически представлена примерная блок-схема способа;
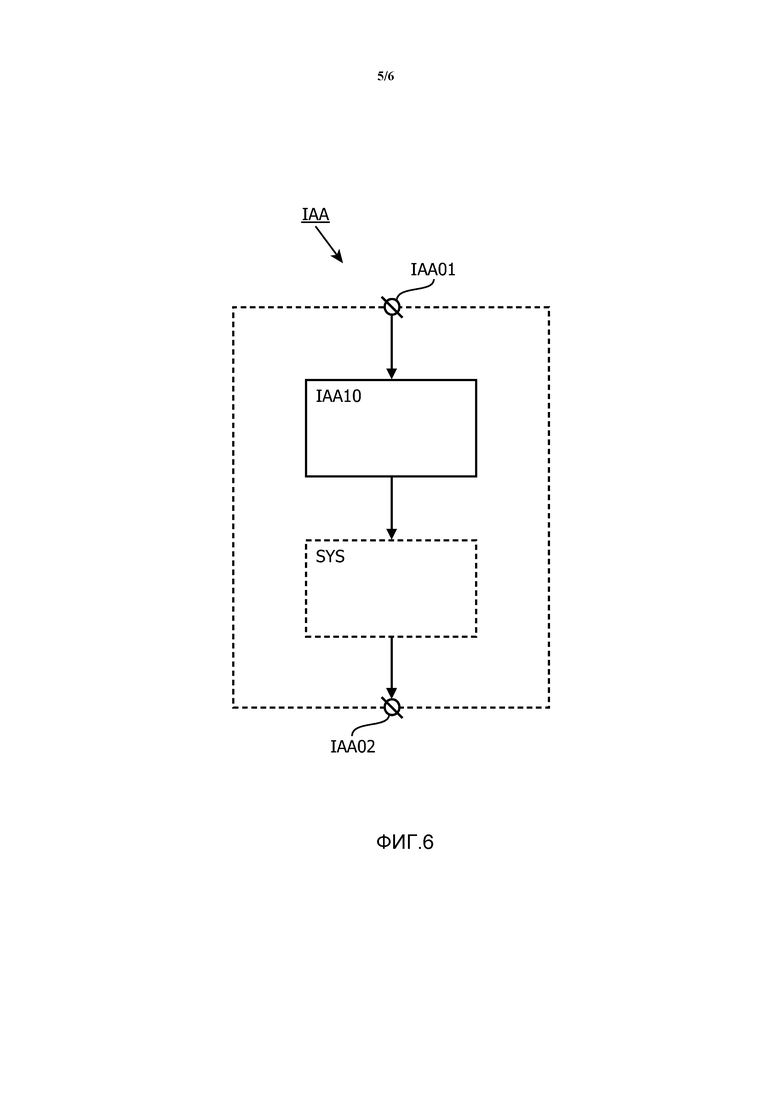
на Фиг. 6 схематически представлен примерный вариант осуществления устройства получения изображений; и
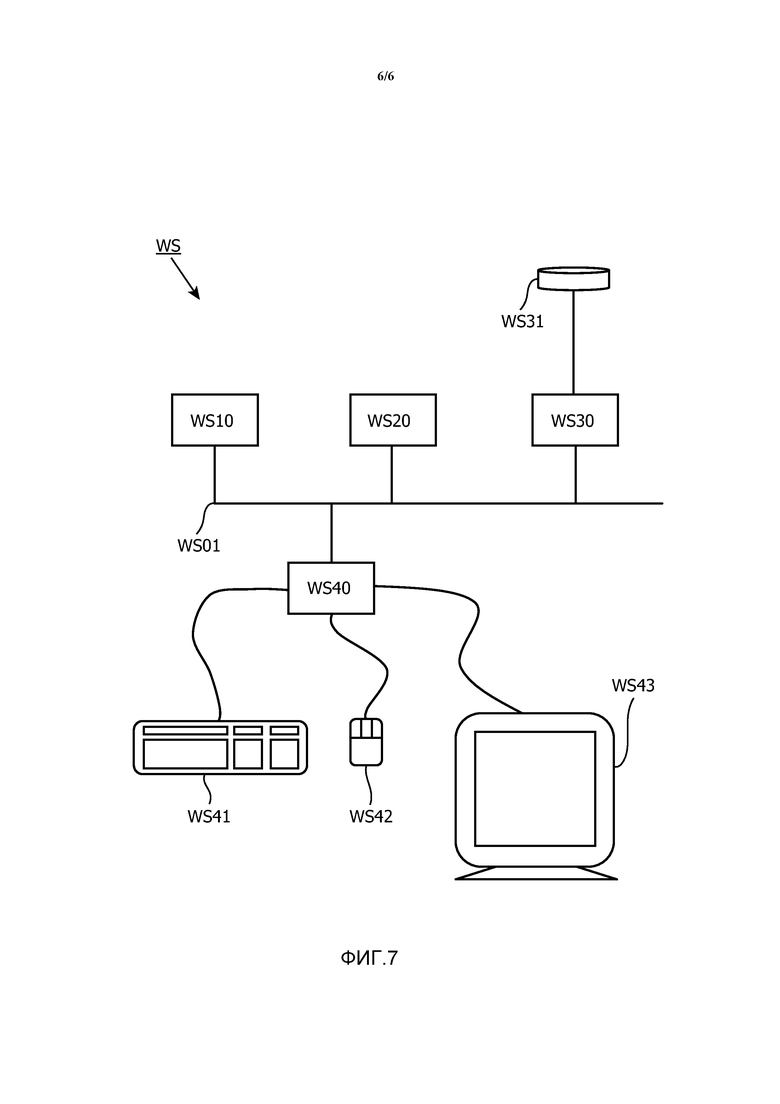
на Фиг. 7 схематически представлен примерный вариант осуществления рабочей станции.
Идентичные номера позиций используют для обозначения схожих частей на всех фигурах.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 схематически представлена блочная диаграмма примерного варианта осуществления системы SYS для визуализации потока внутри объема трехмерного (3D) изображения, при этом система содержит:
первый блок U30 переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на модели потока, присвоенной указанному местоположению;
второй блок U40 переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенного указанному местоположению; и
блок U50 смешивания для вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присваиваемом каждому местоположению из второго множества местоположений.
Примерный вариант осуществления системы SYS дополнительно содержит:
блок U20 моделей для вычисления модели потока в каждом местоположении из первого множества местоположений;
блок U60 управления для управления работой системы SYS; пользовательским интерфейсом U65 для связи между пользователем и системой SYS; и
блок U70 памяти для хранения данных.
В одном из вариантов осуществления системы SYS имеют место три входных разъема U81, U82 и U83 для входных данных. Первый входной разъем U81 адаптирован для того, чтобы принимать данные, вводимые из средства хранения данных, такого как, но без ограничения, жесткий диск, магнитная лента, флэш-память или оптический диск. Второй входной разъем U82 адаптирован для того, чтобы принимать данные, вводимые из пользовательского устройства ввода, такого как, но без ограничения, мышь или чувствительный к прикосновениям экран. Третий входной разъем U83 адаптирован для того, чтобы принимать данные, вводимые из пользовательского устройства ввода, такого как клавиатура. Входные разъемы U81, U82 и U83 соединены с блоком U80 управления вводом.
В одном из вариантов осуществления системы SYS имеют место два выходных разъема U91 и U92 для выходных данных. Первый выходной разъем U91 адаптирован для того, чтобы выводить данные на средство хранения данных, такое как жесткий диск, магнитная лента, флэш-память или оптический диск. Второй выходной разъем U92 адаптирован для того, чтобы выводить данные на устройство отображения. Выходные разъемы U91 и U92 принимают соответствующие данные через блок U90 управления выводом.
Специалист в данной области поймет, что существует множество путей для того, чтобы соединить устройства ввода с входными разъемами U81, U82 и U83 и устройства вывода с выходными разъемами U91 и U92 системы SYS. Эти пути содержат, но без ограничения, проводное и беспроводное соединение, цифровую сеть, такую как, но без ограничения, локальная сеть (LAN) и глобальная сеть (WAN), интернет, цифровая телефонная сеть и аналоговая телефонная сеть.
В одном из вариантов осуществления система SYS содержит блок U70 памяти. Система SYS адаптирована для того, чтобы принимать входные данные от внешних устройств через какой-либо из входных разъемов U81, U82 и U83 и хранить принятые входные данные в блоке U70 памяти. Загрузка входных данных в блок U70 памяти делает возможным быстрый доступ к имеющим отношение частям данных блоками системы SYS. Входные данные содержат 3D изображение. Необязательно, например, входные данные могут содержать пользовательский ввод для определения первой и/или второй функции переноса. Блок U70 памяти можно реализовать посредством устройств, таких как, но без ограничения, файл регистров CPU, кэш память, микросхема оперативного запоминающего устройства (RAM), микросхема постоянного запоминающего устройства (ROM) и/или привод жесткого диска и жесткий диск. Блок U70 памяти дополнительно может быть адаптирован для того, чтобы хранить выходные данные. Выходные данные содержат 2D изображение, на котором визуализированы модели потоков, представляющих интерес. Блок U70 памяти также может быть адаптирован для того, чтобы принимать данные от и/или доставлять данные на блоки системы SYS, содержащей блок U20 моделей, первый блок U30 переноса, второй блок U40 переноса, блок U50 смешивания, блок U60 управления и пользовательский интерфейс U65 через шину U75 памяти. Блок U70 памяти дополнительно адаптирован для того, чтобы делать выходные данные доступными для внешних устройств через какой-либо из выходных разъемов U91 и U92. Сохранение данных из блоков системы SYS в блоке U70 памяти предпочтительно может улучшать эффективность блоков системы SYS, а также скорость переноса выходных данных с блоков системы SYS на внешние устройства.
В одном из вариантов осуществления система SYS содержит блок U60 управления для управления системой SYS. Блок U60 управления может быть адаптирован для того, чтобы принимать управляющие данные от и предоставлять управляющие данные блока системы SYS. Например, после вычисления моделей потоков в первом множестве местоположений внутри объема, блок U20 моделей может быть адаптирован для того, чтобы предоставлять управляющие данные «модели потоков вычислены» на блок U60 управления, и блок U60 управления может быть адаптирован для того, чтобы предоставлять управляющие данные «использовать первую функцию переноса для того, чтобы вычислять свойство возможности воспроизведения в первом множестве местоположений внутри объема», на первый блок U30 переноса. Альтернативно, функции управления можно реализовать в других блоках системы SYS.
В одном из вариантов осуществления системы SYS, система SYS содержит пользовательский интерфейс U65, чтобы предоставлять возможность связи между пользователем и системой SYS. Пользовательский интерфейс U65 может быть адаптирован для того, чтобы принимать пользовательский ввод, содержащий название файла, содержащего 3D данные изображения, и название файла, содержащего модели потоков в каждом местоположении из первого множества местоположений внутри объема. Необязательно, пользовательский интерфейс может принимать пользовательский ввод для выбора режима работы системы, такого как, например, для выбора или модификации первой и/или второй функции переноса. Пользовательский интерфейс дополнительно может быть адаптирован для того, чтобы отображать 2D изображение. Специалист в данной области поймет, что больше функций могут быть полезно реализованы в пользовательском интерфейсе U65 системы SYS.
Система SYS может быть адаптирована для приема первого и/или второго множества местоположений внутри объема. Альтернативно, система SYS может быть адаптирована для того, чтобы определять первое и/или второе множество местоположений. Первое и/или второе множество местоположений внутри объема может быть по существу идентичным множеству вокселей, по существу содержащихся в объеме. Альтернативно, первое и/или второе множество местоположений внутри объема может содержать поднабор вокселей, по существу содержащихся в объеме. Система SYS дополнительно может быть адаптирована для вычисления свойства возможности воспроизведения в каждом вокселе внутри объема, т. е. в каждом местоположении из примерного третьего множества местоположений, основываясь на значении свойства возможности воспроизведения в каждом местоположении из первого и/или второго множества местоположений с использованием, например, интерполяционных или регрессионных способов.
Специалисту в данной области техники известны многие способы определения множества местоположений внутри объема и вычисления неопределенностей. Объем формулы изобретения не следует толковать как ограниченный использованием какого-либо конкретного способа.
В одном из вариантов осуществления система SYS содержит блок U20 моделей для вычисления модели потока в каждом местоположении из первого множества местоположений, это первое множество местоположений содержит местоположения всех вокселей, например, центров вокселей, внутри объема 3D изображения. Поток описан векторным полем, которое уникально определено потоком. Векторное поле определяет вектор поля потока для каждого вокселя внутри объема. В медицине векторы поля потока крови можно вычислять по потоку крови, измеряемому с использованием ультразвуковой доплеровской векторной томографии, MR томографии или PET. Альтернативно, поток крови в сердце или дереве кровеносных сосудов можно моделировать с использованием моделей потока крови (см. например Three-dimensional finite element modeling of blood flow in the coronary arteries, PhD Thesis by Kim, Hyun Jin, STANFORD UNIVERSITY, 2009). Когда получают векторное поле потока, для каждого вокселя вычисляют кривизну и закручивание кривой потока, пересекающей центр вокселя. Вычисленные значения кривизны и закручивания используют для того, чтобы определять классы моделей потока.
Альтернативно, система SYS может быть адаптирована для того, чтобы принимать ввод, содержащий дескриптор модели потока (например, кривизну и закручивание) в каждом местоположении из первого множества местоположений.
В одном из вариантов осуществления классы моделей потока определяют, основываясь на значениях кривизны и закручивания. Можно использовать следующие девять классов моделей потока:
A: постоянная кривизна, нулевое закручивание (кривые потока представляют собой круги);
B: постоянная положительная кривизна, постоянное ненулевое закручивание (кривые потока представляют собой спирали постоянного радиуса);
C: постоянная отрицательная кривизна, постоянное ненулевое закручивание (кривые потока представляют собой спирали постоянного радиуса, инвертированные по отношению к спиралям в B);
D: постоянная кривизна, переменное закручивание (спиральный поток «ускоряется» по оси z);
E: возрастающая кривизна, нулевое закручивание (поток в одной плоскости, но сходится в направлении определенной точки);
F: убывающая кривизна, нулевое закручивание (поток в одной плоскости, но расходящийся из определенной точки);
G: возрастающая кривизна, ненулевое закручивание (кривые потока представляют собой спирали переменного радиуса);
H: убывающая кривизна, ненулевое закручивание (кривые потока представляют собой спирали переменного радиуса); и
I: какие-либо другие кривизна и закручивание.
Каждому классу присвоены свойства возможности воспроизведения посредством первой функции переноса, также обозначаемой как функция переноса модели потока. На Фиг. 3 проиллюстрирована такая примерная функция переноса модели потока. Используя RGB цветовое кодирование с 256 значениями цвета, функция присваивает зеленый цвет (0, 255, 0), классу A, синий цвет (0, 255, 255) классу B и (0, 0, 0) любому другому классу. Кроме того, функция присваивает непрозрачность 100% двум классам A и B, и непрозрачность 0% любому другому классу. Таким образом, функция переноса модели потока будет показывать визуализированные модели потоков класса A и B и не будет показывать модели потоков какого-либо другого класса. Посредством повторного определения функций переноса можно отображать другие классы моделей потока.
Альтернативно, функция переноса модели потока может непрерывно отображать значения кривизны k  [k1, k2] в значения зеленого цвета (0, C(k), 0) и значение непрозрачности 100% и/или значения закручивания t [t1, t2] в значения синего цвета (0, 0, T(k)) и значение непрозрачности 100%, где k1=k2, k1<k2, и t1, t2, t1<t2, обозначают концы интервалов значений кривизны и закручивания для визуализации, и 100% обозначает непрозрачность. Если k
[k1, k2] в значения зеленого цвета (0, C(k), 0) и значение непрозрачности 100% и/или значения закручивания t [t1, t2] в значения синего цвета (0, 0, T(k)) и значение непрозрачности 100%, где k1=k2, k1<k2, и t1, t2, t1<t2, обозначают концы интервалов значений кривизны и закручивания для визуализации, и 100% обозначает непрозрачность. Если k  [k1, k2] или t [t1, t2], значения цвета (0, 0, 0) и значение непрозрачности 0 присваивают посредством функции переноса модели потока такой паре (k, t). Альтернативно, непрозрачность модели потока может линейно зависеть от величины вектора градиента изображения в первом множестве местоположений. Векторы градиента изображения вычисляют, основываясь на скалярном поле, определяемом посредством интенсивностей изображения внутри объема 3D изображения. В этом случае модели потоков будут видны только на краях структур внутри 3D объема, например, на краях кровеносных сосудов, а не за пределами или внутри структур, поскольку за пределами или внутри структур градиент близок к нулю и, таким образом, непрозрачность соответствующего модели потока также близка к нулю. Специалист в данной области техники знает другие пути определения функции переноса модели потока, которые можно использовать для системы SYS по изобретению.
[k1, k2] или t [t1, t2], значения цвета (0, 0, 0) и значение непрозрачности 0 присваивают посредством функции переноса модели потока такой паре (k, t). Альтернативно, непрозрачность модели потока может линейно зависеть от величины вектора градиента изображения в первом множестве местоположений. Векторы градиента изображения вычисляют, основываясь на скалярном поле, определяемом посредством интенсивностей изображения внутри объема 3D изображения. В этом случае модели потоков будут видны только на краях структур внутри 3D объема, например, на краях кровеносных сосудов, а не за пределами или внутри структур, поскольку за пределами или внутри структур градиент близок к нулю и, таким образом, непрозрачность соответствующего модели потока также близка к нулю. Специалист в данной области техники знает другие пути определения функции переноса модели потока, которые можно использовать для системы SYS по изобретению.
Второй блок U40 переноса адаптирован для вычисления свойства возможности воспроизведения в каждом местоположении из второго множества местоположений внутри объема 3D изображения. Свойство возможности воспроизведения вычисляют посредством второй функции переноса, также обозначаемой как функция переноса изображения, основываясь на значении 3D изображения, присвоенном указанному местоположению. Если набор вокселей и второе множество местоположений различны, значения свойства возможности воспроизведения, вычисляемые в каждом местоположении из второго множества местоположений, используют для получения свойства возможности воспроизведения в каждом вокселе 3D изображения с использованием, например, интерполяционных или регрессионных способов. Специалист в данной области техники знает, как сконструировать и/или где найти другие функции переноса, подходящих для вычисления свойства возможности воспроизведения в каждом местоположении из второго множества местоположений внутри объема 3D изображения. Такие примерные функции переноса можно найти, например, в Multidimensional Transfer Functions for Interactive Volume Rendering by Joe Kniss et al, IEEE Transactions on Visualization and Computer Graphics, Vol. 8, No. 3, July-September 2002, страницы 270-285.
Прямое воспроизведение объема (DVR) с использованием свойств возможности воспроизведения, вычисляемых посредством модели потока и функций переноса изображения, применят для того, чтобы вычислять конечное 2D изображение для отображения на устройстве отображения. Специалист в данной области техники будет знать, как реализовать DVR. Краткое изложение DVR можно найти, например, в презентации в PowerPoint, которая доступна по адресу http://www.cse.ohio-state.edu/~hwshen/788/volume.ppt.
В одном из вариантов осуществления блок U50 смешивания системы SYS можно адаптировать для вычисления первого 2D изображения, основываясь на свойстве возможности воспроизведения, возникающем из модели потока в каждом вокселе, и второго 2D изображения, основываясь на свойстве возможности воспроизведения, возникающем из значения изображения в каждом вокселе. Можно выполнять слияние первого и второго 2D изображений друг с другом с использованием, например, стыковки 2D изображения. Альтернативно, первое и второе 2D изображения можно попеременно отображать в течение предварительно определяемого периода времени, например, периода между 0,1 и 1,0 секунды. Этот вариант осуществления, в частности, можно использовать для иллюстрирования неопределенностей временных последовательностей изображений.
В одном из вариантов осуществления свойство возможности воспроизведения, вычисляемое с использованием функции переноса модели потока, и свойство возможности воспроизведения, вычисляемое с использованием функции переноса изображения, смешивают в каждом вокселе. Затем используют DVR для того, чтобы вычислять 2D изображение, основываясь на получаемых смешанных свойствах возможности воспроизведения.
В одном из вариантов осуществления осуществляют слияние 3D массива, содержащего координаты вокселей и соответствующее свойство возможности воспроизведения, вычисленное с использованием функции переноса модели потока, и 3D массива, содержащего координаты вокселей и соответствующее свойство возможности воспроизведения, вычисленное с использованием функции переноса изображения, посредством прибавления соответствующих значений свойства возможности воспроизведения. Затем DVR используют для того, чтобы вычислять 2D изображение, основываясь на получаемых свойствах возможности воспроизведения. На Фиг. 4 представлено 2D изображение, вычисленное посредством системы SYS, с использованием этого способа. Классы моделей потока, представленные на Фиг. 2, и функцию переноса модели потока, проиллюстрированную на Фиг. 3 и описанную выше, используют для того, чтобы вычислять 2D изображение. Воспроизведение оранжевой поверхности осуществляли с использованием стандартного воспроизведения объема, примененного к набору анатомических данных MRI каротидной бифуркации 40. Это изображение добавляет важный анатомический контекст к визуализации модели потока. Воспроизведение модели потока согласно одному из вариантов осуществления системы SYS дает набор облачных изображений, изображенных синим (класс A) и зеленым (класс B).
Специалист в данной области примет во внимание, что система по изобретению может представлять собой полезный инструмент для помощи врачу во многих аспектах его/его работы. Кроме того, несмотря на то, что варианты осуществления системы проиллюстрированы с использованием медицинского применения системы, немедицинские применения системы также предусмотрены.
Кроме того, специалисты в данной области поймут, что другие варианты осуществления системы SYS также возможны. Возможно, в частности, повторно определять блоки системы и повторно распределять их функции. Несмотря на то, что описанные варианты осуществления применены к медицинским изображениям, другие применения системы, не связанные с медицинскими применениями, также возможны.
Блоки системы SYS можно реализовать с использованием процессора. Обычно, их функции осуществляют под управлением программного продукта. Во время исполнения, программный продукт обычно загружают в память, например, в RAM, и исполняют из нее. Программу можно загружать из фоновой памяти, такой как ROM, жесткий диск или магнитный и/или оптический накопитель или можно загружать через сеть, такую как интернет. Необязательно, специализированная интегральная схема может обеспечивать описанную функциональность.
На Фиг. 5 представлена примерная блок-схема способа M визуализации потока внутри объема трехмерного (3D) изображения. Способ M начинается этапом S20 модели для вычисления модели потока в каждом местоположении из первого множества местоположений. После этапа S20 модели, способ M продолжается первым этапом S30 переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на модели потока, присвоенной указанному местоположению, и вторым этапом S40 переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенном указанному местоположению. Первый и второй этапы переноса можно осуществлять независимо друг от друга, параллельно или в каком-либо другом порядке. После двух этапов S30 и S40 переноса, способ M продолжается этапом S50 смешивания для вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, присваиваемом каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присваиваемом каждому местоположению из второго множества местоположений. После вычисления 2D изображения, способ заканчивается.
Специалист в данной области может менять порядок некоторых этапов, добавлять некоторые необязательные этапы (например, этап интерактивного определения первой и/или второй функции переноса) или осуществлять некоторые этапы параллельно с использованием моделей потоковой обработки данных, многопроцессорных систем или множества процессов, не отступая от идеи, предполагаемой настоящим изобретением. Необязательно, две или более этапов способа M можно комбинировать в один этап. Необязательно, этап способа M можно разделять на множество этапов.
На Фиг. 6 схематически представлен примерный вариант осуществления устройства IAA получения изображений, в котором используют систему SYS согласно изобретению, причем указанное устройство IAA получения изображений содержит блок IAA10 получения изображений, соединенный через внутреннее соединение с системой SYS, входной разъем IAA01 и выходной разъем IAA02. Такая компоновка предпочтительно увеличивает возможности устройства IAA получения изображений, обеспечивая указанное устройство IAA получения изображений благоприятными возможностями системы SYS.
На Фиг. 7 схематически представлен примерный вариант осуществления рабочей станции WS. Рабочая станция содержит системную шину WS01. Процессор WS10, память WS20, адаптер WS30 ввода/вывода диска (I/O) и пользовательский интерфейс WS40 функционально соединены с системной шиной WS01. Устройство WS31 дискового накопителя функционально связано с адаптером WS30 I/O диска. Клавиатура WS41, мышь WS42 и устройство WS43 отображения функционально связаны с пользовательским интерфейсом WS40. Систему SYS по изобретению, реализованную в компьютерной программе, хранят в устройстве WS31 дискового накопителя. Рабочая станция WS00 адаптирован для того, чтобы загружать программу и входные данные в память WS20 и исполнять программу в процессоре WS10. Пользователь может вводить информацию в рабочую станцию WS00 с использованием клавиатуры WS41 и/или мыши WS42. Рабочая станция адаптирована для того, чтобы выводить информацию на устройство WS43 отображения и/или на диск WS31. Специалист в данной области поймет, что существует множество других вариантов осуществления рабочей станции WS, известные в данной области, и что настоящий вариант осуществления служит цели иллюстрирования изобретения и не должен быть интерпретирован в качестве ограничивающего изобретение этим конкретным вариантом осуществления.
Следует отметить, что указанные выше варианты осуществления иллюстрируют, а не ограничивают изобретение, и что специалисты в данной области будут способны разработать альтернативные варианты осуществления, не отступая от сущности приложенной формулы изобретения. В формуле изобретения какие-либо ссылочные позиции, расположенные в круглых скобках, не следует толковать в качестве ограничения формулы изобретения. Слово «содержит» не исключает присутствие элементов или этапов, не перечисленных в формуле изобретения или в описании. Элемент в единственном числе не исключает присутствия множества таких элементов. Изобретение можно реализовать посредством аппаратного обеспечения, содержащего несколько отдельных элементов, и посредством запрограммированного компьютера. В пунктах формулы о системе, где перечислены несколько блоков, несколько из этих блоков могут быть осуществлены посредством одной и той же записи с аппаратным обеспечением или программным обеспечением. Использование слов первый, второй, третий и т.д. не указывает на какой-либо порядок. Эти слова следует интерпретировать как названия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство создания многомерных виртуальных изображений органов дыхания человека и способ создания объёмных изображений с применением устройства | 2021 |
|
RU2783364C1 |
| ИДЕНТИФИКАЦИЯ ОТДЕЛЬНЫХ ПОДОБЛАСТЕЙ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ ДЛЯ ОЦЕНИВАНИЯ КАЛЬЦИЯ | 2011 |
|
RU2587909C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| Способ трехмерной реконструкции резьбы отверстий под шпильки главного разъёма корпуса реактора и автоматической идентификации дефектов | 2022 |
|
RU2791416C1 |
| УПРАВЛЕНИЕ ДВИЖЕНИЕМ В ЛИНЕЙНОМ УСКОРИТЕЛЕ (LINAC), УПРАВЛЯЕМОМ С ПОМОЩЬЮ MRI | 2015 |
|
RU2675678C1 |
| Способ и электронное устройство для обнаружения трехмерных объектов с помощью нейронных сетей | 2021 |
|
RU2776814C1 |
| ОЦЕНКА ПОТОКА, СОПРОТИВЛЕНИЯ ИЛИ ДАВЛЕНИЯ НА ОСНОВАНИИ ИЗМЕРЕНИЙ ДАВЛЕНИЯ ИЛИ ПОТОКА И АНГИОГРАФИИ | 2016 |
|
RU2717885C1 |
| СИСТЕМЫ И СПОСОБЫ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СВЁРТОЧНОЙ НЕЙРОННОЙ СЕТИ | 2017 |
|
RU2720070C1 |
| СПОСОБ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ НЕЙРОННОЙ СЕТИ | 2017 |
|
RU2720440C1 |
Группа изобретений относится к визуализации трехмерных моделей потоков. Группа изобретений состоит из системы, применения системы, рабочей станции, устройства, способа и средства хранения данных для осуществления визуализации потока внутри объема трехмерного (3D) изображения. Система содержит первый блок переноса для применения первой функции переноса, второй блок переноса для применения второй функции переноса и блок смешивания для вычисления 2D изображения. Осуществляют первый этап переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на классе модели потока. Причем класс модели потока присваивают из множества классов моделей потоков для классификации потока в упомянутом местоположении. Осуществляют второй этап переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения. Осуществляют этап смешивания для вычисления двухмерного (2D) изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присвоенном каждому местоположению из второго множества местоположений. При этом множество классов моделей потоков определяют посредством диапазонов значений кривизны и закручивания. Группа изобретений позволяет осуществить визуализацию модели потока внутри объема трехмерного изображения за счет определения множества классов моделей потоков посредством диапазонов значений кривизны и закручивания. 6 н. и 6 з.п. ф-лы, 7 ил.
1. Система (SYS) для визуализации потока внутри объема трехмерного (3D) изображения, при этом система содержит:
первый блок (U30) переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на классе модели потока, присвоенном упомянутому местоположению, причем класс модели потока присвоен из множества классов моделей потоков для классификации потока в упомянутом местоположении;
второй блок (U40) переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенном упомянутому местоположению; и
блок (U50) смешивания для вычисления двухмерного (2D) изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присвоенном каждому местоположению из второго множества местоположений;
при этом множество классов моделей потоков определены посредством диапазонов значений кривизны и закручивания.
2. Система (SYS) по п. 1, в которой блок (U50) смешивания выполнен с возможностью вычисления первого 2D изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого множества местоположений, и второго 2D изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из второго множества местоположений, и с возможностью чередующегося отображения первого и второго 2D изображений или слияния первого и второго 2D изображений.
3. Система (SYS) по п. 1, в которой блок (U50) смешивания выполнен с возможностью вычисления свойства возможности воспроизведения в каждом местоположении из третьего множества местоположений внутри объема, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого и второго множеств местоположений, и с возможностью вычисления 2D изображения, основываясь на свойстве возможности воспроизведения, вычисленном в каждом местоположении из третьего множества местоположений.
4. Система (SYS) по п. 1, дополнительно содержащая блок (U20) классификации моделей для вычисления класса модели потока в каждом местоположении из первого множества местоположений.
5. Система (SYS) по п. 1, в которой свойство возможности воспроизведения, присвоенное каждому местоположению из первого или второго местоположений, содержит цвет и непрозрачность или прозрачность.
6. Система (SYS) по п. 1, дополнительно содержащая пользовательский интерфейс (U65), выполненный с возможностью приема пользовательского ввода для определения первой и/или второй функций переноса.
7. Применение системы (SYS) по любому одному из предшествующих пунктов для визуализации поля векторов скоростей, связанного с потоком.
8. Рабочая станция (WS), содержащая систему (SYS) по любому одному из предшествующих пунктов.
9. Устройство (IAA) получения изображений, содержащее систему (SYS) по любому одному из предшествующих пунктов.
10. Способ (M) визуализации потока внутри объема трехмерного (3D) изображения, при этом способ содержит:
первый этап (S30) переноса для применения первой функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из первого множества местоположений внутри объема, основываясь на классе модели потока, присвоенном упомянутому местоположению, причем класс модели потока присваивают из множества классов моделей потоков для классификации потока в упомянутом местоположении;
второй этап (S40) переноса для применения второй функции переноса, которая присваивает свойство возможности воспроизведения каждому местоположению из второго множества местоположений внутри объема, основываясь на значении 3D изображения, присвоенном упомянутому местоположению; и
этап (S50) смешивания для вычисления двухмерного (2D) изображения, основываясь на свойстве возможности воспроизведения, присвоенном каждому местоположению из первого множества местоположений, и на свойстве возможности воспроизведения, присвоенном каждому местоположению из второго множества местоположений;
при этом множество классов моделей потоков определяют посредством диапазонов значений кривизны и закручивания.
11. Способ (M) по п. 10, дополнительно содержащий этап вычисления класса модели потока в каждом местоположении из первого множества местоположений посредством блока классификации моделей.
12. Средство хранения данных, в котором хранятся инструкции для визуализации потока внутри объема трехмерного (3D) изображения, причем инструкции при исполнении блоком обработки побуждают блок обработки осуществлять этапы способа по п. 10 или 11.
| ROY VAN PELT ET AL | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ ТЕКСТУРЫ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2295772C1 |
| US 2003152262 А1, 14.08.2003 | |||
| EINAR HEIBERG | |||
| Three-Dimensional Flow Characterization Using Vector Pattern Matching, IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, том 9, 3, 2003, 313-319 | |||
| JISHANG WEI ET AL | |||
| "A Sketch-Based Interface for Classifying and Visualizing Vector Fields", Visualization Symposium (PacificVis), 2010 IEEE PACIFIC, март 2010, 129-136. | |||

