Системы управления биоэлектрическими протезами, содержащие блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователи силы сжатия и положения пальцев и вибраторы, известны.
Предлагаемая схема отличается от известных тем, что в ней установлен блок временного ограничения, благодаря которому обеспечлВается возможиость подачИ информации о величине усилия, положении и перемещении пальцев не постоянно, а в течение небольших временных интервалов. Тем самым снижается утомляемость и адаптация оператора к вибрационной информации о силе сжатия и положении пальцев искусственной кисти.
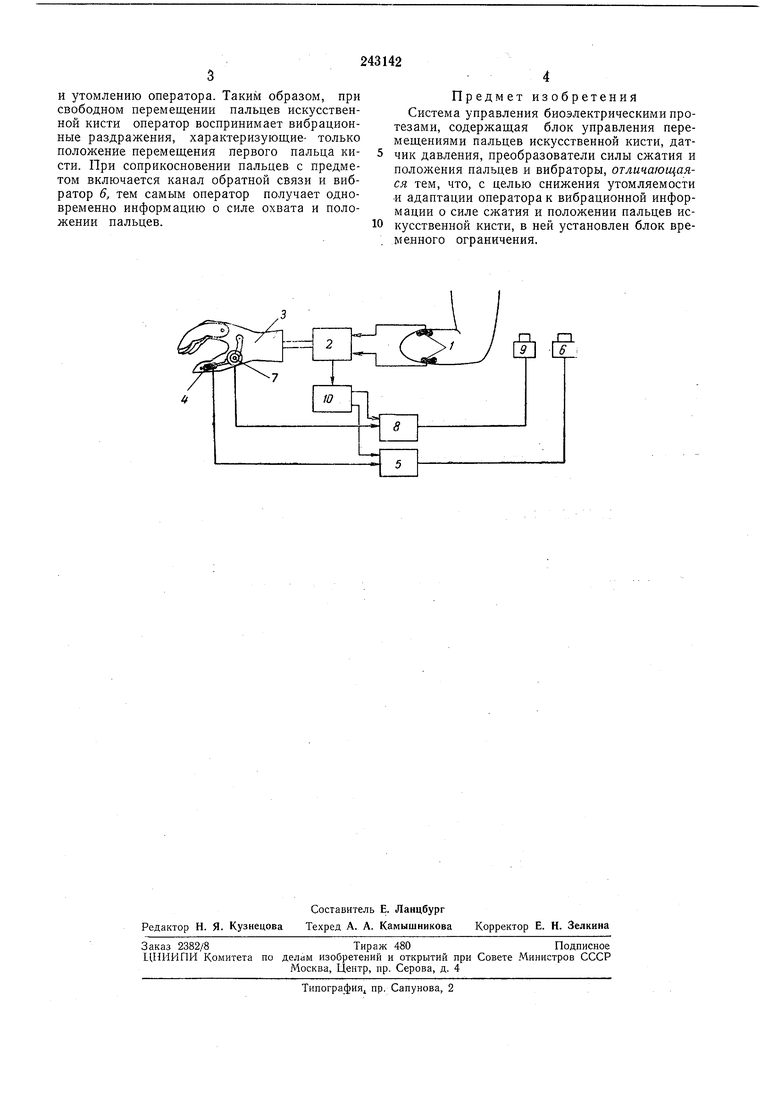
На чертеже изображена блок-схема описываемой системы. Системна содержит токосъем ники /, с помощью которых снимаются биоэлектрические сигналы, возникающие в скелетных мышцах. Эти сигналы поступают в электронный блок 2 управления перемещениями пальцев искусственной кисти 3. Сигналы этого блока управляют электродвигателем искусственной кисти. Указанные элементы системы образуют прямой канал управления.
датчик 4 давления, преобразователь 5 силы сжатия и вибратор 6. Информация о величине силы сжатия перекодируется в преобразователе в частотно-импульсные сигналы (вибрационные импульсы).
Второй канал обратной связи характеризует положение и перемещение пальцев искусственной кисти. Он состоит из датчика 7 угловых перемещений (например, потенциометра), укрепленного на оси шарнира первого пальца, преобразователя 8 положения пальцев и вибратора 9.
К обоим каналам обратной связи подключен блок 10 временного ограничения, который
предназначен для подачи сигналов обратной связи только в течение 2-3 сек от начала перемещения или сжатия пальцев кисти. После указанного интервала времени блок 10 временного ограничения отключается. Следовательно, информация о величине усилия, положении или перемещении пальцев кисти поступает к оператору не постоянно, а дискретно, в течение небольщих временных интервалов, когда в системе появляются управляющие
сигналы, идущие из блока 2 управления и воздействующие на перемещение пальцев искусственной кисти.
и утомлению оператора. Таким образом, при свободном перемещении пальцев искусственной кисти оператор воспринимает вибрационные раздражения, характеризующие- только положение перемещения первого пальца кисти. При соприкосновении пальцев с предметом включается канал обратной связи и вибратор 6, тем самым оператор получает одновременно информацию о силе охвата и положении пальцев.
Предмет изобретения Система управления биоэлектрическими протезами, содержащая блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователи силы сжатия и положения пальцев и вибраторы, отличающаяся тем, что, с целью снижения утомляемости и адаптации оператора к вибрационной информации о силе сжатия и положении пальцев искусственной кисти, в ней установлен блок временного ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМ | 2016 |
|
RU2653820C2 |
| УСТРОЙСТВО ПОЗИЦИОННОГО ОЧУВСТВЛЕНИЯ ПОДВИЖНОСТИ ПАЛЬЦЕВ ИСКУССТВЕННОЙ КИСТИ | 2019 |
|
RU2712306C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| СИСТЕМА УПРАВЛЕИИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧИОСТЕЙ | 1970 |
|
SU278023A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМK';U:i-'--^ •'>&'•""• -'-"i [' -^-^irSI::»^^ | 1972 |
|
SU354857A1 |
| Устройство для управления биоэлектрическими протезами верхних конечностей | 1980 |
|
SU936908A1 |
