Изобретение относится:
- к устройствам и способам наблюдения за подводной средой, рельефом дна и объектами, расположенными на морском дне, с борта подводного аппарата с помощью его бортовых гидроакустических средств;
- к области навигации, системам и способам определения местоположения подводного аппарата по донному рельефу и объектам, расположенным на морском дне.
Создание роботизированных средств [1], в том числе автономных необитаемых подводных аппаратов (АНПА), является одним из приоритетных направлений развития техники. Для выполнения задач, связанных со следованием по заданному маршруту и выходу в заданный район в водах открытого моря, АНПА должны оснащаться корреляционно-экстремальными навигационными системами (КЭНС), входящими в состав бортовых навигационных систем (БНС) [14].
Виды КЭНС [17]:
- гравитационная;
- магнитометрическая;
- по рельефу местности;
- по изображению местности [17].
Гравитационная и магнитометрическая КЭНС обеспечиваются бортовыми, высокого уровня точности, измерительными средствами гравитационного и магнитного полей Земли. В настоящее время размещение таких средств на роботах, в том числе на АНПА, недоступно по их массогабаритным характеристикам и из-за необходимости обслуживания операторами. Поэтому КЭНС подводных роботов, в частности, АНПА, могут обеспечиваться ориентированием по известному рельефу, изображению дна моря и объектов, расположенных на морском дне [17, 20].
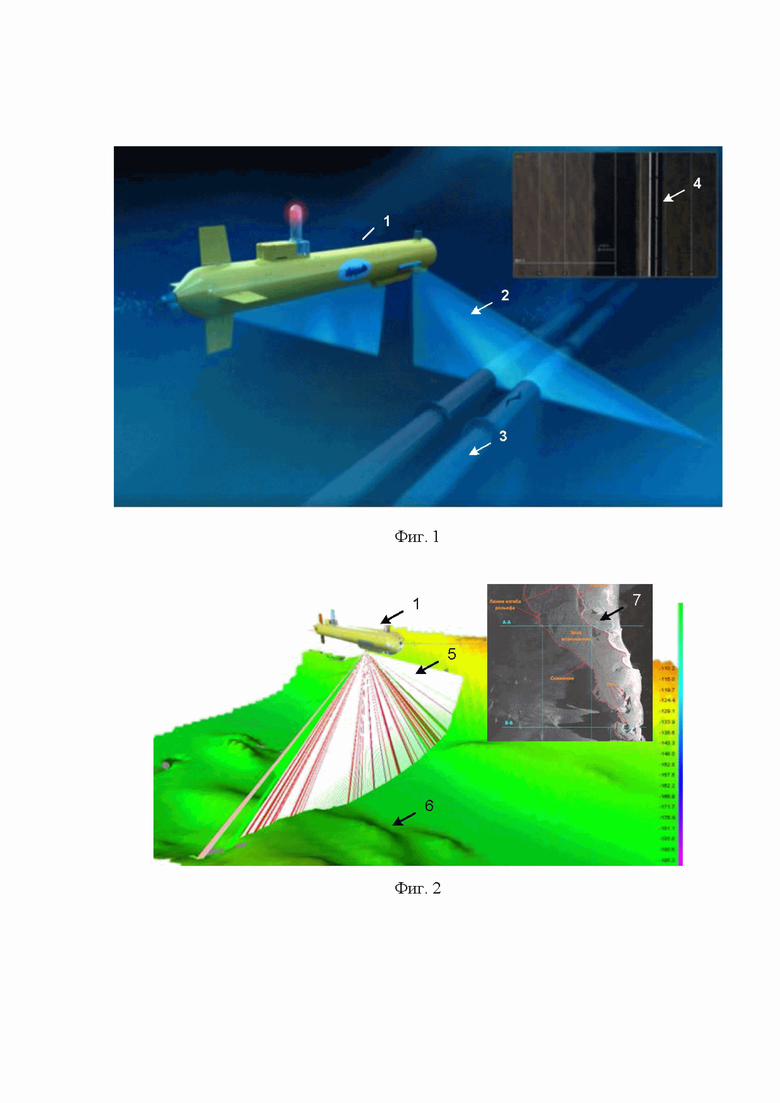
Измерительными средствами, обеспечивающими такую КЭНС на АНПА, являются бортовые гидролокаторы бокового обзора (ГБО) и многолучевые эхолоты (МЛЭ), которыми оснащаются АНПА [11, 19].
Применение бортовой аппаратуры АНПА иллюстрируется фиг. 1 и 2.
На фиг. 1 показаны:
1 - АНПА;
2 - гидроакустический луч ГБО;
3 - один из возможных донных объектов;
4 - наблюдаемый образ донного объекта на экране ГБО.
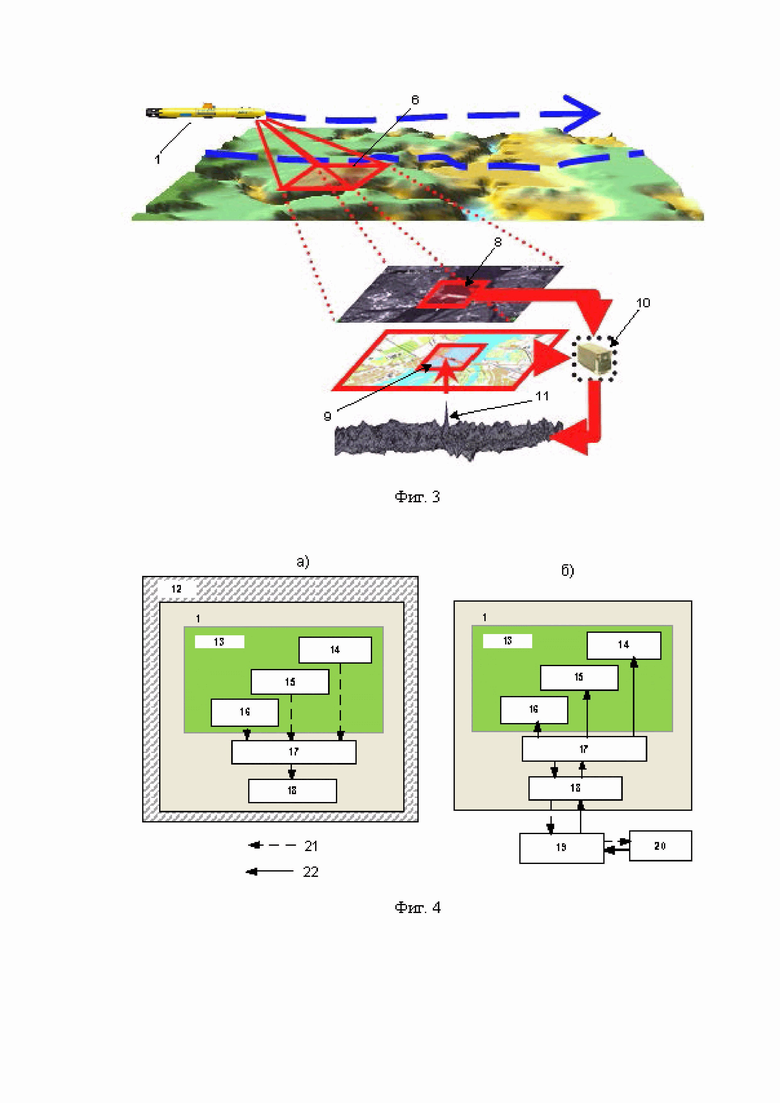
На фиг. 2 показаны:
1 - АНПА;
5 - гидроакустический луч МЛЭ;
6 - донный рельеф;
7 - наблюдаемый образ донного рельефа.
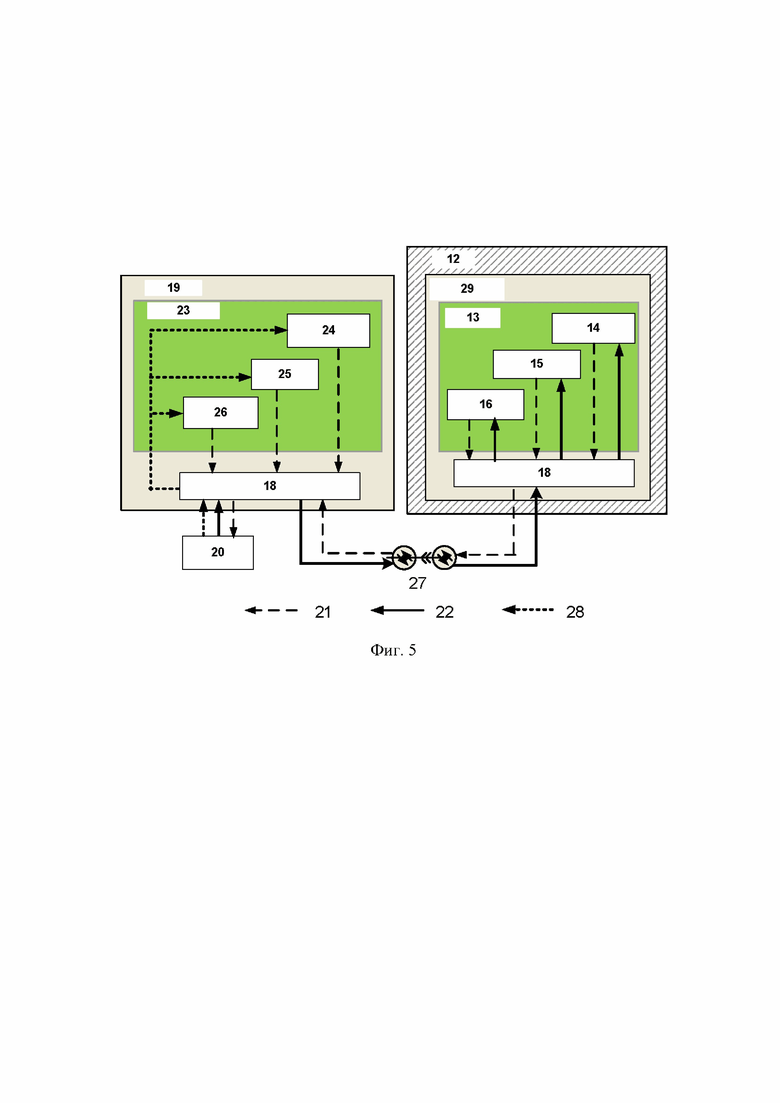
На фиг. 3 показаны:
8 - информационные кадры;
9 - эталонные информационные кадры;
10 - расчет корреляционной зависимости между измеренными информационными и эталонными информационными кадрами;
11 - экстремум функционала этой зависимости.
На фиг. 4 показаны:
12 - опытно-испытательный полигон (ОИП);
13 - бортовая навигационная система (БНС);
14 - корреляционно-экстремальная навигационная система (КЭНС);
15 - гидролокатор бокового обзора (ГБО);
16 - многолучевой эхолот (МЛЭ);
17 - запоминающее устройство (ЗУ);
18 - коммутатор;
19 - имитационно-моделирующий комплекс (ИМК);
20 - операторы;
21 - информационные связи, результаты решения задач съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и навигационного ориентирования;
22 - информационные связи, внесение корректирующих изменений в аппаратное обеспечение и алгоритмы функционирования ГБО, МЛЭ, КЭНС.
На фиг. 5 введены следующие обозначения:
23 - стенд БНС;
24 - ЦД КЭНС;
25 - ЦД ГБО;
26 - ЦД МЛЭ;
27 - волоконно-оптическая линия связи (ВОЛС) с оптическим разъемным соединителем;
28 - информационные связи, обеспечивающие настройка аппаратного обеспечения автоматического измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне, и алгоритмов автоматического выполнения КЭНС 14 по данным ГБО 15, МЛЭ 16 функций навигационного ориентирования по заданному маршруту;
29 - АНПА в режиме ТИПА.
КЭНС 14 по донному рельефу 6, изображению дна моря и объектов, расположенных на донном рельефе 6 (фиг.3) [9, с. 140; 10; 11; 15], основана на съемке ГБО 15 и МЛЭ 16 информационных кадров 8, их сопоставлении с эталонными информационными кадрами 9, полученными ранее и хранящимися в памяти БНС 13, расчете 10 корреляционной зависимости между информационными и эталонными информационными кадрами и отыскании экстремума 11 функционала этой зависимости, который соответствует искомому навигационному решению, то есть определению истинного текущего местоположения АНПА 1. [4].
Задача технического проектирования и создания бортовой навигационной системы АНПА 1, обеспечивающей навигационное ориентирование с применением КЭНС 14 и бортовых гидроакустических средств, решается на двух этапах [13, 14]:
- на первом этапе создаются проекты собственно БНС 13, ГБО 15, МЛЭ 16 и КЭНС 14 как технических устройств и программных средств;
- на втором этапе отрабатываются алгоритмы автоматического измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне, автоматического выполнения функций КЭНС 14 с заданным уровнем качества.
Второй этап проектирования осуществляется путем многократного выполнения по заданной программе натурных наладочно-регулировочных пусков АНПА 1 в опытно-испытательном полигоне [1; 7; 9, с. 51] с известными глубиной моря, рельефом, изображением дна моря дна и объектами, расположенными на морском дне.
Процесс наладочно-регулировочных пусков НРП включает в себя два основных этапа, последовательность которых представлена
На первом этапе (фиг. 4а) проводятся пуски АНПА 1 в опытно-испытательном полигоне 12 по маршрутам, назначенным маршрутным заданием (МЗ) [18], с решением задач ГБО 15, МЛЭ 16 съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и навигационного ориентирования КЭНС 14, регистрацией результатов в запоминающем устройстве (ЗУ) 17, возвращением АНПА 1 к ИМК 19.
На втором этапе (фиг. 4б), после возвращения АНПА 1 к ИМК 19, результаты передаются из ЗУ 17 через коммутатор 18 по каналам информационных связей 21 в ИМК 19, с использованием которого операторы (инженеры-проектировщики) 20 осуществляют их анализ и настройку аппаратного обеспечения автоматического измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне, и алгоритмов автоматического выполнения КЭНС 14 по данным ГБО 15, МЛЭ 16 функций навигационного ориентирования по заданному маршруту, с последующим внесением по каналам информационных связей 22 корректирующих изменений в аппаратное обеспечение и алгоритмы функционирования ГБО 15, МЛЭ 16, КЭНС 14 в составе БНС 13 АНПА.
Наладочно-регулировочные пуски осуществляются до достижения требуемых характеристик работы ГБО 15, МЛЭ 16, КЭНС 14.
Существенной особенностью процесса наладочно-регулировочных пусков является то, что анализ и настройка операторами (инженерами-проектировщиками) 20 алгоритмов, а также внесение корректирующих изменений в аппаратное обеспечение и алгоритмы функционирования ГБО 15, МЛЭ 16, КЭНС 14 осуществляются после завершения каждого пуска и возвращения АНПА 1 к ИМК 19.
Такая организация последовательного осуществления этапов наладочно-регулировочных пусков АНПА 1 в ОИП 12 обладает недостатком, состоящим в больших объемах испытаний и, соответственно, в больших затратах времени на настройку аппаратного обеспечения и алгоритмов функционирования бортовой аппаратуры АНПА 1 в составе БНС 13.
Эта проблема известна и обсуждается, например, в [16, с. 124], с указанием возможности ее разрешения путем создания цифровых двойников (ЦД) разрабатываемого физического объекта: «Важным преимуществом ЦД является то, что он позволяет одновременно эффективно разрабатывать аппаратное и программное обеспечение».
В качестве аналогов заявляемого изобретения принимаются:
1) Лаборатория для проведения испытаний и доработки разработанных цифровых двойников (моделей) по свидетельству на программу для ЭВМ RU 2020616248 [2, с. 57.]: «В программе предоставляется возможность проверить 3D-модель на прочность, скорость, вес, аэродинамику. Для моделей, включающих в себя электронику, проводится проверка правильности закрепления элементной базы цифрового двойника модели технического творчества».
2) Способ разработки и симуляции системы автоматизации посредством цифровых двойников по патенту RU 2789787 С1 [12]: «Для каждого реального компонента создают цифровой двойник или виртуальный компонент, который загружается на сервер, чтобы вместо реальных компонентов симулировать выполнение функции последних. Пользователь может, таким образом, во время разработки заменять различные реальные компоненты виртуальными компонентами и функции системы автоматизации контролировать или симулировать».
Согласно аналогам, идея преодоления указанного выше недостатка состоит в создании и применении в составе ИМК 19 стенда БНС 23 [5, пп. 16, 17] с системой цифровых двойников [5, п. 3.24]: ЦД КЭНС 24, ЦД ГБО 25 и ЦД МЛЭ 26 как компьютерных моделей [6, пп. 3.1.7, 3.12] бортовой аппаратуры реального АНПА 1 в составе БНС 13 [7, п. 3.25] (фиг. 5).
Само по себе копирование цифровыми двойниками ГБО 15, МЛЭ 16 и КЭНС 14 означает их полную идентичность и соответствие требованиям, предъявляемым к цифровым двойникам по их адекватности реальным объектам [7, п. 3.1].
В концепции цифрового двойника виртуальные компьютерные модели не отбрасываются после создания материальных объектов, а используются в связке с ними на протяжении всего их жизненного цикла на этапах тестирования, доработки, эксплуатации и утилизации [7, п. 3.24; 16, с. 14], что реализуется в объекте изобретения.
Задачей изобретения является разработка:
Способа настройки бортовой навигационной системы (БНС) 13 автономного необитаемого подводного аппарата (АНПА) 1 для формирования цифровой модели устройств в составе БНС АНПА, включающей бортовой гидролокатор бокового обзора (ГБО) 15, многолучевой эхолот (МЛЭ) 16 и корреляционно-экстремальную навигационную систему (КЭНС) 14, обеспечивающих ориентирование АНПА 1 по известному рельефу опытно-испытательного полигона (ОИП) 12, представленному в банке данных КЭНС 14 в виде цифровой модели подстилающего донного рельефа 6, имитированного изображения дна моря и объектов, расположенных на морском дне, ранее настроенной по реальным данным съемок в ОИП 12, заключающийся в том, что процесс наладочно-регулировочных пусков осуществляют в два основных этапа:
на первом этапе проводятся пуски АНПА 1 в опытно-испытательном полигоне (ОИП) 12 по маршрутам, назначенным маршрутным заданием, с решением с помощью ГБО 15, МЛЭ 16 задач съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и с помощью КЭНС 14 задачи навигационного ориентирования, регистрацией результатов в запоминающем устройстве (ЗУ) 17, возвращением АНПА 1 к имитационно-моделирующему комплексу (ИМК) 19;
на втором этапе после возвращения АНПА 1 к ИМК 19 результаты передаются из ЗУ 17 через коммутатор 18 в ИМК 19, с использованием которого операторы (инженеры-проектировщики) 20 осуществляют их анализ и настройку:
аппаратного обеспечения автоматического измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне,
алгоритмов автоматического выполнения КЭНС 14 по данным ГБО 15, МЛЭ 16 функций навигационного ориентирования по заданному маршруту,
с последующим внесением изменений в аппаратное обеспечение и алгоритмы функционирования ГБО 15, МЛЭ 16, КЭНС 14 в составе БНС 13 АНПА 1,
в котором анализ результатов решения с помощью ГБО 15, МЛЭ 16 задач съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и с помощью КЭНС 14 задачи навигационного ориентирования, осуществляется путем их сравнения с результатами одновременного управляемого операторами (инженерами-проектировщиками) 20 решения этих задач цифровыми двойниками бортовых гидролокатора бокового обзора (ЦД ГБО) 25, многолучевого эхолота (ЦД МЛЭ) 26 и корреляционно-экстремальной навигационной системы (ЦД КЭНС) 24, создаваемыми на стенде БНС 23 в составе ИМК 19 как копий систем автоматического управления бортовой аппаратуры АНПА 1, что обеспечивает их полную идентичность с ГБО 15, МЛЭ 16, КЭНС 14 в составе БНС 13 АНПА 1 и соответствие требованиям, предъявляемым к цифровым двойникам по их адекватности реальным объектам.
При наладочно-регулировочном пуске реальный АНПА 1 в режиме ТИПА после старта следует в опытно-испытательном полигоне маршрутом, назначенным маршрутным заданием, постоянно формируемым операторами в режиме текущего времени и передаваемым от ИМК 19 через коммутаторы 18 и ВОЛС 27 на АНПАи1 в режиме ТИПА, с выполнением МЛЭ 16, ГБО 15 функций измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне, заданных маршрутным заданием, в целях навигационного ориентирования с применением КЭНС 14 по заданному маршруту. При этом, в рамках одного и того же наладочно-регулировочного пуска, в текущем маршрутном задании могут задаваться многократные прохождения АНПА 1 в режиме ТИПА по одному и тому же или по различным маршрутам, или по отдельным участкам этих маршрутов, с многократными измерениями глубины, съемкой и интерпретацией рельефа дна и объектов, расположенных на морском дне, решением КЭНС 14 задачи навигационного ориентирования по этим данным, с передачей результатов через коммутаторы и ВОЛС 27 в ИМК 19 в целях настройки операторами ИМК 19 операторами (инженерами-проектировщиками)20 алгоритмов систем автоматического управления по данным сравнительной оценки целевого качества результатов выполнения функций ГБО 15, МЛЭ 16, КЭНС 14 и их цифровыми двойниками ЦД ГБО 25, ЦД МЛЭ 26, ЦД КЭНС 24 и передачи результатов настройки через ВОЛС 27 и коммутаторы 18 для корректуры алгоритмов ГБО 15, МЛЭ 16, КЭНС 14 непосредственно в процессе испытательного пуска [5].
Этот способ позволяет, при однократном наладочно-регулировочном пуске, организовать многократное выполнение одного или различных сценариев функционирования АНПА 1 в режиме ТИПА по маршрутам, глубинам, профилю дна и объектам, расположенным на морском дне, в целях обеспечения многократной реализации различных условий навигационного ориентирования в процессе однократного наладочно-регулировочного пуска [5], что существенно снижает объем наладочно-регулировочных пусков в целом.
Таким образом, технический результат изобретения, подтверждающий его патентоспособность и новизну, заключается в сокращении продолжительности этапа жизненного цикла АНПА 1, связанного с наладочно-регулировочными пусками АНПА 1 для достижения заданного качества выполнения функций бортовой гидроакустической аппаратурой АНПА 1 по измерению глубины, съемке и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне, в целях навигационного ориентирования с применением КЭНС 14, с одновременным уменьшением ошибок навигационного ориентирования.
Изобретательский уровень подтверждается тем, что изобретение не следует явным образом из уровня техники, а промышленная применимость -использованием в изобретении только компьютерных моделей, копирующих существующие системы автоматического управления бортовой аппаратуры АНПА 1, а также использованием АНПА 1 в широко применяемом режиме телеуправляемого необитаемого подводного аппарата со стандартным обменом информацией через коммутаторы с помощью волоконно-оптической линии связи.
Источники информации, использованные при выявлении изобретения:
1. Автономные подводные роботы. Системы и технологии. / Под общ. ред. акад. М.Д. Агеева. - М.: Наука, 2005. - 398 с.
2. Алейник Я.А. Свидетельство на программу для ЭВМ RU 2020616248. Дата публикации 15.06.2020 // Дайджест научно-технических публикаций по направлению «Цифровизация ТЭК». Пилотный выпуск 01.07.2020 - 30.09.2020.
3. Баклицкий В.К. Корреляционно-экстремальные методы навигации и наведения. - Тверь: ТО «Книжный клуб», 2009. - 360 с.
4. Бортовой комплекс высокоточной навигации с корреляционно-экстремальной навигационной системой и цифровой картой рельефа местности / А.И. Наумов, Е.К. Кичигин, И.А. Сафонов, Мох Ахмед Медани Ахмед Эламин // Вестник Воронежского государственного технического университета. - №6-1, том 9.
5. ГОСТ 16504-81. Система государственных испытаний продукции. Испытания и контроль качества продукции. - Дата введения 01.01.1982.
6. ГОСТ Р 57412-2017. Компьютерные модели в процессах разработки, производства и эксплуатации изделий. - Дата введения -10.03.2017.
7. ГОСТ Р 57700.37-2021. Компьютерные модели и моделирование. Цифровые двойники изделий. - Дата введения 01.01.2022.
8. Дмитриев А.Л. Оптические системы передачи информации: Учебное пособие. - СПб: СПбГУИТМО, 2007. - 96 с.
9. Испытания АНПА, разработанного НПО «Аврора». - URT: https://www.avrorasystems, com/ru/public/pressroom/news/109800/ - Дата обращения 09.07.2023.
10. Исследование и разработка необитаемых подводных робототехнических систем и комплексов: Подводная робототехника // ИМПТ ДВО РАН. - 1ЖГ: http://www.imtp.febras.ru/podvodnaya-robototexnika.html?showall=1. - Дата обращения 09.07.2023.
11. Лекомцев В. Гидроакустические средства визуализации для необитаемых подводных аппаратов // Журнал СТА «Современные технологии автоматизации». - №3, 2013. - С.78.
12. Лутц, Бенджамин. Патент RU 2789787 С1 / Патентообладатель Siemens Aktiengesellschaft (DE). - Дата публикации 08.10.2020.
13. Перспективы повышения эффективности автономных подводных роботов / Ю.В. Матвиенко, А.В. Инзарцев, Л.В. Киселев, А.Ф. Щербатюк // Известия ЮФУ. Технические науки. Раздел П. - Морская робототехника. №1 (174). 2016.
14. Подводные робототехнические комплексы: системы, технологии, применение / А.В. Инзарцев, Л.В. Киселев, В.В. Костенко, Ю.В. Матвиенко, A.M. Павин, А.Ф. Щербатюк //ФГБУН Ин-т проблем морских технологий ДВО РАН. - Владивосток, 2018. - 368 с.
15. Проблемные вопросы интеллектуализации процессов управления автономными необитаемыми подводными аппаратами / А.И. Машошин, И.В. Пашкевич // Мехатроника, автоматизация, управление. - Том 21, №11, 2020. - 623 с.
16. Прохоров А., Лысачев М. Цифровой двойник. Анализ, тренды, мировой опыт.- М.: ООО «АльянсПринт», 2020. - 401 с.
17. Разработки в сфере применения корреляционно-экстремальных навигационных систем (КЭНС) // Мобильные информационные системы. - URL: https://www.npomis.ru/kens_systems. -Дата обращения 09.07.2023.
18. Система управления АНПА большой автономности на базе мультиагентного подхода / А.А. Борейко, А.В. Инзарцев, А.И. Машошин, A.M. Павин, И.В. Пашкевич // Подводные исследования и робототехника. - 2019. №2 (28). - С.23-31.
19. Современные средства подводного звуковидения / В. Лекомцев, Д. Титаренко // Современные технологии автоматизации. -2011, №3. - С.36-46.
20. Топографо-геодезическое и картографическое обеспечение Российской Федерации. Состояние и перспективы развития отрасли геодезии и картографии / И.В. Васильев, А.В. Коробов, Г.Г. Побединский, А.Б. Приданкин. - Геодезия и картография, №12, 2014. - С.2-11.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
Использование: изобретение относится к области навигации, системам и способам определения местоположения подводного аппарата по донному рельефу. Способ настройки бортовой навигационной системы (БНС) автономного необитаемого подводного аппарата (АНПА) для формирования цифровой модели устройств в составе БНС АНПА, включающей бортовой гидролокатор бокового обзора (ГБО), многолучевой эхолот (МЛЭ) и корреляционно-экстремальную навигационную систему (КЭНС), обеспечивающих ориентирование АНПА по донному рельефу, заключающийся в том, что в процессе наладочно-регулировочных пусков (НРП) осуществляют пуски АНПА в опытно-испытательном полигоне (ОИП), решение задач ориентирования АНПА по донному рельефу с помощью БНС, их регистрацию и возвращение АНПА к имитационно-моделирующему комплексу (ИМК) для анализа результатов и настройки БНС, отличающийся тем, что результаты решения задач с помощью БНС передаются в процессе наладочно-регулировочного пуска от АНПА к ИМК с помощью волоконно-оптической линии связи (ВОЛС), обеспечивающей функционирование АНПА в режиме телеуправляемого необитаемого подводного аппарата (ТНПА); анализ результатов решения задач с помощью БНС осуществляется путем их сравнения с результатами одновременного управляемого операторами (инженерами-проектировщиками) решения этих задач цифровыми двойниками ГБО (ЦД ГБО), МЛЭ (ЦД МЛЭ) и КЭНС (ЦД КЭНС), создаваемыми в составе ИМК, что обеспечивает сокращение продолжительности этапа жизненного цикла АНПА, связанного с НЛП для достижения заданного качества выполнения функций АНПА по назначению. 1 з.п. ф-лы, 5 ил.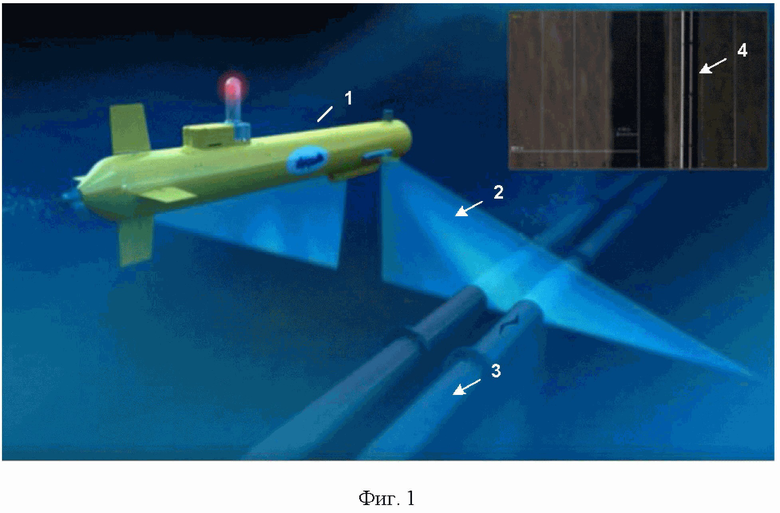
1. Способ настройки бортовой навигационной системы (БНС) автономного необитаемого подводного аппарата (АНПА) для формирования цифровой модели устройств в составе БНС АНПА, включающей бортовой гидролокатор бокового обзора (ГБО), многолучевой эхолот (МЛЭ) и корреляционно-экстремальную навигационную систему (КЭНС), обеспечивающих ориентирование АНПА по известному рельефу опытно-испытательного полигона (ОИП), представленному в банке данных КЭНС в виде цифровой модели подстилающего донного рельефа, имитированного изображения дна моря и объектов, расположенных на морском дне, ранее настроенной по реальным данным съемок в ОИП, заключающийся в том, что процесс наладочно-регулировочных пусков НРП осуществляют в два основных этапа:
на первом этапе проводятся пуски АНПА в опытно-испытательном полигоне (ОИП) по маршрутам, назначенным маршрутным заданием, с решением с помощью ГБО, МЛЭ задач съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и с помощью КЭНС задачи навигационного ориентирования, регистрацией результатов в запоминающем устройстве (ЗУ), возвращением АНПА к имитационно-моделирующему комплексу (ИМК);
на втором этапе после возвращения АНПА к ИМК результаты передаются из ЗУ через коммутатор в ИМК, с использованием которого операторы (инженеры-проектировщики) осуществляют их анализ и настройку:
аппаратного обеспечения автоматического измерения глубины, съемки и интерпретации рельефа, изображения дна моря и объектов, расположенных на морском дне,
алгоритмов автоматического выполнения КЭНС по данным ГБО, МЛЭ функций навигационного ориентирования по заданному маршруту,
с последующим внесением изменений в аппаратное обеспечение и алгоритмы функционирования ГБО, МЛЭ, КЭНС в составе БНС АНПА, отличающийся тем, что анализ результатов решения с помощью ГБО, МЛЭ задач съемки и интерпретации рельефа, изображения дна моря, объектов, расположенных на морском дне, и с помощью КЭНС задачи навигационного ориентирования, осуществляется путем их сравнения с результатами одновременного управляемого операторами (инженерами-проектировщиками) решения этих задач цифровыми двойниками бортовых гидролокаторов бокового обзора (ЦД ГБО), многолучевого эхолота (ЦД МЛЭ) и корреляционно-экстремальной навигационной системы (ЦД КЭНС), создаваемых на стенде БНС в составе ИМК как копий систем автоматического управления бортовой аппаратуры АНПА, что обеспечивает их полную идентичность с ГБО, МЛЭ, КЭНС в составе БНС АНПА и соответствие требованиям, предъявляемым к цифровым двойникам по их адекватности реальным объектам.
2. Способ по п. 1, отличающийся тем, что при наладочно-регулировочном пуске в процессе технологической отладки БНС осуществляются функционирование реального АНПА в режиме телеуправляемого необитаемого подводного аппарата (ТИПА) и информационный обмен между реальной БНС АНПА и имитируемой БНС ИМК с помощью волоконно-оптической линии связи (ВОЛС) и через коммутаторы, которыми оснащаются АНПА и ИМК.
| СПОСОБ РАЗРАБОТКИ И СИМУЛЯЦИИ СИСТЕМЫ АВТОМАТИЗАЦИИ ПОСРЕДСТВОМ ЦИФРОВЫХ ДВОЙНИКОВ | 2020 |
|
RU2789787C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| Прибор для измерения и автоматической записи радиационного баланса | 1959 |
|
SU127452A1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| CN 105242023 A, 13.01.2016. | |||

