Изобретение относится к электротехнике и может быть использовано в электроприводах.
Известны исполнительные агрегаты электрических приводов опорно-поворотных устройств [1]. Недостатком является сложность конструкции и высокие массогабаритные показатели. Наиболее близким к предлагаемому решению является исполнительный агрегат электропривода, содержащий расположенные на одном магнитопроводе синхронный двигатель с возбуждением от постоянных магнитов, датчик скорости, выполненный на базе тахометрических обмоток двигателя и датчик положения потока ротора, выполненный на m датчиках Холла (ДХ), размещенных на зубцах магнитопровода статора, свободных от обмоток двигателя [2].
Недостатком такого решения является ограниченное количество зубцов, выделенных для размещения датчиков Холла датчика положения и тахометрических обмоток датчика скорости, поскольку их увеличение приводит к уменьшению момента двигателя [3]. В свою очередь, ограничение числа датчиков Холла и тахометрических обмоток приводит, во-первых, к ограничению плавности вращения вала агрегата (и нагрузки) за счет наличия пульсации момента в приводах с таким исполнительным агрегатом, так как размах пульсации момента определяется формулой [4]:
где n - число пакетов статора, m - число датчиков Холла в датчике положения,
и, во-вторых, к ограничению полосы пропускания привода за счет большой постоянной времени фильтра на выходе датчика скорости, поскольку величина пульсации выходного сигнала датчика скорости определяется формулой [4]:
Технический результат данного предложения заключается в увеличении числа датчиков Холла в датчике положения и числа тахометрических секций в датчике скорости и, соответственно, в повышении плавности вращения нагрузки и расширении полосы пропускания электропривода.
Указанный технический результат достигается тем, что исполнительный агрегат электропривода, содержащий расположенные на одном магнитопроводе синхронный двигатель с возбуждением от постоянных магнитов, датчик скорости, выполненный на базе тахометрических обмоток двигателя? и датчик положения потока ротора, выполненный на m датчиках Холла (ДХ), размещенных на зубцах магнитопровода статора, свободных от обмоток двигателя, согласно изобретению, магнитопровод статора содержит n идентичных пакетов, на каждом из которых размещены обмотки двигателя, тахометрические обмотки датчика скорости и m датчиков Холла датчика положения, при этом смежные пакеты развернуты в пространстве относительно друг друга одинаково на угол  радиан, обеспечивающий сдвиг фаз сигналов одноименных датчиков Холла на электрический угол
радиан, обеспечивающий сдвиг фаз сигналов одноименных датчиков Холла на электрический угол  .
.
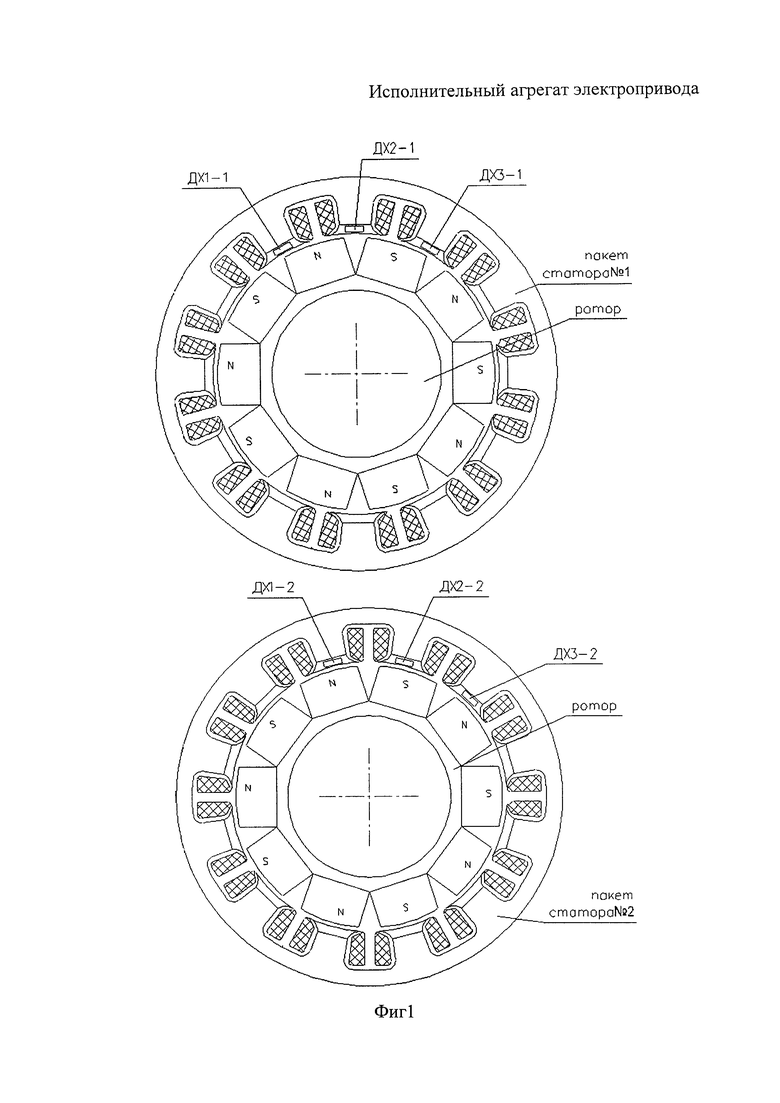
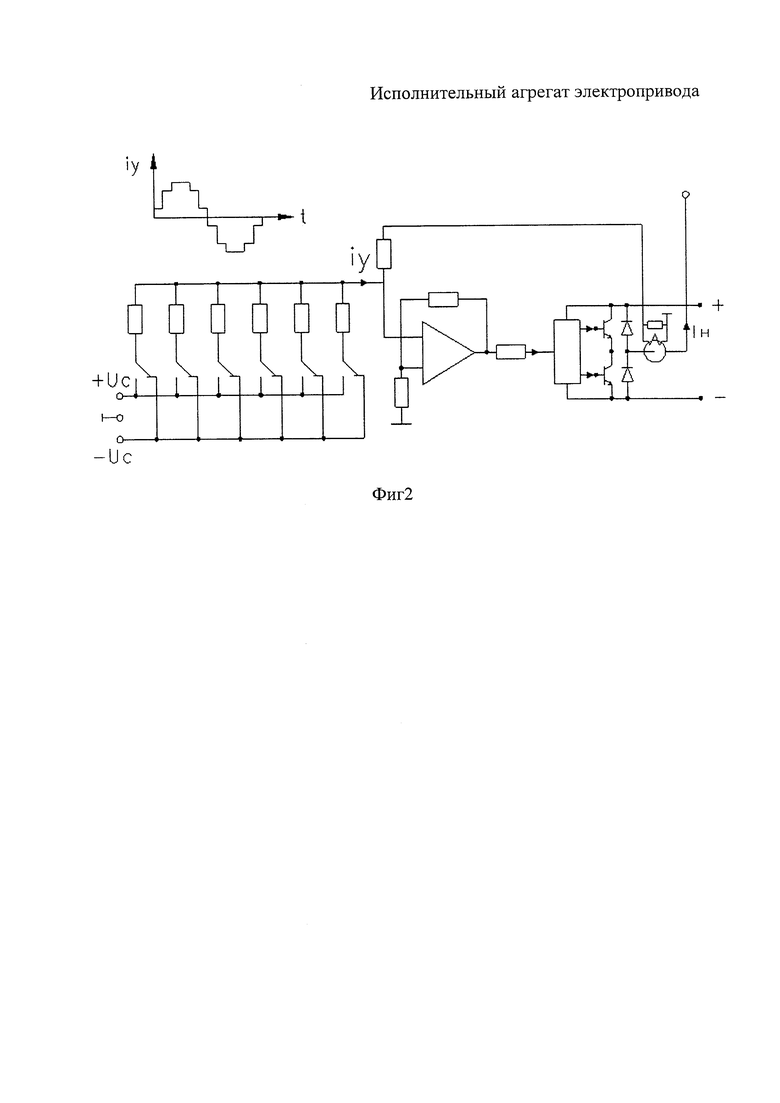
На фиг. 1 представлено взаимное расположение двух пакетов статора в двух (n=2) пакетном варианте исполнительного агрегата. На фиг. 2 представлена схема формирования токов статора с помощью сигналов датчиков Холла датчика положения. На фиг. 3 приведена схема датчика скорости.
Исполнительный агрегат содержит закрепленные в одном корпусе два пакета статора (№1 и №2), магнитопровод которых выполнен с Z=12 зубцами. Общий для двух пакетов ротор выполнен с 2p=10 полюсами.
Каждый пакет снабжен m=3 ДХ (1, 2, 3), составляющими датчик положения потока ротора и тремя секциями тахометрической обмотки датчика скорости, размещенными на зубцах с ДХ. На остальных зубцах размещены секции m-фазной обмотки исполнительного двигателя.
Пакеты развернуты относительно друг друга на пространственный угол  радиан (в данном случае на Δβ=15°) по или против часовой стрелки. При этом сдвиг фаз сигналов одноименных ДХ (например, 1-1 и 1-2) составляет величину
радиан (в данном случае на Δβ=15°) по или против часовой стрелки. При этом сдвиг фаз сигналов одноименных ДХ (например, 1-1 и 1-2) составляет величину  радиан или в данном случае при m= 3, n=2? Δαэл=30°. При этом общая длина пакетов должна быть равна длине магнитопровода однопакетного варианта исполнительного агрегата. Таким образом, конструкция предлагаемого исполнительного агрегата позволяет увеличить число ДХ в датчике положения без уменьшения числа зубцов, выделенных под обмотку двигателя, а значит и без уменьшения его момента.
радиан или в данном случае при m= 3, n=2? Δαэл=30°. При этом общая длина пакетов должна быть равна длине магнитопровода однопакетного варианта исполнительного агрегата. Таким образом, конструкция предлагаемого исполнительного агрегата позволяет увеличить число ДХ в датчике положения без уменьшения числа зубцов, выделенных под обмотку двигателя, а значит и без уменьшения его момента.
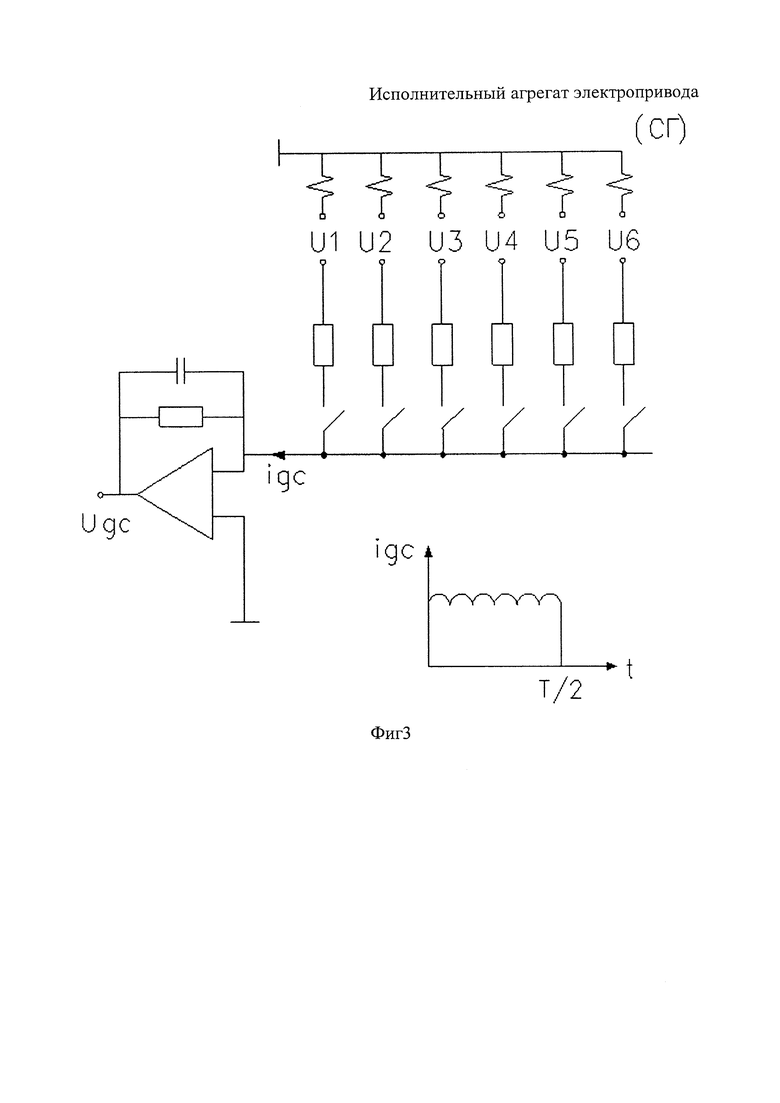
Увеличение числа ДХ в датчике положения агрегата дает возможность увеличить количество резистивно-ключевых схем (последовательного соединения резистора и ключа, управляемого сигналами ДХ) в формирователе тока управления усилителем мощности iy (фиг. 2). Последнее улучшает форму тока iy и, соответственно, тока статора исполнительного двигателя [4]. В результате уменьшаются пульсации момента (см. формулу 1) и, соответственно, повышается плавность вращения вала исполнительного агрегата и нагрузки.
В данном случае при n=2 и m=3 величина ΔМ уменьшается в 4 раза по сравнению с однопакетным вариантом (при n=1 и m=3) и составляет величину 3,4%.
Аналогичная картина будет и при построении датчика скорости (фиг. 3). При шести секциях тахометрической обмотки и шести резистивно-ключевых схемах пульсация выходного тока iДС датчика скорости, являющегося (как и раннее) суммой токов шести резистивно-ключевых схем, будет определяться формулой (2) и в данном случае составляет 3,4%. При этом частота пульсаций увеличивается в 2 раза. Это обстоятельство дает возможность уменьшить постоянную времени фильтра на выходе датчика скорости в 8 раз по сравнению с однопакетным вариантом исполнительного агрегата и расширить полосу пропускания привода, увеличив его точность.
Источники информации
1. А.С. СССР №978242. Привод опорно-поворотного устройства. Б.Н. Каржавов, В.Н. Бродовский, Ю.П. Рыбкин и др. 1982 г. БИ №44.
2. Каржавов Б.Н. Построение синхронных агрегатов для электроприводов с управлением моментом исполнительного двигателя. Электричество. 2013. БИ №4.
3. Беспалов В.Я., Каржавов Б.Н. Синхронные машины с зубцовым шагом обмотки в электрических следящих приводах. Электричество. 2017. БИ №6.
4. Каржавов Б.Н. Аппроксиматоры синусоидальных функции в электроприводах с управлением моментом исполнительных двигателей. Электричество. 2015 г., БИ №9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2653065C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД ПОВОРОТНОЙ ПЛАТФОРМЫ | 2017 |
|
RU2656999C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2019 |
|
RU2724926C1 |
| СИНХРОННЫЙ АГРЕГАТ | 1991 |
|
RU2076437C1 |
| МЕХАТРОННОЕ УСТРОЙСТВО | 2013 |
|
RU2543522C2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах. Техническим результатом является повышение плавности вращения нагрузки и расширение полосы пропускания электропривода. Исполнительный агрегат содержит синхронный двигатель с возбуждением от постоянных магнитов, датчик скорости, выполненный на базе тахометрических обмоток двигателя, и датчик положения потока ротора, выполненный на m датчиках Холла (ДХ), размещенных на зубцах магнитопровода статора, свободных от обмоток двигателя. Магнитопровод статора содержит n идентичных пакетов, на каждом из которых размещены обмотки двигателя, тахометрические обмотки датчика скорости и m датчиков Холла датчика положения, при этом смежные пакеты развернуты в пространстве относительно друг друга одинаково (по или против часовой стрелки) на угол, обеспечивающий сдвиг фаз сигналов одноименных датчиков Холла на электрический угол  радиан. 3 ил.
радиан. 3 ил.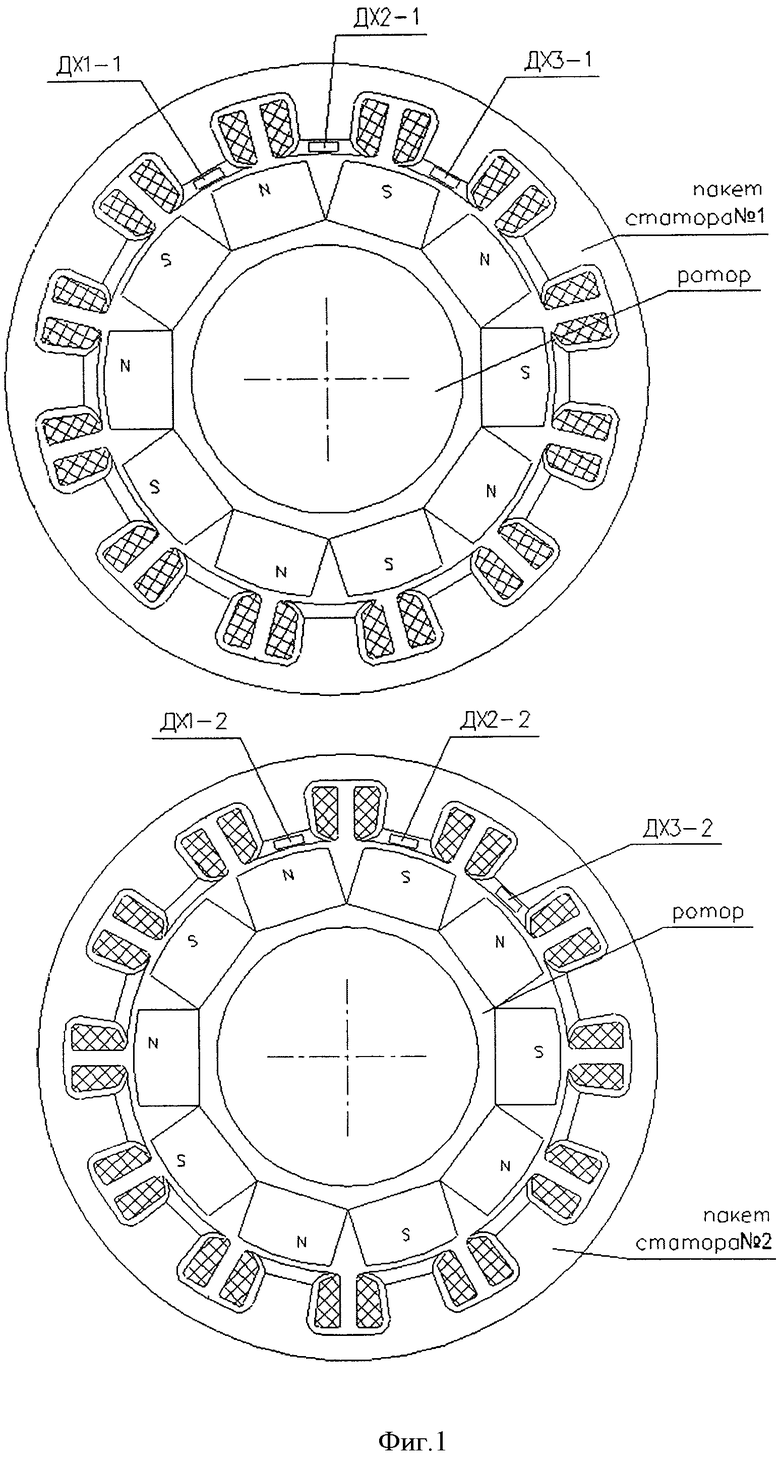
Исполнительный агрегат электропривода, содержащий расположенные на одном магнитопроводе синхронный двигатель с возбуждением от постоянных магнитов, датчик скорости, выполненный на базе тахометрических обмоток двигателя, и датчик положения потока ротора, выполненный на m датчиках Холла, размещенных на зубцах магнитопровода статора, свободных от обмоток двигателя, отличающийся тем, что магнитопровод статора содержит n идентичных пакетов, на каждом из которых размещены обмотки двигателя, тахометрические обмотки датчика скорости и m датчиков Холла датчика положения, при этом смежные пакеты развернуты в пространстве относительно друг друга одинаково по или против часовой стрелки на угол  , обеспечивающий сдвиг фаз сигналов одноименных датчиков Холла на электрический угол
, обеспечивающий сдвиг фаз сигналов одноименных датчиков Холла на электрический угол  радиан, где n - число пакетов статора, m - число датчиков Холла в датчике положения, Z - число зубцов магнитопровода.
радиан, где n - число пакетов статора, m - число датчиков Холла в датчике положения, Z - число зубцов магнитопровода.
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2061299C1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| СПОСОБ ЗАПУСКА ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2403432C2 |
| JP 2000078881 A, 14.03.2000 | |||
| US 7714429 B2, 11.05.2010 | |||
| EP 1351375 A1, 08.10.2003. | |||

