Изобретение относится к электротехнике и может быть использовано в следящих системах регулирования.
Известны приводы поворотных устройств, содержащие блоки управления и электродвигатели [1], недостатком которых является сложность и громоздкость конструкции двигателей при использовании их в приводах поворотных платформ [2].
Наиболее близким к предлагаемому решению является многодвигательный привод поворотной платформы, содержащий n равномерно размещенных по периметру платформы идентичных двигателей, снабженных m-фазными датчиками положения ротора и скорости вращения, а также блок управления [3].
Недостатком такого привода является ограниченная плавность вращения (в основном вызванная несинусоидальностью токов статора), особенно при использовании дискретных (или аналоговых, но с дискретным выходом [3]) датчиков положения ротора, а также большая постоянная времени сглаживающего фильтра на выходе датчика скорости, ограничивающая полосу пропускания привода.
Технический результат данного предложения заключается в повышении плавности вращения платформы и расширении полосы пропускания. Указанный технический результат достигается путем уменьшения пульсации тока в обмотках двигателей и уменьшения пульсации на выходе датчика скорости. Для этого в известном многодвигательном приводе поворотной платформы, содержащем n равномерно размещенных по периметру платформы идентичных двигателей, снабженных m-фазными датчиками положения ротора и скорости его вращения, согласно изобретению роторы или статоры смежно расположенных двигателей развернуты в пространстве одинаково на угол  , обеспечивающий сдвиг фаз указанных датчиков на электрический угол
, обеспечивающий сдвиг фаз указанных датчиков на электрический угол  радиан, где n - число двигателей, Z - число зубцов магнитопроводов двигателей, m - число фаз датчиков положения ротора.
радиан, где n - число двигателей, Z - число зубцов магнитопроводов двигателей, m - число фаз датчиков положения ротора.
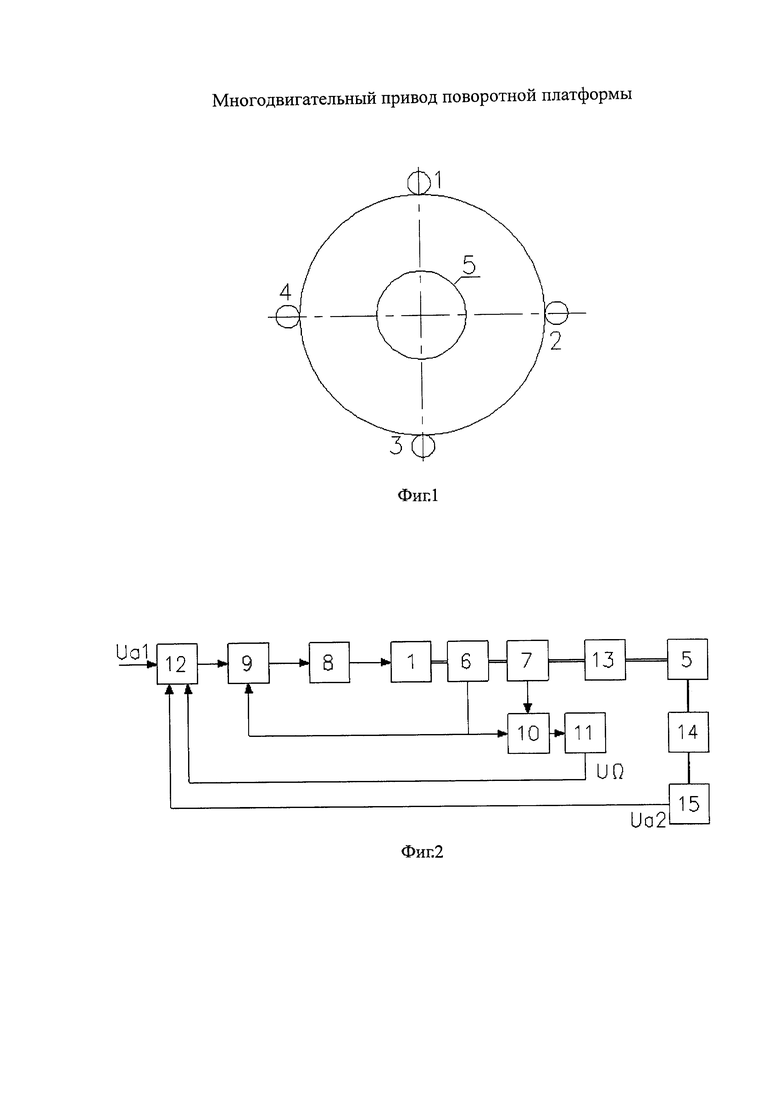
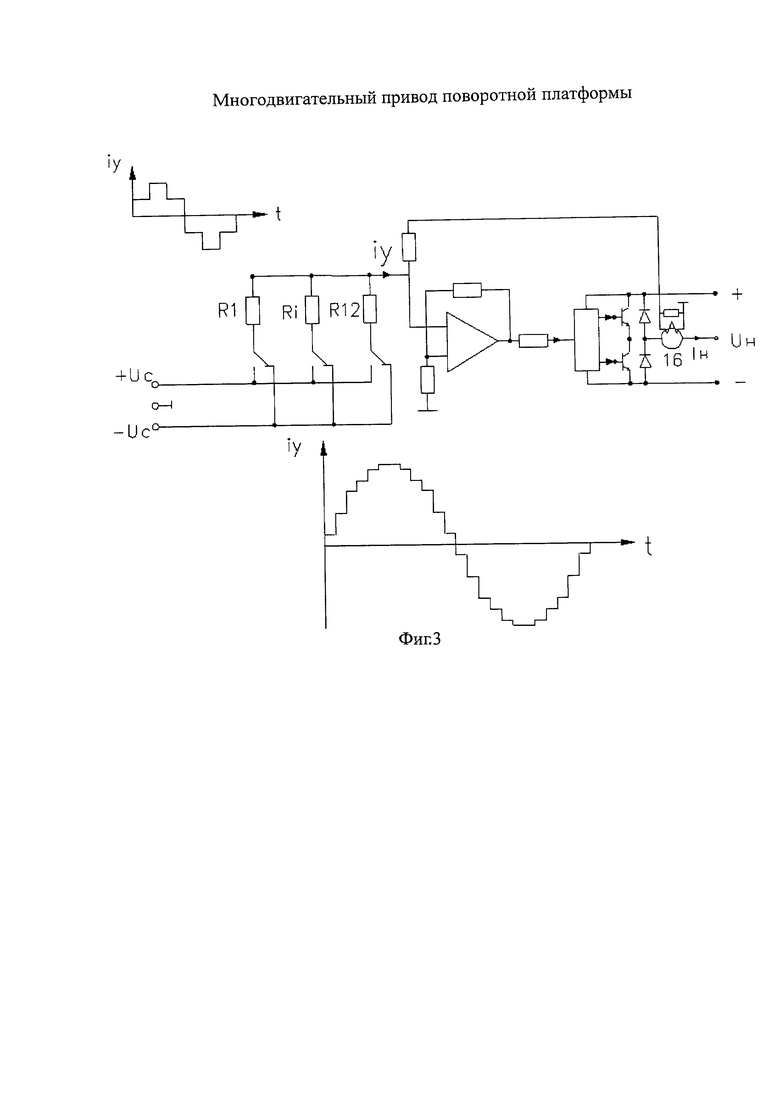
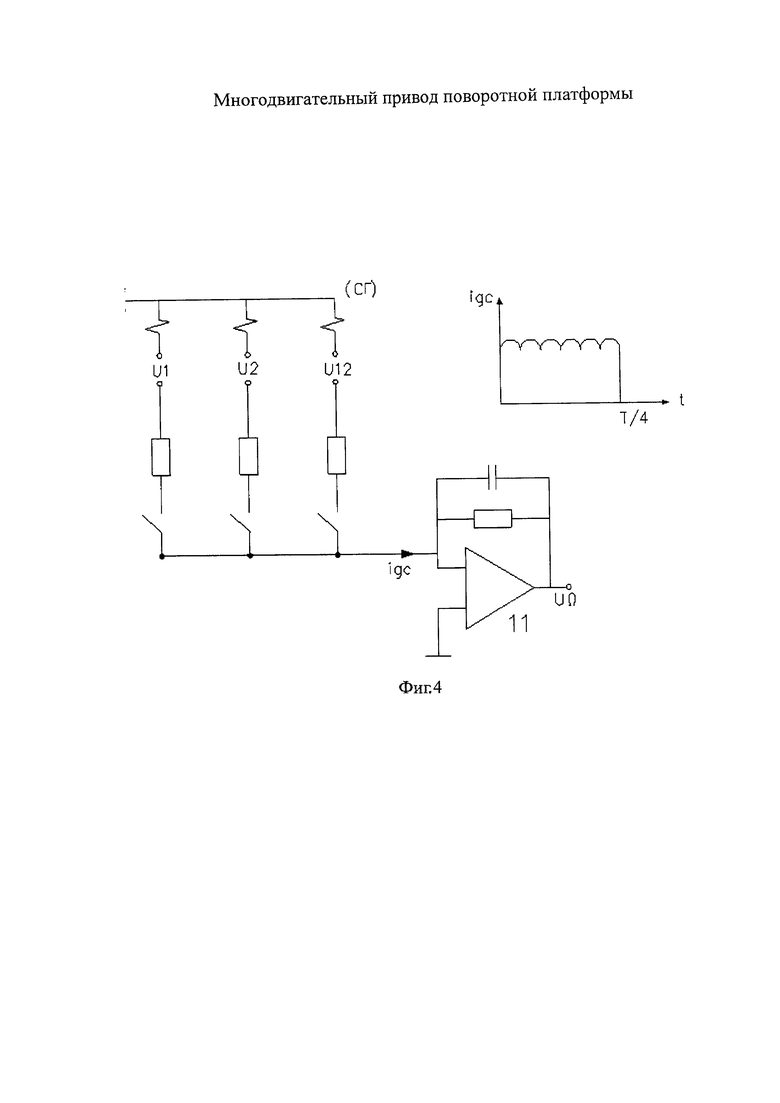
На фиг. 1 показано (условно) размещение двигателей многодвигательного привода на платформе. На фиг. 2 представлена структурная схема предлагаемого привода. На фиг. 3 приведена электрическая схема одной фазы трехфазного усилителя мощности с формирователем управляющих сигналов на входе. На фиг. 4 показана схема датчика скорости с фильтром на входе.
Привод содержит четыре (в общем случае) n идентичных исполнительных двигателя 1-4 (фиг. 1), размещенных равномерно по периметру платформы, в центре которой по оси ее вращения расположена нагрузка 5 (например, теодолит [2]). Обмотки двигателей соединены последовательно с целью равномерного распределения нагрузки по всем двигателям.
Собственно привод выполнен с моментным способом управления [3], при котором входному сигналу соответствует момент двигателя, в данном случае суммарный момент четырех двигателей. В качестве двигателей обычно используют асинхронные двигатели с зубцовым шагом обмотки, а в качестве датчика положения ротора - набор датчиков Холла (ДХ), размещенных на зубцах двигателя [3]. В данном случае каждый двигатель снабжен тремя (по числу фаз m) ДХ, которые размещаются, как правило, на трех соседних зубцах магнитопровода. Статоры (или роторы) двигателей развернуты в пространстве на некоторый угол Δβ, например, по часовой стрелке. Поэтому по отношению к первому второй двигатель развернут на угол Δβ, третий - на угол 2Δβ, а четвертый - на угол 3Δβ. В том случае, когда ДХ расположены на трех соседних зубцах (что бывает не всегда), то угол  , где Z - число зубцов статора двигателя, например, с зубцовым шагом обмотки, при этом электрический угол
, где Z - число зубцов статора двигателя, например, с зубцовым шагом обмотки, при этом электрический угол  радиан. В качестве измерителя скорости вращения двигателя используют тахометрические обмотки, размещенные на зубцах с ДХ.
радиан. В качестве измерителя скорости вращения двигателя используют тахометрические обмотки, размещенные на зубцах с ДХ.
Управление двигателями осуществляется от блока управления, содержащего кроме электронных устройств еще и блок питания. Структурная схема привода показана на фиг. 2.
Она содержит исполнительный двигатель 1 (равный по мощности четырем двигателям реального привода), датчик положения ротора 6 на N=n⋅m=12 ДХ, измеритель скорости вращения 7 на двенадцати секциях тахометрических обмоток, усилитель мощности 8 с формирователем управляющих сигналов 9 на входе, преобразователь напряжения 10 измерителя скорости 7 в реверсивный сигнал постоянного тока с фильтром 11 на выходе, а также входное устройство 12. Кроме того, в схему входят силовой редуктор 13, нагрузка 5, приборный редуктор 14 и датчик угла 15, являющийся датчиком главной обратной связи.
Усилитель мощности 8 (фиг. 3) в моментных приводах выполняется как регулятор тока, для чего охватывается отрицательной обратной связью по току с помощью трансформатора тока 16. Управление усилителем мощности осуществляется от формирователя управляющих сигналов 9, задающего величину и форму кривой статорного тока двигателей. Формирователь 9 построен на n⋅m резистивно-ключевых схемах [3], ключи которых управляются сигналами ДХ фиг. 3, где величина n⋅m выбрана равной 4⋅3=12. Суммарный сигнал указанных схем и являются сигналом управления iy усилителя мощности. Поскольку выходные сигналы ДХ сдвинуты по фазе на угол  , то форма сигнала iy и статорного тока двигателя будет иметь вид квазисинусоидальной ступенчатой кривой с n⋅m ступенями в полупериоде (см. фиг. 3).
, то форма сигнала iy и статорного тока двигателя будет иметь вид квазисинусоидальной ступенчатой кривой с n⋅m ступенями в полупериоде (см. фиг. 3).
При такой форме тока и синусоидальной форме потока выражение для момента имеет вид [3]:
При этом размах пульсации момента определяется формулой:
Для рассматриваемого случая, когда n=4, m=3, величина ΔM`=0,85%.
Аналогичным способом построен и преобразователь напряжения 10 измерителя скорости вращения 7, совокупность которых и образуют датчик скорости ДС.
На фиг. 4 показана схема ДС с фильтром 11 на выходе. Преобразователь 10 построен как синхронный детектор (выпрямитель) выходных напряжений n⋅m секции тахометрических обмоток двигателей и содержит n⋅m (12) резисторно-ключевых схем, управляемых сигналами ДХ. Выходным сигналом ДС является суммарный ток iДС n⋅m резисторно-ключевых схем, выражение для которого имеет вид [3]:
а размах пульсации скорости будет определяться формулой:
На фиг. 4 приведена форма выходного сигнала, где iДС значения n⋅m=12. При необходимости уменьшить величину ΔiДС на выходе преобразователя 10 можно включить фильтр 11 на операционном усилителе, как показано на фиг. 4.
Входное устройство 12 (фиг. 2) содержит два узла сравнения, на которые подаются: сигнал задания Uα1, сигнал Uα2 с выхода датчика угла 15 и сигнал датчика скорости UΩ с выхода фильтра 11. Кроме того, входное устройство содержит усилители, формирующие напряжения ±Uy (фиг. 3) для формирователей управляющих сигналов 9.
Привод работает следующим образом. При подаче на вход привода сигнала задания Uα1 входное устройство вырабатывает на выходе напряжения ± Uс для подачи на вход формирователя управляющих сигналов. Последний вырабатывает ток управления iy, обеспечивая необходимую величину выходного тока усилителя мощности. Следствием этого является образование момента на валу двигателя (или двигателей). Если величина ΔUΩ=Uα1-Uα1-UαΩ оказывается положительной, привод начинает набирать обороты, а если отрицательной, то привод начинает тормозиться с последующим реверсом при отрицательном значении величины Uα1.
Таким образом, предложенный многодвигательный (четырехдвигательный в данном случае) привод обеспечивает более высокую плавность вращения (пульсация момента и выходного напряжения датчика скорости уменьшена в 16 раз по сравнению с многодвигательным приводом без разворота статоров ИД при увеличении частоты пульсации в 4 раза). Последнее, в частности, дает возможность уменьшить постоянную времени фильтра, расширив тем самым полосу пропускания привода.
Источники информации
1. A.c. СССР №978242. Привод опорно-поворотного устройства. Б.Н. Каржавов, В.Н. Бродовский, Ю.П. Рыбкин и др. Б 1982 г. №44.
2. Высокоточные системы управления и приводы для вооружения и военной техники / Под редакцией В.Л. Солупина. М.: Изд-во МГТУ им. Баумана, 1999 г.
3. Баранов М.В., Бродовский В.Н., Зимин А.В., Каржавов Б.Н. Электрические следящие приводы с моментным управлением исполнительными двигателями. М.: Изд-во МГТУ им. Баумана, 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2656882C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2019 |
|
RU2724926C1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2653065C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Датчик положения ротора | 1979 |
|
SU817895A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2348098C1 |
| Балансирующее устройство многодвигательного электропривода | 1980 |
|
SU875567A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2003 |
|
RU2241298C1 |
Изобретение относится к области электротехники и может быть использовано в следящих системах регулирования. Техническим результатом является повышение плавности вращения платформы (и нагрузки) и расширение полосы пропускания привода. Многодвигательный привод поворотной платформы содержит n равномерно размещенных по периметру платформы идентичных двигателей, каждый из которых снабжен m-фазными датчиками положения ротора и скорости его вращения, а также блок управления. При этом роторы (или статоры) смежно расположенных двигателей развернуты в пространстве одинаково (по или против часовой стрелки) на угол  обеспечивающий сдвиг фаз выходных напряжений указанных датчиков на электрический угол
обеспечивающий сдвиг фаз выходных напряжений указанных датчиков на электрический угол  радиан. 4 ил.
радиан. 4 ил.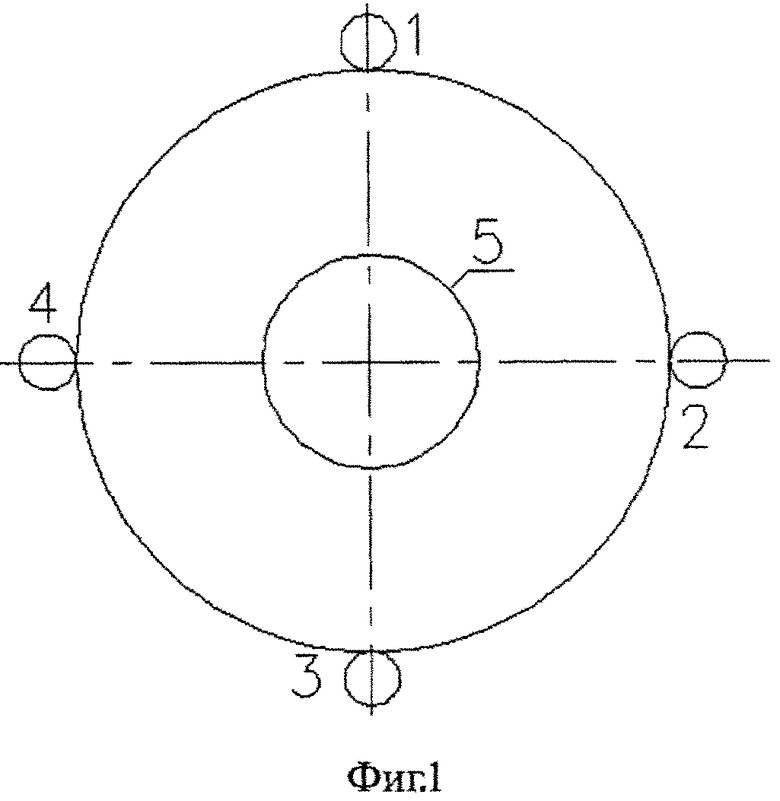
Многодвигательный привод поворотной платформы, содержащий n равномерно размещенных по периметру платформы идентичных двигателей, снабженных m-фазными датчиками положения ротора и скорости его вращения, отличающийся тем, что роторы или статоры смежно расположенных двигателей развернуты в пространстве одинаково на угол  , обеспечивающий сдвиг фаз указанных датчиков на электрический угол
, обеспечивающий сдвиг фаз указанных датчиков на электрический угол  радиан, где n - число двигателей, Z - число зубцов магнитопроводов двигателей, m - число фаз датчиков положения ротора.
радиан, где n - число двигателей, Z - число зубцов магнитопроводов двигателей, m - число фаз датчиков положения ротора.
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| ПРЕДОХРАНИТЕЛЬНЫЙ ВОРОТОК ДЛЯ МЕТЧИКОВ | 0 |
|
SU255748A1 |
| DE 3804634 A1, 24.08.1989 | |||
| US 4554989 A, 26.11.1985 | |||
| EP 1455438 A2, 08.09.2004 | |||
| WO 9305567 A1, 13.03.1993. | |||

