Изобретение относится к электротехнике и может быть использовано в следящих системах регулирования.
Известны электроприводы [1], в которых исполнительный двигатель, комбинированный датчик положения и датчик скорости выполнены на одном магнитопроводе [2] и содержащие схему разделения сигналов синхронного генератора и датчика положения. Недостатком таких приводов является сложность конструкции и схем преобразования сигналов синхронного генератора и датчика положения.
Наиболее близким к предлагаемому решению является электрический следящий привод, содержащий исполнительный агрегат (ИА), на валу которого размещены синхронный двигатель (СД), синхронный генератор (СГ) и датчик положения (ДП), выполненный на датчиках Холла, а также схему управления (СУ), включающую в себя входное устройство (ВУ), усилитель мощности (УМ) с формирователем управляющих сигналов (ФУС) на входе и преобразователь сигналов (ПС) синхронного генератора, выполненный на однофазных однополупериодных выпрямителях тока. Причем синхронный генератор и преобразователь сигналов синхронного генератора выполнены трехфазными [3].
Недостатком указанного электрического следящего привода является ограниченная мощность усилителя мощности и синхронного двигателя, высокая пульсация момента синхронного двигателя и выходного напряжения преобразователя сигналов синхронного генератора, а также большая постоянная времени сглаживающего фильтра преобразователя сигналов.
Технической задачей является упрощение конструкции и схем преобразования сигналов синхронного генератора и датчика положения, а также улучшение характеристик силовой части электропривода.
Технический эффект данного предложения заключается в увеличении выходной мощности и улучшении технических характеристик привода, а именно: увеличении момента двигателя и крутизны генератора, снижение пульсации момента и выходного напряжения преобразователя сигналов и уменьшение постоянной времени сглаживающего фильтра.
Поставленная техническая задача решается тем, что известный электрический следящий привод, содержащий исполнительный агрегат, на валу которого размещены синхронный двигатель, синхронный генератор и датчик положения, выполненный на датчиках Холла, а также схему управления (СУ), включающую в себя входное устройство, усилитель мощности с формирователем управляющих сигналов на входе и преобразователь сигналов синхронного генератора, выполненный на однополупериодных выпрямителях тока, причем синхронный генератор и преобразователь сигналов синхронного генератора выполнены трехфазными, а синхронный двигатель, усилитель мощности и формирователь управляющих сигналов выполнены двухфазными, при этом число зубцов в фазовой группе обмотки синхронного генератора выбрано равным n=cmг, где mГ - число фаз генератора, с - целое число, число зубцов в фазовой группе обмотки синхронного двигателя выбрано равным т=cmд, где mД - число фаз двигателя, а число зубцов, выделенных для размещения N датчиков Холла определяется формулой
m=N=cmгmд;
датчики Холла и секции обмотки синхронного генератора соответствующей фазы размещены на зубцах диаметрально расположенных групп; четные - на базовой, а нечетные - на диаметрально расположенной фазовой группе.
На фиг. 1 представлена структурная схема электрического следящего привода.
На фиг. 2а и 2б даны два способа расположения датчиков Холла: на фиг. 2а - при расположении датчиков Холла на зубцах одной фазовой группы; 2б - при расположении датчиков Холла на зубцах диаметральных фазовых групп.
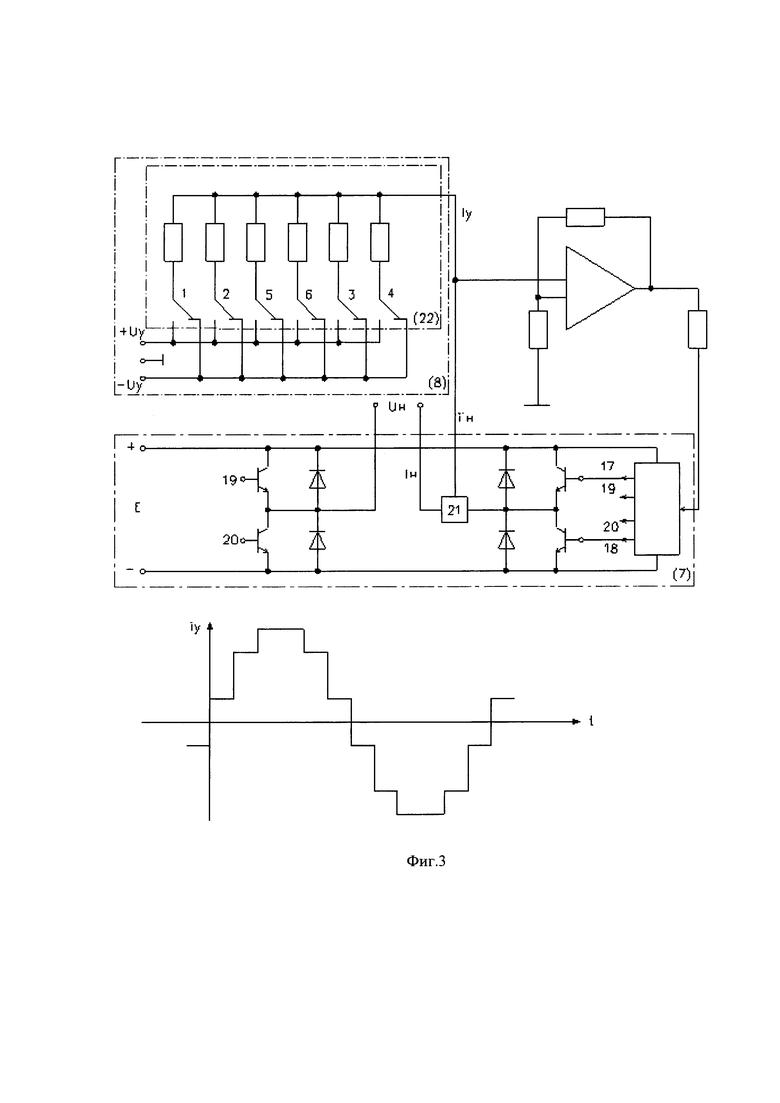
На фиг. 3 приведена схема одной фазы усилителя мощности с формирователем управляющих сигналов на входе. На фиг. 4 приведена схема преобразователя сигналов синхронного генератора в реверсивный сигнал постоянного тока.
Привод содержит (фиг. 1) исполнительный агрегат, в который входят синхронный двигатель 1 с зубчатым магнитопроводом и двухфазной обмоткой, синхронный генератор 2 с трехфазной обмоткой и датчик положения 3, выполненный на шести (m=3, n=1) датчиках Холла. Общий выходной вал исполнительного агрегата связан (непосредственно или через механический силовой редуктор) с нагрузкой 4, к которой (через приборный редуктор или непосредственно) подсоединен датчик угла 5 с электронным преобразователем угла (ПУ) 6, а также схему управления, в которую входят усилитель мощности 7, охваченный обратной связью по току, формирователь управляющих сигналов 8, входное устройство (ВУ) 9, сглаживающий фильтр 10, преобразователь сигналов синхронного генератора 11.
Исполнительный агрегат (фиг. 2а и 2б) выполнен на едином магнитопроводе с двадцатью четырьмя пазами и зубцами Z нa статоре 12 и 20 полюсами (Р=10) на роторе 13. Обмотка синхронного двигателя 14 выполнена двухфазной, а обмотка синхронного генератора - трехфазной по две (n=1) секции 15 в каждой фазе, размещенных на смежных зубцах, образующих фазовую группу.
Обмотки синхронного двигателя могут размещаться во всех пазах исполнительного агрегата или занимать только те пазы, где нет обмоток синхронного генератора. В последнем случае существенно уменьшается взаимоиндуктивность обмоток синхронного генератора и синхронного двигателя, которая ограничивает полосу пропускания электрического следящего привода. Элементы датчика положения - датчики Холла 16 и обмотки синхронного генератора могут размещаться на зубцах одной фазовой группы (фиг. 2а) или на зубцах диаметральных фазовых групп (фиг. 2б). Такое размещение секций обмоток синхронного генератора и расположение датчиков Холла обеспечивает снижение амплитуд четных гармоник (до трех раз) в выходном напряжении синхронного генератора и датчика положения, из которого могут возникнуть из-за технологических погрешностей изготовления и сборки исполнительного агрегата.
Усилитель мощности 7 выполнен двухфазным, каждая фаза которого (см. фиг. 3) содержит выходной каскад на четырех ключах 17-20 с трансформатором (датчиком) тока (ДТ) 21 на выходе для придания ему свойств усилителя тока. Это обеспечивает повышенное быстродействие и высокую надежность схемы электрического следящего привода. Управление усилителем мощности осуществляется от формирователя управляющих сигналов 8, выполненного на резисторно-ключевых схемах (РКС) 22, проводимость которых распределена по косинусному закону в соответствии с формулой:
Gij=С0сos[α0+π/N(i-1)-φ(j-1)],
где N - число датчиков Холла; α0=90°; ϕ=90°⋅(π/m); 1≤i≤6; 1≤j≤2.
Это обеспечивает близкую к синусоиде (квазисинусоидальную - см. фиг. 3) форму кривой статорного тока (с отсутствием высших гармоник с третьей по девятую включительно), что улучшает плавность вращения и уменьшает нагрев обмоток синхронного двигателя.
Управление ключами формирователя управляющих сигналов осуществляется сигналами датчиков Холла. Применение двухфазной схемы усилителя мощности повышает его выходную мощность (равную Р=2⋅E⋅I) по сравнению с выходной мощностью трехфазного инвертора (равную Р=√3⋅E⋅I) в 1,16 раза.
Преобразователь сигналов синхронного генератора 11 выполнен на шести (n=1, m=3) резистивно-ключевых схемах 23 (см. фиг. 4), управляемых сигналами датчиков Холла и выполняющих в данном случае роль однополупериодных выпрямителей тока. На вход выпрямителей тока подается напряжение с соответствующей секции обмотки СГ, напряжение на которой сдвинуто на 90 электрических градусов по отношению к сигналу одноименного датчика Холла. В этом случае на выходе преобразователя сигналов образуется напряжение (см. фиг. 4), идентичное выходному напряжению шестифазного двухполупериодного выпрямителя напряжения с пульсацией, определяемой величиной ΔU=1,24/N2, то есть в 4 раза меньшей амплитуды и в 2 раза большей частоты (ωпул=2⋅N⋅ω1), чем в схеме прототипа (при N=3) [4].
Это обстоятельство дает возможность в 8 раз уменьшить емкость конденсатора фильтра и, соответственно, его постоянную времени, что повышает полосу пропускания электрического следящего привода и увеличивает точность его работы.
Входное устройство 9 (фиг. 1) является узлом сравнения сигналов Uα, UΩ и сигнала задания угла Uα1, а также содержит выходной усилитель. Сглаживающий фильтр 10 (фиг.1) представляет собой интегропропорциональное звено с двумя входами для сигналов Uα2 и UΩ соответственно.
Привод работает следующим образом. При подаче на его вход сигнала задания угла Uα1 (фиг. 1) входное устройство 9 (с помощью входящих в него узлов сравнения) вырабатывает сигнал ошибки UΔ, являющийся управляющим сигналом (напряжением Uy на фиг. 1 и фиг. 3) для формирователя управляющих сигналов 8. Формирователь управляющих сигналов с помощью сигналов датчиков Холла датчика положения 3 вырабатывает сигнал (ток iy) управления усилителем мощности 7, который формирует ток статора СД для создания вращающего момента М. Если величина ошибки UΔ=Uy=Uα1-Uα2-UΩ - положительная, привод начинает набирать обороты, а если Uy - отрицательная, то привод тормозится с последующим реверсом при отрицательном значении Uα1.
Формирование сигнала главной обратной связи по углу Uα с помощью суммирования двух сигналов Uα2 с выхода преобразователя угла 6 (рис. 1) и UΩ с выхода преобразователя сигналов СГ 11 на входе интегропропорционального звена (сглаживающего фильтра 10) сделано для исключения запаздывания в формировании сигнала Uα2.
Таким образом, предлагаемый двухфазный электрический следящий привод обеспечивает повышенную (на 16% по сравнению с трехфазной схемой) мощность при одних и тех же значениях тока через силовые ключи усилителя мощности 7 и напряжения питания Е и меньшие потери мощности в СД (более высокий КПД) и, соответственно, уменьшая его нагрев. При этом увеличивается плавность вращения за счет снижения пульсаций момента (ΔМ/М=1,24/N2 и выходного напряжения ПС в 4 раза [4].
Кроме того, за счет уменьшения запаздывания в цепи формирования скоростного и углового сигналов расширяется полоса пропускания электрического следящего привода и увеличивается точность в отработке входного сигнала, в том числе и на высоких частотах его изменения.
Источники информации
1. Патент РФ №2087068 БИ №22 1997 г. Электропривод. В.Н. Бродовский, Б.Н. Каржавов, В.П. Петухов, Ю.П. Рыбкин;
2. Патент РФ №2112309 БИ №15 1998 г. Электроагрегат. В.Н. Бродовский, Б.Н. Каржавов, В.П. Петухов, Ю.П. Рыбкин;
3. Патент РФ №2392730 БИ №17 2010 г. Электрический следящий привод. Б.Н. Каржавов, Н.В. Буторин, В.Н. Бродовский;
4. М.В. Баранов, В.Н. Бродовский, А.В. Зимин, Б.Н. Каржавов. Электрические следящие приводы с моментным управлением исполнительными двигателями. М. Из-во МГТУ имени Н.Э. Баумана, 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД ПОВОРОТНОЙ ПЛАТФОРМЫ | 2017 |
|
RU2656999C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2653065C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2656882C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2061299C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |




Изобретение относится к области электротехники и может быть использовано в следящих системах регулирования. Технический результат заключается в увеличении выходной мощности и улучшении технических характеристик привода, а именно: в увеличении момента двигателя и крутизны генератора, снижении пульсации момента и выходного напряжения преобразователя сигналов и уменьшении постоянной времени сглаживающего фильтра. Электрический следящий привод содержит исполнительный агрегат, на валу которого размещены синхронный двигатель, синхронный генератор и датчик положения, выполненный на датчиках Холла, а также схему управления, включающую в себя входное устройство, усилитель мощности с формирователем управляющих сигналов на входе и преобразователь сигналов синхронного генератора, выполненный на однополупериодных выпрямителях тока. Синхронный генератор и преобразователь сигналов синхронного генератора выполнены трехфазными, а синхронный двигатель, усилитель мощности и формирователь управляющих сигналов выполнены двухфазными. Число зубцов в фазовой группе обмотки синхронного генератора выбрано равным n=cmг, где mГ - число фаз генератора, с - целое число; число зубцов в фазовой группе обмотки синхронного двигателя выбрано равным n=cmд, где mД - число фаз двигателя, а число зубцов, выделенных для размещения N датчиков Холла, определяется формулой: n=N=cmгmд. Датчики Холла и секции обмотки синхронного генератора соответствующей фазы размещены на зубцах диаметрально расположенных групп; четные - на базовой, а нечетные - на диаметрально расположенной фазовой группе. 1 з.п. ф-лы, 5 ил.
1. Электрический следящий привод, содержащий расположенные на одном валу исполнительный двигатель, датчик положения ротора, выполненный на датчиках Холла, и синхронный генератор как датчик скорости вращения, а также усилитель мощности, формирователь управляющих сигналов и преобразователь напряжения синхронного генератора в тахометрический сигнал корректирующей цепи, причем синхронный генератор и преобразователь напряжения выполнены трехфазными, отличающийся тем, что исполнительный двигатель, формирователь управляющих сигналов и усилитель мощности выполнены двухфазными, для чего число зубцов в фазовой группе обмотки синхронного генератора выбрано равным n=cmг, где mГ - число фаз генератора, с - целое число, число зубцов в фазовой группе обмотки синхронного двигателя выбрано равным n=сmд, где mД - число фаз двигателя, а число зубцов, выделенных для размещения N датчиков Холла определяется формулой
n=N=cmгmд.
2. Электрический следящий привод по п. 1, отличающийся тем, что датчики Холла и секции обмотки синхронного генератора соответствующей фазы размещены на зубцах диаметрально расположенных групп: четные - на базовой, а нечетные - на диаметральной фазовой группе.
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2656882C1 |
| DE 4310772 A1, 31.07.1975 | |||
| JP 4281167 B2, 17.06.2009 | |||
| US 7872436 B2, 18.01.2011 | |||
| Способ переработки кусковых отходов твердых сплавов | 1945 |
|
SU65614A1 |
| МАГНИТНЫЙ РАЗЪЕМНЫЙ НЕГАТИВ | 1995 |
|
RU2093112C1 |
| CN 1823310 B, 13.10.2010. | |||

