Заявляемые технические решения относятся к области радиолокации и могут быть использованы для сокращения времени, затрачиваемого на сопровождение цели.
Контроль пространства состоит из двух этапов: обнаружение цели и ее сопровождение по дальности и угловым координатам [Справочник по радиолокации. Ред. М. Сколник, т. 4, с. 49, «Сов. Радио», М., 1978 г.]. Выполнение этих задач усложняется в условиях воздействия пассивных помех: местные предметы (горы, лес, поверхность моря), метеообразования (облака, дождь, снег и т.п.), но наиболее опасными являются искусственные помехи, так как они имеют наиболее широкий спектр скоростей, локализованных в области скоростей цели [Справочник по радиолокации. Ред. М. Сколник, т. 3, с. 289, «Сов. Радио», М., 1978 г.].
Для обнаружения цели на фоне пассивных помех и для ее сопровождения, используют сигналы и режимы, обеспечивающие селекцию движущихся целей. Например, используют режим с многопериодным n≥3 излучением в одном направлении, где n - число зондирующих импульсов, излучаемых в n - периодах излучения (для обеспечения однозначности по дальности), или широкополосные сигналы, протяженные во времени с внутриимпульсной (например, частотной) модуляцией. [Я.Д. Ширман, В.Н. Голиков - Основы теории обнаружения радиолокационных сигналов и измерения их параметров. «Сов. Радио», М., 1963 г., с. 5, 219, рис. 7.14]. Как видно из указанного в источнике рисунка для повышения точности определения дальности необходимо увеличивать ширину спектра сигнала, а для повышения селективности необходимо увеличивать длительность сигнала.
Однако есть ограничение на длительность сигнала - увеличивается мертвая (слепая) зона или минимальная дальность обнаружения [Справочник по радиолокации. Ред. М. Сколник, т. 1, с. 105, 4-й абзац снизу, «Сов. Радио», М., 1978 г.].
Таким образом, длительность зондирующего сигнала, определяющая разрешение по скорости, ограничивается допустимой величиной мертвой зоны, а возможность сокращения времени обзора направления (периода повторения зондирующего сигнала) ограничивается максимальной дальностью обзора этого направления. Одним из способов уменьшения мертвой зоны является использование когерентной пачки коротких импульсов [Я.Д. Ширман, В.Н. Голиков - Основы теории обнаружения радиолокационных сигналов и измерения их параметров. «Сов. Радио» М., 1963 г., с. 221, рис. 7.16]. Такая пачка позволяет обеспечивать разрешение по скорости, но обладает неоднозначностью по дальности и для ее устранения требуются дополнительные затраты времени как для этапа обнаружения, так и сопровождения.
Наиболее близким к заявляемому способу является способ сопровождения цели, заключающийся в обнаружении цели, выработке строба сопровождения и в осмотре его в очередной период с использованием двух или более импульсов [Справочник по радиолокации. Ред. М. Сколник, т. 4, с. 52, «Сов. Радио», М., 1978 г.], [С.В. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации, «Радио и связь», М., с. 108-110]. Суть этого способа состоит в том, что на первом этапе обнаруживают цель, а на втором - сопровождают. После второго обзора определяется изменение местоположения цели и определяется направление и скорость цели или группы целей. На основании этих данных прогнозируют положение цели на следующий обзор и выставляется широкий строб, чтобы исключить потерю цели. Под стробом понимают пространственный объем, ограниченный интервалом дальности и интервалом угловых координат. Внутри этого объема прогнозируется положение цели к следующему обзору направления. При последующих обзорах уточняют информацию о цели, осуществляют сужение строба и выделение одиночной цели. В условиях воздействия пассивных помех необходимо многократное (не менее двух) зондирование направления для селекции по скорости движущейся цели. [Справочник по радиолокации. Ред. М. Сколник, т. 3, с. 281, РЛС с селекцией движущихся целей, «Сов. Радио», М., 1979 г.]. Двукратное (череспериодное) вычитание обеспечивает подавление пассивной помехи и селекцию цели, но в ограниченном интервале скоростей, до первой слепой скорости. Под слепой скоростью понимают такую скорость цели, при которой вычитается сигнал и помехи, и цели. Поэтому для исключения слепых скоростей необходимо не менее, чем трехкратное зондирование (трехкратное вычитание) [там же, с. 319].
Достоинство такого способа состоит в том, что он позволяет завязывать трассу для отдельных целей.
Недостаток этого способа сопровождения заключается в том, что для селекции целей в условиях воздействия пассивных помех и исключения слепых скоростей осуществляют n≥2-кратное зондирование направления. Но при этом не используют информацию о дальности до цели, полученную на этапе обнаружения.
Таким образом, поставленной проблемой (техническим результатом) является сокращение времени, затрачиваемого на осмотр направления при сопровождении цели в условиях воздействия пассивных помех.
Поставленная проблема (технический результат) решается за счет использования информации о дальности до цели, полученной при ее обнаружении и использовании сигналов с неоднозначностью по дальности (излучение n≥2-импульсов в одном периоде, поскольку дальность до цели определена).
Техническая проблема (технический результат) по первому варианту решается тем, что в способе сопровождения цели обзорной радиолокационной станцией, заключающемся в обнаружении цели, выработке строба сопровождения и осмотр его в очередной период с использованием последовательности двух или более импульсов, согласно изобретению, при установке параметров последовательности обеспечивают однозначность определения дальности до цели в пределах строба сопровождения.
Техническая проблема (технический результат) по второму варианту решается тем, что в способе сопровождения цели обзорной радиолокационной станцией, заключающемся в обнаружении цели, выработке строба сопровождения и осмотре его в очередной период, согласно изобретению, для осмотра используют протяженные в пределах допустимой мертвой зоны, определяемой расстоянием до строба, широкополосные сигналы с разрешающей способностью по скорости.
Суть предлагаемых изобретений заключается в том, что используют свойство функции неопределенности в радиолокации при выборе типа сигнала при сопровождении цели в пассивных помехах.
Разрешающая способность по дальности и по скорости зависит от параметров сигнала. Выбор параметров сигнала определяют из условий: максимальная длительность импульса - исходя из допустимого размера мертвой зоны; частота повторения - исходя из максимальной дальности обзора. РЛС обзора обнаруживает цель в условиях воздействия пассивных помех, используя многократное зондирование направления широкополосными сигналами и формирует строб первичного захвата цели в этом направлении. Далее, по первому варианту радиолокационная станция (РЛС) использует зондирующий сигнал в виде пачки импульсов. Интервал между импульсами в пачке выбирают заведомо большим ширины строба по дальности, таким, чтобы в стробе мог находиться лишь один отраженный от цели импульс из пачки, соответствующий истинной дальности до цели. Этот сигнал используют для завязывания трассы. Пачка излученных импульсов имеет большую протяженность во времени (диаграмма а) и ее используют для подавления сигналов от пассивной помехи, так как функция неопределенности для таких сигналов локализована на оси скоростей [Д.Е. Вакман - Сложные сигналы и принцип неопределенности в радиолокации. «Сов. Радио», 1965 г., с. 65, второй абзац снизу], а доплеровский спектр скоростей цели и помехи различен [Справочник по радиолокации т. 3, ред. М. Сколник. «Сов. Радио», М. 1979 г., с. 281, 289].
По второму варианту предусматривают использование сигналов, протяженность которых ограничена величиной мертвой зоны (до строба), которая при достаточном удалении цели может позволить формирование протяженного сигнала с линейной частотной модуляцией, для того чтобы селектировать сигналы по скорости и иметь разрешение по дальности.
Таким образом, за счет излучения n≥2-импульсов в одном периоде зондирования (первый вариант) или за счет формирования протяженных сигналов (в зависимости от дальности до сопровождаемой цели) (второй вариант) решается техническая проблема и достигается технический результат.
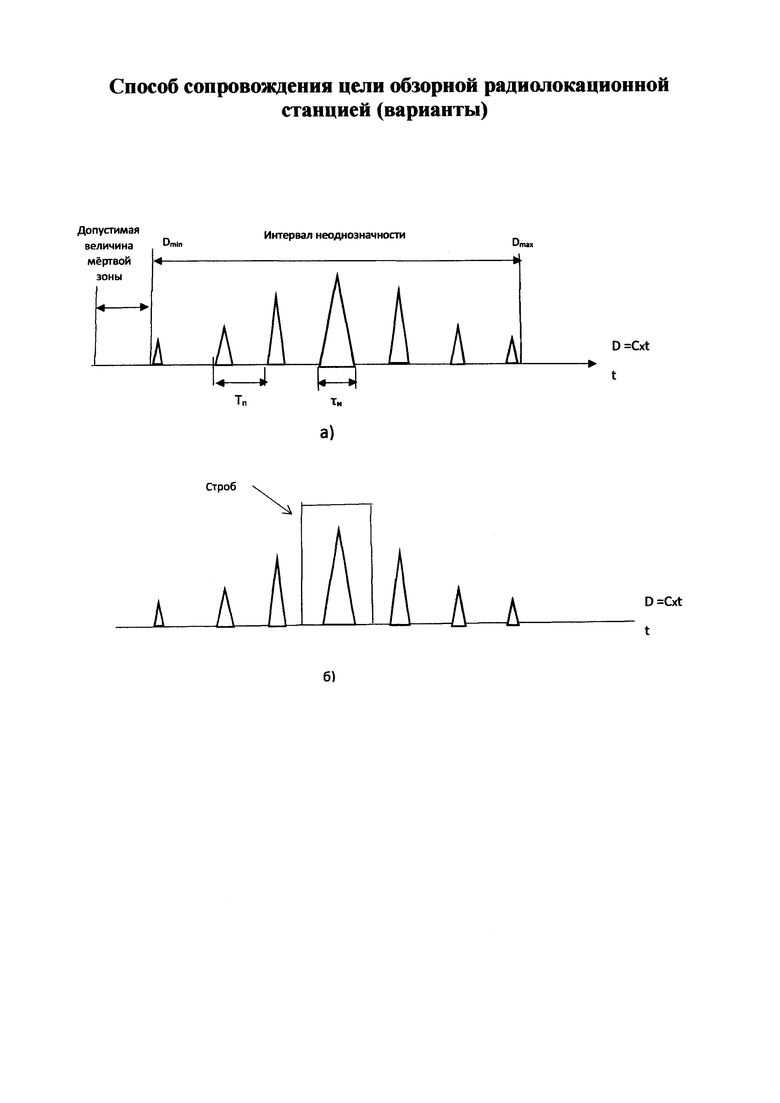
Изобретение иллюстрируется чертежом.
На чертеже приведены диаграммы, поясняющие вид, расстояние D=C×t и временное положение t сигналов пачки и строба.
На диаграмме а) показана допустимая величина мертвой зоны Dmin, (пространство, где цели отсутствуют), неоднозначность определения дальности и ее максимальное значение в пределах интервала Dmin-Dmax, принятого при использовании пачки коротких когерентных импульсов сигнала τи с периодом Тп после прохождения через селектор движущихся целей и оптимальный фильтр.
На диаграмме б) показаны относительные положения пачки принятых сигналов и строба.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухэтапный способ измерения координат цели и устройство для его осуществления | 2017 |
|
RU2645741C1 |
| Способ радиолокационного обзора пространства, радиолокационная станция для его осуществления и радиолокационный передающий модуль | 2017 |
|
RU2671234C1 |
| Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления | 2017 |
|
RU2667485C1 |
| Двухэтапный способ радиолокационного обнаружения цели | 2016 |
|
RU2633995C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| Способ двухэтапного радиолокационного обзора пространства (варианты) | 2016 |
|
RU2637784C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ СКОПЛЕНИЙ ОБНАРУЖЕННЫХ СИГНАЛОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536182C2 |
Изобретение относится к области радиолокации. Достигаемый технический результат - сокращение времени, затрачиваемого на осмотр направления при сопровождении цели в условиях воздействия пассивных помех. Указанный результат по первому варианту достигается тем, что в способе сопровождения цели обзорной радиолокационной станцией, заключающемся в обнаружении цели, выработке строба сопровождения и осмотре его в очередной период с использованием последовательности двух или более импульсов, при этом при установке параметров последовательности обеспечивают однозначность определения дальности до цели в пределах строба сопровождения. Указанный результат по второму варианту достигается тем, что в способе сопровождения цели обзорной радиолокационной станцией, заключающемся в обнаружении цели, выработке строба сопровождения и осмотре его в очередной период для осмотра, при этом используют протяженные в пределах допустимой мертвой зоны, определяемой расстоянием до строба, широкополосные сигналы с разрешающей способностью по скорости. 2 н.п. ф-лы, 1 ил.
1. Способ сопровождения цели обзорной радиолокационной станцией, заключающийся в обнаружении цели, выработке строба сопровождения и осмотре его в очередной период с использованием последовательности двух и более зондирующих импульсов, отличающийся тем, что при установке последовательности зондирующих импульсов обеспечивают однозначность определения дальности до цели в пределах строба сопровождения, при этом параметрами последовательности зондирующих импульсов являются максимальная длительность импульса, определяемая исходя из допустимого размера мертвой зоны, и частота повторения, определяемая из максимальной дальности обзора.
2. Способ сопровождения цели обзорной радиолокационной станцией, заключающийся обнаружении цели, выработке строба сопровождения и осмотр его в очередной период, отличающийся тем, что для осмотра используют протяженные в пределах допустимой мертвой зоны, определяемой расстоянием до строба, широкополосные сигналы с разрешающей способностью по скорости.
| КУЗЬМИН С.В | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| Москва, "Радио и связь", 1986, с.108-110 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| 0 |
|
RU2237265C | |
| JP 5197154 B2, 14.05.2003 | |||
| КОНФЕТА | 2012 |
|
RU2495583C1 |
| WO 2009059929 A1, 14.05.2009 | |||
| US 9002642 B2, 07.04.2015. | |||

