Заявляемое техническое решение относится к области радиолокации, в частности к области сопровождения траектории цели в обзорных радиолокационных станциях (РЛС).
Известный способ сопровождения траектории цели включает обнаружение в зоне обзора РЛС отражающего объекта, представляющего собой цель или источник пассивных помех, формирование стробов захвата, захват траектории, экстраполяцию траектории, формирование стробов сопровождения, фильтрацию траектории, прекращение сопровождения (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. - М., 1993, с.25-30).
Сопровождаемый отражающий объект представляет собой цель или источник пассивных помех. Цель - самолет, ракета или другой летательный аппарат, движущийся с достаточно большой скоростью. Источник пассивных помех - местные предметы, подстилающая поверхность, атмосферные облака, облака искусственных пассивных отражателей, создаваемых специально для подавления РЛС. Пассивные помехи неподвижны или движутся со скоростью, не превышающей скорость ветра.
Недостаток известного способа сопровождения траектории состоит в том, что в условиях пассивных помех формируется большое количество ложных траекторий, что снижает достоверность выдаваемой РЛС радиолокационной информации, приводит к перегрузке системы обработки радиолокационной информации.
Наиболее близкий к заявляемому способ сопровождения траектории цели включает обнаружение в зоне обзора РЛС отражающего объекта, представляющего собой цель или источник пассивных помех, формирование на следующем обзоре вокруг обнаруженного объекта строба захвата траектории, принятие решения об обнаружении цели в стробе захвата, экстраполяцию параметров траектории цели, формирование на каждом обзоре строба сопровождения, принятие решения об обнаружении цели в стробе сопровождения, фиксацию пропуска в обнаружении цели в стробе сопровождения для проверки критерия сброса траектории цели с сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, с.285-287).
При сопровождении траекторий по наиболее близкому способу в условиях естественных и искусственных пассивных помех формируется большое количество ложных траекторий. Это объясняется тем, что при достаточно большой плотности пассивных помех в стробах захвата и сопровождения часто вместо цели происходит обнаружение источников пассивных помех.
Ложные траектории ухудшают достоверность выдаваемой радиолокационной информации, приводят к перегрузке системы обработки радиолокационной информации. Это является недостатком наиболее близкого способа сопровождения траектории.
Решаемой задачей (техническим результатом), таким образом, является уменьшение количества ложных траекторий при сопровождении траекторий целей в условиях пассивных помех.
Указанный технический результат достигается тем, что способ сопровождения траектории включает обнаружение в зоне РЛС отражающего объекта, представляющего собой цель или источник пассивных помех, формирование на следующем обзоре вокруг обнаруженного объекта строба захвата траектории, принятие решения об обнаружении цели в стробе захвата, экстраполяцию параметров траектории цели, формирование на каждом обзоре строба сопровождения, принятие решения об обнаружении цели в стробе сопровождения, фиксацию пропуска в обнаружении цели в стробе сопровождения для проверки критерия сброса траектории цели с сопровождения, отличающийся тем, что для принятия на текущем обзоре упомянутого решения об обнаружении цели в стробе захвата или сопровождения дополнительно осматривают область зоны обзора РЛС, в которой объект был обнаружен на предыдущем обзоре, для чего при обнаружении объекта в стробе захвата или сопровождения на текущем обзоре формируют дополнительный строб, размеры которого определяют исходя из ошибок измерения координат объекта и наибольшего перемещения источника пассивных помех под действием ветра за период обзора, при этом, если в дополнительном стробе объект не обнаружен, то считают, что в стробе захвата или сопровождения обнаружена цель, и проводят дальнейшие операции соответственно по захвату или сопровождению ее траектории, если в дополнительном стробе объект обнаружен, то считают, что в стробе захвата или сопровождения обнаружен другой объект, и проводят операции по захвату его траектории, а сопровождение траектории цели, если оно осуществлялось на предыдущих обзорах, продолжают, фиксируя в сформированном на текущем обзоре стробе сопровождения пропуск в ее обнаружении.
Суть заявляемого технического решения заключается в следующем.
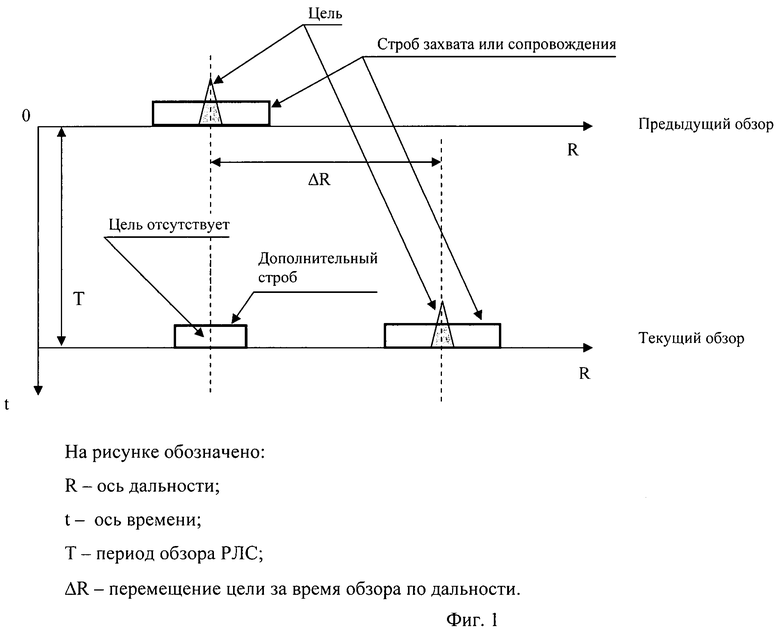
Движущаяся цель в каждый момент времени может находиться только в одной точке пространства. Это означает, что цель, появившись в каком-либо месте на текущем обзоре, исчезает из положения, в котором она находилась при предыдущем обзоре. Этот признак движущейся цели анализируется в заявляемом способе сопровождения траектории путем дополнительного осмотра на текущем обзоре области зоны обзора, в которой цель находилась при предыдущем обзоре (фиг.1).
В заявляемом изобретении указанный осмотр проводится в дополнительном стробе, размеры которого определяют исходя из ошибок измерения координат и наибольшего перемещения источника пассивных помех под действием ветра за период обзора.
При этом, если в процессе обнаружения или сопровождения траектории отражающий объекта (соответственно в стробе захвата или сопровождения) объект обнаружен, и в результате осмотра дополнительного строба, проводимого на том же обзоре, выяснилось, что в области зоны обзора, в которой объект находился при предыдущем обзоре, он отсутствует, то это означает, что за время обзора Т объект переместился на величину ΔR, и в стробе захвата или сопровождения обнаружен именно он (фиг.1). Такой объект следует считать целью и проводить дальнейшие операции по обнаружению или сопровождению траектории.
Если же в результате осмотра дополнительного строба выяснилось, что отражающий объект по-прежнему находится в области зоны обзора, в которой он находился при предыдущем обзоре, то это означает, что положение объекта в пространстве за время обзора не изменилось, а в стробе захвата или сопровождения на текущем обзоре обнаружен другой объект (пассивная помеха или другая цель). Экстраполяция траектории по такому объекту будет ошибочной и при захвате траектории приведет к появлению ложной траектории, а при сопровождении - к «уводу» траектории по ложному направлению. Поэтому координаты обнаруженного в стробе захвата или сопровождения объекта следует принять за начало новой траектории и осуществлять операции по ее захвату, а траекторию сопровождаемой цели (если на предыдущих обзорах проводилось ее сопровождение) следует продолжить, фиксируя в текущем стробе сопровождения пропуск в ее обнаружении.
Отметим, что поскольку пространственное положение отражающего объекта на предыдущем обзоре измерено, то размеры дополнительного строба определяют исходя из ошибок измерения координат и наибольшего перемещения пассивных помех в атмосфере (естественных облаков, облаков искусственных пассивных помех) под действием ветра за время обзора, то есть размеры дополнительного строба весьма невелики.
Для того чтобы уменьшить влияние шумов и флюктуации пассивных помех и отраженных от целей сигналов на процесс сопровождения по заявляемому способу, требуется обеспечить надежное обнаружение отражающего объекта. Это может быть достигнуто, например, с использованием излучения двух зондирующих импульсов через короткий промежуток времени (не более 0.5 секунды). Объект считается обнаруженным, если он обнаружен при каждом из двух излучений.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - взаимное расположение по дальности цели, строба захвата или строба сопровождения и дополнительного строба для текущего и предыдущего обзоров.
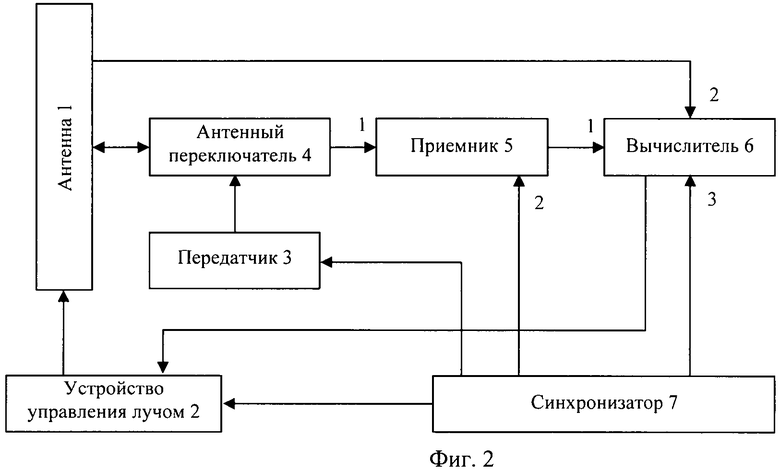
Фиг.2 - блок-схема РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.2) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выход которого соединен со входом устройства управления лучом 2, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно с синхровходами устройства управления лучом 2, передатчика 3, приемника 5 и вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: введение в теорию: пер. с англ. - М., 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М., 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М., 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М., 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М., 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М., 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М., 1984). В вычислителе 6 реализуется известный способ сопровождения траектории отражающего объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, с.285-287). В изобретении при обнаружении объекта в стробе захвата или сопровождения дополнительно осуществляется осмотр дополнительного строба, и в вычислителе 6 реализуется принятие решения об обнаружении цели в стробе по следующему правилу. Если в дополнительном стробе объект не обнаружен, то считают, что в стробе захвата или сопровождения обнаружена цель, и проводят дальнейшие операции соответственно по захвату или сопровождению ее траектории, если в дополнительном стробе объект обнаружен, то считают, что в стробе захвата или сопровождения обнаружен другой объект, и проводят операции по захвату его траектории, а сопровождение траектории цели, если оно осуществлялось на предыдущих обзорах, продолжают, фиксируя в данном стробе сопровождения пропуск в ее обнаружении.
Синхронизатор 7 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
Работа РЛС, реализующей заявляемый способ, происходит следующим образом.
На текущем обзоре по команде от синхронизатора 7 по информации, поступающей из вычислителя 6, в устройстве управления лучом 2 для каждого положения луча рассчитывается распределение состояний фазовращателей в полотне антенны 1. В результате луч антенны последовательно устанавливается в положениях зоны обзора и сформированные передатчиком 3 высокочастотные зондирующие сигналы через антенный переключатель 4 подаются в антенну 1 и излучаются. Информацией, поступающей из вычислителя 6, при этом являются координаты положений луча при осмотре зоны обзора, стробов захвата, стробов сопровождения, дополнительных стробов. Указанные координаты рассчитываются в вычислителе 6 на предыдущем обзоре по результатам обнаружения отражающих объектов в зоне обзора РЛС, в стробах захвата, стробах сопровождения.
Отраженные сигналы принимаются антенной 1, через антенный переключатель 4 поступают в приемник 5, где преобразуются на видеочастоту, фильтруются от помех, сравниваются с порогом обнаружения, в результате чего принимается решение об обнаружении объектов. Координаты объектов, обнаруженных в зоне обзора РЛС, стробах захвата и сопровождения, а также в дополнительных стробах, подаются в вычислитель 6, где принимается решение об обнаружении целей в стробах захвата и сопровождения. Решение принимается следующим образом. Если в дополнительном стробе объект не обнаружен, то считают, что в стробе захвата или сопровождения обнаружена цель, если в дополнительном стробе объект обнаружен, то считают, что в стробе захвата или сопровождения обнаружен объект, не являющийся сопровождаемой целью (источник пассивных помех или другая цель). В случае, когда принято решение о том, что в стробе захвата или сопровождения обнаружена цель, то в вычислителе 6 выполняются дальнейшие операции по сопровождению цели. Если принято решение, что в указанных стробах обнаружен объект, не являющийся сопровождаемой целью, то выполняются операции по захвату траектории этого объекта. Операции по сопровождаемой ранее траектории продолжаются, но фиксируется пропуск ее обнаружения в данном стробе.
Таким образом достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2488136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ СКОПЛЕНИЙ ОБНАРУЖЕННЫХ СИГНАЛОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536182C2 |
| СПОСОБ ОБЗОРА ЗОНЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2408028C1 |
Заявляемое техническое решение относится к области радиолокации, в частности к области сопровождения траектории цели в обзорных радиолокационных станциях (РЛС). Достигаемым техническим результатом является уменьшение количества ложных траекторий при сопровождении траекторий целей в условиях пассивных помех. При принятии на текущем обзоре решения об обнаружении цели в стробе захвата или сопровождения при обнаружении объекта в стробе захвата или сопровождения дополнительно осматривают область зоны обзора РЛС, в которой отражающий объект был обнаружен на предыдущем обзоре, для чего формируют дополнительный строб. Если в дополнительном стробе объект не обнаружен, то считают, что в стробе захвата или сопровождения обнаружена цель, и проводят дальнейшие операции соответственно по захвату или сопровождению ее траектории. Если в дополнительном стробе объект обнаружен, то считают, что в стробе захвата или сопровождения обнаружен другой объект, и проводят операции по захвату его траектории. Сопровождение траектории цели, если оно осуществлялось на предыдущих обзорах, продолжают, фиксируя в данном стробе сопровождения пропуск в ее обнаружении. 2 ил.
Способ сопровождения траектории цели, включающий обнаружение в зоне обзора радиолокационной станции (РЛС) отражающего объекта, представляющего собой цель или источник пассивных помех, формирование на следующем обзоре вокруг обнаруженного объекта строба захвата траектории, принятие решения об обнаружении цели в стробе захвата, экстраполяцию параметров траектории цели, формирование на каждом обзоре строба сопровождения, принятие решения об обнаружении цели в стробе сопровождения, фиксацию пропуска в обнаружении цели в стробе сопровождения для проверки критерия сброса траектории цели с сопровождения, отличающийся тем, что для принятия на текущем обзоре упомянутого решения об обнаружении цели в стробе захвата или сопровождения дополнительно осматривают область зоны обзора РЛС, в которой объект был обнаружен на предыдущем обзоре, для чего при обнаружении объекта в стробе захвата или сопровождения на текущем обзоре формируют дополнительный строб, размеры которого определяют исходя из ошибок измерения координат объекта и наибольшего перемещения источника пассивных помех под действием ветра за период обзора, при этом если в дополнительном стробе объект не обнаружен, то считают, что в стробе захвата или сопровождения обнаружена цель, и проводят дальнейшие операции соответственно по захвату или сопровождению ее траектории, если в дополнительном стробе объект обнаружен, то считают, что в стробе захвата или сопровождения обнаружен другой объект, и проводят операции по захвату его траектории, а сопровождение траектории цели, если оно осуществлялось на предыдущих обзорах, продолжают, фиксируя в сформированном на текущем обзоре стробе сопровождения пропуск в ее обнаружении.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| US 3855595 А, 17.12.1974 | |||
| US 6147638 А, 14.11.2000 | |||
| US 20050264438 А1, 01.12.2005 | |||
| Клапан | 1990 |
|
SU1789814A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ СИЛЬФОНОВ | 0 |
|
SU323688A1 |
| Способ определения количества золы в золоцементном материале | 1983 |
|
SU1158927A1 |

