Заявляемое техническое решение относится к области радиолокации, в частности, к области сопровождения траектории цели в обзорных радиолокационных станциях (РЛС) с электронным управлением лучом.
Известен способ сопровождения траектории цели в обзорной радиолокационной станции, включающий обнаружение цели при регулярном обзоре заданной зоны, обнаружение цели в стробе захвата траектории, установленном через период времени, равный периоду регулярного обзора, вычисление скорости цели, экстраполяцию координат цели, подтверждение обнаружения траектории цели (заданное количество обнаружений цели в стробах подтверждения обнаружения траектории из заданного количества обнаружений подряд), проверку сброса траектории цели с сопровождения (заданное количество пропусков цели подряд) (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. - М., 1993, с. 25-30).
Недостатками известного способа являются значительное время между обнаружением цели и обнаружением траектории цели вследствие большого периода обзора, характерного для обзорных РЛС, что в ряде случаев приводит к несвоевременной передаче информации о цели потребителю, а также недостаточная достоверность выдаваемой радиолокационной информации из-за большого количества ложных траекторий, формируемых вследствие значительных размеров стробов подтверждения обнаружения траектории.
Наиболее близким к заявляемому способу является способ сопровождения траектории цели в обзорной радиолокационной станции (фиг.1), включающий обнаружение цели при регулярном обзоре заданной зоны, обнаружение цели в стробе захвата траектории, установленном через период времени, равный периоду обзора, вычисление радиальной скорости цели, экстраполяцию координат цели, подтверждение обнаружения траектории цели, проверку сброса траектории цели с сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, с.198-200).
Наиболее близкий способ имеет следующие недостатки.
Известно, что из-за высоких скоростей современных воздушных целей время, которое выделяется радиолокационной станции на обнаружение траектории цели, чрезвычайно ограничено. В наиболее близком способе период обращения к цели постоянен и равен периоду регулярного обзора заданной зоны. Поскольку период регулярного обзора в обзорных РЛС довольно велик (10-15 с), то время обнаружения траектории цели также соответственно велико, что приводит к несвоевременной передаче информации о цели потребителю.
Сократить время обнаружения траектории цели за счет уменьшения периода регулярного обзора зоны в обзорных РЛС невозможно, поскольку с уменьшением периода регулярного обзора зона обзора также уменьшается, а в обзорных РЛС она, как правило, требуется достаточно большой.
Из-за большого периода регулярного обзора стробы подтверждения обнаружения траектории оказываются чрезмерно большими. В такие стробы попадает большое количество пассивных помех (отражений от земной поверхности, от метеообразований, от отражателей, намеренно устанавливаемых противником). В результате наряду с траекториями целей формируются ложные траектории, что снижает достоверность информации, выдаваемой радиолокационной станцией потребителю.
По малоскоростным целям период обращения, равный периоду регулярного обзора, оказывается слишком малым, что приводит к неоправданно большим затратам времени при обнаружении траектории.
В наиболее близком способе операции по обнаружению траектории могут проводиться и по неподвижным и малоподвижным объектам. Однако, поскольку отражения от таких объектов являются помехами, то указанные операции приводят к формированию ложных траекторий, то есть к уменьшению достоверности выдаваемой радиолокационной информации.
Решаемой задачей (техническим результатом), таким образом, является уменьшение времени обнаружения траектории цели и увеличение достоверности выдаваемой радиолокационной информации.
Указанный технический результат достигается тем, что в способе сопровождения траектории цели в обзорной радиолокационной станции с электронным управлением лучом по угловым координатам, включающем обнаружение цели при регулярном обзоре заданной зоны с периодом Tро, обнаружение цели в стробе захвата траектории, вычисление радиальной скорости цели, подтверждение обнаружения траектории цели, согласно изобретению, вычисленную радиальную скорость цели сравнивают с заранее заданными границами интервалов радиальных скоростей, по результатам сравнения цель относят к одному из двух типов: малоскоростная или скоростная, в зависимости от типа цели операцию подтверждения обнаружения траектории цели осуществляют в стробах, вид и период осмотра T которых выбирают следующим образом:
- для малоскоростной цели формируют совмещенный с регулярным обзором строб, упомянутый период вычисляют по формуле: T=k×Tро, где k - натуральное число, задаваемое исходя из допустимого времени обнаружения траектории;
- для скоростной цели формируют физический строб, который осматривают с минимальным технически возможным периодом T≤Tро, при котором цель, движущаяся с вычисленной радиальной скоростью, перемещается на расстояние, превышающее величину ошибки экстраполяции положения цели по дальности;
траектории целей, радиальные скорости которых не попадают ни в один из указанных интервалов радиальных скоростей, считают ложными.
Суть изобретения заключается в следующем (фиг.2).
Обнаруженные при регулярном обзоре цели делятся на два типа: малоскоростные (например, от 100 до 1000 км/ч) и скоростные (например, от 1000 до 3500 км/ч). Эта операция осуществляется на этапе обнаружения траектории путем сравнения измеренной радиальной скорости цели VR с заранее заданными границами двух интервалов радиальных скоростей: (VM min, VM max) - по малоскоростным целям, (VM max, VC max) - по скоростным целям.
Траектории по неподвижным и малоподвижным объектам, радиальная скорость которых менее минимальной, заданной для малоскоростных целей (VR<VM min), не формируют, поскольку такие отражения возникают от подстилающей поверхности, местных предметов, метеообразований, то есть являются помехами.
По малоскоростным целям подтверждение обнаружения траектории осуществляют в совмещенных с регулярным осмотром стробах, но осматриваемых не на каждом периоде регулярного обзора, а реже - с периодом T=k×Tро, где k - натуральное число, задаваемое исходя из допустимого времени обнаружения траектории.
Применение по малоскоростным целям стробов подтверждения обнаружения траектории, совмещенных с регулярным обзором, осматриваемых с периодом, выбираемым в зависимости от скорости цели, позволяет обеспечить допустимое время обнаружения траектории цели и при этом за счет выбора соответствующих размеров стробов достичь требуемую достоверность выдаваемой радиолокационной информации.
По скоростным целям подтверждение обнаружения траектории осуществляют в так называемых «быстрых» физических (независимых от регулярного обзора) стробах, осматриваемых с минимальным технически возможным периодом T≤Tро, при котором цель, движущаяся с вычисленной радиальной скоростью VR, перемещается на расстояние, превышающее величину ошибки экстраполяции положения цели по дальности. Осмотр «быстрого» строба может быть обеспечен с помощью электронного управления лучом антенны РЛС по обеим угловым координатам.
Применение «быстрого» физического строба позволяет: во-первых, значительно уменьшить время обнаружения траектории скоростной цели (фактически, сделать время обнаружения траектории цели минимальным); во-вторых, значительно увеличить точность экстраполяции (поскольку существенно уменьшается интервал экстраполяции параметров цели), а значит, уменьшить размеры стробов подтверждения обнаружения траектории цели и тем самым увеличить достоверность радиолокационной информации.
Траекторию объекта, радиальная скорость которого превышает заданную максимальную для скоростной цели (VR>VC max), считают ложной и исключают из дальнейшей обработки, поскольку такие нереальные траектории, как правило, формируются за счет отражений от разного рода пассивных помех.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - иллюстрация обнаружения траектории цели наиболее близким способом.
Фиг.2 - иллюстрация обнаружения траектории скоростной цели заявляемым способом.
Фиг.3 - блок-схема РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.3) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, первый выход которого соединен с первым входом устройства управления лучом 2, а второй выход предназначен для выдачи радиолокационной информации потребителю, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно с синхровходами устройства управления лучом 2, передатчика 3, приемника 5 и вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М., 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - фазированная антенная решетка (ФАР) с двумерным электронным сканированием (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М., 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении пространства (Справочник по радиолокации. Под ред. М. Сколника, т.2. М., 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. М., 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. М., 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. М., 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984). В вычислителе 6 реализуются операции обнаружения траектории цели, ее сопровождения и сброса (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.285-287).
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
РЛС, реализующая заявляемый способ (фиг.3), работает следующим образом.
На текущем периоде регулярного обзора по командам синхронизатора 7 в устройстве управления лучом 2 осуществляется расчет распределения состояний фазовращателей в полотне антенны 1, и луч антенны 1 в соответствии с заданной программой обзора последовательно устанавливается в положения зоны регулярного обзора.
В каждом положении луча зоны регулярного обзора с помощью передатчика 3 формируется зондирующий сигнал, который через антенный переключатель 4 поступает в антенну 1 и излучается. Отраженный сигнал принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где фильтруется, сравнивается с порогом обнаружения. Обнаруженный сигнал подается в вычислитель 6, где вычисляются и запоминаются координаты обнаруженной цели.
В вычислителе 6 вокруг обнаруженной при регулярном обзоре цели рассчитываются границы строба захвата траектории. При этом размеры строба устанавливаются исходя из максимальной скорости цели среди целей, заданных для РЛС.
Сигналы, пропорциональные границам строба захвата траектории, подаются на вход устройства управления лучом 2, с помощью которого луч перемещается в пределах указанных границ и по командам синхронизатора 7 излучаются зондирующие сигналы и принимаются отраженные сигналы. Обнаруженный в стробе захвата траектории сигнал с выхода приемника 5 поступает в вычислитель 6, где вычисляются и запоминаются координаты цели, обнаруженной в стробе. Исходя из дальности цели, обнаруженной при регулярном обзоре, и дальности этой цели в стробе захвата траектории, в вычислителе 6 вычисляется радиальная скорость цели VR.
В вычислителе 6 осуществляется выбор интервала по скорости с заранее заданными хранящимися в памяти вычислителя 6 границами, в который попадает измеренная радиальная скорость цели VR, и таким образом определяется тип цели:
малоскоростная или скоростная.
В зависимости от типа цели в вычислителе 6 выбираются вид и размеры строба подтверждения обнаружения траектории и период его осмотра.
По малоскоростным целям подтверждение обнаружения траектории осуществляют в совмещенных с регулярным обзором стробах, осматриваемых с периодом Т, кратным периоду регулярного обзора, то есть T=k×Tро.
По скоростным целям подтверждение обнаружения траектории осуществляют в «быстрых» физических стробах, осматриваемых с минимальным технически возможным периодом T≤Tро, при котором цель, движущаяся с вычисленной радиальной скоростью VR, перемещается на расстояние, превышающее величину ошибки экстраполяции положения цели по дальности.
Цели, измеренные радиальные скорости VR которых не попадают ни в один из указанных интервалов, считаются ложными, их координаты исключаются из дальнейшей обработки.
Значения границ стробов подтверждения обнаружения траектории подаются на вход устройства управления лучом 2, и в пределах этих границ по командам синхронизатора 7 излучаются зондирующие сигналы.
Обнаруженный в стробе подтверждения обнаружения траектории сигнал с выхода приемника 5 поступает в вычислитель 6, где вычисляются и запоминаются координаты цели и проверяется критерий подтверждения обнаружения траектории. Если критерий подтверждения обнаружения траектории выполняется, то траектория считается обнаруженной и передается на этап сопровождения. Если же проверка указанного критерия еще не завершена, то в вычислителе 6 рассчитываются новые экстраполированные координаты цели и границы строба, с помощью устройства управления лучом 2 в эти направления излучаются зондирующие сигналы и операция подтверждения обнаружения траектории цели продолжается. Если критерий подтверждения обнаружения траектории не выполняется, то обнаружение траектории прекращается.
Информация об обнаруженных траекториях целей со второго выхода вычислителя 6 выдается потребителю РЛИ.
Применение по малоскоростным целям стробов подтверждения траектории, совмещенных с регулярным обзором, осматриваемых с периодом, выбираемым в зависимости от скорости цели, позволяет обеспечить допустимое время обнаружения траектории цели и при этом за счет выбора соответствующих размеров стробов обеспечить достаточную достоверность выдаваемой радиолокационной информации.
Применение по скоростным целям «быстрых» физических стробов подтверждения траектории позволяет значительно уменьшить время обнаружения траекторий таких целей, а также повысить точность экстраполяции цели и за счет этого уменьшить размеры стробов и увеличить достоверность радиолокационной информации.
Таким образом достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |


Изобретение относится к области радиолокации, в частности, к области сопровождения траектории цели в обзорных радиолокационных станциях. Достигаемый технический результат - уменьшение времени обнаружения траектории цели и увеличение достоверности выдаваемой радиолокационной информации. Указанный результат достигается за счет того, что обнаруженную цель по вычисленной радиальной скорости относят к одному из двух типов: малоскоростная или скоростная, при этом для малоскоростной цели подтверждение обнаружения траектории осуществляют в совмещенных с регулярным обзором стробах, которые осматривают с периодом, кратным периоду регулярного обзора, для высокоскоростной цели подтверждение обнаружения траектории осуществляют в физических стробах, осматриваемых с минимальным технически возможным периодом, при котором цель, движущаяся с вычисленной радиальной скоростью, перемещается на расстояние, превышающее величину ошибки экстраполяции положения цели по дальности. 3 ил.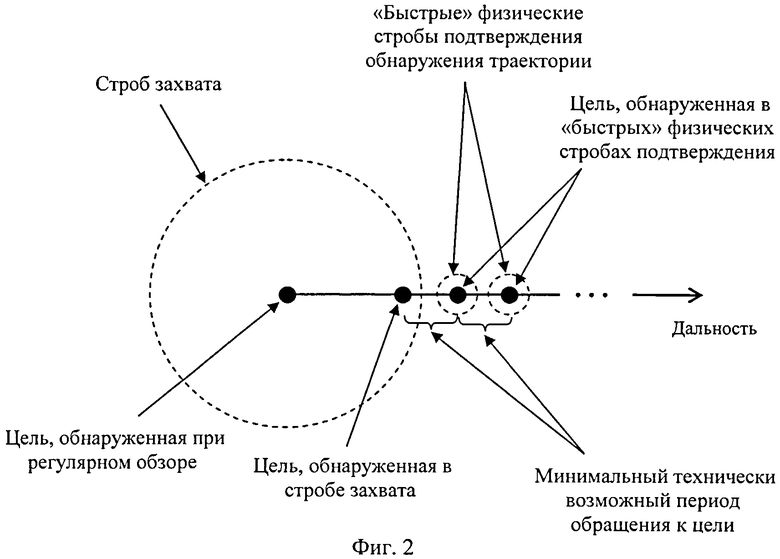
Способ сопровождения траектории цели в обзорной радиолокационной станции с электронным управлением лучом по угловым координатам, включающий обнаружение цели при регулярном обзоре заданной зоны с периодом Tро, обнаружение цели в стробе захвата траектории, вычисление радиальной скорости цели, подтверждение обнаружения траектории цели, отличающийся тем, что вычисленную радиальную скорость цели сравнивают с заранее заданными границами интервалов радиальных скоростей, по результатам сравнения цель относят к одному из двух типов: малоскоростная или скоростная, в зависимости от типа цели операцию подтверждения обнаружения траектории цели осуществляют в стробах, вид и период осмотра Т которых выбирают следующим образом:
- для малоскоростной цели формируют совмещенный с регулярным обзором строб, упомянутый период вычисляют по формуле: T=k×Tро, где k - натуральное число, задаваемое исходя из допустимого времени обнаружения траектории;
- для скоростной цели формируют физический строб, который осматривают с минимальным технически возможным периодом T≤Tро, при котором цель, движущаяся с вычисленной радиальной скоростью, перемещается на расстояние, превышающее величину ошибки экстраполяции положения цели по дальности;
траектории целей, радиальные скорости которых не попадают ни в один из указанных интервалов радиальных скоростей, считают ложными.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| Москва, Советское радио, 1974, с.198-200 | |||
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| US 6121915 А, 19.09.2000 | |||
| US 6147638 A, 14.11.2000 | |||
| EP 588687 A1, 23.03.1994 | |||
| WO 2003083511 A1, 09.10.2003 | |||

