Изобретение относится к области гидродинамики и предназначено для создания одновременного движения по меньшей мере двух плавучих объектов по поверхности жидкости по предварительно заданным траекториям. Изобретение может быть использовано в научных целях, в частности для исследования гидродинамических процессов, протекающих при движении группы плавучих объектов, обладающих гидродинамическим подобием с полноразмерными объектами, по поверхности воды, процессов обтекания жидкостью движущегося плавучего объекта при возмущении жидкой среды другими движущимися по поверхности объектами и течениями, а также в киноиндустрии, для студийной съемки сцен, подразумевающих групповое движение плавучих объектов, в том числе парусных кораблей, без необходимости прибегать к натурным съемкам и без необходимости изготовления полноразмерных макетов.
УРОВЕНЬ ТЕХНИКИ
Известны многочисленные дистанционно управляемые игрушки, в том числе и для игры на воде, которые с помощью пульта управления меняют свою траекторию движения. Однако это возможно на небольших расстояниях и только с одним объектом. Кроме того, возможны радиопомехи, не позволяющие точно управлять макетом объекта.
Из авторского свидетельства СССР №1000817 известно устройство для исследования гидродинамики моделей судов, содержащее емкость, заполненную жидкой средой и буксировочную тележку.
Недостаток известного технического решения, препятствующий достижению нижеупомянутого технического результата, состоит в том, что оно не обеспечивает:
- свободное (от влияний обусловленных механической связью модели с движителем) движение модели, что не позволяет изучать поведение корпуса судов при волнении;
- движение моделей по сложным траекториям, отличным от прямой линии;
- совместное движение нескольких моделей по сложным траекториям (что не позволяет изучать, например, влияние турбулентности следа одного судна на траекторию другого или влияние эффекта Бернулли на взаимное движение судов).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей полезной модели является создание стенда для обеспечения контролируемого движения по меньшей мере двух плавучих объектов по предварительно заданным траекториям в ограниченном пространстве, в котором плавучие объекты не содержат в себе двигателя, приводящего их в поступательное движение относительно жидкости, и приводятся в движение бесконтактным способом, и обеспечивается возможность корректировки траектории плавучих объектов в реальном времени.
Отсутствие двигателя позволяет изучать характер обтекания объекта потоками жидкой среды, отдельно от возмущений потока, обусловленных взаимодействием движителя (винта, турбины, водоструйного двигателя) с жидкой средой, что может быть необходимо для оптимизации формы корпуса объекта или для изучения обтекания корпуса быстроходных парусных яхт в жидкой среде.
Отсутствие механических связей между плавучими объектами и двигателями, приводящими их в движение не только позволяет применять стенд для создания реалистичных инсценировок морских эскадр в движении, не нуждающихся в дополнительной компьютерной обработке для удаления с изображений элементов двигателя, но и чрезвычайно необходимо в научных целях для моделирования свободного движения плавучих объектов на поверхности жидкости, не ограниченного механическими связями с двигателем, например для моделирования поведения корпуса судов при сильном волнении или под воздействием ветра.
Технический результат, обеспечиваемый при использовании изобретения, состоит в создании стенда, обеспечивающего одновременное движение сразу нескольких бездвижительных плавучих объектов по заданным траекториям бесконтактным способом.
Вышеуказанная задача решена благодаря тому, что предлагаемый стенд для создания движения группы по меньшей мере двух плавучих объектов в ограниченном пространстве по предварительно заданным траекториям, в котором упомянутые объекты представляют собой продольно вытянутые тела с положительной плавучестью, в передних и задних частях которых установлен магнитный элемент, а на выступающей из жидкости части установлен маркер, содержит в себе:
емкость для жидкой среды, имеющая дно и борта, возвышающиеся над уровнем дна, выполненная таким образом, чтобы обеспечить достаточный уровень жидкости для движения упомянутых объектов по упомянутым траекториям с учетом осадки указанных объектов,
управляемые электромагниты, установленные в предварительно заданных зонах снизу от дна упомянутой емкости,
контроллер, подключенный к упомянутым электромагнитам, выполненный с возможностью включения и/или изменения силы и/или полярности электрического тока в обмотке каждого из упомянутых электромагнитов,
видеокамеры, установленные над упомянутой емкостью таким образом, чтобы их поле зрения покрывало всю поверхность упомянутой емкости, выполненные с возможностью считывания упомянутого маркера,
средства управления, подключенные к упомянутым видеокамерам, выполненные с возможностью приема изображений с упомянутых видеокамер, определения местоположения упомянутых маркеров на поверхности упомянутой емкости по изображениям, полученным с упомянутых видеокамер, и изменения магнитного поля на поверхности упомянутой емкости посредством упомянутого контроллера таким образом, чтобы после заполнения емкости жидкостью обеспечить движение маркеров упомянутых объектов по предварительно заданным траекториям с предварительно заданными скоростями.
Далее вышеупомянутое устройство, охарактеризованное в общих категориях, поясняется на примере некоторых особенно предпочтительных форм выполнения, обеспечивающих получение дополнительных преимуществ.
Вышеупомянутый магнитный элемент может представлять собой, в частности, постоянный магнит или электромагнит.
Полюса вышеупомянутого магнита могут быть соориентированы вдоль продольной оси вышеупомянутого объекта.
Вышеупомянутый магнитный элемент также может представлять собой, в частности, деталь, выполненную из ферромагнитного или ферримагнитного материала.
Вышеупомянутый объект в одной из частных форм воплощения может быть снабжен по меньшей мере двумя упомянутыми магнитными элементами.
Вышеупомянутый маркер может представлять собой, в частности, видимый в оптическом диапазоне частот элемент, местоположение которого на фоне других объектов может быть легко установлено посредством известных алгоритмов машинной обработки изображений. Такой элемент может выделяться на изображении с видеокамер, например, своим цветом или сочетанием и толщиной линий (аналогично штрихкоду).
Вышеупомянутый маркер также может представлять собой инфракрасный светодиод, а вышеупомянутые видеокамеры выполнены с возможностью считывания инфракрасного излучения упомянутого светодиода.
Вышеупомянутые светодиоды, установленные на разных вышеупомянутых объектах или на одном вышеупомянутом объекте, в одной из частных форм воплощения могут иметь излучение, различающееся по частоте и/или длительности импульсов таким образом, что вышеупомянутое средство управления имеет возможность отличать все светодиоды друг от друга.
В одной из частных форм воплощения каждый из вышеупомянутых объектов может быть снабжен по меньшей мере одним дополнительным маркером, размещенным на расстоянии от вышеупомянутого маркера. Это, в частности, упрощает определение ориентации вышеупомянутого объекта. Разумеется, ориентация может быть установлена и при использовании одного маркера, однако такой маркер должен иметь большие габариты, чтобы его детали, указывающие на ориентацию в пространстве, могли легко распознаваться на изображениях с упомянутых видеокамер.
В еще одной частной форме воплощения количество камер больше или равно количеству маркеров. Предпочтительным является стенд, в котором поле зрения каждой камеры охватывает всю поверхность вышеупомянутой емкости, при этом каждому маркеру, установленному на вышеупомянутых объектах, соответствует своя собственная видеокамера.
В другой частной форме выполнения вышеупомянутый объект дополнительно снабжен сенсором, выполненным с возможностью определения силы и/или направления магнитного поля и передачи информации о силе и/или направлении магнитного поля вышеупомянутым средствам управления по беспроводному каналу передачи данных. Это позволяет повысить точность и упростить управление объектом за счет замены расчетной величины силы, создаваемой в заданной зоне поверхности емкости, полученной исходя из известного местоположения вышеупомянутых электромагнитов и известной величины тока, подаваемого на их обмотки, реальным значением силы магнитного поля, которое может отличаться от расчетных значений под влиянием множества факторов, например, в случае, если объект совершает колебания под воздействием волн на поверхности жидкости.
Вышеупомянутый контроллер в одной из частных форм воплощения может быть выполнен с возможностью изменения направления линий магнитного поля, создаваемого упомянутыми электромагнитами. Когда электромагниты под вышеупомянутой емкостью размещены в узлах сети, а линии поля ориентированы преимущественно вдоль поверхности жидкости (а не по нормали к ней), то управляя направлением и силой тока в обмотках электромагнитов всей сети можно создавать такую карту распределения магнитных полей, что на магнитный элемент в виде магнита с линиями поля, ориентированными по существу вдоль поверхности жидкости, будут действовать стабилизирующие курс силы, препятствующие сходу объекта с заданной траектории, при этом движении объекта по заданной траектории обеспечивается усилением соответствующим образом направленного магнитного поля спереди от магнитного элемента.
Вышеупомянутая емкость в одной из частных форм воплощения может быть выполнена из прозрачного материала.
Вышеупомянутые электромагниты в одной из частных форм воплощения могут быть расположены в узлах воображаемой сети, образованной треугольниками, четырехугольниками или шестиугольниками.
В одной из частных форм воплощения в каждом узле воображаемой сети, образованной треугольниками, четырехугольниками или шестиугольниками, может быть установлено два вышеупомянутых электромагнита, имеющие по существу взаимно перпендикулярные направления создаваемых ими магнитных полей.
В одной из предпочтительных форм воплощения вышеупомянутый объект может быть дополнительно снабжен по меньшей мере одним механическим гироскопом для стабилизации курса.
Настоящее изобретение может предназначено для создания одновременного движения по меньшей мере двух плавучих объектов по поверхности жидкости по предварительно заданным траекториям. Изобретение может применяться в научных целях, в частности, для исследования гидродинамических процессов, протекающих при движении группы плавучих объектов, обладающих гидродинамическим подобием с полноразмерными объектами, по поверхности воды, процессов обтекания жидкостью движущегося плавучего объекта при возмущении жидкой среды другими движущимися по поверхности объектами и течениями, а также в киноиндустрии, для студийной съемки сцен, подразумевающих групповое движение плавучих объектов, в том числе парусных кораблей, без необходимости прибегать к натурным съемкам и без необходимости изготовления полноразмерных макетов.
Необходимо понимать, что в настоящем тексте стенд охарактеризован только такими признаками, которые достаточны для решения поставленной задачи, реализации назначения и достижения выбранного технического результата; специального упоминания всех без исключения признаков и утилитарных характеристик стенда не требуется, если специалистам должно быть известно, что изделия того же рода обладают такими признаками и утилитарными характеристиками и без них не реализуется основное назначение; тем более не требуется ограничивать обобщенные признаки какими-либо конкретными вариантами, если таковые должны быть известны специалистам и (или) могут быть подобраны по известным правилам.
Конструкция и использование стенда наглядно иллюстрируется прилагаемой фигурой на примере частной формы воплощения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖА
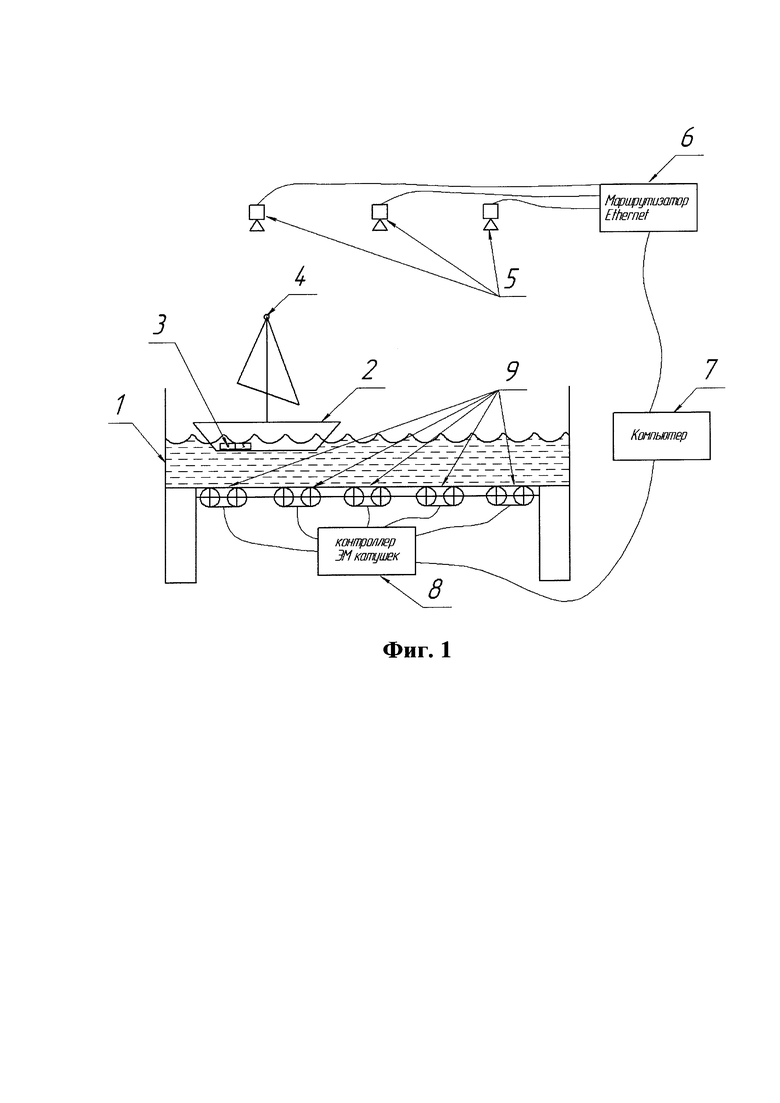
На фигуре представлено схематичное изображение одного из вариантов стенда по изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Рассмотрим устройство и работу стенда на примере одной из форм воплощения, предназначенной для моделирования движения таких плавучих объектов, как макеты кораблей в ограниченном пространстве. Такое моделирование может быть полезно для изучения сил (например, эффекта Бернулли), воздействующих на движение кораблей при их проходе в непосредственной близости друг от друга разными курсами, а также для исследования обтекания корпусов кораблей при их групповом движении, в том числе в условиях волнения.
Стенд, изображенный на фигуре, предназначен для создания движения группы по меньшей мере двух плавучих объектов 2 в ограниченном пространстве по предварительно заданным траекториям.
Упомянутые объекты 2 представляют собой продольно вытянутые тела с положительной плавучестью, в виде макетов кораблей, в передних и задних частях которых установлен магнитный элемент 3, а именно постоянный магнит, линии которого ориентированы по существу вдоль поверхности жидкости.
На выступающей из жидкости части, а именно на мачте макетов, установлен маркер.
Стенд содержит в себе емкость 1 для жидкой среды, имеющую дно и борта, возвышающиеся над уровнем дна, при этом емкость выполнена таким образом, чтобы обеспечить достаточный уровень жидкости для движения упомянутых объектов по упомянутым траекториям с учетом осадки указанных объектов.
Стенд также содержит в себе управляемые электромагниты 9, установленные в предварительно заданных зонах снизу от дна упомянутой емкости 1.
Контроллер 8 подключен к упомянутым электромагнитам и выполнен с возможностью включения и/или изменения силы и/или полярности электрического тока в обмотке каждого из упомянутых электромагнитов 9.
Видеокамеры 5 установлены над упомянутой емкостью 1 таким образом, чтобы их поле зрения покрывало всю поверхность упомянутой емкости 1 и выполнены с возможностью считывания упомянутого маркера.
Средства управления 7 подключены к упомянутым видеокамерам 5 через Ethernet-маршрутизатор 6 и выполнены с возможностью приема изображений с упомянутых видеокамер 5, определения местоположения упомянутых маркеров 4 на поверхности упомянутой емкости 1 по изображениям, полученным с упомянутых видеокамер 5, и изменения магнитного поля на поверхности упомянутой емкости 1 посредством упомянутого контроллера 8 таким образом, чтобы после заполнения емкости жидкостью обеспечить движение маркеров 4 упомянутых объектов 2 по предварительно заданным траекториям с предварительно заданными скоростями. В качестве средств управления может быть использован компьютер общего назначения с подходящими интерфейсами для подключения видеокамер 5 и контроллера 8.
Электромагниты 8 расположены в узлах сети с шестиугольными ячейками. Размер ячеек примерно равен или несколько меньше размеров макета корабля 8. Такое заполнение плоскости позволяет выстраивать траектории макета между любыми двумя узлами нескольких сот.
Стенд работает следующим образом. Емкость 1 заполняют жидкостью до уровня примерно 150 мм и помещают макеты кораблей 2 на поверхность жидкости. Макеты кораблей приводят в одновременное движение по заданным траекториям за счет взаимодействия поля постоянных магнитов 3, находящихся в корабле 2 с магнитным полем электромагнитов 9, находящихся под дном емкости 1. При этом формируют такую силу поля электромагнитов 9 по бокам от макетов 2, которое препятствует случайным поворотам и сходам макетов 2 с заданной траектории. Местоположение макетов 2 в каждый момент времени определяют посредством распознавания маркеров 4, установленных на макетах, на изображениях, полученных с видеокамер 5 посредством компьютера 7. Распознавание маркеров осуществляется посредством программного обеспечения, принцип работы которого сходен с программным обеспечением, обеспечивающим распознавание штрихкодов или считывание позиционных меток на бланках документов, подлежащих автоматической обработке. Сведения о положении маркеров в каждый момент времени необходимы для того, чтобы обеспечить такую последовательность включения и регулирования силы тока, с помощью контроллера 8, в обмотках электромагнитов 9, которое будет обеспечивать движение макета 2 по заданной траектории и его стабилизацию по бокам.
Предпочтительно использовать в качестве маркеров инфракрасные светодиоды. Модификация камер при помощи светофильтров позволяет исключить большую часть видимого спектра света и оставить только свечение инфракрасных диодов на частоте около 920 нм, что позволит уменьшить количество ошибок распознавания маркеров.
Также для позиционирования макетов могут быть использованы камеры с источником направленного инфракрасного излучения, а в качестве маркера может быть использован катафот, способный отражать инфракрасное излучение источника.
В результате достигается точное позиционирование движущихся объектов в составе серии таких же объектов и осуществление автоматической траектории движения объектов по точно заданным координатам пути следования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации скоростей поражающих элементов для осесимметричных осколочных боеприпасов и стенд для его осуществления | 2022 |
|
RU2809643C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ СВЕТОВОГО ПОТОКА НА ОСНОВАНИИ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2744510C2 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПО ВИДЕОДАННЫМ | 2021 |
|
RU2775162C1 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ СВЕТОВОГО ПОТОКА НА ОСНОВАНИИ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2729196C1 |
| СИСТЕМЫ И СПОСОБЫ ОТСЛЕЖИВАНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЦЕЛЕВОГО ОБЪЕКТА | 2014 |
|
RU2664257C2 |
| УСТРОЙСТВО И СПОСОБ МАГНИТНОЙ ФАБРИКАЦИИ | 2019 |
|
RU2746171C2 |
| Комплекс обустройства безопасного пешеходного перехода с системой интеллектуального управления | 2023 |
|
RU2812495C1 |
| СИСТЕМА И СПОСОБ ПОИСКА ОБЪЕКТОВ ПО ТРАЕКТОРИЯМ ДВИЖЕНИЯ НА ПЛАНЕ МЕСТНОСТИ | 2018 |
|
RU2701985C1 |
Изобретение относится к области гидродинамики. Предлагается стенд для создания движения группы по меньшей мере двух плавучих объектов в ограниченном пространстве по предварительно заданным траекториям, при этом упомянутые объекты представляют собой продольно вытянутые тела с положительной плавучестью, в передних и задних частях которых установлен магнитный элемент, а на выступающей из жидкости части установлен маркер. Стенд содержит в себе: емкость для жидкой среды, имеющая дно и борта, возвышающиеся над уровнем дна, выполненная таким образом, чтобы обеспечить достаточный уровень жидкости для движения упомянутых объектов по упомянутым траекториям с учетом осадки указанных объектов, управляемые электромагниты, установленные в предварительно заданных зонах снизу от дна упомянутой емкости, контроллер, подключенный к упомянутым электромагнитам, выполненный с возможностью включения и/или изменения силы и/или полярности электрического тока в обмотке каждого из упомянутых электромагнитов, видеокамеры, установленные над упомянутой емкостью таким образом, чтобы их поле зрения покрывало всю поверхность упомянутой емкости, выполненные с возможностью считывания упомянутого маркера, средства управления, подключенные к упомянутым видеокамерам, выполненные с возможностью приема изображений с упомянутых видеокамер, определения местоположения упомянутых маркеров на поверхности упомянутой емкости по изображениям, полученным с упомянутых видеокамер, и изменения магнитного поля на поверхности упомянутой емкости посредством упомянутого контроллера таким образом, чтобы после заполнения емкости жидкостью обеспечить движение маркеров упомянутых объектов по предварительно заданным траекториям с предварительно заданными скоростями. Технический результат заключается в увеличении степени подобия между гидродинамикой моделей и реальными объектами. 12 з.п. ф-лы, 1 ил.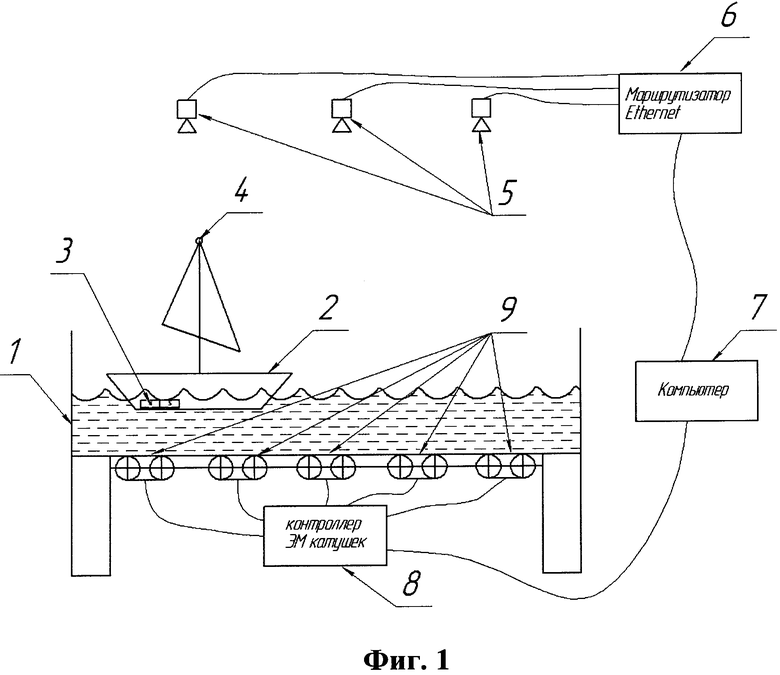
1. Стенд для создания движения группы по меньшей мере двух плавучих объектов в ограниченном пространстве по предварительно заданным траекториям, при этом упомянутые объекты представляют собой продольно вытянутые тела с положительной плавучестью, в передних и задних частях которых установлен магнитный элемент, а на выступающей из жидкости части установлен маркер, характеризующийся тем, что он содержит в себе:
емкость для жидкой среды, имеющая дно и борта, возвышающиеся над уровнем дна, выполненная таким образом, чтобы обеспечить достаточный уровень жидкости для движения упомянутых объектов по упомянутым траекториям с учетом осадки указанных объектов,
управляемые электромагниты, установленные в предварительно заданных зонах снизу от дна упомянутой емкости,
контроллер, подключенный к упомянутым электромагнитам, выполненный с возможностью включения и/или изменения силы и/или полярности электрического тока в обмотке каждого из упомянутых электромагнитов,
видеокамеры, установленные над упомянутой емкостью таким образом, чтобы их поле зрения покрывало всю поверхность упомянутой емкости, выполненные с возможностью считывания упомянутого маркера,
средства управления, подключенные к упомянутым видеокамерам, выполненные с возможностью приема изображений с упомянутых видеокамер, определения местоположения упомянутых маркеров на поверхности упомянутой емкости по изображениям, полученным с упомянутых видеокамер, и изменения магнитного поля на поверхности упомянутой емкости посредством упомянутого контроллера таким образом, чтобы после заполнения емкости жидкостью обеспечить движение маркеров упомянутых объектов по предварительно заданным траекториям с предварительно заданными скоростями.
2. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый магнитный элемент представляет собой постоянный магнит или электромагнит.
3. Стенд по п. 2, характеризующийся тем, что в нем полюса вышеупомянутого магнита сориентированы вдоль продольной оси вышеупомянутого объекта.
4. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый магнитный элемент представляет собой деталь, выполненную из ферромагнитного или ферримагнитного материала.
5. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый объект снабжен по меньшей мере двумя упомянутыми магнитными элементами.
6. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый маркер представляет собой видимый в оптическом диапазоне частот элемент, местоположение которого на фоне других объектов может быть легко установлено посредством известных алгоритмов машинной обработки изображений.
7. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый маркер представляет собой инфракрасный светодиод, а вышеупомянутые видеокамеры выполнены с возможностью считывания инфракрасного излучения упомянутого светодиода.
8. Стенд по п. 7, характеризующийся тем, что в нем вышеупомянутые светодиоды, установленные на разных вышеупомянутых объектах или на одном вышеупомянутом объекте, имеют излучение, различающееся по частоте и/или длительности импульсов таким образом, что вышеупомянутое средство управления имеет возможность отличать все светодиоды друг от друга.
9. Стенд по п. 1, характеризующийся тем, что в нем каждый из вышеупомянутых объектов снабжен по меньшей мере одним дополнительным маркером, размещенным на расстоянии от вышеупомянутого маркера.
10. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутый контроллер выполнен с возможностью изменения силы магнитного поля, создаваемого упомянутыми электромагнитами.
11. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутая емкость выполнена из прозрачного материала.
12. Стенд по п. 1, характеризующийся тем, что в нем вышеупомянутые электромагниты расположены в узлах воображаемой сети, образованной треугольниками, четырехугольниками или шестиугольниками.
13. Стенд по п. 1, характеризующийся тем, что в нем в каждом узле воображаемой сети, образованной треугольниками, четырехугольниками или шестиугольниками, установлено два вышеупомянутых электромагнита.
| Опытовый бассейн для гидродинамических испытаний моделей судов | 1981 |
|
SU1000817A1 |
| Установка для буксировки модели судна | 1987 |
|
SU1440787A1 |
| ГИДРОКАНАЛ КАРКИЩЕНКО С ИСКУССТВЕННЫМ ТЕЧЕНИЕМ ДЛЯ ИССЛЕДОВАНИЯ КИНЕЗОДИНАМИКИ ПОДОПЫТНЫХ ЖИВОТНЫХ | 2012 |
|
RU2518096C1 |
| Тренажер пловцов | 1978 |
|
SU842926A1 |

