Изобретение относится к устройствам транспортных средств, и наиболее эффективно может быть использовано в конструкции электромобильных и роботизированных транспортных шасси, в инвалидных колясках с электроприводом.
Известно устройство транспортного средства, оборудованное сферическим движителем. (Шаробот. [Электронный ресурс]. // Интернет энциклопедия «Википедия» - Режим доступа: https://ru.wikipedia.org/wiki/%D0%A8%D0%B0%D1%80%D0%BE%D0%B1%D0%BE%D1%82 - (дата обращения 25.08.2023)). Данное устройство содержит сферический движитель в виде шара, на который передается крутящий момент от сервоприводов, оси вращения которых расположены в одной плоскости перпендикулярно друг другу (принцип функционирования обратный принципу функционирования шариковой компьютерной мыши). Для поддержания равновесия данная платформа использует систему стабилизации, которая регистрирует отклонения от вертикальной оси с помощью специальных устройств на основе гироскопов и корректирует положение с помощью электроприводов. На случай, когда робот никуда не движется, у него есть специальный упор в виде трех выдвижных ног.
Недостатком данного устройства является сложность системы удержания динамического равновесия платформы. Кроме того, платформа может двигаться в любом направлении, но не имеет возможности поворота корпуса вокруг своей оси. Устойчиво данное устройство может стоять на ненаклонной поверхности, на наклонной поверхности оно будет сползать в низ.
Известно также устройство транспортного средства, содержащее сферический движитель. (Lego Car with Ball Wheels: Does it work? [Видео ресурс, 1 минута 30 секунда]. // Видеохостинг «YouTube» - Режим доступа: - https://www.youtube.com/watch?v=5p-B51FKEps - (дата обращения 25.08.2023)). Данное устройство содержит один ведущий шар, который приводится в движение двумя электроприводами, оси вращения которых находятся в одной плоскости и расположены перпендикулярно друг к другу. В состав устройства входит также опорная колесная пара.
Недостатком данного устройства является то, что оно осуществляет повороты по большим радиусам. Данная транспортная платформа не может разворачиваться на месте, ездить под углом к курсовому положению, т.е. не позволяет использовать преимущества сферического движителя в полной мере.
Из известных устройств, построенных на использовании сферических движителей, наиболее близкой по технической сущности является транспортное средство, содержащая четыре шароколеса. (Lego Car with Ball Wheels: Does it work? [Видео ресурс, 5 минута 30 секунда]. // Видеохостинг «YouTube» - Режим доступа: - https://www.youTube.com/watch?v-5p-B51FKEps - (дата обращения 25.08.2023)). Все шары данного устройства являются ведущими. Каждый шар приводится в движение колесами от двух приводов, оси вращения который расположены перпендикулярно друг другу, а оси вращения всех колес лежат в одной плоскости. Изменением направления и величины вращения колес, обеспечивается возможность каждому шару двигаться в любом направлении, что, в целом, позволяет платформе также двигаться в любом направлении, под любым углом к курсовому направлению кузова, вращаться на месте относительно собственного центра. Шары платформы удерживаются в колесных узлах с шариковыми или роликовыми опорами. Приводами, обеспечивающими крутящие моменты сферическим движителям (шарам) транспортной платформы, управляет компьютер, обеспечивающий требуемую траекторию движения платформы.
Недостатком данного устройства является его конструкционная сложность раздачи и управления крутящими моментами электроприводов, снижающая функциональную надежность.
Техническая проблема заключается в расширении арсенала устройств транспортных средств со сферическим движителем за счет создания транспортного средства с одним ведущим сферическим движителем, обладающей всей полнотой маневров доступных транспортным средствам со сферическим движителем при более простом конструктивном решении, в том числе и за счет использования новых принципов осуществления маневра.
Техническим результатом изобретения являются повышенная эксплуатационная надежность транспортного средства и дублирование осуществления поворотных маневров.
Поставленная проблема решается за счет того, что создается устройство транспортного средства со сферическими движителями, включающее в себя бортовой аккумулятор, орган управления, бортовой компьютер, четыре расположенные в одной плоскости сферических движителя, установленные в колесных узлах с шариковыми или роликовыми опорами, три электропривода, причем один сферический движитель имеет два электропривода, оси вращения которых перпендикулярны друг другу и лежат в плоскости сферических движителей, приводы сферического движителя управляются бортовым компьютером, отличающееся тем, что три колесных узла со сферическими движителями расположены в вершинах треугольника, в центре описанной окружности которого расположен колесный узел со сферическим движителем с двумя электроприводами, на все сферические движители установлены тормозные блоки, на сферический движитель, расположенный в вершине треугольника, установлен электропривод, ось вращения которого лежит в плоскости расположения сферических движителей параллельно линии проходящей через центры ведущего сферического движителя и движителя, на который установлен данный электропривод, колесные узлы двух других сферических движителя без электроприводов, расположенных в вершинах треугольника, установлены на пружинную подвеску.
Проведенный заявителем анализ техники, включая поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволяют установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Сущность изобретения поясняется следующими чертежами, на которых изображено:
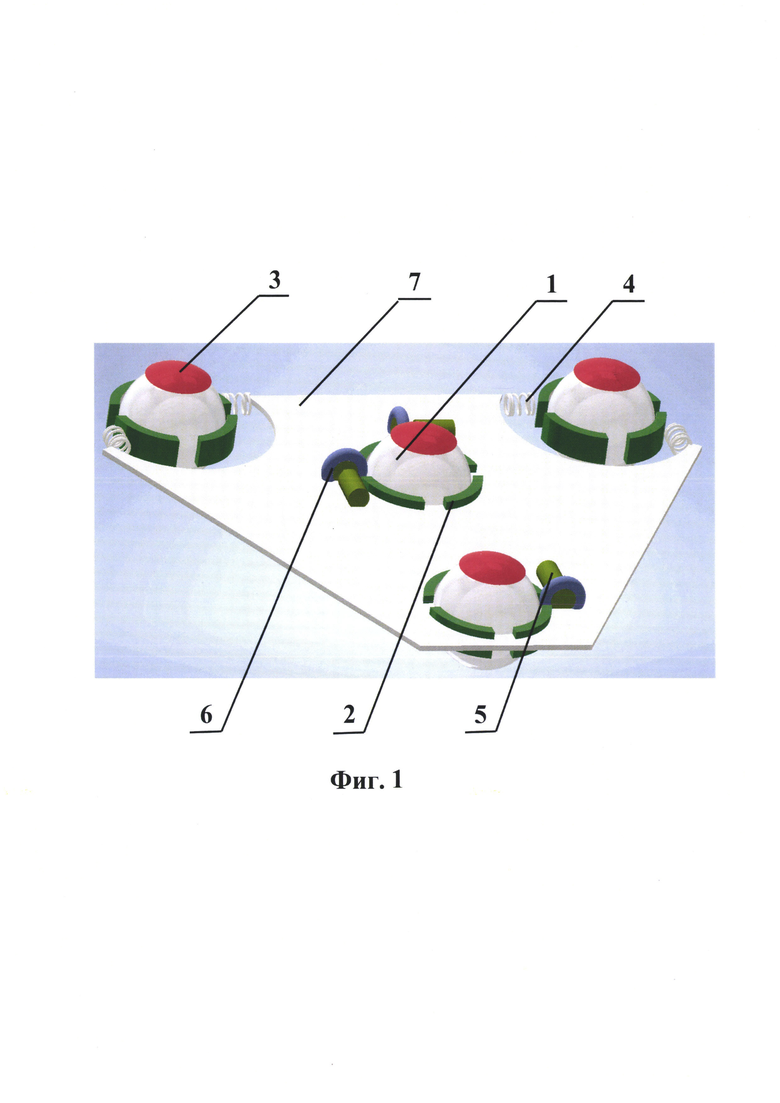
Фиг. 1 изображает структурный вид транспортной платформы в аксонометрии.
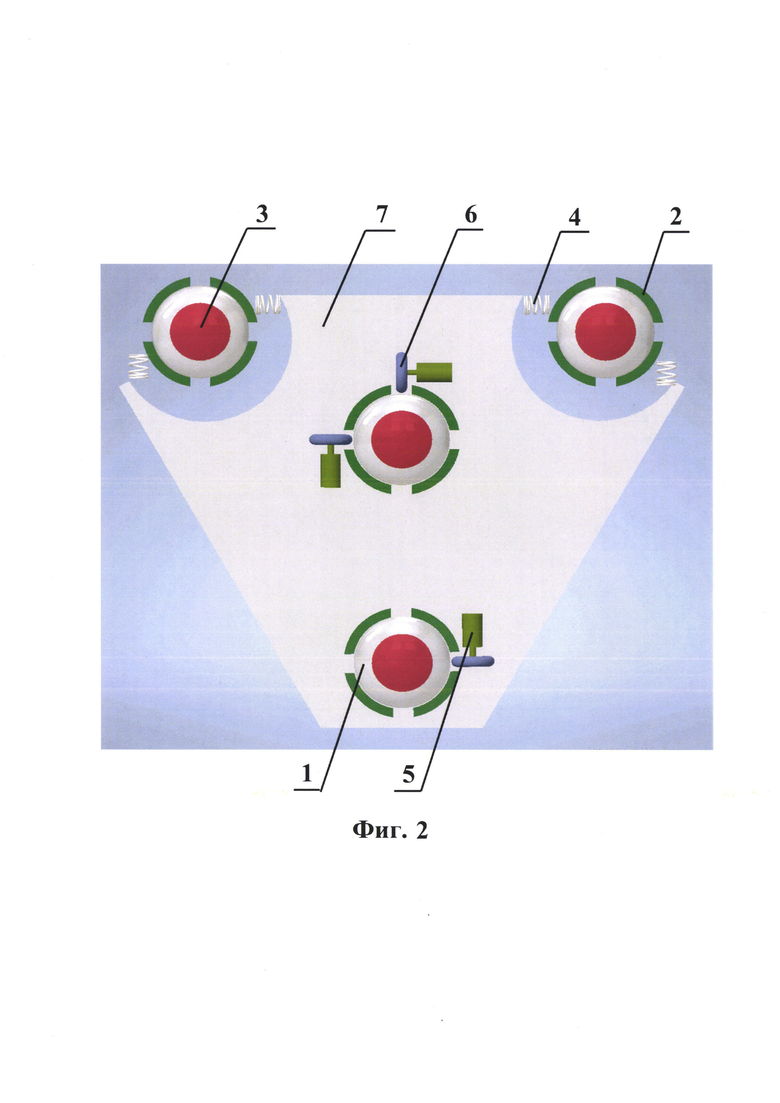
Фиг. 2 изображает структурный вид транспортной платформы сверху.
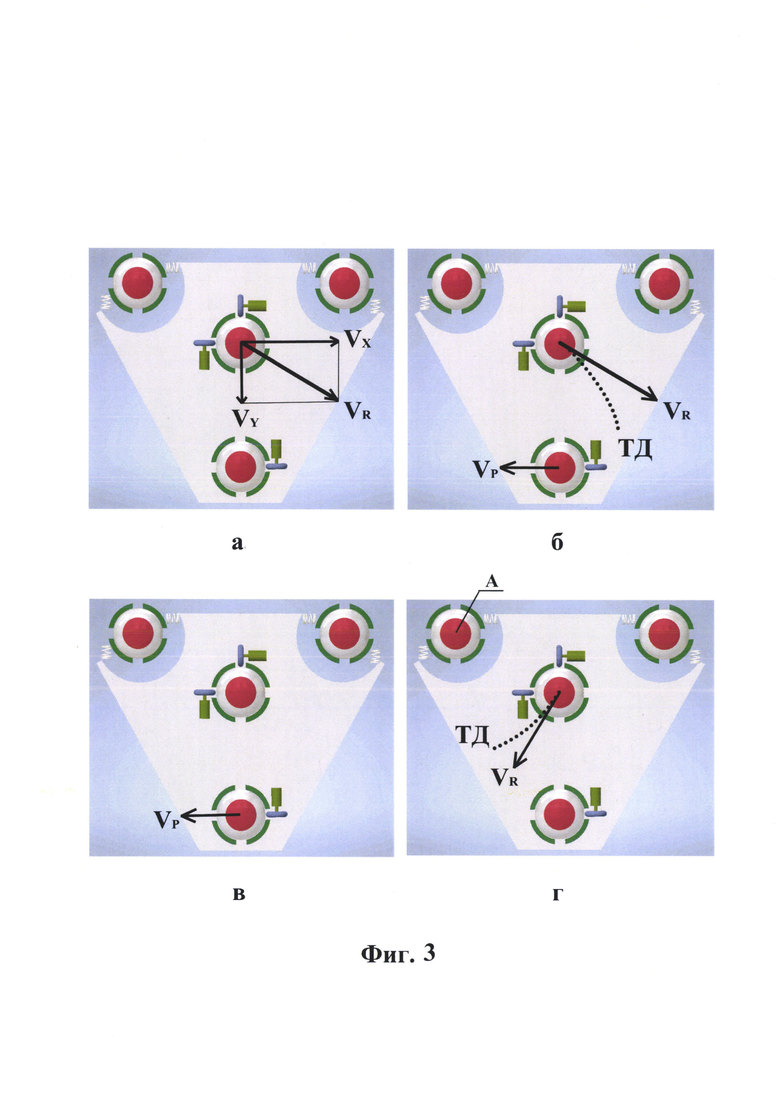
Фиг. 3 изображает варианты движения транспортной платформы.
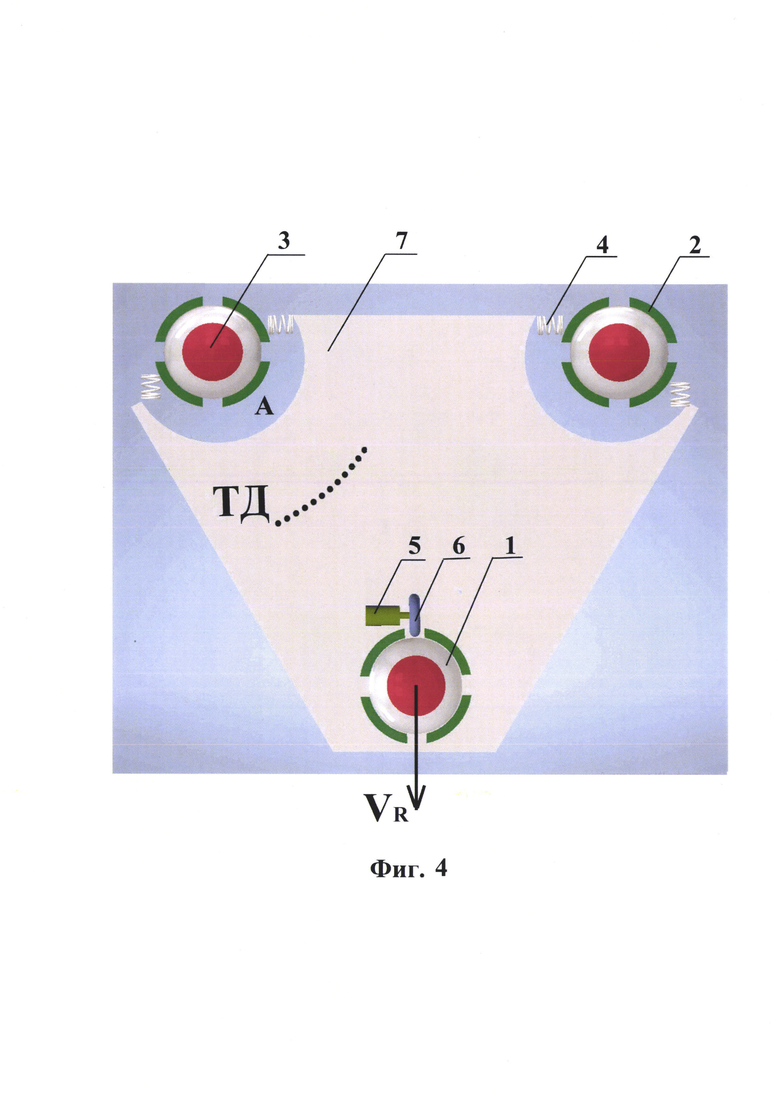
Фиг. 4 изображает структурный вид транспортной платформы с одним электроприводом сверху.
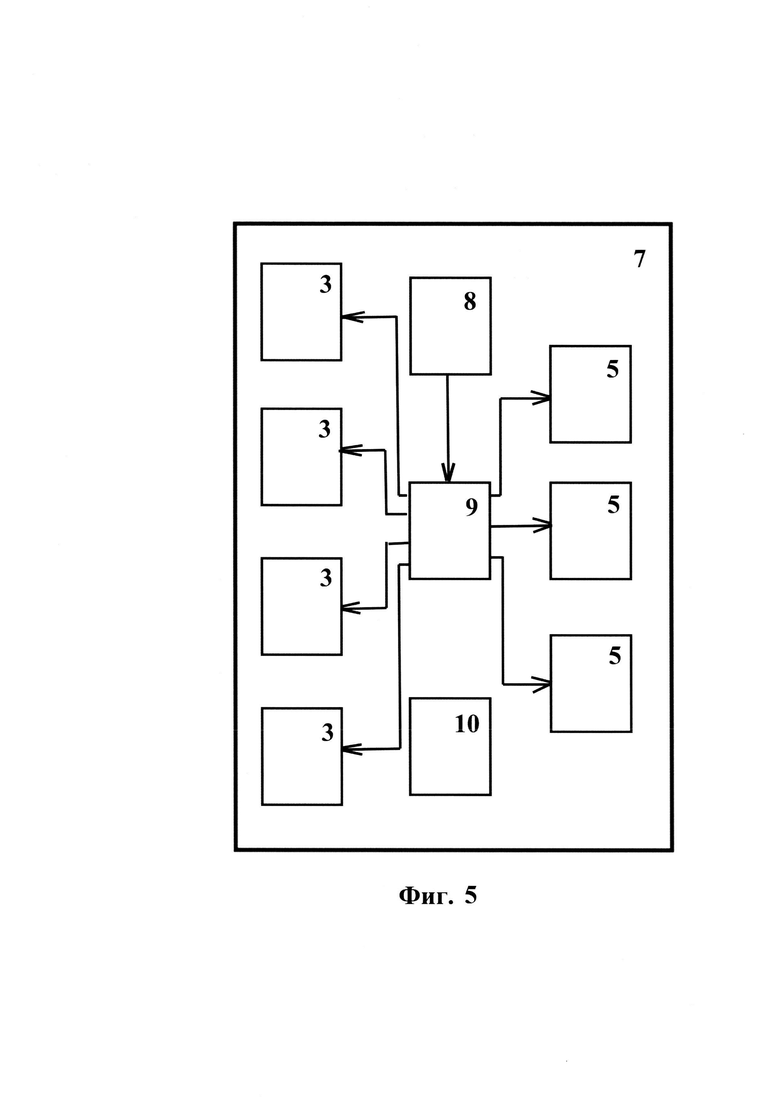
Фиг. 5 изображает электронную блок-схему транспортной платформы.
Позициями на чертежах обозначены: сферический движитель 1, колесный узел с шариковыми или роликовыми опорами 2, тормозные блоки 3, пружинную подвеску 4, электропривод 5, колесо электропривода 6, платформа 7, орган управления транспортным средством 8, бортовой компьютер 9, бортовой аккумулятор 10.
Предлагаемое устройство работает следующим образом.
Транспортное средство содержит расположенные в одной плоскости на платформе 7 четыре сферических движителя 1, установленные в колесных узлах с шариковыми или роликовыми опорами 2. Три колесных узла 2 со сферическими движителями 1 расположены в вершинах треугольника, в центре описанной окружности которого расположен колесный узел 2 со сферическим движителем 1 с двумя электроприводами 5, оси вращения которых перпендикулярны друг другу и лежат в плоскости сферических движителей 1 (фиг. 1 и фиг. 2).
Сферический движитель 1, расположенный в центре описанной окружности, является ведущим, а сферические движители 1, расположенные в вершинах треугольника, находятся от него на расстоянии радиуса описанной окружности. Электроприводы 5 посредством колес 6, установленных на валах электроприводов 5, фрикционо воздействуют на поверхность сферического движителя 1. В зависимости от направления и величины угловой скорости электроприводов 5, воздействующих на сферический движитель 1, платформа 7 будет двигаться в направлении и со скоростью, определяемыми сложением векторов силы, создаваемых электроприводами 1. На фигуре 3, а показан принцип формирования результирующего вектора движения VR платформы 7, где VX и VY вектора движения, создаваемые электроприводами 5 ведущего сферического движителя 1.
Платформа 7 под воздействием электроприводов 5 ведущего сферического движителя 1 может двигаться в любом направлении, но ее курсовое направление относительно центра масс, совпадающего с центром ведущего сферического движителя 1, остается неизменным. Для поворота курсового направления платформы 7 относительно центра ведущего сферического движителя 1 один из сферических движителей 1, расположенный в вершине треугольника, оснащен электроприводом 5, и является управляющим движителем 1. Причем ось вращения электропривода 5 управляющего движителя 1 параллельна линии, соединяющей центры ведущего и управляющего движителей 1, и, соответственно, вектор силы будет направлен под 90° к линии, соединяющей центры ведущего и управляющего движителей 1 (фиг. 3, а).
На фигуре 3, б показан принцип движения платформы 7 с поворотом курсового направления. При воздействии вектора VP управляющего движителя 1 на результирующий вектор движения VR платформа 7 будет двигаться по траектории движения ТД с поворотом курсового направления. В случае, когда платформа 7 стоит на месте, т.е. при векторе движения VR равном нулю, под воздействием вектора VP управляющего движителя 1 платформа 7 будет вращаться вокруг своей оси, проходящей через центр ведущего сферического движителя 1 (фиг. 3, в).
Для уменьшения торможения колесами электроприводов 6 сферических движителей 1 в качестве колес 6 может быть использовано всенаправленное колесо, колесо с небольшими дисками по окружности, перпендикулярными направлению вращения (Всенаправленное колесо. [Электронный ресурс]. // Википедия. Свободная энциклопедия - Режим доступа:
https://ru.wikipedia.org/wiki/%D0%92%D1%81%D0%B5%D0%BD%D0%B0%D0%BF%D1%80%D0%B0%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5%D0%BA%D0%BE%D0%BB%D0%B5%D1%81%D0%BE - (дата обращения 25.08.2023)).
Все движители 1 оборудованы тормозными блоками 3, которые выполняют функцию стояночного тормоза, обеспечивая транспортному средству возможность стоять на наклонной плоскости без сползания. Другой неочевидной функцией тормозных блоков 3 является обеспечение поворота транспортного средства нетривиальным способом. Поворот осуществляется за счет торможения одного из сферических движителей 1, который становится осью вращения. На фигуре 3, г показан поворот транспортного средства вокруг сферического движителя 1 «А», который заблокирован тормозным блоком 3 данного движителя 1. Под воздействием результирующего вектора движения VR платформа 7 будет двигаться по траектории движения ТД с поворотом вокруг центра сферического движителя 1 «А».
Такой способ поворота позволяет платформе 7 двигаться даже при выходе из строя электроприводов 5. Любой из работающих электроприводов 5 расположен между сферическими движителями 1, притормаживая которые можно осуществлять поворот платформы 7 в нужном направлении, формируя таким образом траекторию движения. Даже в случае, если работающим окажется электропривод 5 управляющего движителя 1, относительно которого сферические движители 1 окажутся по одну сторону, необходимый поворот можно осуществить реверсным ходом электропривода 5.
На основе использования способа поворота за счет торможения сферических движителей 1 может быть построена транспортная платформа 7 с одним электроприводом 5 (фиг.4). Единственный электропривод 5 является ведущим, а поворот в нужную сторону осуществляется торможением одного из сферических движителей 1. Ось вращения при этом будет проходить через центр соответствующего сферических движителей 1. На фигуре 4 показан поворот транспортного средства вокруг сферического движителя 1 «А», который заблокирован тормозным блоком 3 данного движителя 1. Под воздействием результирующего вектора движения V платформа 7 будет двигаться по траектории движения ТД с поворотом вокруг центра сферического движителя 1 «А». При этом обязательно использование в качестве колеса электропривода 6 всенаправленного колеса для устранения тормозящего момента силы, возникающего из-за несовпадения направления вектора движения V с направлением вращения вокруг сферического движителя 1 «А».
Для обеспечения гарантированного устойчивого контакта ведущего и управляющего сферических движителей 1 платформы 7 с поверхностью, по которой она передвигается, колесные узлы с шариковыми или роликовыми опорами 2 сферических движителей 1 без электроприводов 5 установлены на пружинные подвески 4. Это исключает провисание ведущего и управляющего сферических движителей 1 с электроприводами 5 платформы 7 в случае неровностей поверхности, которым обеспечивается контакт с поверхностью за счет проседания платформы 7 при помощи пружинных подвесок 4.
Управление электроприводами 5 транспортной платформы осуществляется бортовым компьютером 9 исходя из сигналов, поступающих от органа управления транспортным средством 8, с помощью которого водитель задает траекторию и скорость движения транспортного средства (фиг. 5). Бортовой компьютер 9, в соответствии с пожеланиями водителя, передаваемыми через орган управления транспортным средством 8, осуществляет расчет и передает на соответствующие электроприводы 5 ведущего и управляющего сферических движителей 1 управляющие сигналы и, тем самым, обеспечивает требуемые скорость и траекторию движения транспортного средства. Электропитание бортовым компьютером 9 и электроприводов 5 осуществляется от бортового аккумулятора 10, для упрощения цепи питания на структурной блок схеме транспортной платформы не показаны.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявляемого способа следующей совокупности условий:
- Заявленное устройство при его осуществлении, предназначено для использования в конструкции электромобильных и роботизированных транспортных средствах, в инвалидных колясках с электроприводом;
- для заявленного устройство в том виде, как оно охарактеризовано в независимом пункте изложенной формулы изобретения, подтверждена возможность его осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов;
- заявленное устройство при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата, состоящего в повышенной эксплуатационной надежности транспортного средства и дублировании осуществления поворотных маневров.
Предложенное устройство по сравнению с прототипом обеспечивает повышенную эксплуатационную надежность и безопасность транспортного средства за счет того, что в нем поворот может быть реализован либо за счет электропривода поворота, либо за счет торможения соответствующего сферического движителя, либо комбинированным сочетанием этих способов поворота. В случае выхода одного или даже двух электроприводов может быть реализован «аварийный» способ движения транспортного средства путем торможения соответствующего сферического движителя.
В целом, предложенное устройство по сравнению с прототипом является более простым, как следствие более надежным, и более дешевым техническим решением. В прототипе на каждый из четырех сферических движителей осуществляется воздействие пары колес (всего 8), на которые крутящий момент от электроприводов передается через сложную систему распределения крутящего момента. Соответственно, и алгоритм управления у прототипа сложнее, чем в предложенном устройстве.
Использование способа формирования траектории движения за счет торможения соответствующих сферических движителей позволяет создать упрощенный, по сравнению с базовым, вариант транспортного средства, содержащего три колесных узла со сферическими движителями и одним электроприводом. Не обладая всей полнотой маневров базового варианта, такое транспортное средство может найти применение в случаях, когда простота и дешевизна технического решения превалируют над маневренностью.
Предложенное устройство обеспечено защитой от провисания сферических движителей с электроприводами, что исключает проскальзывание и гарантирует корректное выполнение маневров. Оно также имеет систему тормозов, обеспечивающую фиксированное положение предложенного устройства на наклонной поверхности.
Дополнительным преимуществом и достоинством предложенного устройства транспортной платформы является возможность построения на ее основе беспилотных транспортных средств.
Пример. Возможность практической реализации предлагаемого устройства транспортной платформы была проверена путем изготовления колесного узла с ведущим сферическим движителем на шариковых опорах. В качестве сферического движителя был использован баскетбольный мяч размера 7 (диаметр 240 мм); шариковые опора были реализованы на 3/4''19 мм подшипниках LINK CNC модели CY-19A (длина - 53 мм.; ширина - 36 мм.; высота - 25 мм.; расстояние между крепежными отверстиями - 38 мм.); в качестве электроприводов использовались шаговые двигатели SUMTOR 57HS7630A6D8, управление электроприводами осуществлялось микроконтроллером 2Н Microstep Driver DM542; в качестве колеса электроприводов использовались всенаправленные омни-колеса VEX IQ 200mm Travel Omni-Directional Wheel, 2-Pack; бортовой компьютер был выполнен с использованием платы Arduino Due на основе 32-битного микроконтроллера Atmel SAM3X8E с ARM-процессором на базе ядра ARM Cortex-M3.
Собранный колесный узел ведущего сферического движителя позволил проверить режимы управления направлением и скоростью вращения сферического движителя и подтвердил возможность его всенаправленного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| Полноприводная транспортная платформа с электроприводом поворота колес и регулируемой колеёй | 2021 |
|
RU2764857C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ, ПОЛОЖЕНИЕМ В ПРОСТРАНСТВЕ И НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, РЕАЛИЗУЮЩЕГО СХЕМУ БОРТОВОГО ПОВОРОТА И СНАБЖЕНННОГО НЕЗАВИСИМЫМИ ЭЛЕКТРОПРИВОДАМИ КОЛЕС | 2012 |
|
RU2517284C2 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
Изобретение относится к электромобильным и роботизированным транспортным шасси. Устройство транспортного средства со сферическими движителями включает в себя бортовой компьютер, четыре расположенных в одной плоскости сферических движителя, установленных в колесных узлах с шариковыми или роликовыми опорами, и три электропривода. Один сферический движитель имеет два электропривода, оси вращения которых перпендикулярны друг другу и лежат в плоскости сферических движителей. Три колесных узла со сферическими движителями расположены в вершинах треугольника, в центре описанной окружности которого расположен колесный узел со сферическим движителем с двумя электроприводами. На все сферические движители установлены тормозные блоки. На сферический движитель, расположенный в вершине треугольника, установлен электропривод, ось вращения которого лежит в плоскости расположения сферических движителей параллельно линии, проходящей через центры ведущего сферического движителя и движителя, на который установлен данный электропривод. Колесные узлы двух других сферических движителей без электроприводов, расположенных в вершинах треугольника, установлены на пружинную подвеску. Достигается повышение эксплуатационной безопасности транспортного средства и адаптивное реагирование на изменение скоростного режима и траектории движения транспортного средства. 5 ил.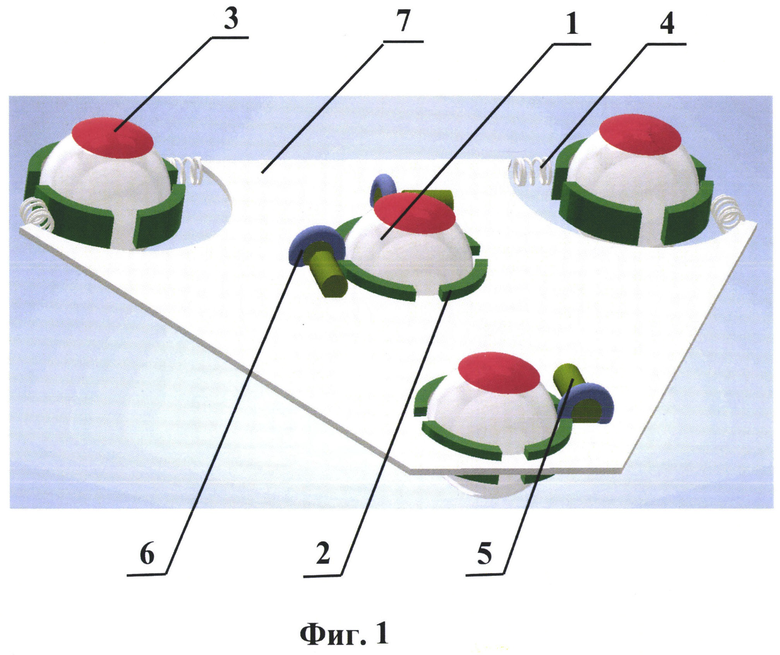
Устройство транспортного средства со сферическими движителями, включающее в себя бортовой аккумулятор, орган управления, бортовой компьютер, четыре расположенных в одной плоскости сферических движителя, установленных в колесных узлах с шариковыми или роликовыми опорами, три электропривода, причем один сферический движитель имеет два электропривода, оси вращения которых перпендикулярны друг другу и лежат в плоскости сферических движителей, приводы сферического движителя управляются бортовым компьютером, отличающееся тем, что три колесных узла со сферическими движителями расположены в вершинах треугольника, в центре описанной окружности которого расположен колесный узел со сферическим движителем с двумя электроприводами, на все сферические движители установлены тормозные блоки, на сферический движитель, расположенный в вершине треугольника, установлен электропривод, ось вращения которого лежит в плоскости расположения сферических движителей параллельно линии, проходящей через центры ведущего сферического движителя и движителя, на который установлен данный электропривод, колесные узлы двух других сферических движителей без электроприводов, расположенных в вершинах треугольника, установлены на пружинную подвеску.
| JP 2010030360 A, 12.02.2010 | |||
| US 2023174176 A1, 08.06.2023 | |||
| CN 112739606 A, 30.04.2021 | |||
| JP 2010215082 A, 30.09.2010 | |||
| Статический полупроводниковый преобразователь | 1961 |
|
SU145276A1 |

