Изобретение относится к технике промышленных уровнемеров, использующих локационный принцип измерения расстояния до контролируемой среды. Волноводный вариант уровнемера служит для измерения уровня жидкой среды. В вертикально установленный волновод среда заходит через соответствующим образом выполненные перфорационные отверстия. Применяется частотная модуляция зондирующего сигнала (ЛЧМ модуляция), измеряемое расстояние определяется по разностной частоте между зондирующим и отраженным сигналами [1].
Волноводный вариант уровнемера обладает рядом достоинств:
- излучаемый и отраженный сигнал распространяются в замкнутом пространстве волновода, что избавляет от помех за счет отражений от элементов емкости, содержащей контролируемую среду;
- отсутствие рассеяния в пространство электромагнитных волн позволяет снизить уровень мощности передающего модуля, что также улучшает помеховую обстановку. Есть и другие достоинства.
К основным недостаткам волноводных уровнемеров можно отнести:
- зависимость задержки сигнала от частоты (наличие дисперсии), что приводит к изменению разностной частоты, а следовательно, к существенным ошибкам измерения уровня контролируемой среды;
- для многих сред наблюдается налипание на стенки волновода, что также приводит к ошибкам измерения уровня контролируемой среды.
В данном изобретении рассматривается только влияние дисперсии в предположении, что налипания нет. Ослабление влияния дисперсии возможно путем введения предыскажения в закон частотной модуляции (ЧМ) СВЧ сигнала [2]. Этот метод является аналогом предлагаемого изобретения, однако необходимое предыскажение в [2] зависит от расстояния по волноводу до продукта, поперечного сечения волновода и ряда других факторов. Это приводит к усложнению процедуры излучаемого сигнала, и, кроме того, это будет сопровождаться дополнительными ошибками, так как в реальных условиях выполнить идеальное предыскажение нельзя.
Следовательно, возникает задача создания способа определения расстояния до контролируемой среды в волноводе, свободного от проблемы дисперсии.
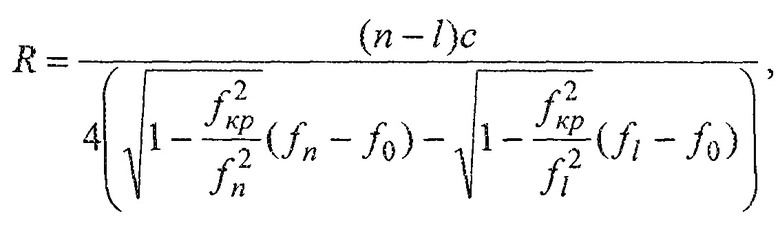
Такой способ, прототипом которого служит [3], предлагается в данном изобретении и предполагает расчет расстояния по следующей формуле:

где k - количество нулей сигнала разностной частоты (СРЧ) на интервале наблюдения, равном полупериоду модуляции;  - критическая частота волновода;
- критическая частота волновода;  - несущая частота;
- несущая частота;  - частоты в моменты k-го и первого нулей СРЧ; с - скорость света в вакууме.
- частоты в моменты k-го и первого нулей СРЧ; с - скорость света в вакууме.
Следует отметить, что при  (свободное пространство) формула (1) переходит в расчетную формулу в [3].
(свободное пространство) формула (1) переходит в расчетную формулу в [3].
Выражение (1) получается на основе следующего анализа.
Сигнал, излучаемый в волновод, имеет вид:
u(t)=U0cosω(t)t.
Сигнал на смесителе при отражении от среды, находящейся на расстоянии R по волноводу, определяется по формуле:
uc(t)=Uc0 cos(ω(t-τЗ)t+ϕ),
где ϕ - некоторый фазовый сдвиг;  - время задержки.
- время задержки.
После смесителя СРЧ принимает следующий вид:
uP(t)=UP0 cos((ω(t)-ω(t-τЗ))t-ϕ).
При этом разностная частота
где  - период симметричной треугольной модуляции; ΔF - диапазон перестройки частоты.
- период симметричной треугольной модуляции; ΔF - диапазон перестройки частоты.
Фаза разностной частоты

В тех точках, где СРЧ равняется нулю,

где n=1, 2, …, k, k - число нулей СРЧ на полупериоде модуляции.
Каждому значению n в (3) соответствует своя пара значений  . При линейной ЧМ связь между ними задается формулой
. При линейной ЧМ связь между ними задается формулой

С учетом (4) и (3) выражение (2) записывается в виде

Примем n=1, тогда

Приняв в (5) n=k и вычитая (6), приходим к (1).
Очевидно, что при определении R расчет можно вести не по крайним нулям СРЧ - (1, k), а по некоторым промежуточным их значениям - (l, n), где 1≤l<n, n≤k. Необходимость такого варианта может быть вызвана помеховой обстановкой.
В этом более общем случае расчет расстояния до контролируемой среды следует вести по формуле
Очевидно, что формула (1) обеспечивает большую точность, чем (7), если сосредоточенная помеха отсутствует.
В соответствии с (1) были проведены расчеты относительной ошибки измерения расстояния  , где
, где  - измеренное расстояние, для круглого волновода диаметром 25 мм с волной Н11 и симметричной треугольной модуляционной характеристики с периодом модуляции
- измеренное расстояние, для круглого волновода диаметром 25 мм с волной Н11 и симметричной треугольной модуляционной характеристики с периодом модуляции  при различных значениях параметров измерителя.
при различных значениях параметров измерителя.
При расчетах СРЧ задавался в виде

где 
 - время задержки отраженного сигнала; ϕ - произвольная фаза; n(tj) - аддитивный белый гауссовский шум.
- время задержки отраженного сигнала; ϕ - произвольная фаза; n(tj) - аддитивный белый гауссовский шум.
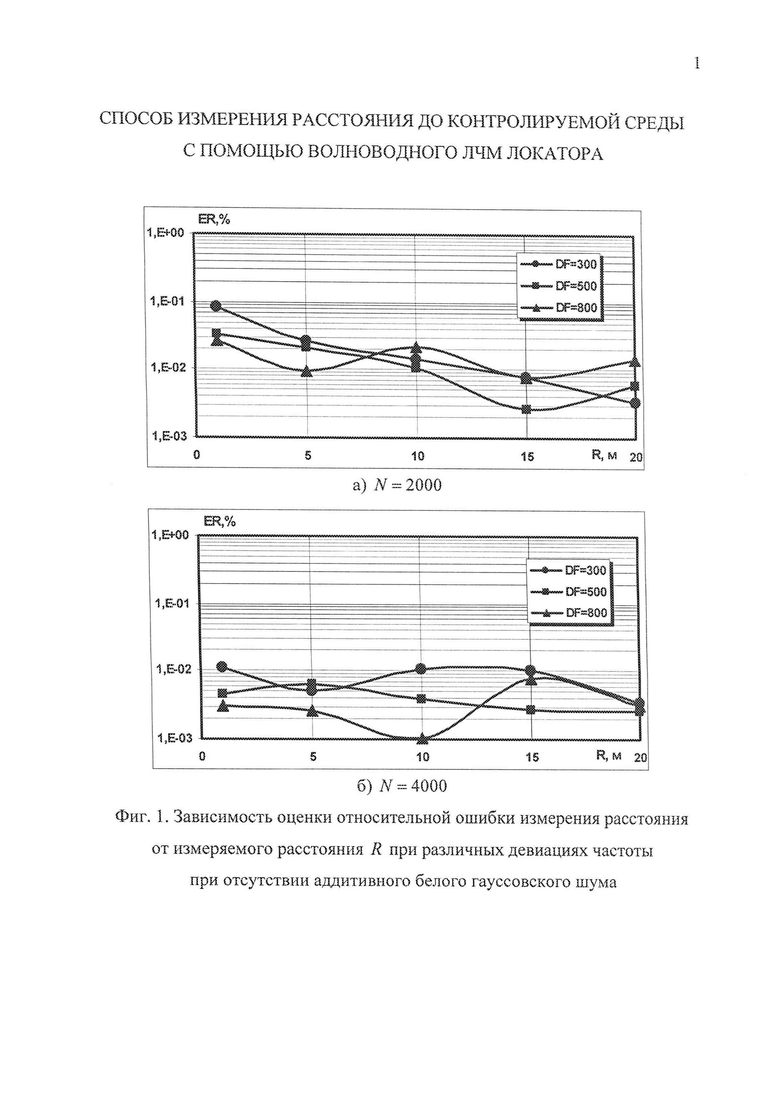
Расчеты проводились методом статистических испытаний при следующих параметрах зондирующего сигнала: число отсчетов СРЧ на интервале анализа  N=2000; 4000, несущая частота
N=2000; 4000, несущая частота  , критическая частота
, критическая частота  , девиация частоты ΔF=300; 500; 800 МГц, величина ϕ варьировалась в пределах [0÷π), усреднение в точках осуществлялось по 106 значениям.
, девиация частоты ΔF=300; 500; 800 МГц, величина ϕ варьировалась в пределах [0÷π), усреднение в точках осуществлялось по 106 значениям.
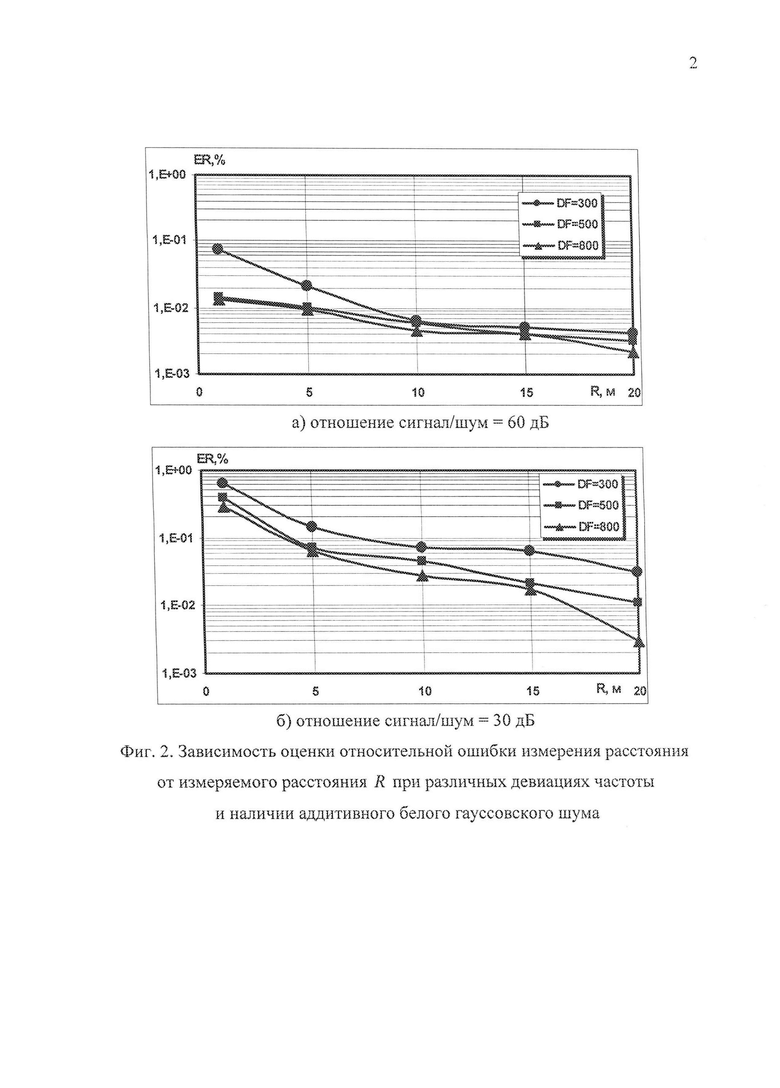
Результаты расчетов приведены на Фиг. 1 и Фиг. 2. Зависимости на Фиг. 1 свидетельствуют об отсутствии влияния дисперсии на определение расстояния в соответствии с формулой (1), поскольку величина ER находится в пределах (10-2÷3⋅10-3)% и имеет явно методическую природу, уменьшаясь с ростом N. Зависимости, приведенные на Фиг. 2, не противоречат сделанным выше выводам.
Предлагаемый способ измерения расстояния в соответствии с (1) и (7) для волноводного ЧМ уровнемера не известен для способов и устройств, из чего следует соответствие его критерию «новизна».
Изобретательский уровень определяется основным свойством предлагаемого способа - он свободен от влияния дисперсии на ошибку определения расстояния до контролируемой среды, которая при наличии дисперсии может составлять десятки процентов, что является неприемлемым. Отсутствие влияния дисперсии избавляет от необходимости нейтрализовывать ее с помощью с помощью специальных методов, например, введением предыскажений в зондирующий сигнал, что приводит к усложнению функциональной схемы измерителя и возникновению дополнительных ошибок. Отсутствие влияния дисперсии сохраняется при изменении девиации частоты и длине волновода (Фиг. 1). Это свидетельствует об общности предлагаемого способа.
На основании сказанного можно утверждать, что заявляемый способ отвечает критерию «изобретательский уровень».
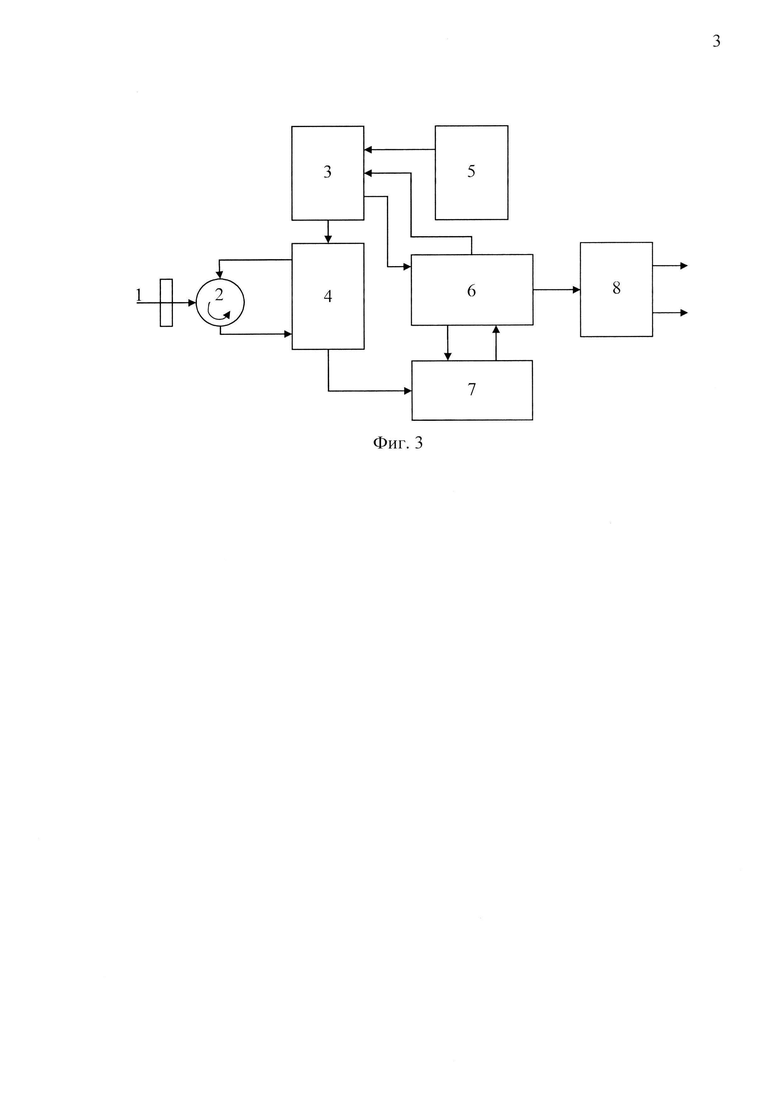
Возможная структурная схема реализации предлагаемого способа приведена на Фиг. 3. Обозначенные блоки выполняют следующие функции: 1 - волновод; 2 - циркулятор; 3 - цифровой синтезатор частот; 4 - приемопередающий СВЧ модуль; 5 - задающий генератор; 6 - микропроцессор; 7 - блок аналоговой обработки СРЧ (усиление, фильтрация, ограничение); 8 - блок выходной.
Библиографические данные
1. Б.А. Атаянц, В.М. Давыдочкин и др. Прецизионные системы ближней частотной радиолокации промышленного применения. М.: Радиотехника. 2012.
2. Б.А. Атаянц, В.М. Давыдочкин, В.В. Езерский. Точность измерения уровня волноводным частотно-модулированным уровнемером. // Радиотехника. 2015. №5, С. 73-78.
3. Патент РФ №2436117, МКИ G01S 13/34. Опубл. 10.12.2011. Бюл. №34.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| СПОСОБ УМЕНЬШЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ВОЛНОВОДНОГО УРОВНЕМЕРА С ЛЧМ СИГНАЛОМ | 2018 |
|
RU2693032C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2655746C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2654215C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА НА ОСНОВЕ ЧМ ЛОКАТОРА | 2014 |
|
RU2567866C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩЕГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ ДАЛЬНОМЕРА С ПЕРИОДИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2234716C1 |
| БЕСКОНТАКТНЫЙ РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В ЕМКОСТИ | 2017 |
|
RU2650611C1 |
| БЕСКОНТАКТНЫЙ РАДИОВОЛНОВЫЙ УРОВНЕМЕР | 2017 |
|
RU2649665C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2003 |
|
RU2244268C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
Изобретение относится к технике промышленных уровнемеров, использующих принцип излучения в волновод частотно-модулированного по симметричному треугольному закону сигнала, получение сигнала разностной частоты путем смешивания отраженного и излучаемого сигналов. Обработка сигнала разностной частоты включает определение числа нулевых значений сигнала разностной частоты на полупериоде модуляции, определение частоты излучения, соответствующей каждому нулю сигнала разностной частоты, для чего используется цифровая модуляция. По полученным данным с учетом размера волновода и параметрам модуляции по приведенной формуле вычисляется расстояние. В простейшем случае для вычисления расстояния достаточно знать число нулей, частоты излучения первого и последнего нуля, а также несущую частоту. Основной достигаемый результат - отсутствие влияния дисперсии волновода на измеряемое расстояние и сопутствующее этому упрощение функциональной схемы измерителя, уменьшение ошибок, возникающих при применении предыскажения и потенциально других возможных методов противодействия дисперсии. 3 ил.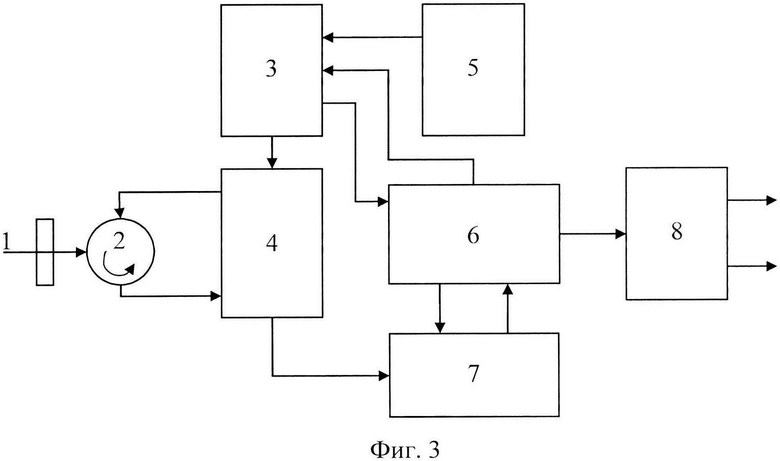
Способ измерения расстояния до контролируемой среды, включающий излучение в полый волновод, погруженный в жидкую среду, ЧМ сигнала, модулированного по частоте по периодическому симметричному треугольному закону, реализуемому цифровым синтезатором частот, прием отраженного от среды сигнала, получение сигнала разностной частоты путем смешивания принятого и излучаемого сигналов, измерение числа нулевых значений k сигнала разностной частоты на каждом полупериоде модуляции, расчет частот 
 соответствующих выбранным нулевым значениям сигнала разностной частоты, отличающийся тем, что измеряемое расстояние определяется по формуле:
соответствующих выбранным нулевым значениям сигнала разностной частоты, отличающийся тем, что измеряемое расстояние определяется по формуле:
где  - критическая частота волновода;
- критическая частота волновода;  - несущая частота;
- несущая частота;  - частоты, соответствующие выбранным нулевым точкам, 1≤l<n, n≤k; с - скорость света в вакууме.
- частоты, соответствующие выбранным нулевым точкам, 1≤l<n, n≤k; с - скорость света в вакууме.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2234108C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ЖИДКОСТИ В ЕМКОСТИ | 2012 |
|
RU2504739C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2008 |
|
RU2410650C2 |
| US 5504490 A1, 02.04.1996. | |||

