Изобретение относится к способам позиционирования подводных осмотровых аппаратов и может быть использовано для позиционирования любого подводного оборудования, предназначенного для регулярного обследования подводных трубопроводов и других объектов.
Известны гидроакустические системы позиционирования (ГСП) подводного оборудования (http://www.tetis-pro.ru/catalog/329/1002/), предназначенные для определения их точных координат, параметров и траектории движения относительно судна-носителя в реальном масштабе времени.
Принцип работы гидроакустической системы позиционирования заключается в определении положения маяка-ответчика, установленного на подводное оборудование, относительно судна-носителя. Для этого судно оборудуется одной или несколькими гидроакустическими антеннами (ГА), передающими и принимающими сигналы от маяков-ответчиков. По параметрам этих сигналов надводный блок обработки, построенный на базе персонального компьютера, определяет пеленг и дистанцию до маяка-ответчика. В дальнейшем специальное программное обеспечение отображает параметры и траекторию движения подводного оборудования на мониторе оператора. При подключении к системе глобального позиционирования GPS или ГЛОНАСС возможно отображение всех данных в абсолютных географических координатах.
Недостатками настоящей системы является:
- необходимость оснащения каждого спускаемого подводного оборудования маяком-ответчиком и влияние на точность показаний возможных электромагнитных помех;
- значительные временные затраты на поиск подводного трубопровода (иного объекта), даже имея его точные координаты, так как при наличии сильных подводных течений возможно смещение подводного трубопровода, а также его заиливание.
Целью предлагаемого изобретения является создание способа позиционирования подводного оборудования относительно обследуемого подводного трубопровода, позволяющего гарантированно, быстро и точно осуществить спуск подводного осмотрового аппарата к заданной точке обследуемого подводного трубопровода (иного объекта) без применения навигационного оборудования и дополнительных энергетических затрат.
Указанная цель достигается за счет применения:
- баллончика со сжатым газом, срабатывающего от внешнего управляющего сигнала;
- надувного резинового буя;
- поплавка с демпфирующим посадочным устройством, шарнирно закрепленным на обследуемом подводном трубопроводе;
- шнура, соединяющего надувной резиновый буй с демпфирующим посадочным устройством поплавка;
- подводного осмотрового аппарата с дистанционно раскрываемым замком-направляющей.
Сущность настоящего изобретения состоит в том, что предлагаемый способ позиционирования подводного оборудования относительно обследуемого подводного трубопровода, включающий в себя наличие судна-носителя, подводного осмотрового аппарата, кабеля-троса, согласно изобретению, предполагает использование баллончика со сжатым газом, срабатывающего от внешнего управляющего сигнала и надувающего резиновый буй, который всплывает на поверхность воды, при этом шнур, соединяющий резиновый буй с демпфирующим посадочным устройством поплавка, является направляющей, за которую дистанционно раскрываемым замком-направляющей цепляется подводный осмотровый аппарат, и по которой он спускается на демпфирующее посадочное устройство поплавка, а шарнирно закрепленный поплавок на обследуемом подводном трубопроводе обеспечивает вертикальную посадку подводного осмотрового аппарата.
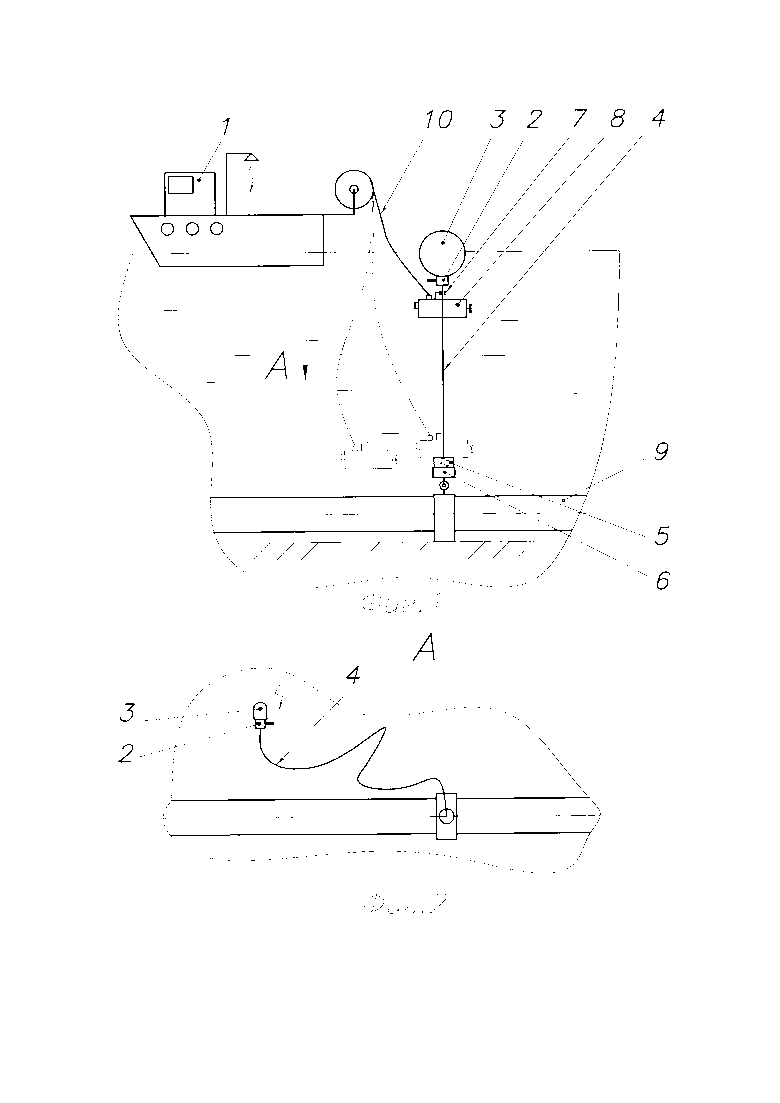
На фиг. 1, 2 показана схема реализации способа позиционирования подводного оборудования относительно обследуемого подводного трубопровода, где:
1 - судно-носитель;
2 - баллончик со сжатым газом;
3 - резиновый буй;
4 - шнур;
5 - демпфирующее посадочное устройство;
6 - поплавок
7 - дистанционно раскрываемый замок-направляющая;
8 - подводный осмотровый аппарат;
9 - подводный трубопровод;
10 - кабель-трос.
Способ осуществляется следующим образом.
Прибыв в заданную точку для проведения подводных осмотровых работ, с судна-носителя 1 подается внешний управляющий сигнал (гидроакустический) на баллончик со сжатым газом 2, который срабатывает от полученного сигнала и надувает соединенный с ним резиновый буй 3, который всплывает на поверхность воды, вытягивая за собой закрепленный на нем шнур 4. Способ обнаружения всплывшего резинового буя 3 - любой, в том числе визуальный (при небольших глубинах залегания подводного трубопровода 9). Другой конец шнура 4 закреплен на демпфирующем посадочном устройстве 5 поплавка 6. Таким образом, шнур 4, служит направляющей, за которую дистанционно раскрываемым замком-направляющей 7 цепляется подводный осмотровый аппарат 8 и по которой он спускается на демпфирующее посадочное устройство 5 (для удобства резиновый буй 3 может быть отсоединен, а шнур 4 дополнительно натянут).
Поплавок 6 шарнирно закреплен на обследуемом подводном трубопроводе 9 для обеспечения вертикальной посадки подводного осмотрового аппарата 8.
После спуска подводного осмотрового аппарата 8 и посадки его на демпфирующее посадочное устройство 5 оператор открывает дистанционно раскрываемый замок-направляющую 7, ориентирует подводный осмотровый аппарат 8 вдоль подводного трубопровода 9 в нужном направлении и приступает к его осмотру. Управление подводным осмотровым аппаратом 8 осуществляется по кабелю-тросу 10 или по бескабельному варианту.
По завершению осмотровых работ к шнуру 4, взамен старого, прикрепляется новый баллончик со сжатым газом 2, соединенный с резиновым буем 3 (в сложенном состоянии), который затапливается до проведения следующих осмотровых работ (см. фиг. 2).
Резиновый буй 3 целесообразно закрывать защитным кожухом, сбрасываемым во время срабатывания баллончика со сжатым газом 2.
Предлагаемый способ применим для позиционирования подводного оборудования любого типа относительно любого подводного объекта, требующего регулярного обследования. Места обследований и их количество определяет проектировщик по согласованию с заказчиком исходя из рельефа дна (для контроля провисов трубопровода), наличия трубопроводов-отводов (для контроля состояния тройников) и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ ОТНОСИТЕЛЬНО СУДНА-НОСИТЕЛЯ | 2014 |
|
RU2566564C1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
| Устройство типа "Купол" для ликвидации подводных разливов нефти в комплекте с технологическим оборудованием | 2019 |
|
RU2723799C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ПРОВЕДЕНИЯ ПОДВОДНЫХ РАБОТ | 2016 |
|
RU2651932C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
Изобретение относится к способам позиционирования подводных осмотровых аппаратов и может быть использовано для позиционирования любого подводного оборудования, предназначенного для регулярного обследования подводных трубопроводов и других объектов. Целью предлагаемого изобретения является создание способа позиционирования подводного оборудования относительно обследуемого подводного трубопровода, позволяющего гарантированно, быстро и точно осуществить спуск подводного осмотрового аппарата к заданной точке обследуемого подводного трубопровода (иного объекта) без применения навигационного оборудования и дополнительных энергетических затрат. Указанная цель достигается за счет применения:
- баллончика со сжатым газом, срабатывающего от внешнего управляющего сигнала;
- надувного резинового буя;
- поплавка с демпфирующим посадочным устройством, шарнирно закрепленным на обследуемом подводном трубопроводе;
- шнура, соединяющего надувной резиновый буй с демпфирующим посадочным устройством поплавка;
- подводного осмотрового аппарата с дистанционно раскрываемым замком-направляющей.
Предлагаемый способ применим для позиционирования подводного оборудования любого типа относительно любого подводного объекта, требующего регулярного обследования. Места обследований и их количество определяет проектировщик по согласованию с заказчиком исходя из рельефа дна (для контроля провисов трубопровода), наличия трубопроводов-отводов (для контроля состояния тройников) и т.д. 2 ил.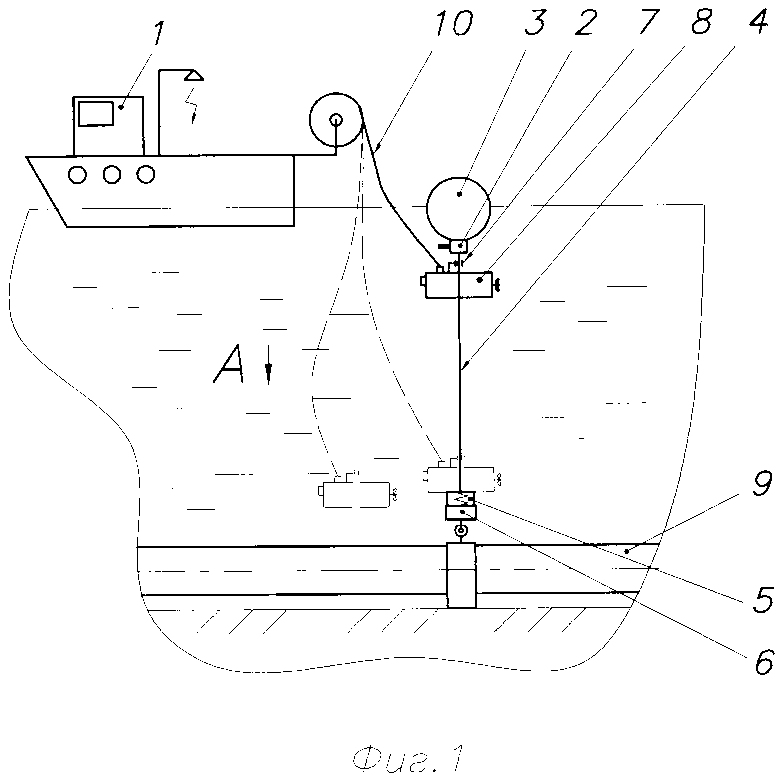
Способ позиционирования подводного оборудования относительно обследуемого подводного трубопровода, включающий в себя наличие судна-носителя, подводного осмотрового аппарата, кабеля-троса, отличающийся тем, что предполагает использование баллончика со сжатым газом, срабатывающего от внешнего управляющего сигнала и надувающего резиновый буй, который всплывает на поверхность воды, при этом шнур, соединяющий резиновый буй с демпфирующим посадочным устройством поплавка, является направляющей, за которую дистанционно раскрываемым замком-направляющей цепляется подводный осмотровый аппарат и по которой он спускается на демпфирующее посадочное устройство поплавка, а шарнирно закрепленный поплавок на обследуемом подводном трубопроводе обеспечивает вертикальную посадку подводного осмотрового аппарата.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2271021C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2659176C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| US 9223025 B2, 29.12.2015. | |||

