Изобретение относится к автоматической системе обеспечения теплового режима (СОТР) бортовой аппаратуры (БА) космического аппарата (КА), представляет собой блок управления нагревателями (БУН), управляющий подключаемыми внешними электронагревателями, размещенными на элементах конструкции КА, на основании заданных температурных уставок и информации о температуре, снимаемой с подключаемых внешних термодатчиков, и величине напряжения питания и тока потребления БА, и может найти применение в системе прецизионной стабилизации температуры посадочного места бортового стандарта частоты.
На КА с бесконтейнерным вариантом исполнения БА открыто располагается непосредственно на рамах и корпусе КА и работает в условиях космического вакуума. Распределение температур по элементам конструкции КА в таких условиях определяется полем внешних тепловых потоков, свойствами поверхности КА, ориентации его в пространстве, энергопотреблением БА, тепловыми связями в КА и рядом других факторов. Для обеспечения работоспособности различной БА задаются различные температурные условия, которые обеспечиваются в любом КА с помощью СОТР.
Отдельная БА должна работать в узком температурном диапазоне, при этом для обеспечения предъявляемых к ней требований к эксплуатационным параметрам должна поддерживаться очень высокая стабильность температуры ее посадочного места. Такую аппаратуру устанавливают на специальную термостабилизированную платформу (ТП) с встроенными в нее термодатчиками и электронагревателями. При этом контроль температуры в различных точках посадочного места БА на ТП и включение электронагревателей для поддержания требуемой температуры осуществляет БУН. Стабильность температурного режима - один из важных факторов, влияющих на надежность работы БА, поэтому в БУН для получения высокой стабильности температуры посадочного места БА на ТП применяют различные импульсные методы управления включением электронагревателей, которые основанны на широтно-импульсной модуляции (ШИМ) длительности включения электронагревателей. Так, например, в модуле системы прецизионной термостабилизации (МСПТ) КА «Глонасс-М» в качестве посадочного места для имитатора стандарта частоты используется ТП с гипертеплопроводящим основанием, контроль температуры в различных точках которой и включение встроенных в ТП электронагревателей осуществляет экспериментальный блок коммутации нагревателей (БКН-Э), размещенный на другой ТП, но с менее жесткими требованиями к термостабилизации посадочного места. Термостабилизация посадочного места на обеих ТП обеспечивается при автономной работе БКН-Э по специальным алгоритмам, предусматривающим при заданном периоде импульсного включения электронагревателей сбор оцифрованной с помощью встроенного аналого-цифрового преобразователя (АЦП) информации о температуре на различных участках посадочного места ТП и напряжения питания и тока потребления имитатора стандарта частоты, ее обработку и по результатам обработки формирование управляющих воздействий на изменение длительности включения электронагревателей.
Известен БУН для решения задачи автоматического регулирования температуры с применением ШИМ в n каналах регулирования с периодом генератора пилообразного напряжения с одновременной автоматической установкой в каждом канале своего коэффициента усиления (см. патент РФ №106768), содержащий соединенный со сторожевым таймером микропроцессор (МП), оперативное запоминающее устройство (ОЗУ), порты вывода цифровой информации, постоянное запоминающее устройство (ПЗУ) и устройство приема дискретных данных (УПД), связанные между собой через внутреннюю магистраль, разъем для подключения термодатчиков, соединенный с входами измерительных устройств (ИУ), выходы которых соединены с входами аналогового коммутатора (АК), управляющий вход которого соединен с УПД, а выход - с одним входом компаратора, второй вход которого соединен с выходом цифроаналогового преобразователя (ЦАП), а выход - с одним входом УПД, вторые выходы которого соединены с выходами устройства управления, выходы которого соединены с командным разъемом, вход МП соединен с портом вывода цифровой информации, который соединен с входами выходных формирователей (ВФ), входами ЦАП и одним входом формирователя телеметрического сигнала, второй вход которого соединен с выходом ЦАП, а выход - с разъемом телеметрии, выходы ВФ соединены с разъемом для подключения электронагревателей.
В таком БУН обеспечиваются широкие функциональные возможности, точность и надежность блока управления n-м количеством электронагревателей для объектов, требующих разных значений рабочих температур. Технический эффект достигается за счет реализации цифрового способа управления процессом импульсного нагрева с цикличной обработкой информации от внешних термодатчиков и сравнения их с температурными уставками, прошитыми в ПЗУ. Однако сравниваемые сигналы являются аналоговыми, а это, особенно в жестких условиях эксплуатации, негативно сказывается на точность измерений, что в целом определяет недостаточную надежность БА по температурному режиму.
Наиболее близким аналогом (прототипом) по технической сущности к заявленному БУН является устройство управления нагревателями аппаратуры КА с n-каналами регулирования, в котором высокая точность и стабильность поддерживаемых температур достигается цифровым методом сравнения записанных в ПЗУ эталонных температур с фактическими, обеспечиваемыми электронагревателями аппаратуры КА, реализуемом конкретной структурной схемой устройства определенных блоков (см. патент РФ №2571728), содержащее последовательно соединенные информационное интерфейсное устройство (ИИУ), линия передачи информации мультиплексного канала обмена (МКО) которого соединена с разъемом для подключения к локальному контроллеру внешней бортовой ЭВМ, и блок управления, связанные через внутреннюю магистраль МП, ОЗУ с портами вывода цифровой информации, ПЗУ и УПД, первый вход которого соединен с выходом блока управления, а также ВФ, информационные входы которых соединены с первым портом вывода цифровой информации ОЗУ, а выходы соединены с входами силовых ключей (СК), выходы которых соединены с разъемом для подключения внешних электронагревателей, последовательно соединенные разъем для подключения N-го количества внешних термодатчиков, N ИУ по каждому термодатчику, АК с N входами по каждому сигналу с термодатчиков, управляющий вход которого соединен с одним из выходов второго порта вывода цифровой информации ОЗУ, другой выход которого соединен с первым входом ИИУ, АЦП, выход которого соединен со вторым входом ИИУ, и цифровой компаратор, второй вход которого соединен с третьим портом вывода цифровой информации ОЗУ и третьим входом ИИУ, а выход со вторым входом УПД. Заявленный БУН как и прототип содержит ИИУ, линия передачи информации МКО которого соединена с разъемом для подключения к локальному контроллеру внешней бортовой ЭВМ, объединенные через внутреннюю магистраль МП, ОЗУ, ПЗУ и УПД, а также последовательно соединенные ВФ и СК, выходы которых соединены с разъемом для подключения к внешним электронагревателям, последовательно соединенные ИУ, выходы которого соединены с разъемом для подключения к внешним термодатчикам, АК и АЦП.
В таком устройстве управления нагревателями обеспечивается сравнение значений текущих значений температур с температурными уставками, представленными в цифровом виде, по результатам которого производится управление ВФ (СК закрыты при текущей температуре, превышающей температурную уставку, или открыты при текущей температуре, меньшей температурной уставки), и тем самым достигается высокая точность и стабильность результата (отсутствует аналоговый метод измерений, при котором в условиях эксплуатации имеет место нестабильность, а значит и точность характеристик).
Однако такое устройство управления нагревателями имеет недостаточно широкие функциональные возможности из-за сложности введения в устройство дополнительных функций, так как это потребует существенного изменения структурных связей отдельных функциональных устройств и доработки всего устройства.
Этот недостаток можно исключить применением в БУН магистрально-модульного принципа построения, при котором отдельные функциональные устройства группируются в унифицированные функционально законченные модули, обмен информацией между которыми производится через межмодульную магистраль.
Кроме того устройство-прототип не в полной мере учитывает при стабилизации температуры в определенных точках посадочных мест БА на ТП возможное влияние неравномерности температурного поля на внешней поверхности ТП и перетекание тепловых потоков между основаниями БА и БУН на ухудшение стабильности температуры из-за отсутствии информации об изменении собственного тепловыделения БА в различных режимах ее работы.
Этот недостаток можно исключить введением в БУН дополнительных аппаратно-программных средств, позволяющих измерять изменение тепловыделения БА в различных режимах ее работы и учитывать его при определении характеристик теплового потока через ТП.
Задачами предлагаемого технического решения являются:
- расширение функциональных возможностей БУН путем организации его структуры на основе магистрально-модульного принципа построения;
- повышение стабильности поддержания температуры в различных точках посадочного места БА на ТП путем введения в состав БУН программно-аппаратных средств сбора и обработки цифровой информации о напряжении питания и токе потребления БА и использования ее для внесения поправки на изменение длительности импульсов включения внешних электронагревателей.
Решение поставленной первой задачи достигается тем, что в устройстве управления нагревателями аппаратуры КА отдельные функциональные устройства сгруппированы в унифицированные функционально законченные модули - микропроцессорный модуль управления, модуль коммутации нагревателей и модуль контроля температуры, причем в микропроцессорный модуль управления, содержащий ИИУ, линия передачи информации МКО которого соединена с разъемом для подключения к локальному контроллеру внешней бортовой ЭВМ, и объединенные через внутримодульную магистраль МП, ОЗУ, ПЗУ и УПД, введено устройство ввода-вывода (УВВ), входы управления которого соединены с выходами управления МП, а информационные входы-выходы соединены с первыми информационными входами-выходами УПД, вторые информационные входы-выходы которого соединены с информационными входами-выходами ИИУ, в модуль коммутации нагревателей, содержащий последовательно соединенные ВФ и СК, выходы которых соединены с разъемом для подключения к внешним электронагревателям, введено УВВ, информационные выходы которого соединены с информационными входами ВФ, а информационные входы соединены с выходами контроля состояния ВФ, причем порт обмена информацией УВВ соединен через межмодульную магистраль с портом обмена информацией УВВ микропроцессорного модуля управления, в модуль контроля температуры, содержащий последовательно включенные ИУ, входы которого соединены с разъемом для подключения к термодатчикам, АК и АЦП, введено УВВ, информационные входы которого соединены с информационными выходами АЦП, а выходы управления соединены с входами управления АК, причем порт обмена информацией УВВ соединен через межмодульную магистраль с портом обмена информацией УВВ микропроцессорного модуля управления.
Решение поставленной второй задачи достигается тем, что в устройство управления нагревателями аппаратуры КА введен модуль контроля питания, содержащий СК и последовательно включенные ИУ, АК и АЦП, а также УВВ, информационные входы которого соединены с информационными выходами АЦП, первые выходы управления соединены с входами управления АК, вторые выходы управления соединены с входами СК, выходы которых соединены с входами ИУ и с разъемом для подключения к шинам питания БА, причем порт обмена информацией УВВ соединен через межмодульную магистраль с портом обмена информации УВВ микропроцессорного модуля управления.
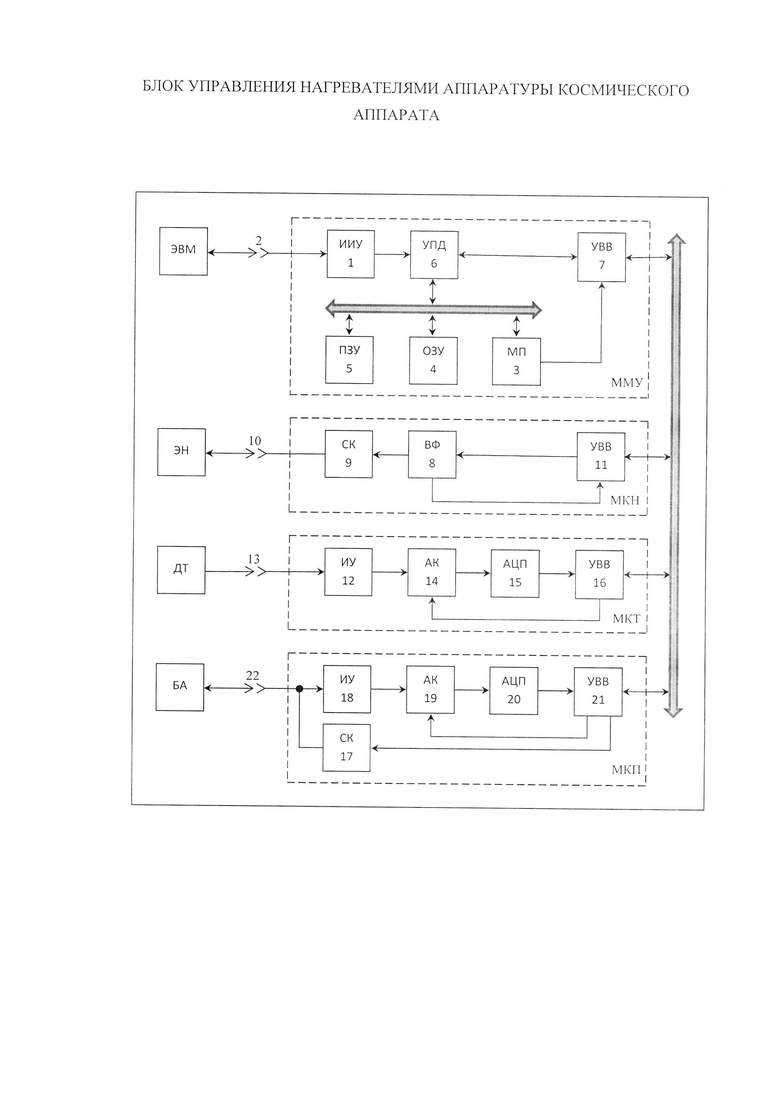
На чертеже представлена структурная схема заявленного БУН аппаратуры КА.
БУН аппаратуры КА содержит в своем составе следующие унифицированные модули:
- микропроцессорный модуль управления (ММУ), включающий в себя ИИУ 1, линия передачи информации МКО которого соединена с разъемом 2 для подключения к локальному контроллеру внешней бортовой ЭВМ, объединенные через внутримодульную магистраль МП 3, ОЗУ 4, ПЗУ 5 и УПД 6, а также вновь введенное УВВ 7, входы управления которого соединены с выходами управления МП 3, а информационные входы-выходы соединены с первыми информационными входами-выходами УПД 6, вторые информационные входы-выходы которого соединены с информационными входами-выходами ИИУ 1;
- модуль коммутации нагревателей (МКН), включающий в себя последовательно соединенные ВФ 8 и СК 9, выходы которых соединены с разъемом 10 для подключения к внешним электронагревателям (ЭН), а также вновь введенное УВВ 11, информационные выходы которого соединены с информационными входами ВФ 8, а информационные входы соединены с выходами контроля состояния ВФ 8;
- модуль контроля температур (МКТ), включающий в себя последовательно соединенные ИУ 12, выходы которого соединены с разъемом 13 для подключения к внешним термодатчикам (ДТ), АК 14 и АЦП 15, а также вновь введенное УВВ 16, информационные входы которого соединены с информационными выходами АЦП 15, а выходы управления соединены с входами управления АК 14;
- вновь введенный модуль контроля питания (МКП), включающий в себя СК 17, последовательно соединенные ИУ 18, АК 19 и АЦП 20, а также УВВ 21, информационные входы которого соединены с информационными выходами АЦП 20, первые выходы управления соединены с входами управления АК 19, а вторые выходы управления соединены с входами СК 17, выходы которых соединены с входами ИУ 18 и с разъемом 22 для подключения к шинам питания БА.
Модули МКН, МКТ и МКП по отношению к ММУ являются интерфейсными, порты обмена информацией УВВ 11, УВВ 16, УВВ 21 которых соединены через межмодульную магистраль с портом обмена информации УВВ 7 ММУ.
БУН аппаратуры КА работает следующим образом.
После подачи напряжения питания на БУН сначала происходит начальная инициализация работы ММУ - запускается начальный тест, обеспечивающий проверку работоспособности устройств ММУ, затем после завершения начального теста включается БА через СК 17 и разъем 22 интерфейсного модуля МКП и запускается цикл опроса всех интерфейсных модулей (МКН, МКТ и МКП) с периодом Тц, обеспечивающий в течение времени опроса tоп чтение цифровых параметров, соответствующих текущему состоянию длительности импульсов включения n внешних ЭН, подключаемых через разъем 10, текущим значениям температур в различных точках посадочного места БА на ТП, контролируемых m внешними ДТ через разъем 13, и текущим значениям напряжения питания и тока потребления, контролируемых на шинах питания подключенной БА через разъем 22, и в пределах оставшегося времени Δt=Тц-tоп обработку полученной информации и формирование управляющих воздействий на интерфейсные модули в соответствии с алгоритмами, заложенными в программное обеспечение ММУ.
В ММУ все функции по организации работы БУН, синхронизации взаимодействия его составных частей осуществляет МП 3. Он является основным программно-управляемымым элементом, осуществляющим процесс обработки цифровой информации: генерирует адресные сигналы и управляющие импульсы, необходимые для обращения к ОЗУ 4, ПЗУ 5, УПД 6 и УВВ 7, а также отвечает на запросы прерываний, выполняет необходимые вычислительные операции, производит выборку команд и данных из ПЗУ 5 и данных из ОЗУ 4, производит арифметические и логические операции над данными, осуществляет пересылку данных через УПД 6, а также обеспечивает через УВВ 7 взаимодействие по межмодульной магистрали с интерфейсными модулями МКН, МКТ и МКП. В соответствии с программным обеспечением, заложенным в ПЗУ 5, МП 3 организует работу по нескольким жестким циклам. При обращении МП 3 к ОЗУ 4 происходит запись информации в ячейки памяти ОЗУ 4 или передача информации из ячеек памяти ОЗУ 4, при отсутствии обращения - ячейки памяти ОЗУ 3 находятся в режиме хранения информации. В ПЗУ 5 хранится штатное бортовое программное обеспечение, включающее в себя набор рабочих и контрольных программ и таблицы температурных констант (уставки и граничные значения температур). Обращение к ПЗУ 5 происходит только по сигналу МП 3, поступающему на вход управления дешифратора ПЗУ 5, при этом на шину данных внутримодульной магистрали выводится содержимое выбранной ячейки памяти ПЗУ 5.
Кроме того, в ММУ через разъем 2 производится взаимодействие ИИУ 1, выполняющего функции оконечного устройства в МКО, с локальным контроллером бортовой ЭВМ по линии передачи информации МКО с характеристиками линии передачи информации в соответствии с ГОСТ Р 52070-2003 (MIL-STD-1553В). Обмен информацией осуществляется по принципу команда-ответ с временным разделением сообщений, состоящих из командных, информационных и ответных слов. По МКО через ИИУ 1 передаются команды управления от локального контроллера бортовой ЭВМ, а также цифровая телеметрическая информация (через бортовую ЭВМ) по работе всех модулей. Пересылка данных в ОЗУ 4 или из ОЗУ 4 при обмене по линии передачи информации МКО через ИИУ 1 или при обмене информации по межмодульной магистрали с интерфейсными модулями МКН, МКТ и МКП через порт обмена информации УВВ 7 производится через информационные входы-выходы УПД 6.
В каждом цикле опроса, периодичность Тц которого задается работой таймера (может быть реализован либо в ММУ, либо в МКН с формированием сигнала прерывания для ММУ), в соответствии с заданной временной диаграммой, прошитой в ПЗУ 5, в МКН через УВВ 11 производится опрос выходов контроля состояния ВФ 8, в МКТ через УВВ 16 производится выбор канала измерения АК 14 и после завершения преобразования опрос АЦП 15, и аналогично в МКП через УВВ 21 производится выбор канала измерения АК 19 и после завершения преобразования опрос АЦП 20.
В МКТ величины сопротивлений подключенных через разъем 13 m внешних ДТ, фиксирующих фактические значения текущих температур, преобразуются в ИУ 12, которые могут быть выполнены в виде m одинаковых мостовых схем, в уровень постоянного напряжения. Выходные аналоговые сигналы каждой мостовой схемы ИУ 12 поступает на соответствующие входы АК14, с выхода которого преобразованные и усиленные сигналы поочередно поступают на вход АЦП 15 для преобразования в цифровые температурные параметры. Преобразование производится циклически в опросном режиме. Последовательное переключение m измерительных каналов в АК 14 осуществляется управляющими сигналами, поступающими с выходов управления УВВ 16 на входы управления АК 14. По запросу ММУ текущие значения температур в виде цифровых параметров считывается с выхода АЦП 15 через УВВ 16 по каждому каналу на межмодульную магистраль и поступает в ММУ через УВВ 7 и УПД 6 в ОЗУ 5 для временного хранения и дальнейшей обработки в соответствии с заданными алгоритмами, прошитыми в ПЗУ 4.
Аналогично в МКП текущие величины напряжений питания и токов потребления на шинах питания подключенной БА через разъем 22 преобразуется в ИУ 18, которые могут быть выполнены в виде схем преобразования напряжения в напряжение и тока в напряжение, в уровень постоянного напряжения. Выходные аналоговые сигналы каждой схемы преобразования ИУ 18 поступает на соответствующие входы АК19, с выхода которого преобразованные и усиленные сигналы поочередно поступают на вход АЦП 20 для преобразования в цифровые параметры напряжения и тока. Преобразование производится циклически в опросном режиме. Последовательное переключение измерительных каналов напряжения и тока в АК 19 осуществляется управляющими сигналами, поступающими с выходов управления УВВ 21 на входы управления АК 19. По запросу ММУ текущие значения напряжений и токов в виде цифровых параметров считывается с выхода АЦП 20 через УВВ 21 по каждому каналу на межмодульную магистраль и поступает в ММУ через УВВ 7 и УПД 6 в ОЗУ 5 для временного хранения и дальнейшей обработки в соответствии с заданными алгоритмами, прошитыми в ПЗУ 4.
По результатам обработки цифровых параметров текущих значений температур, контролируемых m-ным количеством ДТ в различных точках посадочного места БА на ТП, а также напряжения питания и тока потребления, контролируемых на шинах питания БА, в ММУ по определенному алгоритму, в зависимости от выбранного метода прецизионной термостабилизации, вычисляются в каждом цикле опроса изменения тепловых потоков в ТП и для компенсации влияния этих изменений на температуру БА формируются скорректированные коды длительности импульсов включения для каждого из n внешних ЭН. Эти коды из ММУ пересылаются по межмодульной магистрали в МКН, в котором через УВВ 11 поступают на ВФ 8, которые обеспечивают формирование соответствующей длительности импульсов и через СК 9 и разъем 10 независимое управление включением каждого ЭН.
Таким образом, в заявленном БУН организация его структуры на основе магистрально-модульного принципа построения позволяет расширить его функциональные возможности, а использование дополнительного унифицированного модуля МКП позволяет осуществить импульсный нагрев n внешних ЭН с использованием временной модуляцией длительности их включения, регулируемой цифровым способом независимо для каждого ЭН, с учетом дополнительной информации о тепловыделении БА, за счет чего достигается очень высокая стабильность поддержания температуры в различных точках посадочного места БА на ТП (так, например, при эксплуатации прибора БКН-Э в составе МСПТ КА «Глонасс-М» получена стабильность не хуже 0,01°C), т.к. фактически в каждый период опроса происходит независимая корректировка длительности нагрева каждого ЭН в соответствии с реальной температурной ситуацией на обогреваемых элементах и реальном тепловыделении БА. В целом это определяет высокую надежность работы БА по температурному режиму.
Данная совокупность признаков, предложенная автором, не была обнаружена при проведении поиска аналогов для решения поставленных задач и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Рассмотренный БУН можно использовать в различных КА, где требуется прецизионная стабилизация температуры посадочного места БА на ТП. Модули предложенного БУН могут быть выполнены на интегральных микросхемах любого типа и степени интеграции, в частности в БКН-Э, используемого в составе МСПТ КА «Глонасс-М», ММУ реализован наказе микропроцессора 1892ВМ8Я, ОЗУ 48S1616RPFK (MAXWELL), ПЗУ 79LV0832RHFK (MAXWELL) и ИИУ на базе ПЛИС (программируемой логической интегральной микросхеме) RSTX32A-CQ208E (ACTEL), МКН реализован на базе дискретных программируемых счетчиков 1526ИЕ15, используемых в ВФ для реализации ШИМ, а в МКТ и МКП схемы ИУ и АК реализованы на базе микросхем 140УД1701А, 1463УБ1У, 1127КН61Т, и АЦП на базе микросхемы 5962R8512701VZA.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| Устройство терморегулирования космического аппарата | 2018 |
|
RU2676596C1 |
| Устройство автоматического регулирования напряжения компенсирующими устройствами и отпайками трехобмоточного трансформатора в центре питания | 1987 |
|
SU1474793A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 2001 |
|
RU2196102C1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| МОДУЛЬ СБОРА ДАННЫХ | 2008 |
|
RU2374683C1 |
| СПОСОБ СТЕГАНОГРАФИЧЕСКОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ ЧЕРЕЗ ГЛАВНЫЙ ОПТИЧЕСКИЙ ТРАКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2496239C1 |
| Аналого-цифровой преобразователь интегральных характеристик напряжений | 1988 |
|
SU1615888A1 |
| РЕГИСТРАТОР АВАРИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ЭНЕРГОСИСТЕМ | 2009 |
|
RU2402067C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
Изобретение относится к автоматической системе обеспечения теплового режима космического аппарата (КА). В блоке управления нагревателями (БУН) аппаратуры КА отдельные функциональные устройства сгруппированы в унифицированные функционально законченные модули - микропроцессорный модуль управления (ММУ), модуль коммутации нагревателей (МКН) и модуль контроля температуры (МКТ), причем ММУ содержит информационное интерфейсное устройство, соединенное с разъемом для подключения к внешней бортовой ЭВМ, объединенные через внутримодульную магистраль микропроцессор, оперативное запоминающее устройство, постоянное запоминающее устройство и устройство приема дискретных данных, и введенное устройство ввода-вывода (УВВ), МКН содержит последовательно соединенные выходные формирователи и силовые ключи (СК), выходы которых соединены с разъемом для подключения к внешним электронагревателям, и введенное УВВ, МКТ содержит последовательно включенные измерительное устройство, входы которого соединены с разъемом для подключения к термодатчикам, аналоговый коммутатор и аналого-цифровой преобразователь (АЦП), и введенное УВВ, причем порты обмена информацией УВВ всех модулей соединены между собой через межмодульную магистраль. В БУН аппаратуры КА введен модуль контроля питания, содержащий СК и последовательно включенные измерительное устройство, аналоговый коммутатор и АЦП, а также подключенное к межмодульной магистрали УВВ, причем выходы СК соединены с входами измерительного устройства и с разъемом для подключения к шинам питания бортовой аппаратуры (БА). Расширяются функциональные возможности БУН, повышается стабильность поддержания температур в различных точках посадочного места БА на термостабилизированной платформе, повышается надежность работы БА. 1 з.п. ф-лы, 1 ил.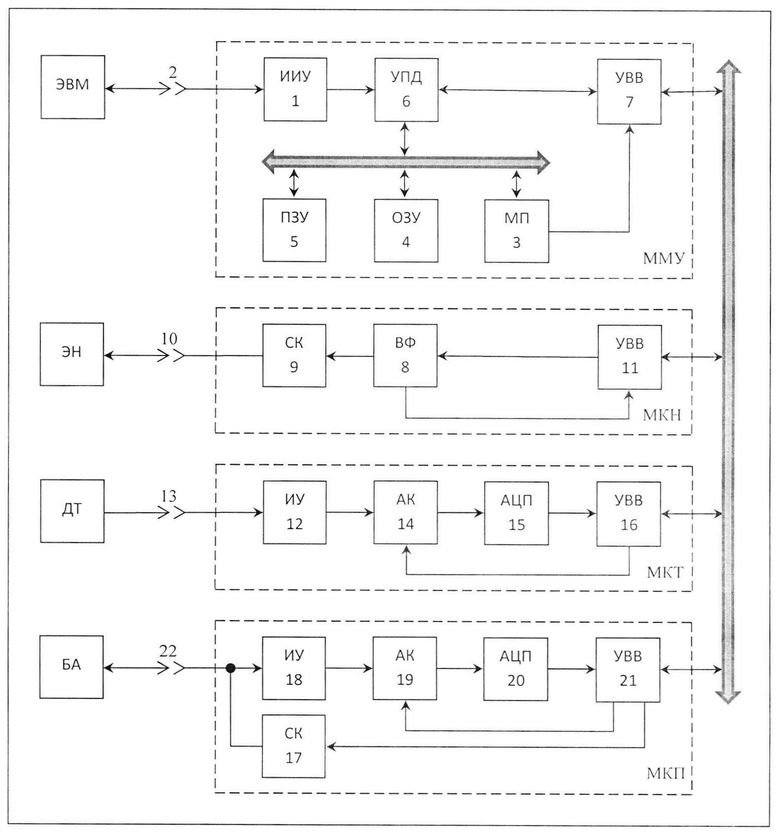
1. Блок управления нагревателями аппаратуры космического аппарата, включающий в себя микропроцессорный модуль управления, модуль коммутации нагревателей и модуль контроля температуры, причем микропроцессорный модуль управления содержит информационное интерфейсное устройство, линия передачи информации мультиплексного канала обмена которого соединена с разъемом для подключения к локальному контроллеру внешней бортовой ЭВМ, и объединенные через внутримодульную магистраль микропроцессор, оперативное запоминающее устройство, постоянное запоминающее устройство и устройство приема дискретных данных, модуль коммутации нагревателей содержит последовательно соединенные выходные формирователи и силовые ключи, выходы которых соединены с разъемом для подключения к внешним электронагревателям, модуль контроля температуры содержит последовательно включенные измерительное устройство, входы которого соединены с разъемом для подключения к термодатчикам, аналоговый коммутатор и аналого-цифровой преобразователь, отличающийся тем, что в микропроцессорный модуль управления введено устройство ввода-вывода, входы управления которого соединены с выходами управления микропроцессора, а информационные входы-выходы соединены с первыми информационными входами-выходами устройства приема дискретных данных, вторые информационные входы-выходы которого соединены с информационными входами-выходами информационного интерфейсного устройства, в модуль коммутации нагревателей введено устройство ввода-вывода, информационные выходы которого соединены с информационными входами выходных формирователей, а информационные входы соединены с выходами контроля состояния выходных формирователей, причем порт обмена информацией устройства ввода-вывода соединен через межмодульную магистраль с портом обмена информацией устройства ввода-вывода микропроцессорного модуля управления, в модуль контроля температуры введено устройство ввода-вывода, информационные входы которого соединены с информационными выходами аналого-цифрового преобразователя, а выходы управления соединены с входами управления аналогового коммутатора, причем порт обмена информацией устройства ввода-вывода соединен через межмодульную магистраль с портом обмена информацией устройства ввода-вывода микропроцессорного модуля управления.
2. Блок управления нагревателями аппаратуры космического аппарата по п. 1, отличающийся тем, что в него введен модуль контроля питания, содержащий силовые ключи и последовательно включенные измерительное устройство, аналоговый коммутатор и аналого-цифровой преобразователь, а также устройство ввода-вывода, информационные входы которого соединены с информационными выходами аналого-цифрового преобразователя, первые выходы управления соединены с входами управления аналогового коммутатора, вторые выходы управления соединены с входами силовых ключей, выходы которых соединены с входами измерительного устройства и с разъемом для подключения к шинам питания бортовой аппаратуры, причем порт обмена информацией устройства ввода-вывода соединен через межмодульную магистраль с портом обмена информацией устройства ввода-вывода микропроцессорного модуля управления.
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| Способ испытания масел для тяжело нагруженных быстроходных зубчатых колес | 1955 |
|
SU106768A1 |
| US 7185825 B1, 06.03.2007. | |||

