Способ относится к испытательной технике и может быть использован при проведении испытаний длинномерного, крупногабаритного объекта испытаний (ОИ) длиной до 7 м и весом до 2 т с текучим содержимым, центр масс которого располагается на центральной оси ОИ.
Техническим результатом предлагаемого способа автоматического совмещения центра масс ОИ с осью вращения ОИ при проведении испытаний на испытательном стенде является уменьшение нагрузок на электродвигатели, обеспечивающие поворот ОИ, при проведении испытаний на испытательном стенде.
Проведенный заявителем поиск по известным патентным и научно-техническим материалам не обнаружил аналогичного решения, пригодного для рассмотрения в качестве прототипа.
Способ автоматического совмещения центра масс объекта испытания (ОИ) с осью вращения объекта испытания при проведении испытаний на испытательном стенде заключается в закреплении ОИ в ложементах испытательного стенда, считывании информации с датчиков весоизмерительных тензорезисторных, вычислении разности сумм дискретных кодов, сравнении значения разности сумм дискретных кодов с пороговыми значениями разности сумм дискретных кодов, задании в зависимости от значения разности сумм дискретных кодов на линейный механизм стенда непрерывного или дискретного принципа перемещения ОИ вдоль оси испытательного стенда до момента совмещения центра масс ОИ с осью вращения ОИ.
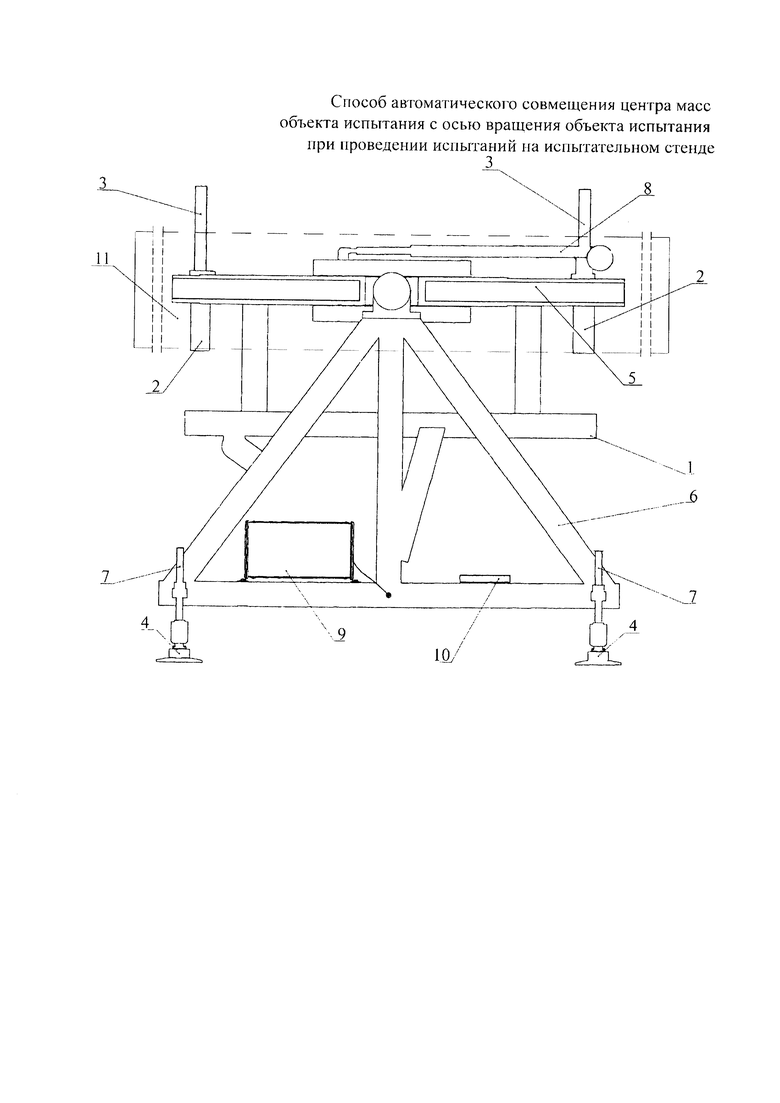
Реализация способа автоматического совмещения центра масс объекта испытания с осью вращения ОИ при проведении испытаний на испытательном стенда показана на чертеже, где изображено:
1) рама испытательного стенда;
2) ложементы;
3) скобы;
4) датчики весоизмерительные тензорезисторные;
5) передвижные каретки;
6) платформа;
7) опоры испытательного стенда;
8) линейный механизм;
9) устройство выдачи управляющих команд на линейный механизм;
10) устройство считывания информации с датчиков весоизмерительных тензорезисторных;
11) объект испытания;
На раму 1 устанавливаются ложементы 2, в скобах 3 которых закрепляется ОИ 11 для вращения относительно собственной центральной оси. К платформе 6, являющейся несущей стационарной частью испытательного стенда, подсоединяются опоры испытательного стенда 7, на которые установлены датчики весоизмерительные тензорезисторные 4. Устройство 9 предназначено для электропитания датчиков весоизмерительных тензорезисторных 4, выдачи управляющих команд на линейный механизм 8, который предназначен для продольного перемещения рамы 1 вместе с ОИ 11. Устройство 10 предназначено для считывания информации с датчиков весоизмерительных тензорезисторных и выдачи команд управления испытательным стендом на электродвигатели согласно приходящей информации с датчиков весоизмерительных тензорезисторных 4.
Мощность электродвигателя, осуществляющего поворот ОИ 11, определяется формулой [Курс общей физики, том I. Механика, колебания и волны, молекулярная физика / И.В. Савельев - М.: Издательство «Наука», Главная редакция физико-математической литературы, 1970 г. - 517 с. (стр. 85)]:

где Р - мощность двигателя;
Мдвиг - момент сил двигателя;
ωдвиг - установившаяся скорость двигателя.
Момент сил электродвигателя определяется формулой [Курсовое проектирование деталей машин: Учеб. пособие для учащихся машиностроительных специальных техникумов / С.А. Чернавский, К.Н. Боков, И.М. Чернин и др. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1988. - 416 с.: ил. (стр. 386)]:

где Мов - момент сил, приложенный к оси вращения ОИ;
η - КПД двигателя;
n - передаточное соотношение редуктора.
Момент сил, приложенных к оси вращения ОИ 11, определяется формулой [Физика: Учебное пособие. А.Д. Ивлиев - СПб.: Издательство «Лань», 2008. - 672 с.: ил. - (Учебник для вузов. Специальная литература) (стр. 43)]:

где Jов - динамический момент инерции, приложенный к оси вращения ОИ;
ar - радиальное ускорение;
Мст - статический момент, приложенный к оси вращения ОИ.
Статический момент в точке оси вращения ОИ 11 определяется формулой [Курс общей физики, том I. Механика, колебания и волны, молекулярная физика / И.В. Савельев - М.: Издательство «Наука», Главная редакция физико-математической литературы, 1970 г. - 517 с. (стр. 130)]:

где m - масса ОИ;
g - ускорение свободного падения;
d - длина плеча от центра масс ОИ до оси вращения ОИ.
Динамический момент инерции, приложенный к оси вращения ОИ 11, определяется формулой [Физика: Учебное пособие. А.Д. Ивлиев - СПб.: Издательство «Лань», 2008. - 672 с.: ил. - (Учебник для вузов. Специальная литература) (стр. 45)]:

где, Jцм - момент инерции, приложенный к центру масс ОИ.
Так как все величины, кроме длины плеча от центра масс ОИ 11 до оси вращения ОИ 11 d, являются заданными, то для уменьшения значения необходимой мощности электродвигателя, задействованного для поворота ОИ 11, необходимо минимизировать значение длины плеча от центра масс ОИ 11 до оси вращения ОИ d. Это достигается путем совмещения центра масс ОИ 11 с осью вращения ОИ 11, при этом значение длины плеча от центра масс ОИ 11 до оси вращения ОИ 11 будет бесконечно малым, т.е. d стремится к нулю.
Совмещение центра масс ОИ 11 с осью вращения ОИ 11 обеспечивает снижение не только нагрузок на электродвигатель при проведении испытаний, но и массогабаритных характеристик испытательного стенда.
После закрепления ОИ 11 на ложементах 2 стенда с помощью скоб 3, автоматическое совмещение центра масс ОИ 11 с осью вращения ОИ 11 осуществляется следующим образом: устройство 10 считывает с тензорезисторных весоизмерительных датчиков 4 сигналы, соответствующие значению давления опор 7 на грунт. По формуле (6) вычисляется разность сумм дискретных кодов:

где dN - разность сумм дискретных кодов;
N11 - значение с переднего левого тензорезисторного весоизмерительного датчика;
N12 - значение с переднего правого тензорезисторного весоизмерительного датчика;
N21 - значение с заднего левого тензорезисторного весоизмерительного датчика;
N22 - значение с заднего правого тензорезисторного весоизмерительного датчика.
Передвижные каретки 5 обеспечивают передвижение ОИ 11 вдоль горизонтальной оси. При данном передвижении, текучее содержимое ОИ 11 колеблется, смещая при этом центр масс ОИ 11, что существенно усложняет процесс нахождения центра масс ОИ 11, так как значения с тензорезисторных весоизмерительных датчиков непрерывно меняются до момента установления текучего содержимого ОИ 11 в состояние покоя. Так как ОИ 11 является крупногабаритным, то осуществлять движение дискретно постоянно, дожидаясь пока текучее содержимое установится в состояние покоя, для точного определения значения разности сумм дискретных кодов dN, нерационально. В связи с этим используются два диапазона значений разности сумм дискретных кодов dN, задающее принцип перемещения ОИ 11 для совмещения центра масс ОИ 11 с осью вращения ОИ 11: непрерывное или дискретное перемещение ОИ 11 вдоль горизонтальной оси испытательного стенда. Диапазоны значений разности сумм дискретных кодов dN определяются пороговыми значениями разности сумм дискретных кодов dNпор1 и dNпор2, при этом абсолютное значение |dNпор1| больше |dNпор2|. Пороговое значение разности сумм дискретных кодов dNпор1 задается для грубого поиска центра масс ОИ 11. Пороговое значение разности сумм дискретных кодов dNпор2 задается для точного совмещения центра масс ОИ 11 с осью вращения ОИ 11.
Значения N11, N12, N21, N22 с тензорезисторных весоизмерительных датчиков 4 в устройство выдачи управляющих команд 9 поступают непрерывно. Сравнение значения разности сумм дискретных кодов dN с пороговыми значениями разности сумм дискретных кодов dNпор1,2 происходит в устройстве 9.
На первом этапе автоматического совмещения центра масс ОИ с осью вращения ОИ 11 происходит непрерывное движение ОИ 11 вдоль горизонтальной оси, пока не будет выполнено условие:

В данном случае устройство 9 передает управляющий сигнал на линейный механизм 8, который осуществляет непрерывное перемещение ОИ в горизонтальной оси, параллельной центральной оси ОИ, при dN больше нуля - перемещение ОИ 11 происходит вперед, при dN меньше нуля - назад.
На втором этапе после выполнения условия (7) происходит дискретное перемещение ОИ 11 вдоль горизонтальной оси, пока не будет выполнено условие:

Устройство 9 передает управляющий сигнал на линейный механизм 8, который осуществляет дискретное перемещение ОИ в горизонтальной оси, параллельной с центральной осью ОИ 11. Управляющий сигнал в данном случае передается импульсно. Дискретное передвижении ОИ 11 необходимо для уменьшения влияния колебания текучего содержимого ОИ 11 на определение значения разности сумм дискретных кодов dN, так как во время паузы текучее содержимое ОИ устанавливается в состояние покоя и значение разности сумм дискретных кодов dN определяется с наименьшей погрешностью. В связи с этим длительность импульса управляющего сигнала выбирается меньше величины паузы.
При выполнении условия (8) центр масс ОИ 11 совмещен с осью вращения ОИ 11 и устройство 9 прекращает передачу управляющего сигнала на линейный механизм 8.
Благодаря совмещению центра масс ОИ с осью вращения ОИ существенно уменьшается мощность электродвигателей, обеспечивающих поворот ОИ по крену и тангажу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ испытания технологических модулей глубоководных аппаратов на внутреннее давление посредством стенда для испытания технологических модулей глубоководных аппаратов на внутреннее давление | 2022 |
|
RU2788819C1 |
| Стенд для измерения нагрузок, воздействующих на объект авиационной техники | 2017 |
|
RU2651627C1 |
| Стенд для испытания тормозных механизмов | 1987 |
|
SU1464054A1 |
| Стенд для испытания шахтных вагонеток | 1981 |
|
SU991228A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ГРУПП ОБРАЗЦОВ ПРИ ЦИКЛИЧЕСКОМ ИЗГИБЕ | 2012 |
|
RU2515188C2 |
| Автоматический стенд для динамических испытаний передач | 1985 |
|
SU1335831A1 |
| Способ испытаний судовых движительных комплексов и стенд для его осуществления | 2023 |
|
RU2817909C1 |
| СПОСОБ ИСПЫТАНИЙ УЗЛОВ ТРЕНИЯ | 2006 |
|
RU2343450C2 |
| Стенд для испытания рычажно-лопастных гидроамортизаторов | 2022 |
|
RU2779327C1 |
Способ относится к испытательной технике. При установке объекта испытания (далее по текста ОИ) на испытательный стенд четыре тензорезисторных весоизмерительных датчика передают сигналы давления опор в устройство считывания информации с датчиков весоизмерительных тензорезисторных, где вычисляется разность сумм дискретных кодов. Устройство выдачи управляющих команд на линейный механизм выдает управляющие сигналы на линейный механизм, перемещающий непрерывно или дискретно, в зависимости от значения разности сумм дискретных кодов, подвижную каретку вдоль центральной оси ОИ. В результате происходит автоматическое совмещение центра масс ОИ с осью вращения ОИ. Технический результат заключается в упрощении конструкции, уменьшении массогабаритных характеристик, уменьшении нагрузок на электродвигатели при проведении испытаний. 1 ил. 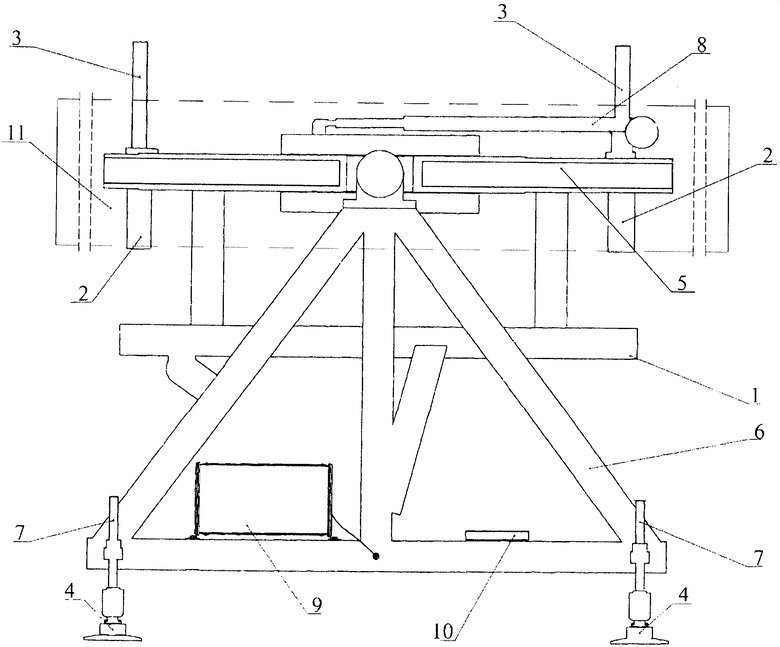
Способ автоматического совмещения центра масс объекта испытания (ОИ) с осью вращения объекта испытания при проведении испытаний на испытательном стенде, заключающийся в закреплении ОИ в ложементах испытательного стенда, считывании информации с датчиков весоизмерительных тензорезисторных, вычислении разности сумм дискретных кодов, сравнении значения разности сумм дискретных кодов с пороговыми значениями разности сумм дискретных кодов, задании в зависимости от значения разности сумм дискретных кодов на линейный механизм стенда сначала непрерывного, затем дискретного принципа перемещения ОИ вдоль оси испытательного стенда до момента совмещения центра масс ОИ с осью вращения ОИ.
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |

