Область техники
Настоящее изобретение относится к области автоматизации сельскохозяйственных машин, в частности, относится к способу определения пространственного положения транспортного средства на базе GNSS-INS (Global Navigation Satellite Systems (глобальной навигационной спутниковой системы) и Inertial Navigation System (инерциальной навигационной системы)) с использованием одиночной антенны.
Уровень техники
С развитием современных технологий и достижений в области биотехнологии, технологии GNSS и информационных технологий наблюдается широкое применение современных технологий в сельском хозяйстве, что ведет к появлению точного земледелия. В качестве основы точного земледелия автоматическая система управления сельскохозяйственными машинами имеет большое значение для различных сельскохозяйственных задач, включая сельское хозяйство, посев, оплодотворение, орошение, защиту растений, сбор урожая и т.п.
Для повышения точности автоматической системы управления сельскохозяйственным транспортным средством необходимо измерять точность навигации по координатам сельскохозяйственного транспортного средства, курсовой угол и угол пространственного положения, поэтому значения измерений должны быть максимально точными. В частности, когда сельскохозяйственное транспортное средство, оборудованное приемниками GNSS, движется по полям, приемная антенна GNSS наклоняется вследствие вибраций корпуса транспортного средства, происходящих из-за неравномерного усилия, прилагаемого к шинам со стороны почвы. В результате антенна GNSS не совпадает с центром масс корпуса транспортного средства, так что необходимы точные углы пространственного положения и курсовые углы корпуса транспортного средства.
В настоящее время часто применяют способ измерения пространственных положений на основе GNSS с несколькими антеннами. Однако данный способ обладает такими недостатками как высокая стоимость, задержка приема антенны, слабые технические характеристики в режиме реального времени и сложность установки. Что касается инерциальной навигационной системы, INS, используемой в наземной навигационной системе для определения пространственного положения, она не применима для определения пространственного положения сельскохозяйственного транспортного средства вследствие высокой стоимости и т.п.
Раскрытие сущности изобретения
Ввиду вышеупомянутых недостатков в области автоматизации сельскохозяйственных транспортных средств, настоящее изобретение обеспечивает способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны, посредством которого можно выполнять определение пространственного положения транспортного средства с помощью одиночной антенны и улучшить точность определения пространственного положения.
Чтобы выполнить указанную задачу, в варианте реализации настоящего изобретения использованы следующие технические решения:
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны, причем способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны включает следующие этапы:
установку антенны GNSS в центре масс и в центре транспортного средства и установку измерительного блока инерциальной системы IMU (Inertial Measurement Unit, инерциальный измерительный блок) датчика на основе MEMS (Micro-Electro-Mechanical-System, микроэлектромеханическая система) на валу рулевого механизма транспортного средства;
получение данных о положении и скорости транспортного средства с помощью антенны GNSS, получение данных о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
вычисление угла пространственного положения транспортного средства с помощью комбинирования акселерометра и гироскопа;
вычисление курсового угла транспортного средства на основе данных о положении, скорости и курсовой угловой скорости транспортного средства.
В соответствии с одним аспектом настоящего изобретения, когда измерительный блок IMU датчика на основе MEMS закреплен на валу рулевого механизма транспортного средства, пространственные координаты измерительного блока IUM согласуются с пространственными координатами транспортного средства.
В соответствии с одним аспектом настоящего изобретения, этап вычисления угла пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа включает:
когда транспортное средство неподвижно или движется равномерно, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(ах)
 ,
,
где ах, ау - ускорения по оси X и оси Y системы координат ходовой части; θ - угол продольного наклона; и ∅ - угол бокового наклона;
когда транспортное средство быстро перемещается или сильно вибрирует, вводят гироскоп для вычисления угла пространственного положения с помощью комбинирования акселерометра и гироскопа, и для этого выполняют следующие конкретные этапы:
вначале создают комбинационный фильтр угла бокового наклона и угла продольного наклона, при этом комбинационный фильтр имеет следующий вид:
 ,
,
где оцениваемые параметры имеют следующий вид:
 ,
,
вектор наблюдений имеет вид:
 ,
,
где bfx,y и bωibx,y,z - соответствующие выходные данные акселерометра и гироскопа;
матрица переходов из состояния в состояние имеет следующий вид:
 ,
,
матрица плана наблюдений имеет вид:
 ,
,
вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
В соответствии с одним аспектом настоящего изобретения, этап вычисления угла пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа включает:
когда транспортное средство неподвижно или движется равномерно, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(ах)
 ,
,
где ах, ау - ускорения по оси X и оси Y системы координат ходовой части; θ - угол продольного наклона; и ∅ - угол бокового наклона;
когда транспортное средство быстро перемещается или сильно вибрирует, вводят гироскоп для вычисления угла пространственного положения с помощью комбинирования акселерометра и гироскопа, и для этого выполняют следующие конкретные этапы:
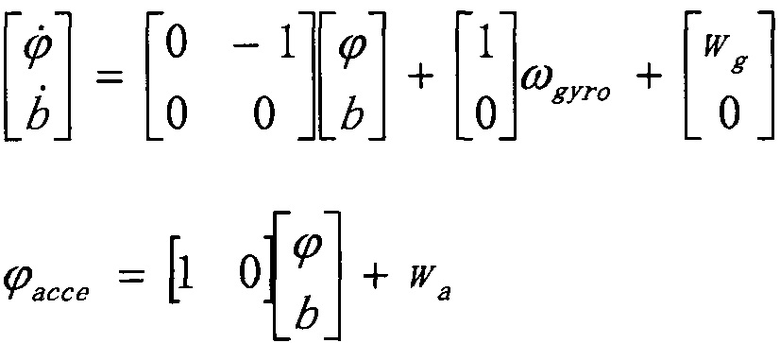
поскольку угол наклона (угол бокового наклона или угол продольного наклона) и угловая скорость наклона имеют производное отношение, фактический угол наклона ϕ системы используют в качестве вектора состояния, постоянное отклонение b гироскопа оценивают с помощью акселерометра, и отклонение b используют в качестве другого вектора состояния для получения уравнения состояния и уравнения наблюдений:
где ωgyro выходное значение угловой скорости от гироскопа, причем угловая скорость включает в себя постоянное отклонение, ϕассе - значение угла, обрабатываемого акселерометром, wg - шум измеренной величины от гироскопа, wa - шум измеренной величины от акселерометра, b - ошибка из-за ухода параметров гироскопа, причем wg и wa являются независимыми друг от друга, и предполагается, что обе величины являются белыми шумами, которые удовлетворяют нормальному распределению; при установлении ковариационной матрицы Q шума системного процесса фильтра Калмана и ковариационной матрицы R ошибки измерений формулы ковариационной матрицы Q и ковариационной матрицы R имеют следующий вид:

где q_ассе и q_gyro - соответственно ковариантность акселерометра и гироскопа; r_ассе - шум измеренной величины от акселерометра;
вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
В соответствии с одним аспектом настоящего изобретения этап вычисления курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства включает:
получение курсового угла путем вычисления направленной на восток и направленной на север скорости, при этом формула для получения курсового угла выглядит как
ψp=arctan(vE/vN),
где ψр - курсовой угол GNSS, vE, vN - соответственно направленная на восток скорость и направленная на север скорость;
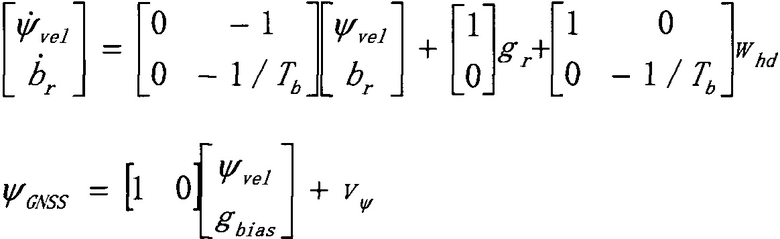
когда транспортное средство неподвижно или перемещается с очень низкой скоростью, для точного вычисления курсового угла вводят комбинацию гироскопа оси Z и GNSS, и система уравнений и уравнение наблюдений выглядит следующим образом:

где ψGNSS - выходное значение курсового угла от GNSS, br - ошибка из-за ухода параметров гироскопа, whd - шум процесса прокладки курса, Tb - марковское время корреляции первого порядка;
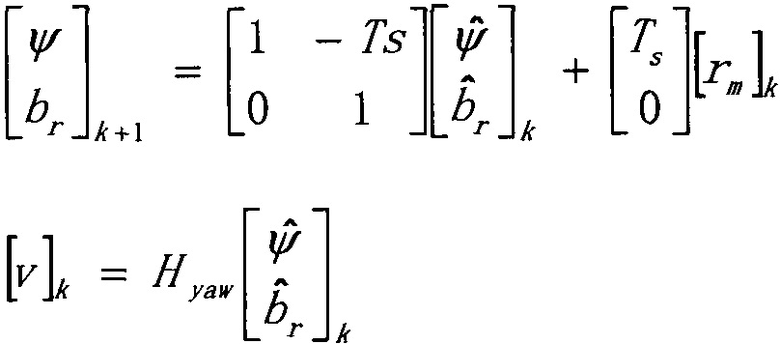
после линеаризации формулы имеют следующий вид:
когда транспортное средство движется,  , в противном случае
, в противном случае  .
.
В соответствии с одним аспектом настоящего изобретения датчик на основе MEMS представляет собой датчик на основе MEMS по шести осям.
Обеспечены следующие преимущества от реализации настоящего изобретения: способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны согласно настоящему изобретению включает следующие этапы: установку антенны GNSS в центре масс и в центре транспортного средства, и установку измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства; получение информации о положении и скорости транспортного средства с помощью антенны GNSS, получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU; вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа; вычисление курсового угла транспортного средства в соответствии с положением, скоростью и курсовой угловой скоростью транспортного средства. Посредством комбинации одиночной антенны GNSS и недорогого датчика на основе IMU/MEMS, пространственная положение и ориентация могут быть определены на кинематической модели сельскохозяйственного транспортного средства. Способ объединяет преимущества кратковременной высокой точности гироскопа IMU и долговременной высокой стабильности одиночной антенны GNSS таким образом, чтобы избежать отклонения, которое возникает при использовании гироскопа, и снизить уровень шума при определении пространственного положения на основе GNSS. Следовательно, точность определения пространственного положения может быть увеличена в несколько раз.
Осуществления изобретения
Технические решения в вариантах реализации настоящего изобретения будут ясно и полностью описаны со ссылкой на прилагаемые чертежи в вариантах реализации настоящего изобретения. Очевидно, описываемые варианты реализации являются только некоторыми вариантами реализации настоящего изобретения и не должны рассматриваться как исчерпывающие. На основе вариантов реализации настоящего изобретения другие варианты реализации, выполненные специалистом в данной области без творческой работы, подпадают под объем действия настоящего изобретения.
Вариант реализации 1
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны, причем способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны включает следующие этапы:
Этап S1: установка антенны GNSS в центре масс и в центре транспортного средства, и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
На этапе S1 конкретное выполнение установки антенны GNSS в центре масс и в центре транспортного средства и установки измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства заключается в следующем: антенну GNSS монтируют в центре масс и в центре транспортного средства для точного измерения положения и скорости ходовой части транспортного средства. Когда измерительный блок IMU датчика на основе MEMS закреплен на ходовой части транспортного средства, пространственные координаты измерительного блока IMU согласуются с пространственными координатами транспортного средства. В то же время, когда управляют колесами транспортного средства, измерительный блок IMU должен быть управляемым в режиме реального времени. То есть, измерительный блок IMU смонтирован на валу транспортного средства, чтобы сделать измерительный блок IMU максимально восприимчивым к курсовой угловой скорости транспортного средства, так что воспринимаемая курсовая информация от IMU согласуется с измеряемой курсовой информацией от GNSS.
Этап S2: получение информации о положении и скорости транспортного средства с помощью антенны GNSS, получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
На этапе S2 информацию о положении и скорости транспортного средства получают с помощью антенны GNSS, а информацию о курсовой угловой скорости транспортного средства получают с помощью измерительного блока IMU. Интегрированный датчик по шести осям (3+3) на основе MEMS-IMU используют для получения информации о курсовой угловой скорости транспортного средства с высокой точностью.
Этап S3: вычисление угла пространственного положения транспортного средства с помощью комбинирования акселерометра и гироскопа;
На этапе S3 вычисляют угол пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа и конкретно включают следующие этапы:
Поскольку точность измерения гироскопа на основе MEMS-IMU не восприимчива к угловой скорости вращения Земли, система на основе MEMS не может быть полностью самовыравнивающейся. Когда транспортное средство неподвижно или равномерно движется, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(ax)
 .
.
В формулах ах, ау обозначают ускорения по оси x и оси у системы координат ходовой части; θ обозначает угол продольного наклона; и ∅ обозначает угол бокового наклона.
Когда транспортное средство перемещается быстро или сильно вибрирует вследствие влияний ускорений от других направлений, угол пространственного положения не может быть вычислен с использованием приведенных выше формул. Тогда вводят гироскоп для выполнения вычислений с помощью комбинирования акселерометра и гироскопа, и конкретными этапами будут следующие:
Вначале создают комбинационный фильтр угла бокового наклона и угла продольного наклона, при этом комбинационный фильтр имеет следующий вид:
При этом оцениваемые параметры должны быть следующими:

Вектор наблюдений имеет вид:
 .
.
Где bfx,y и bωibx,y,z - соответствующие выходные данные акселерометра и гироскопа.
Матрица переходов из состояния в состояние имеет следующий вид:
 .
.
Матрица плана наблюдений имеет вид:

Вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
Этап S4: вычисление курсового угла транспортного средства на основе данных о положении, скорости и курсовой угловой скорости транспортного средства.
На этапе S4 курсовой угол транспортного средства вычисляют на базе положения, скорости и курсовой угловой скорости транспортного средства, и этап конкретно включает:
Определение пространственного положения с помощью одиночной антенны с использованием скорости GNSS и получение курсового угла транспортного средства путем вычисления направленной на восток скорости и направленной на север скорости, а именно:
ψр=arctan(vE/vN).
В данной формуле ψр обозначает курсовой угол GNSS, vE, vN - соответственно направленная на восток скорость и направленная на север скорость.
В конкретных вариантах применения курсовой угол GNSS может быть получен прямо из выходных предложений текстового протокола NMEA (National Marine Electronics Association, Национальная ассоциация морской электроники) от приемника GNSS. Однако когда транспортное средство неподвижно или движется с очень малой скоростью, численные значения математически неустойчивы, и ошибки измерений скорости могут превосходить фактические значения скорости.
Для увеличения курсовой точности применяют комбинирование гироскопа оси Z и GNSS. Гироскоп монтируют по оси Z системы координат ходовой части. Уравнение системы и уравнение наблюдений выглядят следующим образом:

В формулах ψGNSS обозначает выходное значение курсового угла GNSS, br обозначает ошибку из-за ухода параметров гироскопа, whd обозначает шум процесса прокладки курса, Tb обозначает марковское время корреляции первого порядка.
После линеаризации формулы имеют следующий вид:
 .
.
когда транспортное средство движется,  , в противном случае
, в противном случае  .
.
Наконец, определение пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны выполняют путем вычисления угла пространственного положения транспортного средства и курсового угла.
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны согласно настоящему изобретению включает следующие этапы:
установка антенны GNSS в центре масс и в центре транспортного средства, и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
получение информации о положении и скорости транспортного средства с помощью антенны GNSS, и получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа;
вычисление курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства.
Посредством комбинации одиночной антенны GNSS и датчика на основе IMU/MEMS небольшой стоимости пространственное положение и направление могут быть определены на базе кинематической модели сельскохозяйственного транспортного средства. Способ объединяет преимущества кратковременной высокой точности гироскопа IMU и долговременной высокой стабильности одиночной антенны GNSS таким образом, чтобы избежать отклонения, которое возникает при использовании гироскопа, и снизить уровень шума при определении пространственного положения на основе GNSS. Следовательно, точность определения пространственного положения может быть увеличена в несколько раз. Датчик IMU используют в способе определения пространственного положения, описанном в настоящем изобретении, при этом ошибка курсового угла меньше, чем 0,2°, а ошибка угла продольного наклона и ошибка угла бокового наклона меньше, чем 0,08°. При практическом применении используют датчик IMU по шести осям (3+3). Интегрированный датчик по шести осям (3+3) IMU имеет малый размер и вес, является экономичным и модульным и, следовательно, может быть интегрирован во вспомогательную систему управления вождением сельскохозяйственной машины.
При практическом применении для достижения решения определения пространственного положения вместо датчика IMU можно также использовать датчик наклона.
Вариант реализации 2
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны, причем способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны включает следующие этапы:
Этап S1: установка антенны GNSS в центре масс и в центре транспортного средства, и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
На этапе S1 конкретное выполнение установки антенны GNSS в центре масс и в центре транспортного средства и установки измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства заключается в следующем: антенну GNSS монтируют в центре масс и в центре транспортного средства для точного измерения положения и скорости ходовой части транспортного средства. Когда измерительный блок IMU датчика на основе MEMS закреплен на ходовой части транспортного средства, пространственные координаты измерительного блока IMU согласуются с пространственными координатами транспортного средства. В то же время, когда управляют колесами транспортного средства, измерительный блок IMU должен быть управляемым в режиме реального времени. То есть, измерительный блок IMU смонтирован на валу транспортного средства, чтобы сделать измерительный блок IMU максимально восприимчивым к курсовой угловой скорости транспортного средства, так что воспринимаемая курсовая информация от IMU согласуется с измеряемой курсовой информацией от GNSS.
Этап S2: получение информации о положении и скорости транспортного средства с помощью антенны GNSS, получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
На этапе S2 информацию о положении и скорости транспортного средства получают с помощью антенны GNSS, а информацию о курсовой угловой скорости транспортного средства получают с помощью измерительного блока IMU. Интегрированный датчик по шести осям (3+3) на основе MEMS-IMU используют для получения информации о курсовой угловой скорости транспортного средства с высокой точностью.
Этап S3: вычисление угла пространственного положения транспортного средства с помощью комбинирования акселерометра и гироскопа;
На этапе S3 вычисляют угол пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа и конкретно включают следующие этапы:
Поскольку точность измерения гироскопа на основе MEMS-IMU не восприимчива к угловой скорости вращения Земли, система на основе MEMS не может быть полностью самовыравнивающейся. Когда транспортное средство неподвижно или движется равномерно, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(ах)
В формулах ax, ау обозначают ускорения по оси х и оси у системы координат ходовой части; θ обозначает угол продольного наклона; и ∅ обозначает угол бокового наклона.
Когда транспортное средство перемещается быстро или сильно вибрирует вследствие влияний ускорений от других направлений, угол пространственного положения не может быть вычислен с использованием приведенных выше формул. Тогда вводят гироскоп для выполнения вычислений с помощью комбинирования акселерометра и гироскопа, и конкретными этапами будут следующие:
Поскольку угол наклона (угол бокового наклона или угол продольного наклона) и угловая скорость наклона имеют производное отношение, фактический угол наклона ϕ системы может быть использован в качестве вектора состояния. Постоянное отклонение b гироскопа оценивают с помощью акселерометра, и отклонение b используют в качестве другого вектора состояния для получения соответствующего уравнения состояния и уравнения наблюдений:


В формулах ωgyro обозначает выходное значение угловой скорости от гироскопа, при этом угловая скорость включает постоянное отклонение, ϕассе обозначает значение угла, обрабатываемого акселерометром, wg обозначает шум измерений от гироскопа, wa обозначает шум измеренной величины от акселерометра, b означает ошибку из-за ухода параметров гироскопа, wg и wa являются независимыми друг от друга, и предполагается, что обе величины являются белым шумом, который удовлетворяет нормальному распределению. В то же время устанавливают ковариационную матрицу Q шума системного процесса фильтра Калмана и ковариационную матрицу R ошибки измерений, и формулы имеют такой вид:
В формулах q_ассе и q_gyro представляют собой соответственно ковариантность акселерометра и гироскопа; r_ассе - шум измерений от акселерометра.
Вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
Этап S4: вычисление курсового угла транспортного средства на основе данных о положении, скорости и курсовой угловой скорости транспортного средства.
На этапе S4 курсовой угол транспортного средства вычисляют на базе положения, скорости и курсовой угловой скорости транспортного средства, и этап конкретно включает:
Определение пространственного положения с помощью одиночной антенны с использованием скорости GNSS, и получение курсового угла транспортного средства путем вычисления направленной на восток скорости и направленной на север скорости, а именно:
ψр=arctan(vE/vN).
В данной формуле ψр обозначает курсовой угол GNSS, vE, vN - соответственно направленная на восток скорость и направленная на север скорость.
В конкретных вариантах применения курсовой угол GNSS может быть получен прямо из выходных предложений текстового протокола NMEA (National Marine Electronics Association, Национальная ассоциация морской электроники) от приемника GNSS. Однако когда транспортное средство неподвижно или движется с очень малой скоростью, численные значения математически неустойчивы, и ошибки измерений скорости могут превосходить фактические значения скорости.
Для увеличения курсовой точности применяют комбинирование гироскопа оси Z и GNSS. Гироскоп монтируют по оси Z системы координат ходовой части. Уравнение системы и уравнение наблюдений выглядят следующим образом:

В формулах ψGNSS обозначает выходное значение курсового угла GNSS, br обозначает ошибку из-за ухода параметров гироскопа, whd обозначает шум процесса прокладки курса, Tb обозначает марковское время корреляции первого порядка.
После линеаризации формулы имеют следующий вид:
Когда транспортное средство движется, , в противном случае .
Наконец, определение пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны выполняют путем вычисления угла пространственного положения транспортного средства и курсового угла.
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны согласно настоящему изобретению включает следующие этапы:
установка антенны GNSS в центре масс и в центре транспортного средства, и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
получение информации о положении и скорости транспортного средства с помощью антенны GNSS и получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа;
вычисление курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства.
Посредством комбинации одиночной антенны GNSS и датчика на основе IMU/MEMS небольшой стоимости пространственное положение и направление могут быть определены на базе кинематической модели сельскохозяйственного транспортного средства. Способ объединяет преимущества кратковременной высокой точности гироскопа IMU и долговременной высокой стабильности одиночной антенны GNSS таким образом, чтобы избежать отклонения, которое возникает при использовании гироскопа, и снизить уровень шума при определении пространственного положения на основе GNSS. Следовательно, точность определения пространственного положения может быть увеличена в несколько раз. Датчик IMU используют в способе определения пространственного положения, описанном в настоящем изобретении, при этом ошибка курсового угла меньше, чем 0,2°, а ошибка угла продольного наклона и ошибка угла бокового наклона меньше, чем 0,08°. При практическом применении используют датчик IMU по шести осям (3+3). Интегрированный датчик по шести осям (3+3) IMU имеет малый размер и вес, является экономичным и модульным и, следовательно, может быть интегрирован во вспомогательную систему управления вождением сельскохозяйственной машины.
При практическом применении для достижения решения определения пространственного положения вместо датчика IMU можно также использовать датчик наклона.
Обеспечены следующие преимущества от реализации настоящего изобретения:
Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны согласно настоящему изобретению включает следующие этапы:
установка антенны GNSS в центре масс и в центре транспортного средства и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
получение информации о положении и скорости транспортного средства с помощью антенны GNSS, и
получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа;
вычисление курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства.
Посредством комбинации одиночной антенны GNSS и датчика на основе IMU/MEMS небольшой стоимости пространственное положение и направление могут быть определены на базе кинематической модели сельскохозяйственного транспортного средства. Способ объединяет преимущества кратковременной высокой точности гироскопа IMU и долговременной высокой стабильности одиночной антенны GNSS таким образом, чтобы избежать отклонения, которое возникает при использовании гироскопа, и снизить уровень шума при определении пространственного положения на основе GNSS. Следовательно, точность определения пространственного положения может быть увеличена в несколько раз. Датчик IMU используют в способе определения пространственного положения, описанном в настоящем изобретении, при этом ошибка курсового угла меньше, чем 0,2°, а ошибка угла продольного наклона и ошибка угла бокового наклона меньше, чем 0,08°. При практическом применении используют датчик IMU по шести осям (3+3). Интегрированный датчик по шести осям (3+3) IMU имеет малый размер и вес, является экономичным и модульным и, следовательно, может быть интегрирован во вспомогательную систему управления вождением сельскохозяйственной машины.
Приведенное выше описание относится только к конкретным вариантам реализации настоящего изобретения, и не должно рассматриваться как ограничивающее объем настоящего изобретения. Различные изменения или замены в пределах объема настоящего изобретения, которые могут быть легко выполнены специалистом в данной области, будут подпадать под объем действия настоящего изобретения. Таким образом, объем настоящего изобретения должен определяться объемом формулы изобретения.
Изобретение относится к области автоматизации сельскохозяйственных машин, в частности относится к способу определения пространственного положения транспортного средства на базе GNSS-INS (Global Navigation Satellite Systems (глобальной навигационной спутниковой системы) и Inertial Navigation System (инерциальной навигационной системы)) с использованием одиночной антенны. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны включает этапы: установку антенны GNSS в центре масс и в центре транспортного средства и установку измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства; получение информации о положении и скорости транспортного средства с помощью антенны GNSS, получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU; вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа; вычисление курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства. Посредством комбинации одиночной антенны GNSS и датчика на основе IMU/MEMS небольшой стоимости пространственное положение и направление могут быть определены на базе кинематической модели сельскохозяйственного транспортного средства. Способ объединяет преимущества кратковременной высокой точности гироскопа IMU и долговременной высокой стабильности одиночной антенны GNSS таким образом, чтобы избежать отклонения, которое возникает при использовании гироскопа, и снизить уровень шума при определении пространственного положения на основе GNSS. Техническим результатом заявленного изобретения является повышение точности определения пространственного положения сельскохозяйственного транспортного средства. 5 з.п. ф-лы.
1. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны, отличающийся тем, что он включает следующие этапы:
установка антенны GNSS в центре масс и в центре транспортного средства и установка измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства;
получение данных о положении и скорости транспортного средства с помощью антенны GNSS, получение данных о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU;
вычисление угла пространственного положения транспортного средства с помощью комбинирования акселерометра и гироскопа;
вычисление курсового угла транспортного средства на основе данных о положении, скорости и курсовой угловой скорости транспортного средства.
2. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны по п. 1, в котором, когда измерительный блок IMU датчика на основе MEMS закреплен на валу рулевого механизма транспортного средства, пространственные координаты измерительного блока IUM согласованы с пространственными координатами транспортного средства.
3. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны по п. 1, в котором этап вычисления угла пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа включает:
когда транспортное средство неподвижно или движется равномерно, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(аx)
где ах, ау - ускорения по оси X и оси Y системы координат ходовой части; θ - угол продольного наклона; и φ - угол бокового наклона;
когда транспортное средство быстро перемещается или сильно вибрирует, вводят гироскоп для вычисления угла пространственного положения с помощью комбинирования акселерометра и гироскопа, и для этого выполняют следующие конкретные этапы:
вначале создают комбинационный фильтр угла бокового наклона и угла продольного наклона, при этом комбинационный фильтр имеет следующий вид:
где оцениваемые параметры имеют следующий вид:
x(t) = [θ φ ωx ωy ωz]T,
вектор наблюдений имеет вид:

где  и
и  - соответствующие выходные данные акселерометра и гироскопа;
- соответствующие выходные данные акселерометра и гироскопа;
матрица переходов из состояния в состояние имеет следующий вид:
матрица плана наблюдений имеет вид:

причем вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
4. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны по п. 1, в котором этап вычисления угла пространственного положения транспортного средства путем комбинирования акселерометра и гироскопа включает:
когда транспортное средство неподвижно или движется равномерно, ускорение транспортного средства равно нулю, и угол бокового наклона и угол продольного наклона транспортного средства получают с высокой точностью на основе принципа действия акселерометра:
θ=sin-1(ax)
где ах, ау - ускорения по оси X и оси Y системы координат ходовой части; θ - угол продольного наклона; и φ - угол бокового наклона;
когда транспортное средство быстро перемещается или сильно вибрирует, вводят гироскоп для вычисления угла пространственного положения с помощью комбинирования акселерометра и гироскопа, и для этого выполняют следующие конкретные этапы:
поскольку угол наклона (угол бокового наклона или угол продольного наклона) и угловая скорость наклона имеют производное отношение, фактический угол наклона ϕ системы используют в качестве вектора состояния, постоянное отклонение b гироскопа оценивают с помощью акселерометра, и отклонение b используют в качестве другого вектора состояния для получения уравнения состояния и уравнения наблюдений:
где ωgyro - выходное значение угловой скорости от гироскопа, причем угловая скорость включает в себя постоянное отклонение, ϕacce - значение угла, обрабатываемого акселерометром, Wg - шум измеренной величины от гироскопа, Wa - шум измеренной величины от акселерометра, b - ошибка из-за ухода параметров гироскопа, причем Wg и Wa являются независимыми друг от друга, и предполагается, что обе величины являются белыми шумами, которые удовлетворяют нормальному распределению;
при установлении ковариационной матрицы Q шума системного процесса фильтра Калмана и ковариационной матрицы R ошибки измерений формулы ковариационной матрицы Q и ковариационной матрицы R имеют следующий вид:

где q_acce и q_gyro - соответственно ковариантность акселерометра и гироскопа; r_ассе - шум измеренной величины от акселерометра;
причем вычисление и получение угла бокового наклона и угла продольного наклона транспортного средства основано на приведенных выше параметрах.
5. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны по любому из пп. 1-4, в котором этап вычисления курсового угла транспортного средства на основе положения, скорости и курсовой угловой скорости транспортного средства включает:
получение курсового угла путем вычисления направленной на восток и направленной на север скорости, при этом формула для получения курсового угла выглядит как
ψp=arctan(vE/vN),
где ψp - курсовой угол GNSS,  - соответственно направленная на восток скорость и направленная на север скорость;
- соответственно направленная на восток скорость и направленная на север скорость;
когда транспортное средство неподвижно или перемещается с очень низкой скоростью, для точного вычисления курсового угла вводят комбинацию гироскопа оси Z и GNSS, и система уравнений и уравнение наблюдений выглядят следующим образом:
где ψGNSS - выходное значение курсового угла от GNSS, br - ошибка из-за ухода параметров гироскопа, Whd - шум процесса прокладки курса, Тb - марковское время корреляции первого порядка;
после линеаризации формулы имеют следующий вид:
когда транспортное средство движется, Hyaw=[1 0], в противном случае Hyaw=[0 0].
6. Способ определения пространственного положения транспортного средства на базе GNSS-INS с использованием одиночной антенны по п. 5, в котором датчик на основе MEMS представляет собой датчик на основе MEMS по шести осям.
| CN 104698485 A, 10.06.2015 | |||
| US 9002565 B2, 07.04.2013 | |||
| WO 2013037034 A1, 21.03.2013 | |||
| US 7610146 B2, 27.10.2009 | |||
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |

