Перекрестная ссылка на родственные заявки
[1] Настоящая заявка испрашивает приоритет на основании австралийской предварительной заявки 2017901179 и австралийской завершенной заявки 2017232241, содержимое обеих из которых включено в данный документ по ссылке.
Область техники
[2] Это изобретение относится к инерциальным навигационным системам и способам.
Уровень техники
[3] Навигация является фундаментальным процессом, выполняемым в движущихся транспортных средствах, и, в широком смысле, содержит определение текущей позиции и ориентации транспортного средства со ссылкой на глобальную систему координат, так что направление или путь может быть определен по направлению к целевой позиции или по целевому маршруту. Некоторые способы навигации полагаются на информацию об ориентирах, таких как звезды, ориентиры на местности или спутники (GNSS). В некоторых прикладных задачах, однако, таких как подземные горные работы, такая информация об ориентирах не всегда является доступной. Следовательно, блок навигации транспортного средства зачастую осуществляет навигацию на основе инерциальной навигации (навигационного счисления пути). Это подразумевает определение скорости и направления движения транспортного средства и затем добавление соответствующего вектора к текущей позиции для проецирования в новую позицию.
[4] В то время как текущая скорость или ускорение могут быть определены относительно точно, как правило, трудно определять северное направление. Доступны акселерометры, которые являются достаточно точными в определении локального направления вектора ускорения благодаря силе тяжести Земли для груза отвеса (или "вектору силы тяжести" для краткости), который является сочетанием ускорений вследствие силы тяжести и центростремительного вращения Земли и эквивалентен нормали к поверхности для локально горизонтальной поверхности (или "локального уровня" для краткости). Фиг. 1 иллюстрирует Землю 100, вращающуюся вокруг северной оси 101, как указано стрелкой 102. Транспортное средство 103 находится на Земле 100, не по масштабу. Фиг. 1 показывает систему 105 координат транспортного средства, содержащую x-ось 106, y-ось 107 и z-ось 108. Предположим, что транспортное средство 103 является горизонтальной поверхностью, z-ось представляет нормаль к поверхности, которая означает, что неизвестным в ориентации транспортного средства 103 является только поворот системы 105 координат вокруг z-оси. Процесс определения поворота или, другими словами, определение направления y-оси 107 (или x-оси 106) называется определением севера. Гироскопы могут быть полезны в определении севера, если они являются достаточно точными для определения скорости вращения Земли. На основании векторной величины скорости вращения Земли (или "вектора скорости вращения" для краткости) вместе с локально измеренным вектором силы тяжести может быть полностью определена ориентация локальной системы 105 координат в отношении системы координат Земли. Это предоставляет возможность руления транспортного средства в желаемом направлении, например, благодаря северному или любому другому направлению.
[5] "Compact North Finding System" Боджи и пр. в IEEE Sensors Journal, 16/8 2016 описывает систему ориентации по Северу, содержащую 2-осный MEMS-акселерометр и 1-осный датчик скорости волоконно-оптического гироскопа (FOG). Преимуществом FOG является то, что они имеют хорошую точность, но их недостатком является то, что их волоконно-оптические компоненты трудно производить, что делает эти устройства дорогостоящими.
Сущность изобретения
[6] Это изобретение предоставляет систему ориентации по северу, использующую трехосные MEMS-гироскопы. Система предоставляет возможность выполнять процесс корректировки, который оценивает смещение скорости вращения в трех осях и использует это смещение скорости вращения, чтобы корректировать неточности, свойственные бюджетным MEMS-гироскопам.
[7] MEMS обозначает микро-электро-механические системы и, в целом, являются системами с размером между 20 микрометрами и одним миллиметром и включают в себя электронные компоненты, а также механические компоненты. В случае MEMS-гироскопов, существуют механические компоненты, такие как колеблющиеся массы, а также электронные компоненты, которые обнаруживают колебание вне плоскости колеблющихся масс. Механические компоненты и электронные компоненты, как правило, производятся как объединенная структура. Например, массы производятся, например, посредством фрезерования или травления, на одной и той же кремниевой подложке, на которой изготавливаются электронные компоненты, например, посредством литографии.
[8] Транспортное средство для подземных горных работ может включать в себя горный комбайн для выемки длинными забоями (включающий в себя ассоциированный рельс, крепления кровли, приводы, конвейер, перегружатель и дробилку), выемочный комбайн непрерывного действия, горнопроходческий комбайн; погрузчик, тягач, транспорт для перевозки персонала, спасательное транспортное средство, самоходную вагонетку; гибкий конвейерный поезд; очистительный комбайн или любое другое машинное оборудование с или без устройства извлечения, чтобы удалять горную породу из шахты.
[9] Транспортное средство для подземных горных работ содержит:
трехосный MEMS-гироскоп, установленный на вращающем устройстве, выполненном с возможностью вращать трехосный MEMS-гироскоп вокруг оси вращения во множество различных ориентаций;
интерфейс гироскопа, подключенный к трехосному MEMS-гироскопу, выполненный с возможностью принимать данные измерения вращения от трехосного MEMS-гироскопа для множества различных ориентаций, и дополнительно выполненный с возможностью
вычислять первое смещение скорости вращения трехосного MEMS-гироскопа относительно первой оси, отличной от оси вращения, на основе данных измерения вращения,
вычислять второе смещение скорости вращения трехосного MEMS-гироскопа относительно второй оси, отличной от первой оси и отличной от оси вращения, на основе данных измерения вращения,
вычислять скорость вращения вокруг оси вращения на основе вектора скорости вращения Земли посредством корректировки данных измерения вращения с помощью первого смещения скорости вращения и второго смещения скорости вращения; и
вычислять третье смещение скорости вращения трехосного MEMS-гироскопа относительно оси вращения на основе вычисленной скорости вращения вокруг оси вращения; и
блок навигации, подключенный к интерфейсу гироскопа, выполненный с возможностью
принимать первое смещение скорости вращения, второе смещение скорости вращения и третье смещение скорости вращения от интерфейса гироскопа, и
вычислять ориентацию транспортного средства для подземных горных работ на основе вектора скорости вращения Земли, первого смещения скорости вращения, второго смещения скорости вращения и третьего смещения скорости вращения.
[10] Преимуществом является то, что структура MEMS-гироскопов сводится к массе, произведенной в полупроводниковом процессе, что делает их значительно менее дорогостоящими по сравнению с волоконно-оптическими гироскопами (FOG). Это предоставляет возможность более широкого диапазона применений для MEMS. Дополнительно, с помощью гироскопа с тремя осями, ориентация может непрерывно поддерживаться во время движения. Более конкретно, трехосный MEMS-гироскоп вращается вокруг оси вращения, чтобы вычислять первое и второе смещения скорости вращения. Эти смещения значений могут быть использованы, чтобы вычислять смещение относительно оси вращения через логический вывод с помощью статически измеренного вектора скорости вращения Земли. Это ведет к значительно более точному вычислению смещения относительно оси вращения по сравнению с использованием других способов, включающих в себя итеративные способы числовой оптимизации. Это компенсирует более низкую точность MEMS-гироскопов, и, в частности, это устраняет проблему плохой повторяемости смещения значения MEMS. Дополнительно, только единственная ось вращения требуется, что уменьшает необходимость в подвесах гироскопа и других сложных механических структурах. В это же самое время, смещение значения скорости вращения вокруг единственной оси вращения определяется точно.
[11] Транспортное средство для подземных горных работ предпочтительно содержит контроллер транспортного средства, соединенный с транспортным средством и выполненный с возможностью
останавливать транспортное средство;
корректировать инерциальную навигационную систему, в то время как транспортное средство остановлено;
инструктировать вращающему устройству вращать трехосный гироскоп, в то время как транспортное средство остановлено;
инструктировать интерфейсу гироскопа вычислять первое, второе и третье смещения значения скорости вращения; и
возобновлять движение транспортного средства на основе вычисленной ориентации.
[12] Транспортное средство для подземных горных работ дополнительно предпочтительно содержит трехосный акселерометр, соединенный с возможностью связи с блоком навигации, при этом блок навигации выполнен с возможностью вычислять ориентацию на основе данных ускорения от трехосного акселерометра.
[13] Блок навигации предпочтительно является инерциальным блоком навигации и выполнен с возможностью определять абсолютное местоположение транспортного средства для подземных горных работ на основе ориентации.
[14] Интерфейс гироскопа предпочтительно дополнительно выполнен с возможностью вычислять третье смещение скорости вращения посредством вычисления скорости вращения вокруг оси вращения и вычисления третьего смещения скорости вращения на основе вычисленной скорости вращения вокруг оси вращения и вектора скорости вращения Земли.
[15] Предпочтительно, интерфейс гироскопа дополнительно выполнен с возможностью вычислять скорость вращения посредством корректировки данных измерения вращения с помощью первого смещения скорости вращения и второго смещения скорости вращения.
[16] Предпочтительно, интерфейс гироскопа выполнен с возможностью вычислять скорость  вращения вокруг третьей оси вращения согласно
вращения вокруг третьей оси вращения согласно  , где
, где  является величиной вектора скорости вращения Земли,
является величиной вектора скорости вращения Земли,  является скоростью вращения вокруг первой оси вращения, и
является скоростью вращения вокруг первой оси вращения, и  является скоростью вращения вокруг второй оси вращения, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
является скоростью вращения вокруг второй оси вращения, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
[17] Предпочтительно, транспортное средство для подземных горных работ дополнительно содержит фильтр, соединенный с интерфейсом гироскопа и выполненный с возможностью непрерывно отслеживать третье смещение скорости вращения.
[18] Предпочтительно, транспортное средство для подземных горных работ дополнительно содержит дополнительный трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ, при этом блок навигации соединяется с дополнительным трехосным MEMS-гироскопом и выполнен с возможностью принимать дополнительные данные измерения вращения от дополнительного трехосного MEMS-гироскопа и вычислять ориентацию транспортного средства для подземных горных работ на основе дополнительных данных измерения вращения.
[19] Преимуществом является наличие второго неподвижного трехосного гироскопа, работающего в "непрерывном режиме интегрирования" и корректируемого посредством вращения, заданного, в частности, когда транспортное средство является неподвижным.
[20] Предпочтительно, интерфейс гироскопа выполнен с возможностью вычислять скорость вращения вокруг третьей оси вращения согласно , где является величиной вектора скорости вращения Земли, является скоростью вращения вокруг первой оси вращения, и является скоростью вращения вокруг второй оси вращения, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно;
транспортное средство для подземных горных работ дополнительно содержит трехнаправленный акселерометр, соединенный с возможностью обмена данными с блоком навигации, и блок навигации выполнен с возможностью вычислять ориентацию на основе данных об ускорении от трехнаправленного акселерометра; и
транспортное средство для подземных горных работ дополнительно содержит дополнительный трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ, и блок навигации соединяется с дополнительным трехосным MEMS-гироскопом и выполнен с возможностью принимать дополнительные данные измерения вращения от дополнительного трехосного MEMS-гироскопа и вычислять ориентацию транспортного средства для подземных горных работ на основе дополнительных данных измерения вращения.
[21] Способ для вычисления ориентации транспортного средства для подземных горных работ содержит:
вращение трехосного MEMS-гироскопа вокруг оси вращения во множество различных ориентаций;
прием данных измерения вращения от трехосного MEMS-гироскопа для множества различных ориентаций;
вычисление первого смещения скорости вращения трехосного MEMS-гироскопа относительно первой оси, отличной от оси вращения, на основе данных измерения вращения;
вычисление второго смещения скорости вращения трехосного MEMS-гироскопа относительно второй оси, отличной от первой оси и отличной от оси вращения, на основе данных измерения вращения, и
вычисление скорости вращения вокруг оси вращения на основе вектора скорости вращения Земли посредством корректировки данных измерения вращения с помощью первого смещения скорости вращения и второго смещения скорости вращения; и
вычисление третьего смещения скорости вращения трехосного MEMS-гироскопа относительно оси вращения на основе вычисленной скорости вращения вокруг оси вращения; и
вычисление ориентации транспортного средства для подземных горных работ на основе вектора скорости вращения Земли, первого смещения скорости вращения, второго смещения скорости вращения и третьего смещения скорости вращения.
[22] Предпочтительно, способ дополнительно содержит:
остановку транспортного средства;
корректировку инерциальной навигационной системы, в то время как транспортное средство остановлено;
вращение трехосного гироскопа, в то время как транспортное средство остановлено;
вычисление первого, второго и третьего смещения скорости вращения; и
возобновление движения транспортного средства на основе вычисленной ориентации.
[23] Предпочтительно, остановка транспортного средства содержит остановку транспортного средства более чем на 10 секунд и менее чем на 300 секунд перед возобновлением движения транспортного средства.
[24] Предпочтительно, возобновление движения транспортного средства содержит возобновление движения на более чем или равное нулю метров и менее 100 метров.
[25] Предпочтительно, способ дополнительно содержит вычисление компонентов ориентации, несвязанных с направлением, на основе данных ускорения от трехосного акселерометра.
[26] Предпочтительно, способ дополнительно содержит определение абсолютного местоположения транспортного средства для подземных горных работ на основе ориентации.
[27] Предпочтительно, способ дополнительно содержит вычисление третьего смещения скорости вращения посредством вычисления скорости вращения вокруг оси вращения и вычисления третьего смещения на основе вычисленной скорости вращения вокруг оси вращения и вектора скорости вращения Земли.
[28] Предпочтительно, вычисление скорости вращения содержит корректировку данных измерения вращения с помощью первого смещения скорости вращения и второго смещения скорости вращения.
[29] Предпочтительно, вычисление скорости вращения вокруг третьей оси вращения содержит вычисление , где является величиной вектора скорости вращения Земли, является скоростью вращения вокруг первой оси вращения, и является скоростью вращения вокруг второй оси вращения, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
[30] Предпочтительно, способ дополнительно содержит непрерывное отслеживание первого, второго и третьего смещений скорости вращения.
[31] Предусматривается использование трехосного MEMS-гироскопа для навигации транспортного средства посредством вращения трехосного MEMS-гироскопа, вычисления смещения скорости вращения по трем осям на основе вектора скорости вращения Земли и вычисления ориентации транспортного средства на основе вектора скорости вращения Земли и смещения скорости вращения по трем осям.
[32] Опциональные признаки, описанные для какого-либо аспекта транспортного средства или способа, когда целесообразно, аналогично применяются к другим аспектам, также описанным здесь.
Краткое описание чертежей
[33] Фиг. 1 иллюстрирует локальную систему координат транспортного средства на Земле согласно предшествующему уровню техники.
[34] Пример будет описан со ссылкой на следующие чертежи:
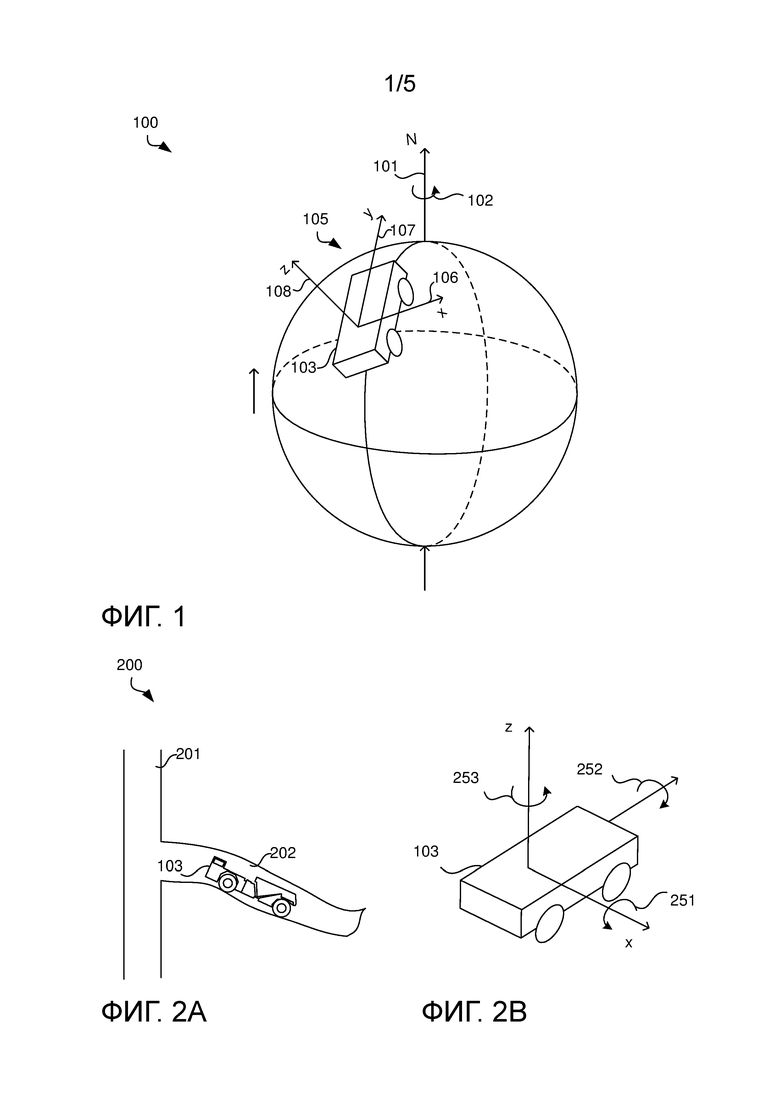
Фиг. 2a схематично иллюстрирует подземную шахту.
Фиг. 2b иллюстрирует абсолютные измерения угла поворота вокруг вертикальной, поперечной и продольной осей.
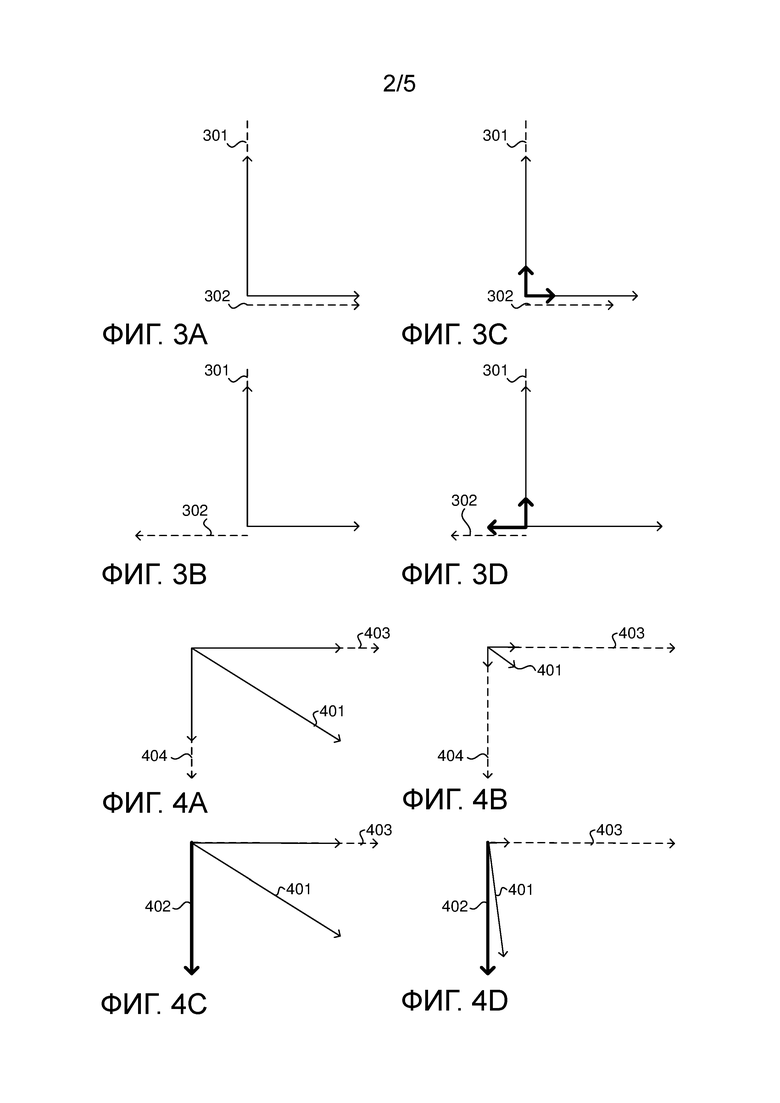
Фиг. 3a, 3b, 3c и 3d иллюстрируют принцип майтага.
Фиг. 4a, 4b, 4c и 4d иллюстрируют сингулярность оси вращения Земли майтага.
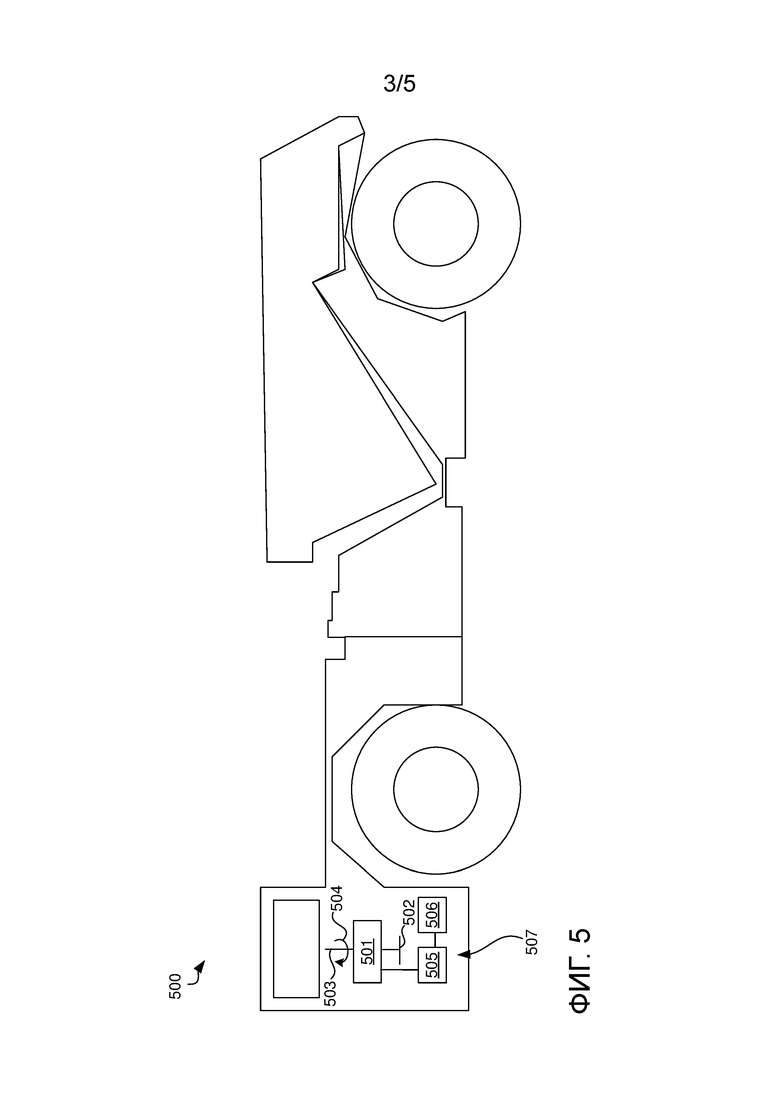
Фиг. 5 иллюстрирует транспортное средство для подземных горных работ.
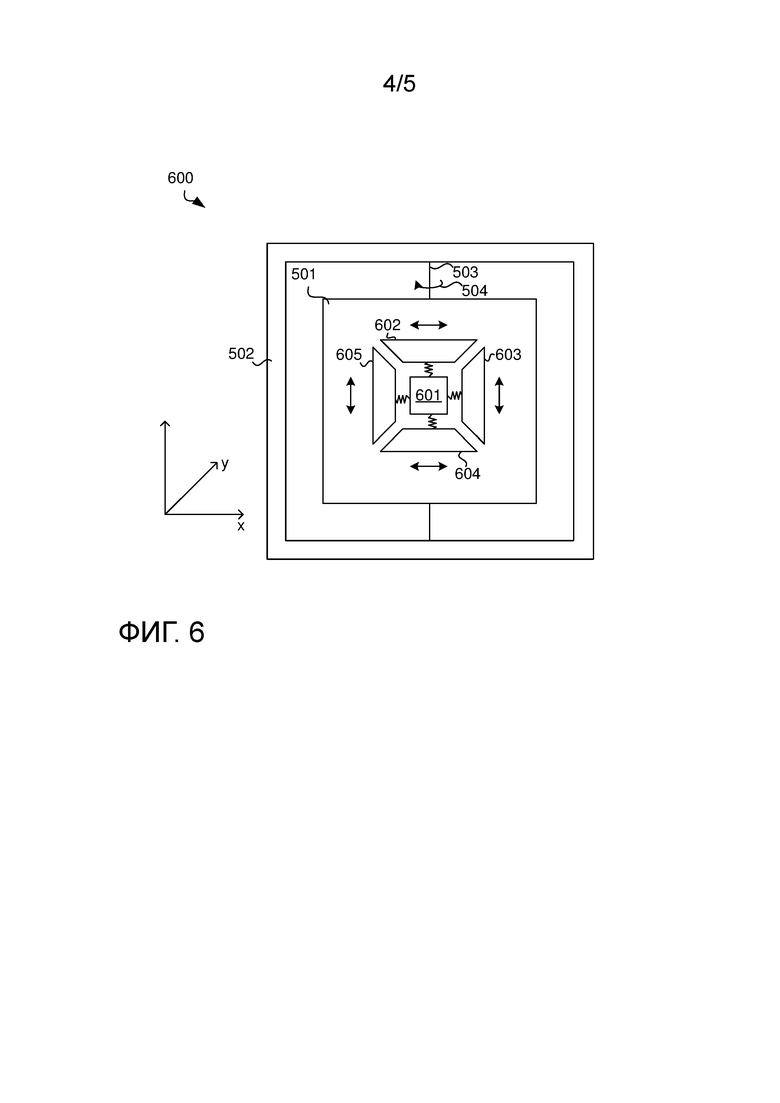
Фиг. 6 иллюстрирует трехосный MEMS-гироскоп.
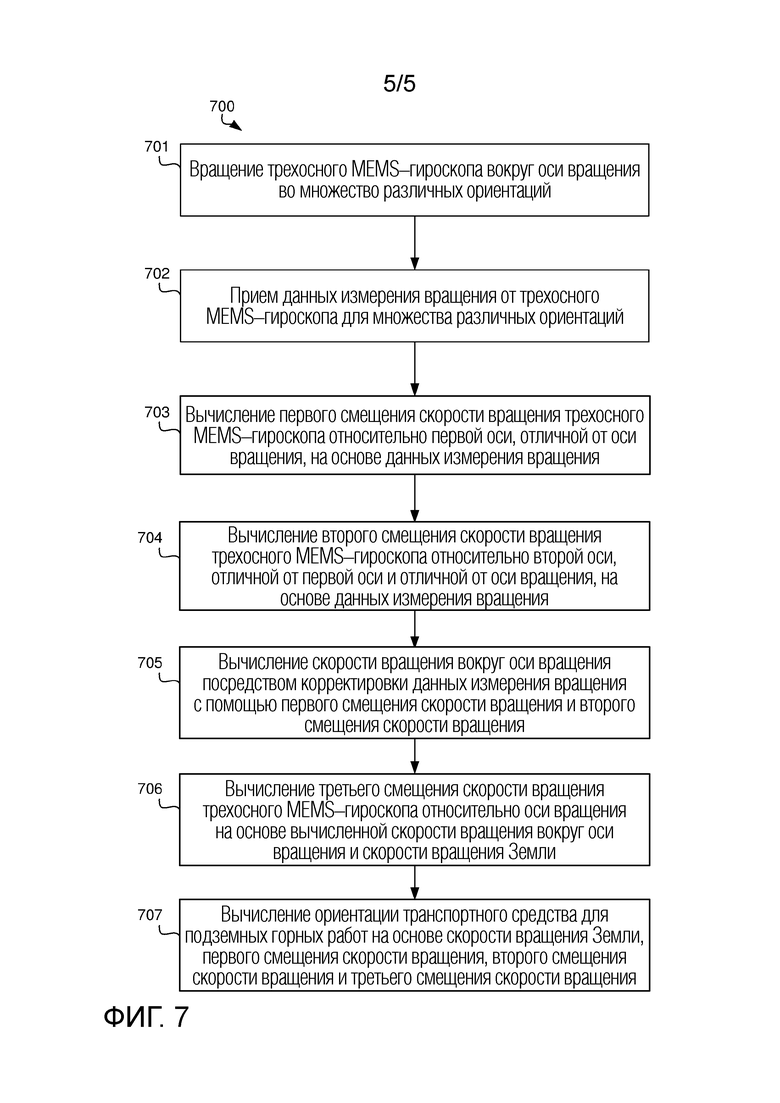
Фиг. 7 иллюстрирует способ для вычисления ориентации транспортного средства для подземных горных работ.
Описание вариантов осуществления
[35] Ориентация по северу, или, более технически, гироскопическое ориентирование, является способностью достаточно чувствительного и точного гироскопа (или 'гиро' для краткости) иметь возможность обнаруживать скорость вращения Земли, представленной в любой системе 105 координат наблюдения, которая является фиксированной относительно вращающейся Земли 100. Кроме того, эта величина часто представляется как векторная величина, которая объединяет величину скорости вращения в качестве векторной величины, ось вращения 101 в качестве направления вектора и направление вращения 102 с помощью правила правой руки, чтобы определять вращение вокруг вектора. Ось 101 скорости вращения Земли и направление являются явно неподвижными относительно поверхности Земли, так что вектор, наблюдаемый на Северном полюсе, указывает непосредственно вверх от локального уровня, непосредственно вниз на Южном полюсе и является параллельным локальному уровню на экваторе, как иллюстрировано на фиг. 1. Для локального наблюдения этого вектора направление может, таким образом, быть использовано, чтобы "ориентироваться по северу", следовательно, выполняя действие гироскопического ориентирования.
[36] Величина этого вектора представляет скорость вращения Земли и равна 7,292 × 10-5 радиан в секунду, или приблизительно 15,04 градусов в час. Причиной того, что это не является точно 15 градусами в час, как может быть выражено для 24-часового дня, является размещение орбиты Земли вокруг Солнца; 15,00 градусов в час измеряет солнечное время, тогда как скорость 15,04 градуса в час является сидерической скоростью, наблюдаемой посредством инерциальных измерительных систем.
[37] Чувствительность гироскопа, который должен быть использован для гироскопического ориентирования, однако, должна быть значительно лучше по сравнению с этой скоростью для того, чтобы иметь возможность анализировать компоненты вектора скорости вращения Земли. На экваторе вся эта наблюдаемая скорость присутствует в горизонтальных компонентах локального уровня и, таким образом, представляет максимальную достижимую чувствительность. Это ухудшается с более высокой широтой (как косеканс широты) до тех пор, пока очень малый компонент вектора не будет находиться в горизонтальной плоскости при приближении к полюсам. Если ориентирование системы 105 координат транспортного средства не является горизонтальным и способно приближаться к тому, или иному экстремуму, (параллельно или перпендикулярно вектору скорости вращения Земли), чувствительность ориентирования по северу гироскопа может быть очень переменчивой.
[38] Фиг. 2a схематично иллюстрирует подземную шахту 200. Подземная шахта 200 содержит ствол 201 и наклонный въезд 202 и транспортное средство 103 для горных работ с фиг. 1. Как может быть видно на чертеже, когда транспортное средство 103 для подземных горных работ движется по наклонному въезду 202, ориентация транспортного средства для горных работ изменяется. В некоторых примерах наклонный въезд 202 имеет спиральную форму, которая означает, что ориентация транспортного средства 103 для подземных горных работ изменяется значительно.
[39] Фиг. 2b иллюстрирует примерную ориентацию транспортного средства 103 для подземных горных работ. В этом примере ориентация описывается стандартными эйлеровыми углами, обычным образом сообщаемыми посредством инерциальных измерительных систем (INS), чтобы описывать ориентацию INS. Эйлеровы углы наклона относительно поперечной оси 251, продольной оси 252 и вертикальной оси 253 определяются относительно осей 'x', 'y', 'z' системы координат, в таком порядке, соответственно. Порядок представляет измененное условное обозначение и уникально определяет ориентацию ИНС относительно локального уровня и географического севера. В других примерах, однако, другой выбор меток и условных обозначений в равной степени может быть использован.
[40] Чувствительность ориентации по северу
[41] Возвращаясь к вопросу чувствительности, точность направления севера для заданной широты с помощью гироскопического ориентирования является функцией чувствительности компонентов гироскопа в плоскости восприятия.
[42] Аппроксимация обеспечивает ожидаемую точность угла азимута как функции шума по компонентам гироскопа:

где  является неточностью скорости гироскопа, в единицах градусов в час, а
является неточностью скорости гироскопа, в единицах градусов в час, а  является точностью углового указания, которая может ожидаться. Отметим, что, когда неточность скорости гироскопа равна скорости вращения Земли, точность равна порядка ±45 градусов, означая, что измерение является неспособным определять направление с точностью до квадранта компаса. Чтобы добиваться точности порядка 1 градуса, неточность скорости гироскопа должна быть лучше приблизительно 0,2 градуса/час по этой оценке.
является точностью углового указания, которая может ожидаться. Отметим, что, когда неточность скорости гироскопа равна скорости вращения Земли, точность равна порядка ±45 градусов, означая, что измерение является неспособным определять направление с точностью до квадранта компаса. Чтобы добиваться точности порядка 1 градуса, неточность скорости гироскопа должна быть лучше приблизительно 0,2 градуса/час по этой оценке.
[43] Спецификации инерциального измерительного MEMS-блока
[44] Относительно прикладных задач определения севера, наиболее релевантные аспекты спецификации инерциального измерительного блока (IMU) являются спецификациями гироскопа. Сила локально измеряемого вектора силы тяжести, в целом, является большой, 9,8 метра в секунду в квадрате, также называемая 1g, так что даже неточность акселерометра порядка 10 милли-g (98 мм/с2) представляет точность (для определения уровня) порядка 0,5 градусов. Напротив, MEMS-гироскоп с неточностью порядка ±20 градусов в час может предоставлять не лучше ±50 градусов точности указания, что является недостаточным для прикладных задач определения севера.
[45] В этот момент характеристики некоторое уточнение различных неточностей в обоих акселерометрах и гироскопах обеспечивается. Двумя ключевыми характеристиками являются непостоянство смещения значения и повторяемость смещения значения. Смещения значений на акселерометрах и гироскопах являются доминирующими неточностями, которые служат для добавления либо положительного, либо отрицательного сигнала к измеренному сигналу, способами, которые могут быть непредсказуемыми. Смещение значения может быть компенсировано некоторым образом для того, чтобы получать обратно сигналы, которые предоставляют возможность определения направления с требуемой точностью. Непостоянство смещения значения ссылается на окончательное постоянство смещения значения, когда все другие влияния, такие как дрейф и белый шум, удалены. Это представляет то, каким стабильным является смещение значения, и как быстро может ожидаться его изменение. Гироскоп с непостоянством смещения значения в 0,05 градусов в час, может подразумевать изменение не быстрее этой скорости в иначе управляемом окружении, таком как окружение, которое имеет устойчивую температуру. Повторяемость смещения, однако, описывает, насколько повторяемым смещение является при множестве факторов управления, таких как повторяемость включения, нагрев, температура и старение. Непостоянство смещения может ограничивать изменение смещения в отсутствие этих факторов, но иначе это обычно наводняется факторами повторяемости и, следовательно, представляет функциональное ограничение. Для MEMS-гироскопа с повторяемостью смещения не лучше 20 градусов в час, небольшое непостоянство смещения может не гарантировать точность указания, если повторяемость не компенсируется посредством измерения или управления. Для справки, низкокачественные FOG с очень небольшими волоконно-оптическими контурными областями демонстрируют повторяемость смещения порядка 2 градусов в час.
[46] Как отмечено, для того, чтобы добиваться характеристики указания FOG-качества, более плохая характеристика повторяемости смещения должна быть компенсирована некоторым образом. Два варианта обычно рассматриваются; (1) управление температурой, и (2) майтаггинг, также известный как индексирование.
[47] Управление температурой
[48] Вследствие природы MEMS, эти системы являются очень чувствительными к изменениям в температуре, как блока в целом, так и в пределах блока исходя из температурных градиентов. Управление температурой, следовательно, выполняется во множестве MEMS IMU как часть обычной работы. Остатком после этого управления является то, что типично сообщается в спецификациях производителя, таким образом, любую дополнительную внешнюю компенсацию будет необходимо резко улучшать на основании базовых спецификаций.
[49] Если система непрерывно поддерживается при постоянной температуре, любые изменения с первоначального включения MEMS будут, в конечном счете, уравновешивать и оставаться постоянными в пределах фундаментальной стабильности, в случае смещения, непостоянство смещения. Если только смещение не измеряется независимо в этом состоянии постоянной температуры, даже это значение может, следовательно, дрейфовать со скоростью непостоянства смещения, так что с достаточным временем, оно может вырасти до пределов, указанных посредством повторяемости.
[50] Кроме того, это представляет только одну проблему, которую необходимо устранить в управлении температурой для смещения. На практике, может быть очень проблематичным поддерживать постоянство температуры и температурный градиент в MEMS в реальном окружении. Механизмы как для нагрева, так и охлаждения MEMS могут быть использованы, или альтернативно управляться при одном экстремуме, до которого увеличение/потеря тепла для окружения может быть гарантировано, предоставляя возможность использования только охлаждения/нагрева, соответственно. Это добавляет объема инструменту и дополнительные факторы, чтобы гарантировать, что управление температурой может корректно работать.
[51] Типично блок будет также иметь энергетический цикл, так что переходные состояния нагрева будут присутствовать. Повторяемость смещения значения при включении будет дополнительно приводить в результате к неизвестному смещению значения, даже если приводится к одинаковой температуре каждый раз. Совокупно, эти проблемы делают компенсацию смещения значения посредством этого подхода трудной. По этой причине второй вариант майтагирования может быть предпочтительным.
[52] Майтагирование (Maytagging)
[53] Этот процесс ссылается на физическое вращение системы на точно известную величину вокруг выбранной оси, ось майтага (maytag) в присутствии известного сигнала скорости вращения, типично скорости вращения Земли. Он также называется 'индексированием', в котором различные ориентации поворота представляют различные и точно известные индексированные позиции. Типично существуют две позиции, которые представляют поворот точно на 180 градусов. Этот процесс имеет результат в том, что любые сигналы, присутствующие в осях, перпендикулярных оси майтага, будут иметь противоположный знак. Транспортное средство 103 для горных работ может оставаться неподвижным в течение процедуры майтагирования.
[54] В одном примере, первая ось, вторая ось и третья (вращения) ось при этом являются перпендикулярными друг другу и неподвижными относительно транспортного средства 103 или в известной ориентации относительно транспортного средства 103, например, первая ось является параллельной переднему направлению транспортного средства 103, вторая ось является параллельной боковому направлению транспортного средства 103, а ось вращения является параллельной вертикальной оси транспортного средства. Однако, другие ориентации могут быть подходящими, и три оси могут не быть точно перпендикулярными, но линейно независимыми. Аналогично, вращение может быть вокруг оси вращения в приращениях 180 градусов или приращениях 90 градусов, например, в направлении первой и второй осей, или любой другой размер шага, пока он приводит в результате к линейно независимым измерениям.
[55] Фиг. 3a, 3b, 3c и 3d иллюстрируют принцип майтага. В позициях 3a-3d ось майтага является вертикальной штриховой линией 301, ось измерения является горизонтальной штриховой линией 302, измеренные сигналы являются черными стрелками, и смещения значений являются толстыми стрелками. На фиг. 3a и 3b смещение значения не присутствует, таким образом, когда ось 302 измерения поворачивается на 180 градусов вокруг оси 301 майтага, горизонтальный сигнал вдоль этой оси будет виден как изменяющий знак, но сохраняющий ту же величину. Отметим, что вертикальный сигнал остается тем же самым, поскольку не существует изменения относительно этого направления. Одинаковые сигналы, измеренные на фиг. 3c и 3d, имеют присутствующее смещение, которое перемещается с осями. Ось измерения изменяет направление, и смещение перемещается с этой осью. Отметим опять, что сигнал и смещение относительно оси майтага не изменяются. Таким образом, в одной позиции, больший сигнал виден на оси измерения, а в другой позиции - меньший. Смещение может, таким образом, быть однозначно логически выведено из различия между обоими сигналами в каждой позиции. Смещение на оси майтага, однако, остается неизвестным, поскольку она не изменяется. Отметим также, что, в то время как определение севера часто является целью измерения скорости вращения Земли, сама скорость вращения Земли используется в качестве опорного сигнала, чтобы демаскировать смещения, присутствующие в системе, с помощью принципа майтага в качестве промежуточного этапа для процесса определения севера.
[56] В 3D-системе единственная ось майтага может, таким образом, быть использована, чтобы логически выводить смещения на двух других перпендикулярных осях. Например, майтагирование относительно x-оси может быть использовано, чтобы принимать решение о смещениях на y-оси и z-оси, при этом смещение на x-оси остается неизвестным. В прикладных задачах, требующих полных навигационных решений, это может быть недостаточным, поскольку является желательным, чтобы сигнал был точно известным относительно всех трех осей для того, чтобы производить решение. В контексте прикладных задач определения севера может быть достаточным использовать только две из трех осей для того, чтобы определять направление севера. Существуют, однако, патологические случаи, использующие этот подход.
[57] Патологический случай майтага - сингулярность выравнивания оси Земли
[58] Фиг. 4a, 4b, 4c и 4d иллюстрируют сингулярность оси вращения Земли майтага. Рассмотрим ситуации, в которых инструментальная ось майтага либо совпадает, либо не совпадает с вектором скорости вращения Земли для заданного местоположения. На фиг. 4a-4d измеренный вектор скорости вращения Земли показан тонкой сплошной линией 401, ось майтага является 'z'-осью в толстой линии 402, и 'x' и 'y'-оси являются штриховыми линиями 403 и 404, соответственно. Чтобы иллюстрировать 3D-зависимость, схемы 4a-4d показаны с помощью видов 'снизу' (4a и 4b) и 'сбоку' (4c и 4d), где низ рассматривается в положительном направлении 'z'-оси, смотрящем из-под плоскости x-y, а бок рассматривается по отрицательной 'x'-оси, смотрящей на плоскость z-y. Если сигнал присутствует на всех осях, как показано в двух видах, предоставленных посредством 4a и 4c, то компоненты вектора скорости вращения Земли в плоскости x-y предоставляют возможность легкого измерения угла относительно севера, как ранее описано на фиг. 2. Это произойдет, когда ось майтага не совпадает с вектором скорости вращения Земли. Однако, когда ось майтага выравнивается близко к этому вектору, ситуация является аналогичной видам, предоставленным посредством 4b и 4d, на которых практически сигнал не присутствует в плоскости x-y. Следовательно, выравнивание по северу трудно определять, поскольку оно становится очень искаженным вследствие того, что сигналы в этой плоскости являются небольшими и сравнимыми с уровнями шума гироскопа. Это не будет проблемой, если сигнал z-оси сможет быть использован, поскольку углы, созданные в других плоскостях z-x и z-y, могут быть привязаны к северу. Однако, майтагирование вокруг z-оси обеспечивает только знание сигналов в плоскости x-y, и неизвестное смещение на z-оси может полностью делать неясным истинный сигнал и, следовательно, северное направление.
[59] Эта ситуация представляет патологический случай для майтагирования с единственной осью вращения. Когда система выравнивает ось майтага с вектором скорости вращения Земли, точность ухудшается до момента неспособности определять направление. Это может происходить на любой широте. Например, если работа происходит на экваторе, вектор скорости вращения Земли является горизонтальным и указывающим на север. Любая система с направлением оси майтага, выровненной близко к этому направлению, не может четко разрешать север. Аналогично на некоторой промежуточной широте, вектор скорости вращения Земли будет указывать север, но будет наклонен к локальному уровню на текущую широту. Любая система с осью майтага, выровненной в этом направлении, будет препятствовать точному получению курса.
[60] Один заключительный комментарий может быть сделан относительно этой проблемы. Когда выравнивание с осью вращения Земли приближается, качество определения курса ухудшается. Это, в действительности, предоставляет информацию о том, что выравнивание транспортного средства должно, следовательно, быть близким к северу. Тогда как на самом деле, остается проблема точности того, насколько точно близким выравнивание является к северу. Это не является прямо разрешимым.
[61] Точно вертикальный патологический случай
[62] Другая ситуация возникает, когда транспортное средство является точно горизонтальным. Однако, не нужно делать что-либо с недостатками майтагирования с единственной осью вращения; это является проблемой, которая присутствует во всех ИНС и просто относится к сингулярностям, присущим в определении ориентации относительно локальной вертикали. Уровень инструмента измеряется с помощью IMU-акселерометров, которые однозначно определяют направление локально измеренного вектора силы тяжести, в отсутствие других сил движения или источников погрешности в инструменте. Когда система является очень близкой к вертикали, возникает та же проблема, иллюстрированная на фиг. 4, в этом случае, с локально измеренным сигналом вектора тяжести, выравнивающимся к вертикальной оси акселерометра. Здесь, однако, направление севера, определенное посредством инструмента, не становится неопределенным, а вместо этого очень чувствительным к наклону. Сообщенный курс может колебаться вокруг вертикали в зависимости от направления наклона, который может изменять направление значительно вследствие небольших компонентов вектора силы тяжести в горизонтальной плоскости. Во многом, это может быть просто обойдено посредством собственного выбора определения курса.
[63] Транспортное средство для подземных горных работ
[64] Фиг. 5 иллюстрирует транспортное средство 500 для подземных горных работ, которое содержит трехосный MEMS-гироскоп 501, установленный на вращающем устройстве 502. Вращающее устройство 502 выполнено с возможностью вращать трехосный MEMS-гироскоп 501 вокруг оси 503 вращения во множество различных повернутых ориентаций, указанных стрелкой 504. Транспортное средство 500 для горных работ дополнительно содержит интерфейс 505 гироскопа, соединенный с трехосным MEMS-гироскопом 501. Интерфейс 505 гироскопа выполнен с возможностью принимать данные измерения вращения от трехосного MEMS-гироскопа 501 для множества различных повернутых ориентаций. Данные измерения вращения могут содержать скорость вращения, измеряемую посредством гироскопа, включающего в себя соответствующее смещение. Например, данные измерения вращения могут содержать измеряемую в настоящий момент скорость вращения вокруг трех осей трехосного гироскопа 501 и могут быть тройкой данных (w1, w2, w3) в каждый момент выборки. Отметим, что данные измерения вращения могут также быть предварительно обработаны посредством гироскопа 510, например, выровнены. В этом смысле, прием данных измерения вращения для различной повернутой ориентации означает, что первая тройка данных принимается для первой ориентации (такой как 0 градусов), вторая тройка данных принимается во второй ориентации (такой как 90 градусов) и т.д. Интерфейс 505 гироскопа дополнительно выполнен с возможностью вычислять первое смещение скорости вращения трехосного MEMS-гироскопа 501 относительно первой оси, отличной от оси 503 вращения, на основе данных измерения вращения. Интерфейс 505 гироскопа также выполнен с возможностью вычислять второе смещение скорости вращения трехосного MEMS-гироскопа 501 относительно второй оси, отличной от первой оси и отличной от оси 503 вращения, на основе данных измерения вращения и вычислять третье смещение скорости вращения трехосного MEMS-гироскопа 501 относительно оси вращения на основе первого смещения скорости вращения, второго смещения скорости вращения и вектора скорости вращения Земли.
[65] Одним примером для MEMS-гироскопа является Apogee-A от SBG Systems, который сообщает неустойчивость на время смещения < 0,08 градусов в час.
[66] Транспортное средство 500 для горных работ дополнительно содержит блок 506 навигации, соединенный с интерфейсом 505 гироскопа. Блок 506 навигации выполнен с возможностью принимать первое смещение скорости вращения, второе смещение скорости вращения и третье смещение скорости вращения, которые вычисляются посредством интерфейса 505 гироскопа. Блок 506 навигации дополнительно выполнен с возможностью вычислять ориентацию транспортного средства 500 для подземных горных работ на основе вектора скорости вращения Земли, первого смещения скорости вращения, второго смещения скорости вращения и третьего смещения скорости вращения.
[67] Когда используется термин 'сконфигурированный' (выполненный с возможностью), он может ссылаться на широкий диапазон различных способов конфигурирования системы. Например, вращающее устройство 502 может быть микропроцессором, FPGA, ASIC или другим конфигурируемым устройством, которое программируется, чтобы вращать гироскоп, или может быть шасси и мотором, который автоматически вращает гироскоп без дополнительных входных данных. Аналогично, интерфейс гироскопа и блок 506 навигации могут быть процессорами, запрограммированными, чтобы выполнять описанные функции, или могут быть ASIC, FPGA или другим конфигурируемым устройством, выполненным с возможностью выполнять такие функции. Дополнительно отмечается, что вращающее устройство 502, интерфейс 505 гироскопа и блок 506 навигации могут быть реализованы между одним или множеством аппаратных устройств. В частности, вращающее устройство 502, интерфейс 505 гироскопа и блок 506 навигации могут быть реализованы на одном и том же микропроцессоре с помощью отдельного или перекрывающегося программного кода, процессов или потоков, чтобы представлять эти блоки.
[68] MEMS-гироскоп 501, вращающее устройство 502, интерфейс 505 гироскопа и блок 506 навигации вместе формируют навигационную систему 507, которая может быть объединена в единое устройство и использована на транспортных средствах для горных работ, также как на транспортных средствах для гражданского строительства и в других прикладных задачах с или без доступа к GPS-сигналам.
[69] MEMS-гироскоп
[70] Дополнительно к введению для MEMS-гироскопа выше, фиг. 6 иллюстрирует трехосный MEMS-гироскоп 501 более подробно. Гироскоп 501 содержит центральную часть, которая удерживает обрабатывающую электронику, и четыре проверенных груза 602, 603, 604 и 605. Проверенные грузы 602, 603, 604 и 605 колеблются в плоскости чертежа, как указано стрелками. Когда транспортное средство 500 поворачивает, и гироскоп вращается, проверенные грузы 602, 603, 604 и 605 имеют тенденцию сохранять свою плоскость колебания, в то время как сам гироскоп 501 вращается. В результате, проверенные грузы 602, 603, 604 и 605 колеблются вне плоскости, что может быть обнаружено посредством конденсаторов (не показаны). Это емкостное измерение указывает скорость вращения, которая может быть измерена в единицах градусов в секунду, радиан в секунду или Герцах.
[71] В некоторых примерах, MEMS-датчики, упоминаемые в данном документе, могут быть одноосными системами, каждая исключительно устанавливается на платах электронных схем с поддерживающей электроникой. Три отдельные схемные платы устанавливаются на общее шасси, так что ось измерения любой платы является ортогональной двум другим. Это формирует 3-осный кластер из одноосных датчиков. Одноосные MEMS-датчики типично имеют более высокую производительность по сравнению с трехосными MEMS-датчиками и могут приближаться к аналогичной характеристике непостоянства смещения для FOG.
[72] Типично, почти каждый гироскоп имеет смещение, которое является аддитивной погрешностью в сообщаемой скорости вращения. Это смещение может быть различным для различных осей и может изменяться со временем, например, когда гироскоп изменяет температуру или с течением времени.
[73] Одним из главных факторов, который ограничивает характеристику в MEMS-гироскопах, является непостоянство смещения гироскопа, которое ссылается на конечное постоянство смещения, когда все другие воздействия, такие как дрейф и белый шум, устранены. Это представляет то, каким стабильным является смещение, и как быстро может ожидаться его изменение. Гироскоп с непостоянством смещения 0,05 градусов в час может, как предполагается, изменяться не быстрее этой скорости в иначе контролируемом окружении. Для сравнения, непостоянство смещения для FOG среднего-высокого качества может составлять 0,01 градуса в час, тогда как для MEMS-датчика среднего качества может составлять 0,2 градуса в час или выше.
[74] Другим ограничивающим фактором является повторяемость смещения, которая описывает, насколько повторяемым смещение является под действием множества факторов управления, таких как повторяемость включения, нагрев, температура и старение. Непостоянство смещения может ограничивать изменение смещения в отсутствие этих факторов, но иначе это обычно подавляется факторами повторяемости и, следовательно, представляет функциональное ограничение. Для MEMS с повторяемостью смещения не лучше 20 градусов в час очень маленькое непостоянство смещения будет немного делать для обеспечения точности указания, если повторяемость как-то не компенсируется посредством измерения или управления. Например, FOG низкого качества с очень небольшими волоконно-оптическими контурными областями демонстрируют повторяемость смещения порядка 2 градусов в час, а FOG среднего-высокого качества демонстрируют 0,01 градусов в час.
[75] Определение смещения третьей оси
[76] Для того, чтобы устранять проблемы смещения, гироскоп 501 может вращаться посредством вращающего устройства 502 вокруг оси 503 вращения. Как отмечено выше, множество повернутых ориентаций вокруг оси 503 вращения предоставляют возможность определения смещения относительно первой оси и второй оси, которые обе являются перпендикулярными друг другу и оси 503 вращения, которая является параллельной z-оси на фиг. 3. Примеры, предоставленные в данном документе, ссылаются на x-ось в качестве "первой оси", y-ось в качестве "второй оси" и z-ось в качестве "третьей оси". Отметим, однако, что три оси могут быть переставлены.
[77] Постоянная скорость вращения, такая как вращение Земли, когда транспортное средство 500 для горных работ остановлено, может быть обнаружена при ориентации поворота, равной нулю градусов (или положение указателя) и затем снова при ориентации поворота 180 градусов (или положение указателя) вокруг оси 503 вращения. Различие, измеренное между двумя скоростями вращения на первой оси для двух повернутых ориентаций, является смещением первой оси. Аналогично, различие, измеренное между двумя скоростями вращения на второй оси для двух повернутых ориентаций, является смещением второй оси. Более конкретно, измерения первой оси, когда определены перпендикулярно направлению севера 205, задаются:
где ωh является скоростью вращения Земли на заданной широте, α является углом азимута (направлением) первой оси относительно севера, b является смещением гироскопа (нулевое смещение). Суммируем результаты обоих выражений в смещении как ω(0) + ω(180) = 2b. В то время как эта процедура может предоставлять смещение в двух осях, трудно определять смещение в третьей оси.
[78] Отметим, что, в целом, скорость вращения Земли,  , может быть записана в единицах величины компонентов вектора как
, может быть записана в единицах величины компонентов вектора как  , где
, где  являются компонентами вектора для вектора скорости вращения Земли, измеренного по осям x, y и z гироскопа, соответственно. Следовательно, скорость вращения вокруг оси вращения (z-оси в этом примере) может быть записана как:
являются компонентами вектора для вектора скорости вращения Земли, измеренного по осям x, y и z гироскопа, соответственно. Следовательно, скорость вращения вокруг оси вращения (z-оси в этом примере) может быть записана как:  . Это может в равной степени быть применено к смещению, которое означает, что смещение скорости вращения вокруг оси вращения может быть вычислено на основе смещений вокруг осей x и y, соответственно, и скорости вращения Земли с помощью вышеупомянутого уравнения для
. Это может в равной степени быть применено к смещению, которое означает, что смещение скорости вращения вокруг оси вращения может быть вычислено на основе смещений вокруг осей x и y, соответственно, и скорости вращения Земли с помощью вышеупомянутого уравнения для  . В одном примере,
. В одном примере,  и
и  в вышеупомянутом уравнении представляет скорректированные данные измерения вращения после удаления вычисленного смещения. Вычисленная скорость вращения вокруг оси вращения может затем быть вычтена из измеренной скорости вращения вокруг оси вращения, чтобы вычислять смещение скорости вращения вокруг оси вращения.
в вышеупомянутом уравнении представляет скорректированные данные измерения вращения после удаления вычисленного смещения. Вычисленная скорость вращения вокруг оси вращения может затем быть вычтена из измеренной скорости вращения вокруг оси вращения, чтобы вычислять смещение скорости вращения вокруг оси вращения.
[79] Блок 506 навигации может затем принимать смещения скорости вращения и вычислять ориентацию транспортного средства 500, вычитая смещение из измерений скорости, и вычислять ориентацию с помощью скорректированных измерений скорости. Это может подразумевать считывание датчиков ускорения, чтобы определять локально измеренный вектор силы тяжести, т.е., компоненты ориентации, относящиеся к наклону относительно поперечной оси (251) и продольной оси (252) без вертикальной оси (253). Блок 506 навигации может затем вычислять матрицу направляющих косинусов (DCM), которая математически осуществляет полную 3-компонентную ориентацию расположения.
[80] Этот способ предоставляет возможность использования бюджетных датчиков для цели адекватного управления транспортным средством для горных работ, таким как горный комбайн для выемки длинными забоями, с точки зрения выравнивания забоя или автономной навигации других транспортных средств. В этом режиме, транспортное средство использует решение 'счисления пути', которое является аппроксимацией истинного пути посредством взятия множества линейных подвыборок ориентации и пройденного расстояния. Например, проецирование текущего направления с приращениями 0,5 м приведет в результате к профилю, который является практически таким же, что и взятый истинный путь.
[81] Для IMU/INS низкой точности вычисленное направление дрейфует значительно во время операций транспортного средства для горных работ и может изменяться значительно во время любых энергетических циклов или длительных периодов неподвижности транспортного средства для горных работ. Это изобретение привносит ряд способов для корректировки таких изменений направления и, таким образом, улучшения решения счисления пути.
[82] Оценка смещения и отслеживание
[83] Использование майтагирования, как объяснено выше, может корректировать погрешности смещения на двух из трех осей. Это улучшает точность датчика на порядок величины или более. Эти два измерения могут предоставлять достаточно информации, чтобы выполнять вычисления азимута в идеальных позициях, однако, существует широкий диапазон исключений. Оценка смещения и отслеживание третьей (майтага) оси предоставляет возможность использования уравнений стандартной инерциальной навигации по датчику, который обычно будет слишком шумным, чтобы выполнять такие вычисления.
[84] Обратная корректировка
[85] Во время периодов стационарности транспортное средство может более точно вычислять смещение по индивидуальным датчикам и, таким образом, вычислять более точную оценку направления. В период после прекращения движения транспортное средство может сравнивать вычисленное точное направление с направлением перед стационарностью. Если существует различие, транспортное средство может обратно распространять дифференциал на профиль, сформированный в этот момент.
[86] Прерываемые сегменты
[87] После отключения питания, или длительного периода стационарности, вычисленное направление может значительно различаться от направления, определенного в конце движения. В этом случае, транспортное средство может применять постоянное смещение дифференциала к предыдущему периоду движения или к текущему сегменту движения. Абсолютный профиль будет корректироваться с помощью процесса фиксации.
[88] Обновление при нулевой скорости
[89] Отметим, что раскрытое решение определения севера может быть объединено с дополнительными способами, чтобы увеличивать точность инерциальной навигации, такими как обновление при нулевой скорости. Для этого, транспортное средство 500 для подземных горных работ дополнительно содержит контроллер транспортного средства, который может быть объединен с другими компонентами, описанными в данном документе. Контроллер транспортного средства выполнен с возможностью останавливать транспортное средство и корректировать инерциальную навигационную систему, в то время как транспортное средство остановлено, на основе знания о том, что скорость транспортного средства равна нулю. Контроллер транспортного средства также инструктирует вращающему устройству вращать трехосный гироскоп, в то время как транспортное средство остановлено, и инструктировать интерфейсу 505 гироскопа вычислять первое, второе и третье смещения скорости вращения. Наконец, контроллер транспортного средства возобновляет перемещение транспортного средства на основе корректировок, полученных из обновления при нулевой скорости и из вычисленных смещений скорости вращения.
[90] Фильтр отслеживания смещения
[91] Дополнительно отмечается, что транспортное средство 500 может дополнительно содержать фильтр, соединенный с интерфейсом 505 гироскопа и выполненный с возможностью непрерывно отслеживать третье смещение скорости вращения. Фильтр может сравнивать текущее значение третьего смещения с предыдущими значениями, чтобы гарантировать, что не существует внезапных скачков. В частности, при пересечении патологической ориентации, отслеживающий фильтр может гарантировать, что смещение остается в приемлемом диапазоне, в то время как ориентация находится в патологическом случае. В одном примере, отслеживающий фильтр запрещает вычисления смещения и экстраполирует смещение до тех пор, пока транспортное средство не выйдет за пределы угла патологической ориентации.
[92] Устранение неоднозначностей
[93] В некоторых случаях, может быть неоднозначность, которая возникает из логического вывода смещения на неподвешенной карданно z-оси (третьей оси). Более конкретно, логический вывод смещения на неподвешенной карданно z-оси (третьей оси) основывается на решении . Это может предоставлять два корня уравнения и, следовательно, два возможных решения, представляющих неоднозначность.
[94] Интерфейс 505 гироскопа может удалять первоначальную оценку смещения z-оси (третьей оси), например, во время процедуры калибровки из измеренной z-оси (третьей оси). Интерфейс 505 гироскопа затем выбирает такое возможное решение, которое является ближайшим к этой оценке, в качестве корректного решения и, тем самым, предоставляет наибольшую точность, поскольку это решение определяется из точных смещений xy-оси (1-ой и 2-ой оси), измеренных, как описано выше.
[95] Кроме того, с таким первоначальным точным измерением смещения z-оси (третьей оси), интерфейс 505 гироскопа может отслеживать изменения в значении после этого посредством достаточно регулярных оценок ориентации, описанных в данном документе.
[96] Второй MEMS-гироскоп
[97] В одном примере, машина 500 для горных работ содержит второй трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства 500. В этом случае, блок 506 навигации соединяется со вторым трехосным MEMS-гироскопом и выполнен с возможностью принимать вторые данные измерения вращения от второго трехосного MEMS-гироскопа. Блок 506 навигации может затем вычислять ориентацию транспортного средства для подземных горных работ на основе вторых данных измерения вращения. Это предоставляет возможность разделения функции между первым и вторым трехосными MEMS-гироскопами, а именно, первый производит оценки смещения, подразумевающие использование майтагирования, как ранее описано, а второй предоставляет возможность непрерывного наблюдения за движением машины 500 для горных работ с погрешностями, которые должны быть компенсированы посредством оценок смещения от первого. Оценки смещения от первого происходят в подходящее время, когда машина 500 для горных работ является неподвижной, однако, машина 500 для горных работ не принуждается быть неподвижной, чтобы избегать искажения оценок смещения, когда второй трехосный MEMS-гироскоп обеспечивает непрерывное отслеживание ориентации. Эти разделенные роли могут быть взаимозаменяемыми. Дополнительные данные также привносят избыточность, которая может быть использована, чтобы минимизировать ошибку.
[98] Способ для вычисления ориентации
[99] Фиг. 7 иллюстрирует способ 700 для вычисления ориентации транспортного средства 500 для подземных горных работ. Способ может выполняться посредством множества блоков во взаимодействии, так что каждый блок выполняет некоторые этапы способа. В других примерах, способ выполняется посредством единственного контроллера, такого как микропроцессор, который программируется, чтобы выполнять способ 700.
[100] Способ 700 начинается вращением 701 трехосного MEMS-гироскопа вокруг оси вращения во множество различных ориентаций. Опять, это может быть выполнено посредством отправки процессором сигнала вращающему устройству, такого как сигнал, приводящий в действие шаговый мотор. Процессор затем принимает 702 данные измерения вращения от трехосного MEMS-гироскопа для многочисленных различных ориентаций. Это предоставляет возможность процессору вычислять 703 первое смещение скорости вращения трехосного MEMS-гироскопа относительно первой оси, отличной от оси вращения, на основе данных измерения вращения, и вычислять 704 второе смещение скорости вращения трехосного MEMS-гироскопа относительно второй оси, отличной от первой оси и отличной от оси вращения, на основе данных измерения вращения.
[101] Дополнительно, процессор может теперь использовать вычисленное первое смещение скорости вращения и второе смещение скорости вращения, чтобы корректировать данные измерения вращения. С помощью скорректированных данных процессор вычисляет 705 скорость вращения вокруг оси вращения. Важно, процессор затем вычисляет 706 третье смещение скорости вращения трехосного MEMS-гироскопа относительно оси вращения на основе первого смещения скорости вращения, второго смещения скорости вращения и вектора скорости вращения Земли, как описано выше. Наконец, процессор вычисляет 707 ориентацию транспортного средства для подземных горных работ на основе вектора скорости вращения Земли, первого смещения значения скорости вращения, второго смещения значения скорости вращения и третьего смещения значения скорости вращения.
[102] Как также описано выше, процессор может выполнять обновление при нулевой скорости, останавливая транспортное средство, корректируя инерциальную навигационную систему, в то время как транспортное средство остановлено, вращая трехосный гироскоп, в то время как транспортное средство остановлено, вычисляя первое, второе и третье смещения скорости вращения; и возобновляя движение транспортного средства на основе вычисленной ориентации. В одном примере, остановка транспортного средства содержит остановку транспортного средства более чем на 10 секунд и менее чем на 300 секунд перед возобновлением движения транспортного средства. В другом примере, остановка транспортного средства содержит остановку транспортного средства более чем на 50 секунд и менее чем на 200 секунд перед возобновлением движения транспортного средства. В еще одном примере, остановка транспортного средства содержит остановку транспортного средства более чем на 100 секунд и менее чем на 170 секунд перед возобновлением движения транспортного средства. Дополнительно, возобновление движения транспортного средства может содержать возобновление движения на более чем или равное нулю метров и менее 100 метров, например. В другом примере, возобновление движения транспортного средства содержит возобновление движения на менее чем 500 метров. В другом примере, возобновление движения транспортного средства содержит возобновление движения на менее чем 50 метров. В еще одном примере, возобновление движения транспортного средства содержит возобновление движения на менее чем 200 метров. В еще одном примере, возобновление движения транспортного средства содержит возобновление движения на менее чем 30 метров.
[103] Управление транспортным средством
[104] После того как ориентация транспортного средства является доступной, контроллер транспортного средства регулирует угол поворота управляемых колес, чтобы направлять транспортное средство 500 в желаемое местоположение в подземной шахте. Дополнительно, на основе предыдущей калибровки в фиксированную опорную точку, транспортное средство 500 для подземных горных работ может использовать инерциальный навигационный блок, чтобы определять абсолютное местоположение транспортного средства для подземных горных работ на основе ориентации. Т.е., навигационный блок добавляет вектор ориентации в масштабе текущей скорости к текущей позиции. Транспортное средство 500 для горных работ может также отправлять текущую позицию, ориентацию и скорость в наземный пункт управления, где эти данные могут быть отображены удаленному оператору.
[105] Отметим, что навигационные системы и способы, описанные в данном документе, могут быть использованы для навигации машинного оборудования под поверхностью и в оборудовании для подземных горных работ. Это может включать в себя транспортные средства для горных работ, самоходные вагонетки, выемочные комбайны непрерывного действия, бурильные машины, инструменты для выравнивания бура и т.д. в области горных работ, гражданского строительства и других.
[106] Будет понятно специалистам в области техники, что многочисленные разновидности и/или модификации могут быть выполнены в вышеописанных вариантах осуществления без отступления от широких общих рамок настоящего изобретения. Настоящие варианты осуществления, следовательно, должны рассматриваться во всех аспектах как иллюстративные и неограничивающие.
Транспортное средство для подземных горных работ содержит трехосный MEMS-гироскоп, установленный определенным образом, интерфейс гироскопа, подключенный к трехосному MEMS-гироскопу, блок навигации, подключенный к интерфейсу гироскопа. Для ориентации транспортного средства индексируют трехосный MEMS-гироскоп, принимают данные измерения вращения от трехосного MEMS-гироскопа для множества различных ориентаций, вычисляют множество параметров, относящихся к вращению MEMS-гироскопа и вектора скорости вращения Земли, останавливают транспортное средство, корректируют инерциальную навигационную систему, вращают трехосный гироскоп, вычисляют первое, второе и третье смещения скорости вращения, возобновляют движение транспортного средства на основе вычисленной ориентации. Обеспечивается повышение точности ориентации транспортного средства. 2 н. и 13 з.п. ф-лы, 7 ил.
1. Транспортное средство для подземных горных работ, содержащее:
трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ и установленный на вращающем устройстве, выполненном с возможностью индексировать трехосный MEMS-гироскоп вокруг оси вращения во множество различных ориентаций;
интерфейс гироскопа, подключенный к трехосному MEMS-гироскопу, выполненный с возможностью принимать данные измерения вращения от трехосного MEMS-гироскопа для множества различных ориентаций и дополнительно выполненный с возможностью
вычислять первое смещение скорости вращения трехосного MEMS-гироскопа относительно первой оси, по существу ортогональной оси вращения, на основе данных измерения вращения,
вычислять второе смещение скорости вращения трехосного MEMS-гироскопа относительно второй оси, по существу ортогональной первой оси и оси вращения, на основе данных измерения вращения,
вычислять скорректированную первую скорость вращения посредством корректировки данных измерения вращения с помощью первого смещения скорости вращения;
вычислять скорректированную вторую скорость вращения посредством корректировки данных измерения вращения с помощью второго смещения скорости вращения;
вычислять ожидаемую скорость вращения вокруг оси вращения посредством выполнения арифметической операции по вектору скорости вращения Земли, известному для заданного местоположения транспортного средства для подземных горных работ, скорректированной первой скорости вращения и скорректированной второй скорости вращения; и
вычислять третье смещение скорости вращения трехосного MEMS-гироскопа относительно оси вращения на основе вычисленной ожидаемой скорости вращения вокруг оси вращения; и
блок навигации, подключенный к интерфейсу гироскопа, выполненный с возможностью
принимать первое смещение скорости вращения, второе смещение скорости вращения и третье смещение скорости вращения от интерфейса гироскопа, и
вычислять ориентацию транспортного средства для подземных горных работ на основе вектора скорости вращения Земли, первого смещения скорости вращения, второго смещения скорости вращения и третьего смещения скорости вращения.
2. Транспортное средство для подземных горных работ по п. 1, дополнительно содержащее контроллер транспортного средства, соединенный с транспортным средством и выполненный с возможностью
останавливать транспортное средство;
корректировать инерциальную навигационную систему, в то время как транспортное средство остановлено;
инструктировать вращающему устройству вращать трехосный гироскоп, в то время как транспортное средство остановлено;
инструктировать интерфейсу гироскопа вычислять первое, второе и третье смещения скорости вращения; и
возобновлять движение транспортного средства на основе вычисленной ориентации.
3. Транспортное средство для подземных горных работ по п. 1 или 2, дополнительно содержащее трехосный акселерометр, соединенный с возможностью обмена данными с блоком навигации, при этом блок навигации выполнен с возможностью вычислять ориентацию на основе данных ускорения от трехосного акселерометра.
4. Транспортное средство для подземных горных работ по любому из предшествующих пунктов, при этом блок навигации является инерциальным блоком навигации и выполнен с возможностью определять абсолютное местоположение транспортного средства для подземных горных работ на основе ориентации.
5. Транспортное средство для подземных горных работ по любому из предшествующих пунктов, при этом интерфейс гироскопа выполнен с возможностью вычислять ожидаемую скорость  вращения вокруг оси вращения согласно
вращения вокруг оси вращения согласно  , где
, где  является величиной вектора скорости вращения Земли,
является величиной вектора скорости вращения Земли,  является скорректированной первой скоростью вращения вокруг первой оси и
является скорректированной первой скоростью вращения вокруг первой оси и  является скорректированной второй скоростью вращения вокруг второй оси, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
является скорректированной второй скоростью вращения вокруг второй оси, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
6. Транспортное средство для подземных горных работ по любому из предшествующих пунктов, дополнительно содержащее фильтр, соединенный с интерфейсом гироскопа и выполненный с возможностью непрерывно отслеживать третье смещение скорости вращения.
7. Транспортное средство для подземных горных работ по любому из предшествующих пунктов, дополнительно содержащее дополнительный трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ,
при этом блок навигации соединен с дополнительным трехосным MEMS-гироскопом и выполнен с возможностью принимать дополнительные данные измерения вращения от дополнительного трехосного MEMS-гироскопа и вычислять ориентацию транспортного средства для подземных горных работ на основе дополнительных данных измерения вращения.
8. Транспортное средство для подземных горных работ по любому из предшествующих пунктов, при этом
интерфейс гироскопа выполнен с возможностью вычислять ожидаемую скорость вращения вокруг оси вращения согласно , где является величиной вектора скорости вращения Земли, является скорректированной первой скоростью вращения вокруг первой оси и является скорректированной второй скоростью вращения вокруг второй оси, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно;
транспортное средство для подземных горных работ дополнительно содержит трехнаправленный акселерометр, соединенный с возможностью обмена данными с блоком навигации, и блок навигации выполнен с возможностью вычислять ориентацию на основе данных об ускорении от трехнаправленного акселерометра; и
транспортное средство для подземных горных работ дополнительно содержит дополнительный трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ, и блок навигации соединен с дополнительным трехосным MEMS-гироскопом и выполнен с возможностью принимать дополнительные данные измерения вращения от дополнительного трехосного MEMS-гироскопа и вычислять ориентацию транспортного средства для подземных горных работ на основе дополнительных данных измерения вращения.
9. Способ ориентации транспортного средства для подземных горных работ, причем способ содержит этапы, на которых:
индексируют трехосный MEMS-гироскоп, установленный в фиксированной позиции и ориентации относительно транспортного средства для подземных горных работ, вокруг оси вращения во множество различных ориентаций;
принимают данные измерения вращения от трехосного MEMS-гироскопа для множества различных ориентаций;
вычисляют первое смещение скорости вращения трехосного MEMS-гироскопа относительно первой оси, по существу ортогональной оси вращения, на основе данных измерения вращения;
вычисляют второе смещение скорости вращения трехосного MEMS-гироскопа относительно второй оси, по существу ортогональной первой оси и отличной от оси вращения, на основе данных измерения вращения,
вычисляют скорректированную первую скорость вращения посредством корректировки данных измерения вращения с помощью первого смещения скорости вращения;
вычисляют скорректированную вторую скорость вращения посредством корректировки данных измерения вращения с помощью второго смещения скорости вращения;
вычисляют ожидаемую скорость вращения вокруг оси вращения посредством выполнения арифметической операции по вектору скорости вращения Земли, известному для заданного местоположения транспортного средства для подземных горных работ, скорректированной первой скорости вращения и скорректированной второй скорости вращения; и
вычисляют третье смещение скорости вращения трехосного MEMS-гироскопа относительно оси вращения на основе вычисленной ожидаемой скорости вращения вокруг оси вращения;
вычисляют ориентацию транспортного средства для подземных горных работ на основе вектора скорости вращения Земли, первого смещения скорости вращения, второго смещения скорости вращения и третьего смещения скорости вращения;
останавливают транспортное средство;
корректируют инерциальную навигационную систему, в то время как транспортное средство остановлено;
вращают трехосный гироскоп, в то время как транспортное средство остановлено;
вычисляют первое, второе и третье смещения скорости вращения; и
возобновляют движение транспортного средства на основе вычисленной ориентации.
10. Способ по п. 9, при этом остановка транспортного средства содержит остановку транспортного средства более чем на 10 с и менее чем на 300 с перед возобновлением движения транспортного средства.
11. Способ по п. 9 или 10, при этом возобновление движения транспортного средства содержит возобновление движения на более чем или равное нулю метров и менее чем 100 м.
12. Способ по любому из пп. 9–11, при этом способ дополнительно содержит этап, на котором вычисляют компоненты ориентации, не связанные с направлением, на основе данных об ускорении от трехосного акселерометра.
13. Способ по любому из пп. 9–12, при этом способ дополнительно содержит этап, на котором определяют абсолютное местоположение транспортного средства для подземных горных работ на основе ориентации.
14. Способ по любому из пп. 9–13, при этом вычисление ожидаемой скорости вращения вокруг оси вращения содержит этап, на котором вычисляют , где является величиной вектора скорости вращения Земли, является скорректированной первой скоростью вращения вокруг первой оси и является скорректированной второй скоростью вращения вокруг второй оси, скорректированными посредством вычисленных первого и второго смещения скорости вращения, соответственно.
15. Способ по любому из пп. 9–14, при этом способ дополнительно содержит этап, на котором непрерывно отслеживают первое, второе и третье смещения скорости вращения.
| US 20050022402 A1, 03.02.2005 | |||
| US 20130211723 A1, 15.08.2013 | |||
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |

