Изобретение относится к измерительной технике и может найти применение для простого и быстрого измерения площадей потолка и определения формы потолка на основе сканирования близпотолочной поверхности стен внутри помещений. Наиболее близким аналогом является Измерительная система Leica 3D DISTO [http://www.geooptic.ru/product/leica-3d-disto], опубл.: 2012. Устройство позволяет вести работы с ценными породами дерева, натуральным камнем (столешницы, ступени, подиумы и т.д.), получать точные данные о любом изогнутом контуре (арочные окна, потолочные своды, двери, ниши в стенах). Принцип работы устройства основан на функции сканирования данных в реальном пространстве с последующей их передачей на компьютер или в планшет. Кроме того, аппарат может работать в качестве лазерного нивелира. Leica Disto 3D может работать в двух режимах: классического обмера (расчет расстояния между контрольными точками) и в режиме автоматического сканирования. После того как необходимые данные будут собраны, их можно совместить в трехмерное изображение. Для того чтобы ввести отдельные точки, пользуются режимом ручного управления: при наведении цифровой камеры с восьмикратным увеличением точка автоматически отображается на плане. Полученные данные переносятся в компьютер и используются для создания проекта. Затем полученный результат снова переносится на планшет и используется для разметки помещения. Leica 3D Disto оснащен пультом дистанционного управления и контрольной панелью - планшетом с сенсорным экраном. Они могут быть связаны при помощи кабеля или по радиоканалу.
Измерительный модуль Leica 3D Disto имеет подставку с уровнем, которая крепится на штативе, на подставке закреплен с возможностью горизонтального вращения посредством двигателя на 360 градусов корпус из двух колонок, между которыми закреплена визирная труба, вращающаяся также за счет двигателя вертикально и имеющая внутри лазерный дальномер и цифровой видоискатель (цифровая видеокамера). Прибор содержит датчик угла наклона, который служит компенсатором для сведения в горизонт и работает при углах наклона по уровню от 0 до 3 градусов. Каждый цифровой блок прибора соединен с его микропроцессором, способным передавать данные в режиме реального времени оператору.
Недостатком прибора является его высокая цена по причине сложной электроники и сложной системы наведения визирной линии прибора в нужную точку.
Между тем, например, для измерения внутри помещений площадей близпотолочных зон, которые необходимы для внутренней отделки помещений, например с целью монтажа натяжных потолков, использование такого дорого прибора себя не оправдывает. Кроме того, в случае постановки задачи сканировать автоматически поверхность стен близпотолочного пространства помещения, Leica 3D Disto требует предварительной калибровки и юстировки с использованием оператора, который через планшет отслеживает и наводит положение визира, перемещая указатель джойстика пальцем на планшете управления. Это усложняет процесс решения такой задачи и увеличивает время ее выполнения.
Задачей изобретения является создание решения, которое обеспечивает возможность получения данных о площади и форме потолка с достаточной точностью и более простым способом, чем это делают 3D лазерные сканеры.
Техническим результатом изобретения является возможность получения данных о площади и форме потолка, упрощение технологии измерения, упрощение средств измерения, ускорение процесса измерения близпотолочного пространства. Указанный технический результат достигается за счет того, что заявлен способ измерения линейных и угловых величин внутри помещения, характеризующийся использованием закрепленного на штативе измерительного устройства, которое способно вращаться на 360 градусов по вертикальной оси с использованием двигателя, имеет лазерный дальномер, каждый цифровой блок измерительного устройства соединяют с контролером, способным записывать данные на память и/или передавать данные в режиме реального времени оператору, отличающийся тем, что используют распорный штатив, упирая ось вращения в потолок, а моноштангу в пол, измерительный прибор устанавливают в распор между потолком и полом примерно в средней зоне помещения, при этом ось вращения устанавливают вертикально с отклонением вертикальной линии от уровня горизонта не более чем на 10 градусов, затем снимают показания с акселерометра и при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту, после чего лазерным дальномером выполняют замер расстояния от оси вращения до стены, данные записывают в память или передают на компьютер, после чего совершают сдвижение визирной линии лазерного дальномера на определенный угол в горизонтальной плоскости, причем поворот на заданный угол осуществляют в автоматическом режиме шаговым двигателем, и после каждого сдвижения цифровым контролером снимают показания с акселерометра и механического поворотного устройства, при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту, полученные данные о повороте на заданный угол и расстоянии записывают в память или передают на компьютер; данный цикл измерений и сдвижение повторяют до поворота измерительного прибора в горизонтальной плоскости на 360 градусов.
Предпочтительно, ось вращения прибора и ротор шагового мотора выполняют так, что они служат частью распорки.
Предпочтительно, моноштангу выполняют телескопической с возможностью плавного регулирования ее изменения по высоте.
Предпочтительно, на конце моноштанги и конце оси вращения устанавливают прокладки.
Краткое описание чертежей
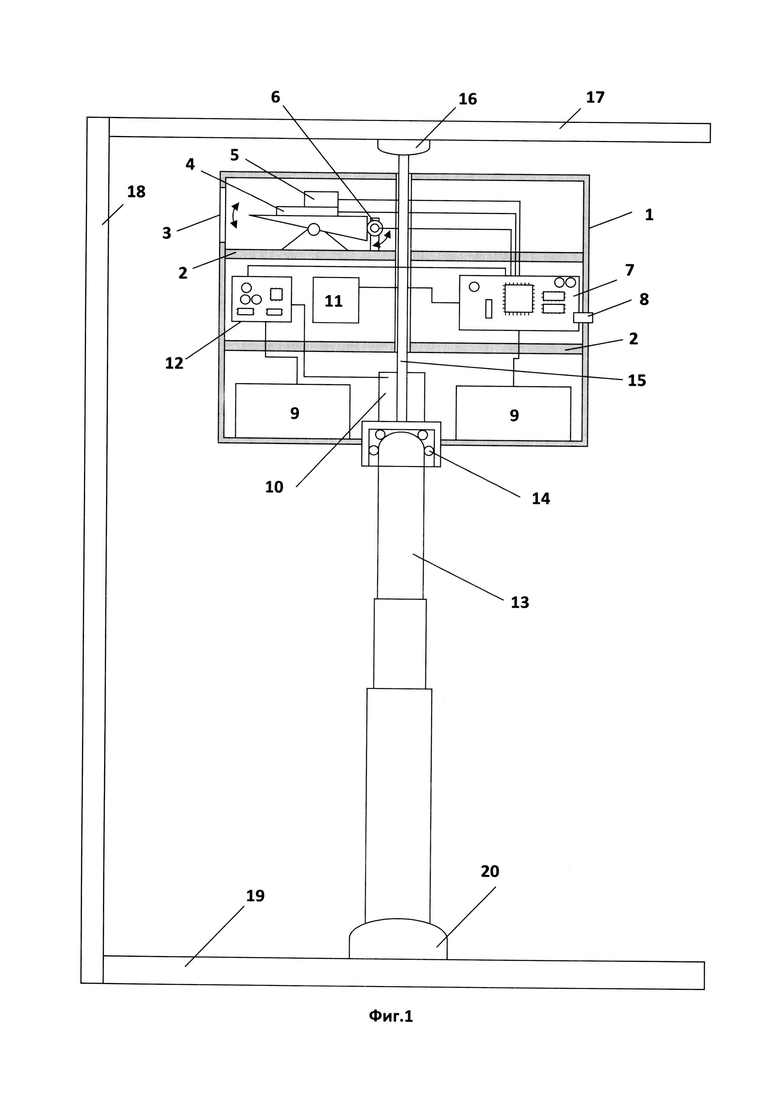
На Фиг. 1 показана блок-схема измерительного устройства.
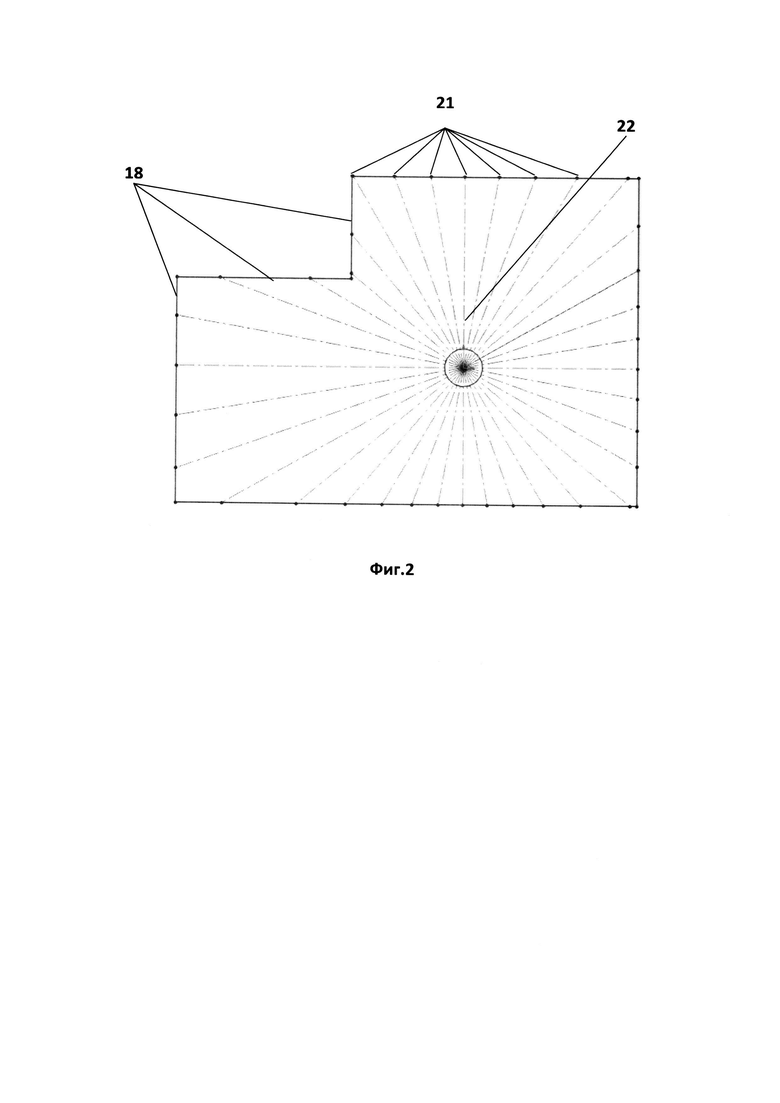
На Фиг. 2 показан пример обмера помещения.
Осуществление изобретения
Изобретение может быть реализовано следующим образом.
Измерение линейных и угловых величин внутри помещения проводят в полярной системе координат с использованием закрепленного на штативе 13 измерительного устройства (см. Фиг. 1), которое способно вращаться на 360 градусов по вертикальной оси. Вращение происходит за счет использования двигателя 10. Устройство измерения содержит лазерный дальномер 4. Каждый цифровой блок измерительного устройства соединяют с контролером 7, способным записывать данные на память и/или передавать данные в режиме реального времени оператору.
Новизной является то, что в приборе используют распорный штатив, упирая ось вращения 15 в потолок, а моноштангу 13 в пол. Для удобства распорки в пол и потолок на конце моноштанги 13 и конце оси вращения 15 устанавливают резиновые или пластиковые прокладки 20 и 16 соответственно.
При этом измерительный прибор устанавливают в распор между потолком 17 и полом 19 примерно в средней зоне помещения. Ось вращения устанавливают вертикально с отклонением вертикальной линии от уровня горизонта не более чем на 10 градусов. Измерения производят путем последовательных снятий показаний с акселерометра 5, при необходимости производят коррекцию положения визирной линии лазерного дальномера 4 по горизонту. Затем лазерным дальномером 4 выполняют замер расстояния от оси вращения 15 до стены 18. Полученные данные записывают в память или передают на компьютер. После чего совершают сдвижение визирной линии лазерного дальномера 4 на определенный угол в горизонтальной плоскости. Поворот на заданный угол осуществляют в автоматическом режиме шаговым двигателем 10, например на 2 градуса. Сдвижение шагового двигателя 10 на определенный угол может управляться, например, цифровым контролером 12.
После каждого сдвижения цифровым контролером 7 снимают показания с акселерометра 5 и механического поворотного устройства 6, при необходимости производят коррекцию положения визирной линии лазерного дальномера 4 по горизонту, если акселерометр 5 покажет отклонение. Полученные данные о повороте на заданный угол и расстоянии записывают в память или передают на компьютер.
Данный цикл измерений и сдвижение повторяют до поворота измерительного прибора в горизонтальной плоскости на 360 градусов.
Допустимо, что ось вращения 15 прибора и ротор шагового двигателя 10 выполняют так, что они служат частью распорки.
Моноштангу 13 по возможности выполняют телескопической с возможностью плавного регулирования ее изменения по высоте, что позволяет поднимать прибор на заданную высоту при соответствующей высоте потолков.
Пример обмера помещения представлен на Фиг. 2. Замерщик и прибор 22 располагается в центре помещения. После распора прибора и примерного выравнивания его по уровню или отвесу вертикально с отклонением вертикальной линии от уровня горизонта не более чем на 10 градусов, производят первый замер. При выполнении второго замера визир лазерного дальномера 4 уже будет смещен на заданный угол. В результате первых двух измерений получают данные о расстоянии от центра прибора 22 до двух точек стены 18 или разных стен 18 и угол между ними, равный углу сдвига прибора (шагу). Таким образом, измерения будут основаны на получении множества треугольников, для каждого из которых известны две стороны и угол между ними. Путем известных формул геометрии получают длину третьей стороны для каждого и формируют пространственные координаты точек 21 стен на плоскости исходя из того, что центр координат - это центр прибора 22.
В приборе каждый из блоков выполняет свою функцию.
Лазерный дальномер 4 производит измерение расстояния от прибора до стены 18 по сигналу от цифрового контролера 7 и передает данные на него же. Акселерометр (гироскоп) 5 или датчик положения в пространстве к горизонту - определяет угол наклона лазерного луча к горизонту, данные передает в цифровой контролер 7.
Привод коррекции 6 положения лазерного модуля 4 получает управляющие сигналы от цифрового контролера 7 и корректирует лазерный модуль 4 по горизонту. Цифровой контролер 7 получает данные отдатчиков, обрабатывает их и выполняет управление компонентами прибора.
Связь и передачу данных от прибора в персональный компьютер, планшет, телефон можно осуществить с помощью модуля беспроводной связи 11, например модуля Bluetooth.
При потребности вести проводную передачу данных, можно использовать USB-порт 8, который выполнить закрепленным на цифровом контролере 7, и соединяться через него кабелем с компьютером.
Шаговый двигатель 10 вращает корпус вокруг оси вращения с заданным шагом, например 2 градуса, управляется цифровым контролером. Ось (вал) вращения имеет жесткое соединение с ротором шагового двигателя и является его продолжением. Питание прибора осуществляется либо от розетки через адаптер, либо от блоков питания 9, установленных внутри прибора. При необходимости, корпус 1 прибора выполняют этажным, состоящим из перегородок 2, которые отделяют друг от друга блоки питания, блоки управления и блоки измерения и коррекции наклона. Перед лазерным дальномером 4 в корпусе 1 должно быть выполнено отверстие 3, чтобы лазерный луч прибора свободно выходил из корпуса.
Ось вращения 15 прибора и корпус шагового двигателя 10 могут быть жестко зафиксированы во вращающемся основании, которое через подшипник 14 зафиксировано к моноштанге 13.
Последовательность работы с прибором состоит в следующем.
Пользователь устанавливает прибор под потолком на распорном штативе, уперев ось вращения 15 в потолок, а моноштангу 13 в пол. Прибор устанавливается в распор между потолком и полом, при этом ось (вал) вращения прибора и ротор шагового мотора могут являться частью распорки.
С помощью отвеса или вертикального уровня устанавливают штатив 13 и распорку 15 так, чтобы ось вращения имела отклонение от вертикали до 10 градусов.
Далее пользователь включает и настраивает проводное или беспроводное соединение между цифровым контролером 7 прибора и ПК (планшет, телефон) оператора. Управление прибором осуществляется с ПК дистанционно, в том числе задание шага сдвижения в горизонтальной плоскости вращения.
Затем прибор включают в режим измерений. Далее прибор в автоматическом режиме выполняет замер помещения. Шаговый двигатель 10 поворачивает прибор вокруг оси на заданный угол, после каждого поворота выполняется коррекция лазерного модуля 4 по горизонту, затем выполняется замер расстояния от оси вращения до стены 18, данные передаются на ПК. Цикл повторяется до поворота прибора на 360 градусов. Так, при шаге в 2 градуса получится 180 замеров.
Полученные от прибора данные обрабатываются программой на ПК и записываются в любом удобном формате. Возможен сразу расчет координат и отрисовка по полученным координатам карты помещения (см. Фиг. 2).
Благодаря полученным данным о координатах близпотолочного пространства стен удается с достаточно высокой точностью получить данные о площади и форме потолка. Достаточная точность достигается за счет того, что прибор ставится примерно в центре помещения, что снижает ошибку, вызванную отклонением угла наклона визирной оси лазерного дальномера от 0 градусов. Связано это с тем, что даже при наличии угла наклона визирной оси в несколько градусов, при разнице расстояний от оси вращения прибора до стен в несколько метров, ошибка определения координат не превысит 1 см. Больший угол наклона визирной оси стабилизируется по данным акселерометра 5 с помощью привода коррекции 6 положения лазерного модуля 4, который получает управляющие сигналы от цифрового контролера 7 и корректирует лазерный модуль 4 по горизонту.
Благодаря исключению сложных цифровых систем управления и видеокамеры, упрощению системы стабилизации визирной оси в горизонтальном положении, отсутствию потребности иметь систему вращения в вертикальной плоскости для лазерного дальномера, благодаря работе прибора по замеру в одной плоскости близпотолочного пространства, упрощается технология измерения, упрощаются средства измерения, происходит ускорение процесса измерения близпотолочного пространства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ КРЕПЛЕНИЯ НАТЯЖНОГО ПОТОЛКА | 2015 |
|
RU2629280C2 |
| СПОСОБ КРЕПЛЕНИЯ НАТЯЖНОГО ПОТОЛКА | 2013 |
|
RU2524060C1 |
| СТАНОК ДЛЯ УСТАНОВКИ КРЕПЛЕНИЙ НА ПОЛОТНО ДЛЯ НАТЯЖНОГО ПОТОЛКА | 2016 |
|
RU2644362C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| ВИДЕОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2584370C2 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2015 |
|
RU2609275C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧЕРЕПА | 2011 |
|
RU2456915C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР С РАСШИРЕННЫМИ ФУНКЦИЯМИ | 2008 |
|
RU2381446C1 |
Изобретение относится к измерительной технике и может найти применение для простого и быстрого измерения площадей потолка и определения формы потолка на основе сканирования близпотолочной поверхности стен внутри помещений. Заявленный способ измерения линейных и угловых величин внутри помещения характеризуется использованием закрепленного на штативе измерительного устройства, которое способно вращаться на 360 градусов по вертикальной оси с использованием двигателя и имеет лазерный дальномер. Каждый цифровой блок измерительного устройства соединяют с контролером, способным записывать данные на память и/или передавать данные в режиме реального времени оператору. Причем для измерения линейных и угловых величин внутри помещения используют распорный штатив, упирая ось вращения в потолок, а моноштангу в пол. Измерительный прибор устанавливают в распор между потолком и полом примерно в средней зоне помещения, при этом ось вращения устанавливают вертикально с отклонением вертикальной линии от уровня горизонта не более чем на 10 градусов. Затем снимают показания с акселерометра и при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту, после чего лазерным дальномером выполняют замер расстояния от оси вращения до стены, а данные записывают в память или передают на компьютер. После этого совершают сдвижение визирной линии лазерного дальномера на определенный угол в горизонтальной плоскости. Причем поворот на заданный угол осуществляют в автоматическом режиме шаговым двигателем, и после каждого сдвижения цифровым контролером снимают показания с акселерометра и механического поворотного устройства, а при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту. Полученные данные о повороте на заданный угол и расстоянии записывают в память или передают на компьютер. Данный цикл измерений и сдвижение повторяют до поворота измерительного прибора в горизонтальной плоскости на 360 градусов. Технический результат - возможность получения данных о площади и форме потолка, упрощение технологии измерения, упрощение средств измерения, ускорение процесса измерения близпотолочного пространства. 3 з.п. ф-лы, 2 ил.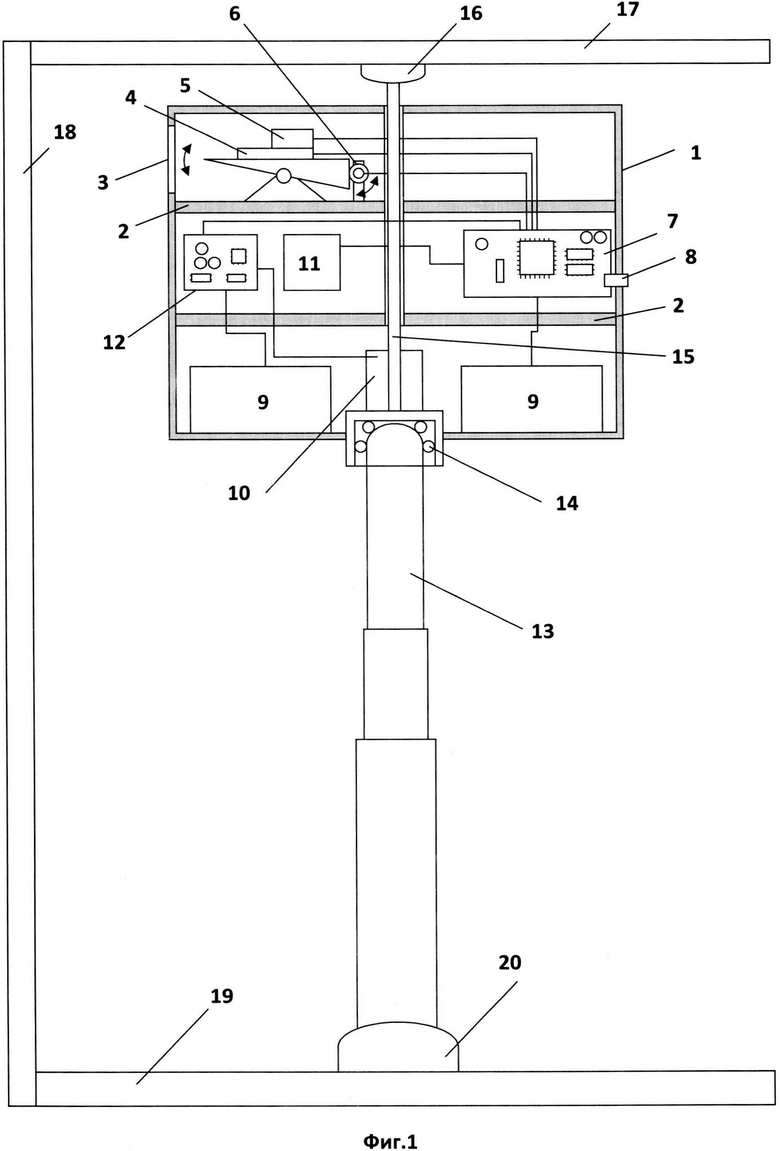
1. Способ измерения линейных и угловых величин внутри помещения, характеризующийся использованием закрепленного на штативе измерительного устройства, которое способно вращаться на 360 градусов по вертикальной оси с использованием двигателя, имеет лазерный дальномер, каждый цифровой блок измерительного устройства соединяют с контролером, способным записывать данные на память и/или передавать данные в режиме реального времени оператору, отличающийся тем, что используют распорный штатив, упирая ось вращения в потолок, а моноштангу в пол, измерительный прибор устанавливают в распор между потолком и полом примерно в средней зоне помещения, при этом ось вращения устанавливают вертикально с отклонением вертикальной линии от уровня горизонта не более чем на 10 градусов, затем снимают показания с акселерометра и при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту, после чего лазерным дальномером выполняют замер расстояния от оси вращения до стены, данные записывают в память или передают на компьютер, после чего совершают сдвижение визирной линии лазерного дальномера на определенный угол в горизонтальной плоскости, причем поворот на заданный угол осуществляют в автоматическом режиме шаговым двигателем, и после каждого сдвижения цифровым контролером снимают показания с акселерометра и механического поворотного устройства, при необходимости производят коррекцию положения визирной линии лазерного дальномера по горизонту, полученные данные о повороте на заданный угол и расстоянии записывают в память или передают на компьютер; данный цикл измерений и сдвижение повторяют до поворота измерительного прибора в горизонтальной плоскости на 360 градусов.
2. Способ по п. 1, отличающийся тем, что ось вращения прибора и ротор шагового двигателя выполняют так, что они служат частью распорки.
3. Способ по п. 1, отличающийся тем, что моноштангу выполняют телескопической с возможностью плавного регулирования ее изменения по высоте.
4. Способ по п. 1 или 3, отличающийся тем, что на конце моноштанги и конце оси вращения устанавливают прокладки.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Шарошка бурового долота | 1956 |
|
SU108836A1 |
| Теребильная цепь свеклокомбайна | 1952 |
|
SU97517A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР С РАСШИРЕННЫМИ ФУНКЦИЯМИ | 2008 |
|
RU2381446C1 |
| US 7755360 B1, 13.07.2010.. | |||

