Правительственные права на лицензию
Правительство США может иметь определенные права на настоящее изобретение, что предусмотрено условиями договора генерального подряда №DTFACT-10-C-00013, заключенного Федеральным управлением гражданской авиации США (FAA) с правительством США.
Уровень техники
Наземные системы дифференциальной коррекции глобальных навигационных спутниковых систем могут потребовать установки на своих наземных станциях мониторов контроля ионосферных вариаций (IGM) с целью идентификации вариаций задержки сигналов, обусловленных резкими изменениями электронной плотности ионосферы. Пример одного из таких мониторов типа IGM описан в патенте США №8094064 под названием «Наземная система и способ отслеживания чрезмерных вариаций задержки», который полностью включен в настоящее изобретение посредством ссылки, и который далее по тексту именуется «Патент "064». Если говорить в общих чертах, то монитор IGM выдает предупредительный сигнал тревоги или команду на исключение, предписывающую наземной станции прекратить или исключить использование определенного навигационного спутника в случае выявления монитором IGM превышения этим спутником некоего порогового значения.
Одна из существующих проблем заключается в том, что определенные условия окружающей среды могут иногда способствовать принятию монитором IGM ошибочного решения, выраженного в виде ложного аварийного сигнала. Например, в некоторых местах тепловая турбулентность в тропосфере вблизи наземной станции может создавать помехи для контрольного приемника, что приводит к появлению в IGM ложного аварийного сигнала. Ложные аварийные сигналы IGM предписывают наземной станции исключить из расчета определенный спутник, даже если сигнал с этого спутника по-прежнему пригоден для использования.
По причинам, указанным выше, а также по причинам, перечисленным ниже, которые станут понятны специалистам в данной области техники после ознакомления с данным описанием, существующая техника нуждается в усовершенствованных системах и способах отслеживания ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций.
Сущность изобретения
Варианты осуществления настоящего изобретения предлагают способы и системы отслеживания ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций. Они станут понятными после ознакомления с описанием, представленным ниже.
В одном из вариантов осуществления настоящего изобретения способ минимизации ложных сигналов о недопустимых вариациях, реализуемый в станциях наземной системы дифференциальной коррекции (GBAS) для навигационной спутниковой системы, которые укомплектованы множеством контрольных приемников, получающих сигналы с навигационной спутниковой системы, включает следующие стадии: генерирование аварийного сигнала монитором контроля ионосферных вариаций (IGM), установленным на наземной станции GBAS; выяснение, не является ли аварийный сигнал ложным, исходя из данных, выведенных по результатам фазовых измерений несущей частоты, которые получены с множества контрольных приемников навигационной спутниковой системы; и блокирование аварийного сигнала в течение по меньшей мере первого временного интервала исходя из результатов выяснения.
Краткое описание чертежей
Варианты осуществления настоящего изобретения станут более доступными для понимания, а их преимущества и сферы применения в будущем станут более очевидными, если рассматривать их в привязке к описанию предпочтительных вариантов реализации заявленного изобретения и прилагаемым чертежам, где:
на фиг. 1 представлена блок-схема, иллюстрирующая наземную станцию, которая отслеживает чрезмерные вариации задержки спутниковых сигналов согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 2 представлена блок-схема, иллюстрирующая модуль обработки данных, в котором реализована схема обнаружения ложных аварийных сигналов согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 3 представлена блок-схема, иллюстрирующая пары контрольных приемников согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 4 представлена блок-схема, иллюстрирующая модуль обработки данных, в котором реализована иная схема обнаружения ложных аварийных сигналов согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 5 представлена блок-схема, иллюстрирующая модуль обработки данных, в котором реализована еще одна схема обнаружения ложных аварийных сигналов согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 6 представлена блок-схема, иллюстрирующая процесс обнаружения ложных аварийных сигналов согласно одному из вариантов осуществления настоящего изобретения.
Согласно установившейся практике различные описанные признаки вычерчены не в масштабе, а таким образом, чтобы выделить характерные особенности, относящиеся к примерам реализации настоящего изобретения. Одинаковые элементы на всех чертежах и по всему тексту обозначены одними и теми же номерами позиций.
Подробное описание изобретения
В подробном описании, представленном ниже, сделаны ссылки на прилагаемые чертежи, которые являются неотъемлемой частью настоящего изобретения и на которых проиллюстрированы конкретные примеры реализации настоящего изобретения. Эти варианты реализации заявленного изобретения описаны достаточно подробно, чтобы настоящее изобретение могло быть на практике реализовано специалистами в данной области техники; при этом следует понимать, что могут быть использованы и другие варианты реализации настоящего изобретения и что возможны изменения в его логической, механической и электрической части без отступления от объема настоящего изобретения. Соответственно, подробное описание, представленное ниже, не следует рассматривать в ограничивающем смысле.
Варианты осуществления настоящего изобретения предлагают способы и системы идентификации после выдачи монитором контроля ионосферных вариаций (IGM) ложного аварийного сигнала и использования этой информации для предотвращения исключения из расчета спутника глобальной навигационной системы, обусловленного таким ложным аварийным сигналом с IGM, или по меньшей мере для задержки принятия такого решения наземной станцией.
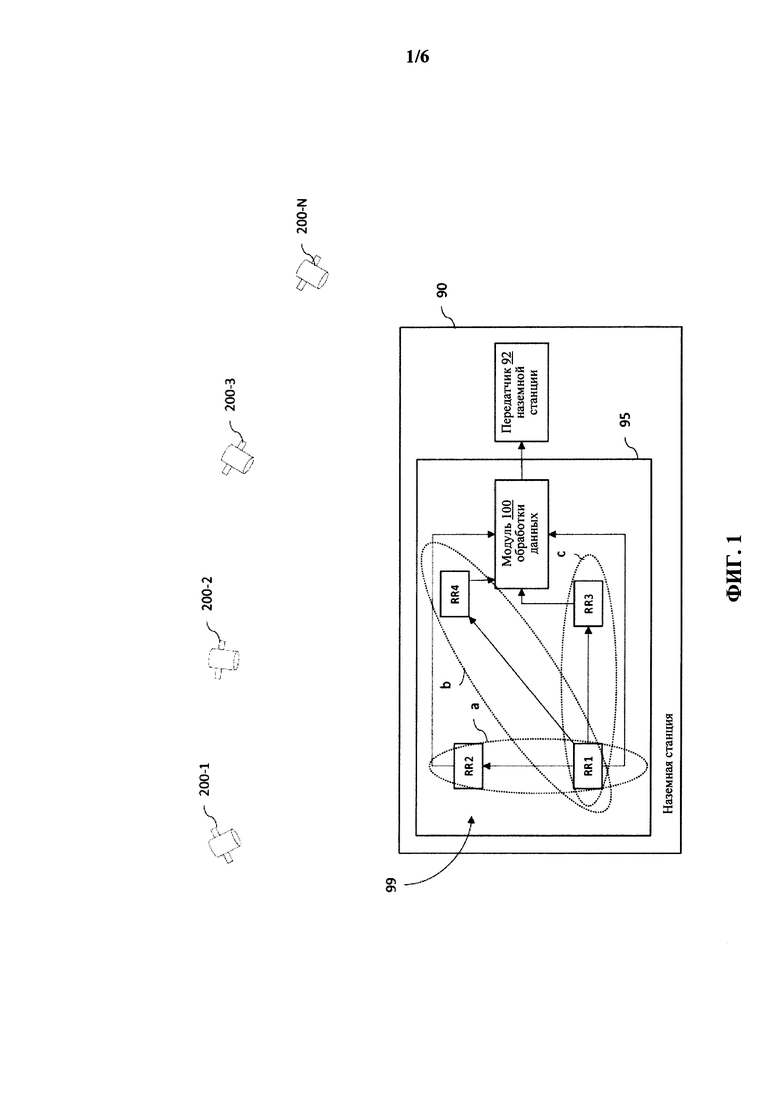
На фиг. 1 представлена блок-схема, иллюстрирующая наземную станцию (90) системы GBAS (наземной системы дифференциальной коррекции), такую как наземная станция службы управления заходами на посадку типа D (GAST D), согласно одному из вариантов реализации заявленного изобретения. В одном из вариантов осуществления настоящего изобретения наземная станция (90) содержит монитор контроля ионосферных вариаций, который отслеживает чрезмерные вариации задержки спутниковых сигналов, как это описано в патенте ʹ064. Как показано на фиг. 1, в состав наземной станции (90) входит монитор (95) контроля вариаций задержки по горизонтали (также именуемый в настоящем документе «Монитор контроля ионосферных вариаций» или «IGM») и передатчик (92) наземной станции. Передатчик (92) наземной станции является той частью наземной станции (90), которая передает сигналы на самолет, находящийся в непосредственной близости от указанной наземной станции (90). Монитор (95) контроля вариаций ионосферной задержки по горизонтали отслеживает чрезмерную вариацию задержки, присутствующую в горизонтальной плоскости, в отношении сигналов, передаваемых с отслеживаемого спутника глобальной навигационной системы, такого как один из спутников (200-1 - 200-N). В одном из вариантов осуществления настоящего изобретения спутники (200-1 - 200-N) представляют собой спутники глобальной системы позиционирования (GPS).
Монитор IMG (95) содержит по меньшей мере два контрольных приемника (вместе именуемые в настоящем документе «Контрольные приемники (99)») с известным взаимным расположением относительно друг друга и модуля (100) обработки данных. Вариант реализации настоящего изобретения, проиллюстрированный на фиг. 1, содержит четыре контрольных приемника (показанные по отдельности, и обозначенных как RR1 - RR4). В одном из вариантов осуществления настоящего изобретения вариация задержки по горизонтали представляет собой горизонтальную составляющую, которая лежит в плоскости, заключающей в себя контрольные приемники (99). Модуль (100) обработки данных коммуникативно связан с каждым из контрольных приемников (99). Во время работы монитор (95), отслеживающий вариации задержки по горизонтали, принимает сигналы по меньшей мере с двух спутников (200-1 - 200-N).
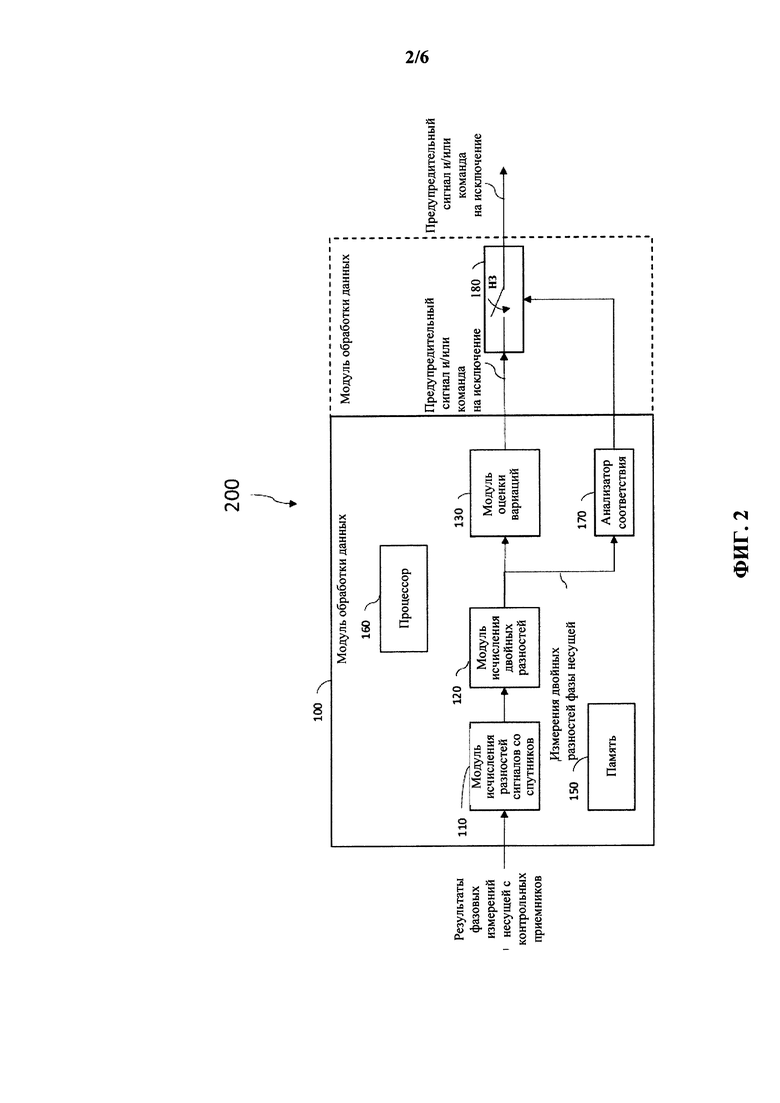
На фиг. 2 представлена блок-схема, иллюстрирующая интегрирование схемы (200) минимизации ложных аварийных сигналов на основе контроля соответствия с модулем (100) обработки данных согласно одному из вариантов осуществления настоящего изобретения. Как показано на фиг. 2, модуль (100) обработки данных содержит модуль (110) исчисления разностей сигналов со спутников, модуль (120) исчисления двойных разностей, модуль (130) оценки вариаций, запоминающее устройство (150) и по меньшей мере один процессор (160); при этом каждое из указанных устройств функционирует так, как это описано в патенте ʺ064, отслеживая результаты фазовых измерений несущей частоты, полученные с контрольных приемников (99) и выдавая предупредительные сигналы и/или команды на исключение (вместе именуемые в настоящем документе «Аварийные сигналы IGM»). По причинам, указанным ниже, для реализации схемы минимизации ложных аварийных сигналов на основе контроля соответствия используется три или более контрольных приемников
Модуль (110) исчисления разностей сигналов со спутников, модуль (120) исчисления двойных разностей, модуль (130) оценки вариаций и прочие элементы модуля (100) обработки данных, описанные в настоящем изобретении, могут быть реализованы в виде программных модулей, исполняемых процессором (160). В одном из вариантов осуществления настоящего изобретения память (150) содержит машиночитаемый носитель, заключающий в себе закодированные машинные команды, обеспечивающие выполнение модулем (100) обработки данных своих функций, описанных в настоящем документе. Соответственно, следует понимать, что в одном модуле могут быть объединены и реализованы два или более из этих элементов. Модуль (110) исчисления разностей сигналов со спутников коммуникативно связан с модулем (120) исчисления двойных разностей для передачи последнему исходных данных. Модуль (120) исчисления двойных разностей коммуникативно связан с модулем (130) оценки вариаций для передачи последнему исходных данных. Процессор (160) и запоминающее устройство (150) коммуникативно связаны с прочими элементами модуля обработки данных, как это требуется для выполнения функций, описанных в настоящем документе.
Память (150) может представлять собой любое стационарное запоминающее устройство подходящего типа, предназначенное для хранения данных, как из числа хорошо известных на сегодняшний день, так и из числа разработанных позднее. В этой связи память (150) может представлять собой, например, оперативные запоминающие устройства (ОЗУ), энергонезависимое запоминающее устройство, постоянное запоминающее устройство (ПЗУ) и/или регистраторы, встроенные в процессор (160). В одном из вариантов осуществления настоящего изобретения процессор (160) представляет собой микропроцессоры или микроконтроллеры. Более того, хотя процессор (160) и запоминающее устройство (150) показаны на фиг. 1 как отдельные элементы, в одном из вариантов осуществления настоящего изобретения процессор (160) и запоминающее устройство (150) реализованы в виде единого устройства (например, единой интегральной схемы). В одном из вариантов осуществления настоящего изобретения процессор (160) содержит микросхемы поддержки процессора и/или микросхемы поддержки системы, такие как специализированные заказные интегральные схемы (СИС).
Как описано в патенте ʹ064 и в общих чертах суммировано в настоящем изобретении, модуль (110) исчисления разностей сигналов со спутников определяет разницу в измерениях фазы несущей частоты между сигналами, поступающими с отслеживаемого спутника и по меньшей мере с одного другого спутника. Результаты фазовых измерений несущей частоты поступают в модуль (110) исчисления разностей с контрольных приемников (99). Модуль (110) исчисления разностей определяет разности в результатах фазовых измерений несущей частоты между радиочастотными сигналами, полученными контрольными приемниками (99) с отслеживаемого спутника (такого как, например, спутник (200-1)), и радиочастотными сигналами, полученными контрольными приемниками (99), по меньшей мере с одной из подгруппировок прочих спутников. Модуль (120) исчисления двойных разностей образует двойные разности между парами контрольных приемников (99) (такими, как пары «а», «b» или «с», показанные на фиг. 1; или как пары «а»-«f», показанные на фиг. 3). Модуль (120) исчисления двойных разностей коммуникативно связан с модулем (130) оценки вариаций для передачи последнему исходных данных. Исходные данные, передаваемые в модуль (130) оценки вариаций представляют собой усредненные компенсированные (в том числе по модулю) двойные разности, которые в настоящем документе также называются двойными разностями фазы несущей. Усредненные компенсированные двойные разности передаются в модуль (130) оценки вариаций. Модуль (130) оценки вариаций оценивает величину вариации задержки по горизонтали, обусловленной ионосферной вариацией между отслеживаемым спутником (200-1) и парами контрольных приемников (99). Вариация задержки по горизонтали может быть также обусловлена другими условиями, вызывающими аномалию сигнала.
Модуль (130) оценки вариаций выдает аварийный сигнал IMG, если вычисленная величина вариации задержки по горизонтали превышает заданный пороговый уровень. Аварийный сигнал IMG может представлять собой предупредительный сигнал и/или команду на исключение. В одном из вариантов осуществления настоящего изобретения монитор IGM (95) отсылает на передатчик (92) наземной станции команду на исключение. В другом варианте осуществления настоящего изобретения монитор IGM (95) отсылает на передатчик (92) наземной станции предупредительный сигнал. В еще одном из вариантов осуществления настоящего изобретения монитор IGM (95) передает на наземную станцию (90) аварийный сигнал IGM; при этом наземная станция (90) коммуникативно связана с дисплеем для предупреждения диспетчера управления воздушным движением на основании выданного аварийного сигнала IGM. В одном из вариантов осуществления настоящего изобретения наземная станция (90) совершает действия по прекращению передачи или по исключению отслеживаемых спутников, затронутых негативным воздействием, из группировки, обеспечивающей передачу навигационных данных на самолет, если вычисленная вариация по меньшей мере одного из отслеживаемых спутников превышает заданный пороговый уровень.
Для реализации схемы минимизации ложных аварийных сигналов на основе контроля соответствия модуль (100) обработки данных также содержит анализатор (170) соответствия, который получает данные о двойных разностях фазы несущей, сгенерированных в модуле (120) исчисления двойных разностей для различных пар контрольных приемников, и анализирует данные о двойных разностях фазы несущей для выявления несоответствий между парами контрольных приемников с целью получения величины соответствия. Поскольку сравниваются по меньшей мере две группы пар контрольных приемников, для такой схемы необходимо, как минимум, три контрольных приемника. При выявлении чрезмерных несоответствий анализатор (170) соответствия активирует замыкатель (180), который прерывает дальнейшее распространение выходного аварийного сигнала IGM, сгенерированного в модуле (130) оценки вариаций. Если же никаких чрезмерных несоответствий не выявлено, то любой сгенерированный аварийный сигнал IGM передается дальше, давая основание для исключения из расчета спутника, затронутого негативным воздействием. Следует понимать, что термин «замыкатель» в данном контексте не ограничивается обозначением электромеханических реле, а охватывает электронные устройства на твердотельных элементах, транзисторные и логические схемы, а также технологии коммутационных устройств на интегральных схемах. Как показано на фиг. 2, замыкатель (180) может быть встроен в модуль (100) обработки данных, или же он может представлять собой внешнее устройство по отношению к модулю (100) обработки данных.
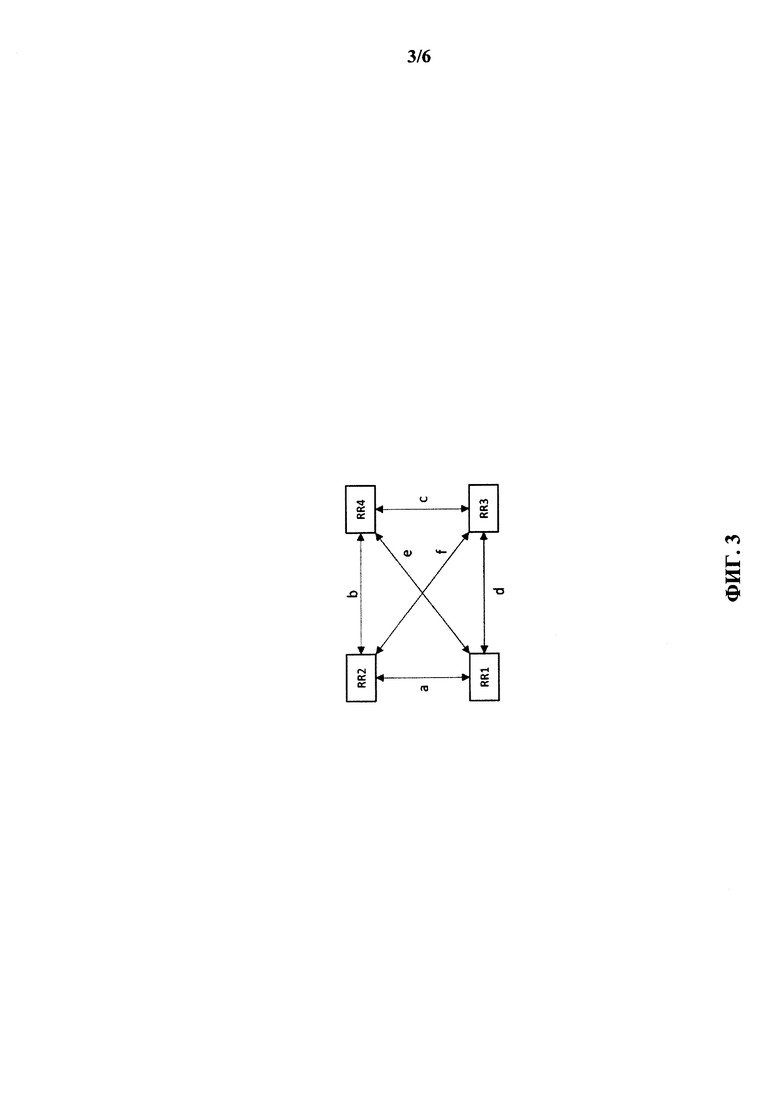
В данном контексте термин «контроль соответствия» относится к измерению любого несоответствия в данных о двойных разностях фазы несущей между парами контрольных приемников (99) наземной станции (90). Например, в одном из вариантов осуществления настоящего изобретения полученная двойная разность фазы несущей между парой контрольных приемников может быть разделена на расстояние между контрольными приемниками. Это должно привести к нормализации значения двойной разности фазы несущей с тем, чтобы можно было сравнить пары контрольных приемников, находящихся друг от друга на разных расстояниях. Контрольные приемники (99) представлены на фиг. 3, где спаренные приемники обозначены стрелками «а»-«f». Иными словами, например, пара «а» содержит контрольные приемники RR1 и RR2, пара «b» содержит контрольные приемники RR2 и RR4 и т.д. Как подробнее описано в патенте ʹ064, значения двойных разностей фазы несущей для всех этих пар вычисляются в модуле (120) исчисления двойных разностей и передаются в модуль (130) оценки вариаций. При значительной и долговременной вариации, обусловленной условиями окружающей среды, такая вариация должна быть настолько заметной в значениях двойных разностей фазы несущей для каждой их указанных пар, чтобы можно было утверждать, что эти пары реагируют сообразно. Иначе говоря, если аварийный сигнал IGM является реальным, а не ложным, в данных между одной парой контрольных приемников (например, парой «а») и в данных между второй парой контрольных приемников (например, парой «с») не должно быть никого заметного несоответствия. Таким образом, величина погрешности соответствия определена как функция дельты значений двойных разностей фазы несущей между парами контрольных приемников. Идеальное соответствие значений двойных разностей фазы несущей дает значение соответствия, равное нулю.
Таким образом, анализатор (170) соответствия использует информацию о соответствии, полученную от пар контрольных приемников, с тем чтобы определить, не являются ли аварийные сигналы IGM ложными. Он устанавливает несоответствие в результатах измерений между первой парой контрольных приемников и второй парой контрольных приемников, после чего принимает решение, считать ли аварийный сигнал IGM ложным или нет. Если наблюдается высокая погрешность соответствия, превышающая заданный порог, то такая погрешность является свидетельством определенного несоответствия или проблемы с информацией, используемой модулем (100) обработки данных для генерирования аварийных сигналов IMG, а также того, что любой аварийный сигнал IMG, генерируемый в данный момент времени модулем (100) обработки данных, скорее всего, является ложным.
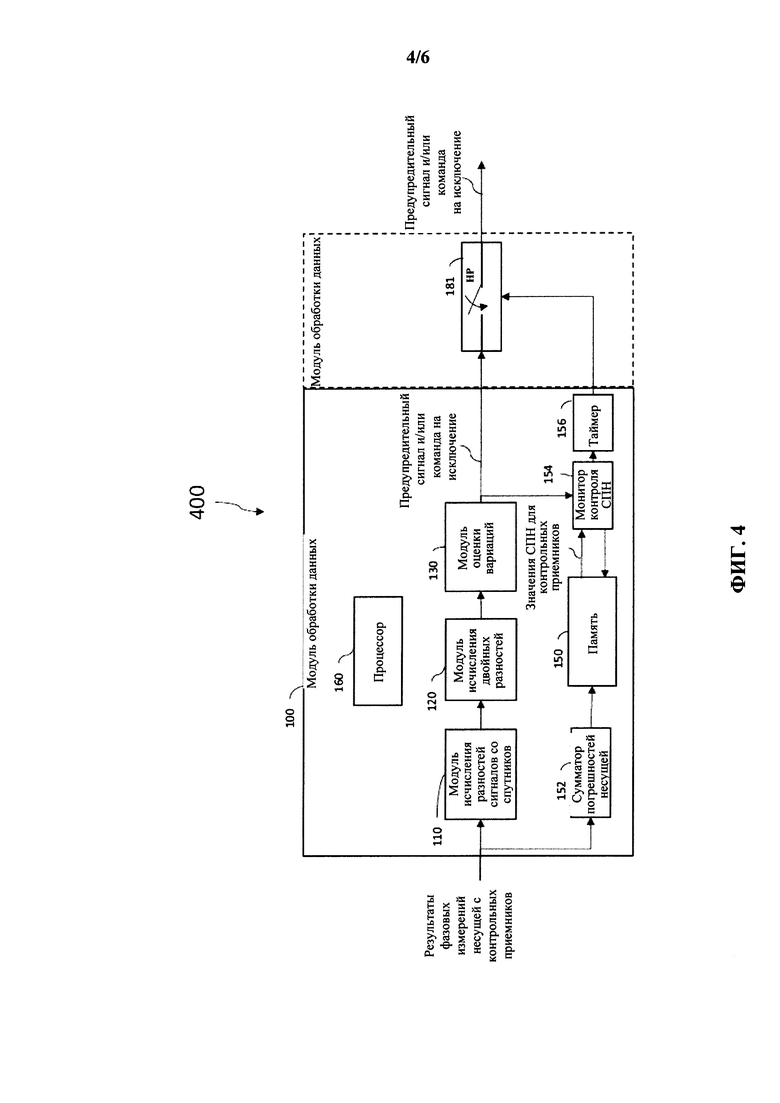
На фиг. 4 представлена блок-схема альтернативного варианта осуществления настоящего изобретения, иллюстрирующая интегрирование схемы (400) минимизации ложных сигналов, основанной на контроле суммарной погрешности несущей (СПН), с модулем (100) обработки данных, описанным выше. Вместо использования данных по двойным разностям фазы несущей и применения анализатора (170) соответствия, может быть использовано измерение суммарной погрешности несущей для каждого из контрольных приемников (99). В варианте осуществления настоящего изобретения, проиллюстрированном на фиг. 4, результаты фазовых измерений несущей, полученные с контрольного приемника (99), передаются в сумматор (152) погрешностей несущей, который сохраняет значение СПН по каждому из контрольных приемников (99) в запоминающем устройстве (150). Эти значения используются монитором (154) контроля СПН, чтобы определить, можно ли считать аварийный сигнал IMG, сгенерированный модулем (130) оценки вариаций, ложным или нет. В частности, монитор (154) контроля СПН отслеживает изменения в значениях СПН в динамике по времени и решает, разрешить ли дальнейшее распространение этого сигнала или заблокировать его. Поскольку эта схема минимизации ложных аварийных сигналов, основанная на контроле СПН, не зависит от сравнения данных, полученных с разных пар контрольных приемников, она может быть реализована в наземной станции, укомплектованной по меньшей мере двумя контрольными приемниками. Во время работы, когда модуль (130) оценки вариаций инициирует аварийный сигнал IMG, этот аварийный сигнал передается как на монитор (154) контроля СПН, так и на замыкатель (181), который управляется монитором (154) контроля СПН. Замыкатель (181) находится в «нормально разомкнутом» состоянии, т.е. в состоянии, которое обеспечивает блокирование дальнейшее прохождение аварийного сигнала IMG до тех пор, пока с монитора (154) контроля СПН не будет получен разрешающий сигнал. Когда монитор (154) контроля СПН обнаруживает наличие аварийного сигнала IMG, он начинает проверку значений СПН, сохраненных в запоминающем устройстве (150). Если монитор (154) контроля СПН обнаруживает какое-либо изменение в проверяемых значениях СПН, которое превышает заданный пороговый уровень, это трактуется как свидетельство того, что имеется веская причина для исключения из расчета соответствующего навигационного спутника. Замыкатель (181) срабатывает в том смысле, что он разблокирует дальнейшее прохождение аварийного сигнала IGM и инициирует процесс исключения из расчета навигационного спутника, затронутого негативным воздействием. Как показано на фиг. 4, замыкатель (181) может быть встроен в модуль (100) обработки данных, или же он может представлять собой внешнее устройство по отношению к модулю (100) обработки данных.
Как было указано выше, в запоминающем устройстве (150) сохраняется значение СПН по каждому из контрольных приемников (99) и по каждому из спутников (200-1) - (200-N). В это связи монитором (154) контроля СПН может быть использовано несколько возможных триггеров СПН. Например, в одном из вариантов осуществления настоящего изобретения, если изменение какого-либо из значений СПН превышает заданный порог, то срабатывает замыкатель (181), который разблокирует прохождение аварийного сигнала IGM дальше. Примером допустимого порогового уровня может служить изменение СПН приблизительно на 1,5 метра за период ожидания в 100 секунд, хотя приемлемые результаты может обеспечить и иной порог. В других вариантах реализации заявленного изобретения должны быть отслежены изменения в двух, трех или всех четырех значениях СПН до того, как монитор (154) контроля СПН инициирует срабатывание замыкателя (181) для обеспечения дальнейшего прохождения аварийного сигнала IGM. В некоторых других вариантах осуществления настоящего изобретения для определения возможности дальнейшего прохождения аварийного сигнала IGM следует объединить или усреднить два или более значений СПН, или выполнить иной статистический анализ.
Поскольку на суммарную погрешность несущей могут негативно влиять несколько факторов, ее пригодность для выявления ложных аварийных сигналов IGM в действительности уменьшается с течением времени по мере фиксации все более продолжительных изменений в значениях СПН. Соответственно, монитор (154) контроля СПН координирует срабатывание замыкателя (181) с помощью таймера (156) (который может быть встроен в монитор (154) контроля СПН или же представлять собой внешнее по отношению к нему устройство). Таймер (156) служит для того, чтобы незатухающий аварийный выходной сигнал IGM с монитора (130) оценки вариаций блокировался только на ограниченный период времени. Например, в одном из вариантов осуществления настоящего изобретения таймер (156) включается, когда монитор (154) контроля СПН принимает аварийный сигнал IGM. По истечении лимита времени, заданного таймером (156), срабатывает замыкатель (181), в результате чего разрешается передача аварийного сигнала IGM на наземную станцию. Если монитор (154) контроля СПН обнаруживает, что изменения в значениях СПН превышают заданный порог еще до истечения лимита времени, заданного таймером (156), то срабатывает замыкатель (181), инициируя дальнейшее прохождение аварийного сигнала IGM. Если выходной аварийный сигнал IMG, поступающий с модуля (130) оценки вариаций, блокируется, то происходит сброс в исходное состояние как таймера (156), так и монитора (154) контроля СПН, а замыкатель (181) или возвращается в нормально разомкнутое состояние, или остается в этом состоянии. Для минимизации ложных аварийных сигналов IMG таймер (156) может быть выставлен на любое значение в пределах от нескольких десятков секунд до нескольких сотен секунд. Например, в одном из вариантов осуществления настоящего изобретения таймер (156) сработает и инициирует срабатывание замыкателя (181) по истечении 400 секунд с момента инициирования аварийного сигнала IMG.
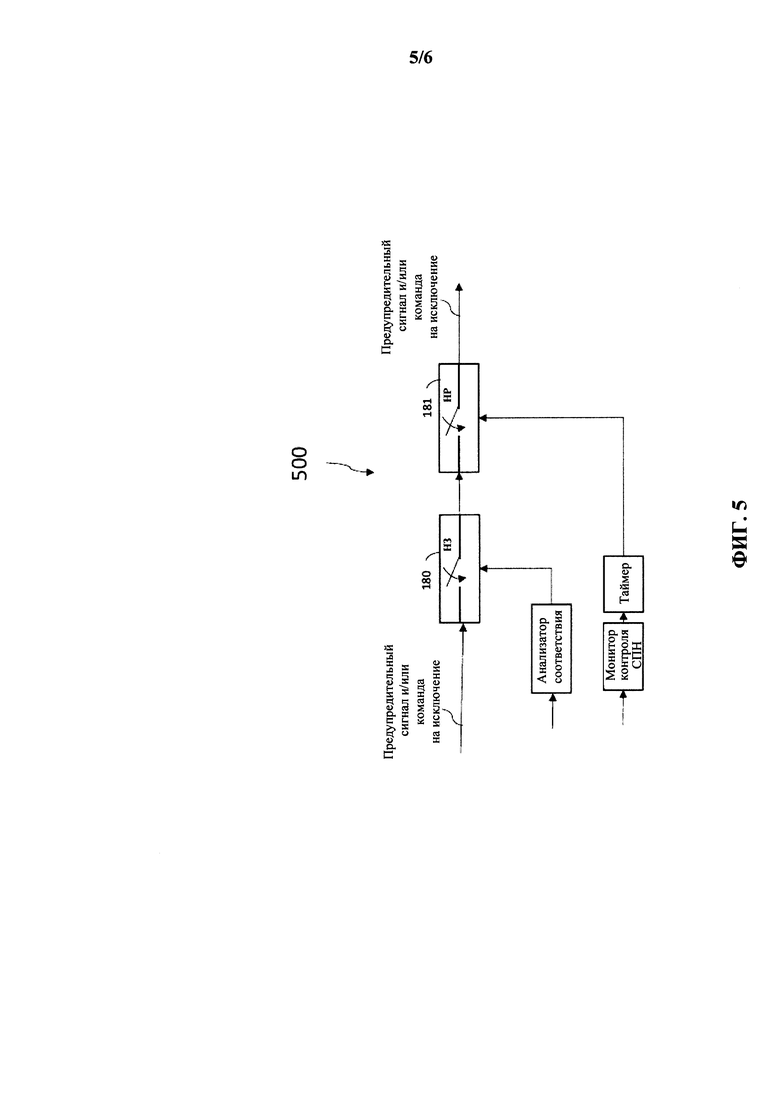
Как показано на фиг. 5, обе схемы минимизации ложных аварийных сигналов, т.е. схема, основанная на контроле соответствия, и схема, основанная на контроле СПН, могут быть объединены и интегрированы, что дает еще один вариант (500) осуществления настоящего изобретения. В этом примере реализации заявленного изобретения анализатор (170) соответствия и монитор (154) контроля СПН функционируют автономно, как это описано выше, а замыкатели (180) и (181) расположены таким образом, чтобы аварийный сигнал IMG мог проходить дальше только после получения разрешения на это от обоих замыкателей. Этого можно добиться за счет размещения замыкателей (180) и (181) по последовательной схеме (как это показано на фиг. 5) или за счет иной схемы размещения замыкателей или логических элементов, обеспечивающей выполнение эквивалентной функции.
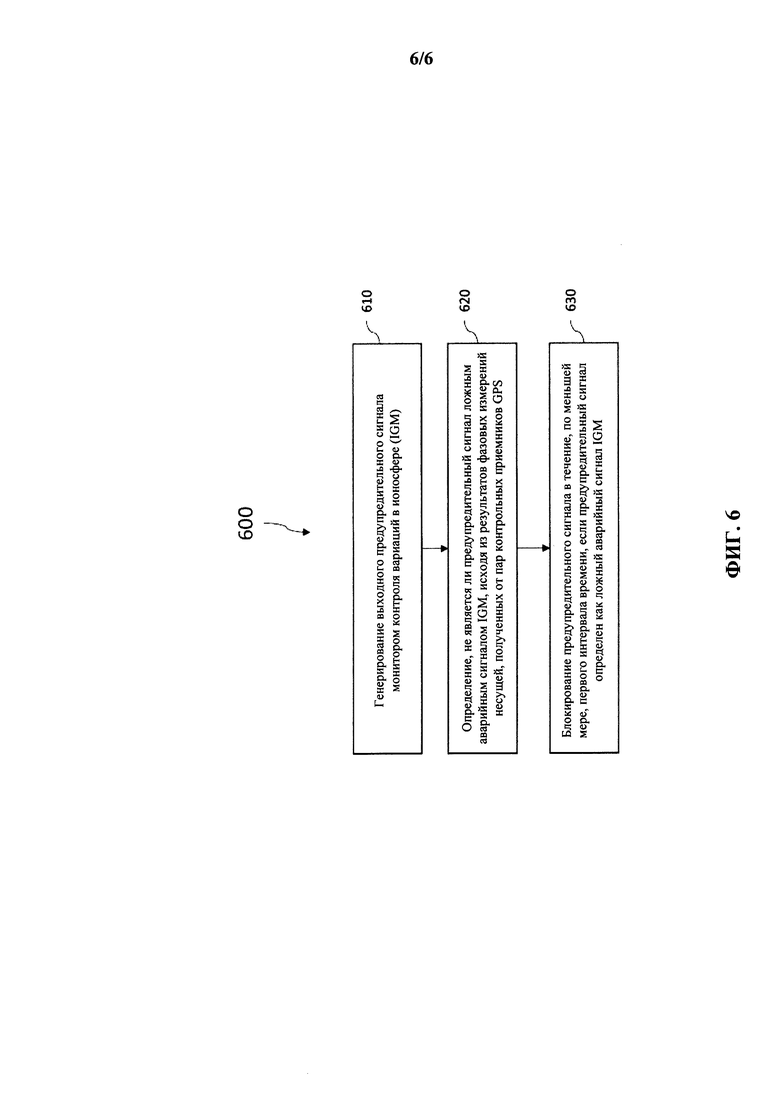
На фиг. 6 представлена блок-схема, иллюстрирующая способ (600) минимизации ложных аварийных сигналов о недопустимых вариациях в наземной станции GBAS согласно одному из вариантов осуществления настоящего изобретения. Следует понимать, что способ (600) может быть реализован, или с использованием схемы минимизации ложных аварийных сигналов на основе контроля соответствия или с использованием схемы минимизации ложных аварийных сигналов, основанной на контроле суммарной погрешности несущей (СПН), в привязке к любому из вариантов реализации заявленного изобретения, описанному выше, или же по комбинированной схеме, объединяющей обе указанные схемы. Способ (600) начинается со стадии (610), на которой происходит генерирование аварийного сигнала монитором контроля ионосферных вариаций. Далее указанный способ предусматривает переход к стадии (620), на которой определяется, является ли аварийный сигнал ложным, исходя из результатов фазовых измерений несущей, полученных с множества контрольных приемников глобальной навигационной спутниковой системы. Далее указанный способ предусматривает переход к стадии (630), на которой аварийный сигнал блокируется в течение по меньшей мере первого временного интервала исходя из результатов определения ложности сигнала на стадии (620).
В одном из вариантов осуществления настоящего изобретения, основанного на контроле соответствия, определение ложности аварийного сигнала на стадии (620) включает сравнение данных о двойных разностях фазы несущей, полученных с множества контрольных приемников навигационной спутниковой системы. Как было указано выше, несоответствия в данных о двойных разностях фазы несущей между двумя парами контрольных приемников дают значение соответствия, отличное от нуля. Если значение соответствия превышает заданный пороговый уровень, то аварийный сигнал может рассматриваться как ложный. В этом случае указанный способ предусматривает переход к стадии (630) блокировки аварийного сигнала, которая продолжается все время, пока значение соответствии превышает пороговый уровень. Для реализации способа (600) в варианте осуществления настоящего изобретения, проиллюстрированном на фиг. 2, данные о двойных разностях фазы несущей по каждой паре контрольных приемников навигационной спутниковой системы могут быть получены из выходных данных модуля (120) исчисления двойных разностей или - в альтернативном варианте - из памяти, если данные о двойных разностях фазы несущей хранятся, например, а запоминающем устройстве (150).
В одном из вариантов реализации заявленного изобретения, основанном на контроле СПН, определение аварийного сигнала как ложного на стадии (620) включает отслеживание изменения в значениях СПН с момента генерирования аварийного сигнала. Если изменение значений СПГ превышает пороговый уровень (например, изменение в 1,5 метра), то аварийный сигнал может считаться действительным, а не ложным. В этом случае указанный способ предусматривает переход к стадии (630), на которой происходит блокирование аварийного сигнала; при этом указанное блокирование продолжается все время, пока аварийный сигнал определяется как действительный на стадии (620). Кроме того, в одном из вариантов осуществления настоящего изобретения, когда определение ложности аварийного сигнала на стадии (620) не завершено в течение заданного периода ожидания, указанный способ предусматривает переход к стадии (630), на которой аварийный сигнал блокируется до истечения периода ожидания, после чего инициируется его прохождение дальше.
Примеры
Пример 1 включает систему минимизации ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций (IGM), которая содержит: по меньшей мере, три контрольных приемника глобальной навигационной спутниковой системы, которые выдают результаты фазовых измерений несущей; модуль обработки данных, связанный по меньшей мере с тремя контрольными приемниками глобальной навигационной спутниковой системы, который содержит модуль оценки вариаций, выдающий аварийные сигналы IGM с помощью замыкателя, срабатывающего при обнаружении чрезмерной вариации задержки по результатам фазовых измерений несущей; и анализатор соответствия, связанный с замыкателем; при этом анализатор соответствия выдает данные о двойных разностях фазы несущей, вычисленные по результатам фазовых измерений несущей, и определяет погрешность соответствия по данным о двойных разностях фазы несущей; при этом анализатор соответствия инициирует срабатывание замыкателя по блокированию аварийного сигнала IGM, если погрешность соответствия превышает заданный пороговый уровень.
Пример 2 включает систему по Примеру 1; при этом модуль обработки данных также включает: модуль исчисления разностей сигналов со спутников, который выдает результаты фазовых измерений несущей, и модуль исчисления двойных разностей, связанный с модулем исчисления разности сигналов со спутников, который вычисляет данные о двойных разностях фазы несущей.
Пример 3 включает систему по Примеру 2; при этом модуль обработки данных также включает запоминающее устройство; при этом в указанном запоминающем устройстве сохраняются данные о двойных разностях фазы несущей, которые извлекаются анализатором соответствия при выдаче аварийного сигнала IGM.
Пример 4 включает систему по любому из Примеров 1-3; при этом погрешность соответствия определена как функция разницы между первым значением двойной разности фазы несущей, вычисленным для первой пары контрольных приемников глобальной навигационной спутниковой системы, и вторым значением двойной разности фазы несущей, вычисленным для второй пары контрольных приемников глобальной навигационной спутниковой системы.
Пример 5 включает систему по любому из Примеров 1-4; при этом анализатор соответствия инициирует срабатывание замыкателя, который блокирует аварийный сигнал IGM, если погрешность соответствия превышает заданный пороговый уровень.
Пример 6 включает систему по любому из Примеров 1-5; при этом анализатор соответствия или замыкатель или как анализатор соответствия, так и замыкатель могут быть встроены в модуль обработки данных.
Пример 7 включает систему по любому из Примеров 1-6, которая также включает: монитор контроля суммарной погрешности несущей; при этом монитор контроля суммарной погрешности несущей выдает данные о суммарной погрешности несущей, вычисленные по результатам фазовых измерений несущей; при этом монитор контроля суммарной погрешности несущей инициирует срабатывание второго замыкателя, который разблокирует дальнейшее прохождение аварийного сигнала IGM, если изменение суммарной погрешности несущей, связанной по меньшей мере с одним из контрольных приемников глобальной навигационной спутниковой системы, превышает второй пороговый уровень.
Пример 8 включает систему минимизации ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций (IGM), которая содержит: множество контрольных приемников глобальной навигационной спутниковой системы, которые выдают результаты фазовых измерений несущей; модуль обработки данных, связанный с множеством контрольных приемников глобальной навигационной спутниковой системы, который включает модуль оценки вариаций, выдающий аварийный сигнал IGM через нормально разомкнутый замыкатель при обнаружении чрезмерной вариации задержки по результатам фазовых измерений несущей; монитор контроля суммарной погрешности несущей (СПН), соединенный с замыкателем; при этом монитор контроля СПН выдает данные о суммарной погрешности несущей, вычисленные по результатам фазовых измерений несущей; при этом монитор контроля СПН инициирует срабатывание замыкателя, который разблокирует дальнейшее прохождение сигнала IGM, если изменение суммарной погрешности несущей, связанной по меньшей мере с одним из контрольных приемников глобальной навигационной спутниковой системы, превышает заданный пороговый уровень.
Пример 9 включает систему по Примеру 8; при этом модуль обработки данных также включает: модуль исчисления разностей сигналов со спутников, который выдает результаты фазовых измерений несущей; модуль исчисления двойных разностей, связанный с модулем исчисления разностей сигналов со спутников; при этом модуль исчисления двойных разностей генерирует выходные данные о двойных разностях фазы несущей, передаваемые в модуль оценки вариаций.
Пример 10 включает систему по п. 8 или п. 9 формулы изобретения; при этом модуль обработки данных также включает: сумматор погрешностей несущей, который выдает результаты фазовых измерений несущей для вычисления значений суммарной погрешности несущей по каждому из контрольных приемников глобальной навигационной спутниковой системы и сохраняет значения суммарных погрешностей несущей в запоминающем устройстве; при этом монитор контроля суммарной погрешности несущей выдает значения суммарной погрешности несущей из запоминающего устройства.
Пример 11 включает систему по Примеру 10; при этом значения суммарных погрешностей несущей хранятся в запоминающем устройстве и извлекаются монитором контроля суммарной погрешности несущей при генерировании аварийного сигнала IMG.
Пример 12 включает систему по любому из Примеров 8-11; при этом в модуль обработки данных встроен монитор контроля суммарной погрешности несущей или замыкатель, или оба эти указанные устройства.
Пример 13 включает систему по любому из Примеров 8-12; при этом монитор контроля суммарной погрешности несущей инициирует срабатывание замыкателя, если изменение суммарной погрешности несущей превышает пороговый уровень в течение заданного промежутка времени.
Пример 14 включает систему по любому из Примеров 8-13; при этом изменение суммарной погрешности несущей исчисляется как функция изменения суммарной погрешности несущей по меньшей мере для двух контрольных приемников глобальной навигационной спутниковой системы.
Пример 15 включает систему по любому из Примеров 8-14, которая также включает таймер, соединенный с замыкателем; при этом таймер выполнен с возможностью включения периода ожидания сразу после генерирования аварийного сигнала модулем оценки вариаций; при этом замыкатель срабатывает по истечении периода ожидания, обеспечивая прохождение аварийного сигнала IMG дальше.
Пример 16 включает систему по Примеру 15; при этом период ожидания составляет от одной секунды до 1000 секунд.
Пример 17 включает систему по Примеру 15, или по Примеру 16; при этом таймер является неотъемлемой частью монитора контроля суммарной погрешности несущей.
Пример 18 включает способ минимизации ложных аварийных сигналов о недопустимых вариациях задержки в наземной станции спутниковой системы дифференциальной коррекции (GBAS), содержащей множество контрольных приемников навигационной спутниковой системы; при этом указанный способ включает: генерирование аварийного сигнала с помощью монитора контроля ионосферных вариаций (IGM), предусмотренного в наземной станции GBAS; определение ложности аварийного сигнала по результатам фазовых измерений несущей, полученных с множества контрольных приемников глобальной навигационной спутниковой системы; и блокирование аварийного сигнала в течение по меньшей мере первого временного интервала исходя из результатов такого определения.
Пример 19 включает способ по Примеру 18; при этом множество контрольных приемников глобальной навигационной спутниковой системы состоит по меньшей мере из трех контрольных приемников; при этом указанный способ также включает: сравнение данных о двойных разностях фазы несущей, полученных по результатам фазовых измерений несущей, для вычисления значения погрешности соответствия; и блокирование аварийного сигнала в течение по меньшей мере первого временного интервала, если величина соответствия превышает заданный пороговый уровень; при этом блокирование аварийного сигнала будет продолжаться все время, пока значение погрешности соответствия будет превышать заданный пороговый уровень.
Пример 20 включает способ по Примеру 18 или по Примеру 19, который также включает: отслеживание изменения значений суммарной погрешности несущей, начиная с момента генерирования аварийного сигнала; если изменение в значениях суммарной погрешности несущей превышает пороговый уровень, то блокирование аварийного сигнала в течение по меньшей мере первого промежутка времени предусматривает в дальнейшем прохождение аварийного сигнала, или когда изменение значения суммарной погрешности несущей превысит пороговый уровень, или когда истечет заданный период ожидания, в зависимости от того, что произойдет раньше.
Хотя в настоящем документе проиллюстрированы и описаны конкретные варианты осуществления заявленного изобретения, специалистам в данной области техники понятно, что проиллюстрированные конкретные варианты осуществления заявленного изобретения могут быть заменены любой иной схемой, рассчитанной для достижения аналогичной цели. Настоящее изобретение, как предполагается, охватывает любые модификации или вариации заявленного изобретения. В силу вышесказанного очевидно, что настоящее изобретение ограничивается только пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНАЯ СИСТЕМА И СПОСОБ РАСШИРЕНИЯ ВОЗМОЖНОСТЕЙ ОБНАРУЖЕНИЯ ЧРЕЗМЕРНЫХ ВАРИАЦИЙ ЗАДЕРЖКИ СИГНАЛОВ С ПОМОЩЬЮ КОРРЕКЦИИ ПО ЧЕТНОСТИ | 2015 |
|
RU2684899C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИОНОСФЕРНОГО ШТОРМА С ПОМОЩЬЮ НАЗЕМНОЙ СТАЦИОНАРНОЙ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2017 |
|
RU2653066C1 |
| ДВУХЧАСТОТНЫЙ ФАЗОВЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2019 |
|
RU2717098C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМУЩЕНИЙ ИОНОСФЕРЫ, ВЫЗВАННЫХ ЗАПУСКАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2624911C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
Изобретение относится к технике связи и предназначено для отслеживания ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций. Технический результат состоит в повышении помехоустойчивости приема сигналов. Для этого способ минимизации ложных сигналов о недопустимых вариациях включает следующие стадии: генерирование аварийного сигнала монитором контроля ионосферных вариаций (IGM), установленным на наземной станции GBAS; выяснение, не является ли аварийный сигнал ложным, исходя из данных, выведенных по результатам фазовых измерений несущей частоты, которые получены с множества контрольных приемников навигационной спутниковой системы; и блокирование аварийного сигнала в течение по меньшей мере первого временного интервала исходя из результатов выяснения. 3 н. и 17 з.п. ф-лы, 6 ил.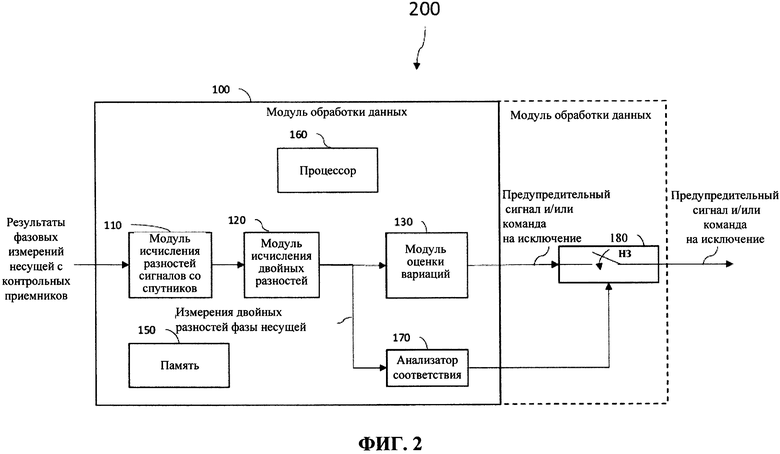
1. Система минимизации ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций (IGM), включающая:
по меньшей мере три контрольных приемника глобальной навигационной спутниковой системы, которые выдают результаты фазовых измерений несущей;
модуль обработки данных, связанный по меньшей мере с тремя контрольными приемниками глобальной навигационной спутниковой системы, который содержит модуль оценки вариаций, выдающий аварийные сигналы IGM с помощью замыкателя, срабатывающего при обнаружении чрезмерной вариации задержки по результатам фазовых измерений несущей; и
анализатор соответствия, связанный с замыкателем; при этом анализатор соответствия выдает данные о двойных разностях фазы несущей, вычисленные по результатам фазовых измерений несущей, и определяет погрешность соответствия по данным о двойных разностях фазы несущей; при этом анализатор соответствия инициирует срабатывание замыкателя по блокированию аварийного сигнала IGM, если погрешность соответствия превышает заданный пороговый уровень.
2. Система по п. 1, отличающаяся тем, что модуль обработки данных также включает:
модуль исчисления разностей сигналов со спутников, который выдает результаты фазовых измерений несущей; и
модуль исчисления двойных разностей, связанный с модулем исчисления разности сигналов со спутников, который вычисляет данные о двойных разностях фазы несущей.
3. Система по п. 2, отличающаяся тем, что модуль обработки данных также включает запоминающее устройство; при этом в указанном запоминающем устройстве сохраняются данные о двойных разностях фазы несущей, которые извлекаются анализатором соответствия при выдаче аварийного сигнала IGM.
4. Система по п. 1, отличающаяся тем, что погрешность соответствия определена как функция разницы между первым значением двойной разности фазы несущей, вычисленным для первой пары контрольных приемников глобальной навигационной спутниковой системы, и вторым значением двойной разности фазы несущей, вычисленным для второй пары контрольных приемников глобальной навигационной спутниковой системы.
5. Система по п. 4, отличающаяся тем, что анализатор соответствия инициирует срабатывание замыкателя, который блокирует аварийный сигнал IGM, если погрешность соответствия превышает заданный пороговый уровень.
6. Система по п. 1, отличающаяся тем, что анализатор соответствия или замыкатель или как анализатор соответствия, так и замыкатель могут быть встроены в модуль обработки данных.
7. Система по п. 1, отличающаяся тем, что она также включает монитор контроля суммарной погрешности несущей; при этом монитор контроля суммарной погрешности несущей выдает данные о суммарной погрешности несущей, вычисленные по результатам фазовых измерений несущей; при этом монитор контроля суммарной погрешности несущей инициирует срабатывание второго замыкателя, который разблокирует дальнейшее прохождение аварийного сигнала IGM, если изменение суммарной погрешности несущей, связанной по меньшей мере с одним из контрольных приемников глобальной навигационной спутниковой системы, превышает второй пороговый уровень.
8. Система минимизации ложных аварийных сигналов, поступающих с мониторов контроля ионосферных вариаций (IGM), включающая:
множество контрольных приемников глобальной навигационной спутниковой системы, которые выдают результаты фазовых измерений несущей;
модуль обработки данных, связанный с множеством контрольных приемников глобальной навигационной спутниковой системы, который включает модуль оценки вариаций, выдающий аварийный сигнал IGM через нормально разомкнутый замыкатель при обнаружении чрезмерной вариации задержки по результатам фазовых измерений несущей; и
монитор контроля суммарной погрешности несущей (СПН), соединенный с замыкателем; при этом монитор контроля СПН выдает данные о суммарной погрешности несущей, вычисленные по результатам фазовых измерений несущей; при этом монитор контроля СПН инициирует срабатывание замыкателя, который разблокирует дальнейшее прохождение сигнала IGM, если изменение суммарной погрешности несущей, связанной по меньшей мере с одним из контрольных приемников глобальной навигационной спутниковой системы, превышает заданный пороговый уровень.
9. Система по п. 8, отличающаяся тем, что модуль обработки данных также включает:
модуль исчисления разностей сигналов со спутников, который выдает результаты фазовых измерений несущей; и
модуль исчисления двойных разностей, связанный с модулем исчисления разностей сигналов со спутников; при этом модуль исчисления двойных разностей генерирует выходные данные о двойных разностях фазы несущей, передаваемые в модуль оценки вариаций.
10. Система по п. 8, отличающаяся тем, что модуль обработки данных также включает:
сумматор погрешностей несущей, который выдает результаты фазовых измерений несущей для вычисления значений суммарной погрешности несущей по каждому из контрольных приемников глобальной навигационной спутниковой системы и сохраняет значения суммарных погрешностей несущей в запоминающем устройстве;
при этом монитор контроля суммарной погрешности несущей выдает значения суммарной погрешности несущей из запоминающего устройства.
11. Система по п. 10, отличающаяся тем, что значения суммарных погрешностей несущей хранятся в запоминающем устройстве и извлекаются монитором контроля суммарной погрешности несущей при генерировании аварийного сигнала IGM.
12. Система по п. 8, отличающаяся тем, что в модуль обработки данных встроен монитор контроля суммарной погрешности несущей или замыкатель или оба эти указанные устройства.
13. Система по п. 8, отличающаяся тем, что монитор контроля суммарной погрешности несущей инициирует срабатывание замыкателя, если изменение суммарной погрешности несущей превышает пороговый уровень в течение заданного промежутка времени.
14. Система по п. 8, отличающаяся тем, что изменение суммарной погрешности несущей исчисляется как функция изменения суммарной погрешности несущей по меньшей мере для двух контрольных приемников глобальной навигационной спутниковой системы.
15. Система по п. 8, отличающаяся тем, что она также включает:
таймер, соединенный с замыкателем; при этом таймер выполнен с возможностью включения периода ожидания сразу после генерирования аварийного сигнала модулем оценки вариаций;
при этом замыкатель срабатывает по истечении периода ожидания, обеспечивая прохождение аварийного сигнала IGM дальше.
16. Система по п. 15, отличающаяся тем, что период ожидания составляет от одной секунды до 1000 секунд.
17. Система по п. 15, отличающаяся тем, что таймер является неотъемлемой частью монитора контроля суммарной погрешности несущей.
18. Способ минимизации ложных аварийных сигналов о недопустимых вариациях задержки в наземной станции спутниковой системы дифференциальной коррекции (GBAS), содержащей множество контрольных приемников навигационной спутниковой системы, отличающийся тем, что он включает:
генерирование аварийного сигнала с помощью монитора контроля ионосферных вариаций (IGM), предусмотренного в наземной станции GBAS;
определение ложности аварийного сигнала по результатам фазовых измерений несущей, полученных с множества контрольных приемников глобальной навигационной спутниковой системы; и
блокирование аварийного сигнала в течение по меньшей мере первого временного интервала исходя из результатов такого определения.
19. Способ по п. 18, отличающийся тем, что множество контрольных приемников глобальной навигационной спутниковой системы состоит по меньшей мере из трех контрольных приемников; при этом указанный способ также включает:
сравнение данных о двойных разностях фазы несущей, полученных по результатам фазовых измерений несущей, для вычисления значения погрешности соответствия; и
блокирование аварийного сигнала в течение по меньшей мере первого временного интервала, если величина соответствия превышает заданный пороговый уровень; при этом блокирование аварийного сигнала будет продолжаться все время, пока значение погрешности соответствия будет превышать заданный пороговый уровень.
20. Способ по п. 18, отличающийся тем, что он также включает:
отслеживание изменения значений суммарной погрешности несущей начиная с момента генерирования аварийного сигнала;
если изменение в значениях суммарной погрешности несущей превышает пороговый уровень, то блокирование аварийного сигнала в течение по меньшей мере первого промежутка времени предусматривает в дальнейшем прохождение аварийного сигнала, или когда изменение значения суммарной погрешности несущей превысит пороговый уровень, или когда истечет заданный период ожидания, в зависимости от того, что произойдет раньше.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

