Лицензионные права правительства
Настоящее изобретение было создано при государственной поддержке согласно договору с правительством №DTFACT-10-C-00013, заключенному научно-исследовательским центром FAA WM J Hughes Technical Center. Правительство США обладает определенными правами на данное изобретение.
Уровень техники
Плотность электронов в ионосфере варьируется в зависимости от географического местоположения и времени суток. Международная организация гражданской авиации (ICAO) разрабатывает стандарты устранения угроз в отношении систем навигации и управления самолетами, которые несут в себе ионосферные аномалии, т.е. резкие изменения плотности электронов в ионосфере. Разработка стандартов показала исключительную важность того, чтобы данные, полученные наземными контрольно-проверочными системами в отношении вариаций задержки сигналов, обусловленных ионосферными аномалиями, были абсолютными, а не относительными в сравнении с результатами предыдущих спутниковых измерений. Важно выявлять чрезмерные вариации по результатам первой же серии измерений, полученным со спутника после его попадания в поле зрения наземной системы дифференциальной коррекции GPS.
В наземной станции результаты измерений фазы несущей, полеченные с пар контрольных приемников, которые расходятся друг с другом из-за неоднозначности длины волны несущей, могут привести к пропускам данных или некорректному повторному принятию данных со спутников. Например, если результат измерения фазы несущей по одной паре контрольных приемников составляет около ±λ/2, то помехи на этой паре контрольных приемников при измерении фазы несущей могут дать результат -λ2, тогда как комбинация других пар контрольных приемников, превышающих исходный уровень первой пары контрольных приемников, может дать результат +λ/2. В этом случае результаты измерений фазы несущей будут взаимно исключать друг друга в существующих устройствах отслеживания вариаций задержки.
Сущность изобретения
Настоящее изобретение относится к функциональной схеме обработки данных для отслеживания горизонтальной вариации задержки сигналов со спутников. Функциональная схема обработки данных включает в себя модуль дифференцирования спутниковых сигналов, модуль вычисления двойных разностей, модуль контроля по четности и модуль оценки вариаций. Модуль дифференцирования спутниковых сигналов выполнен с возможностью приема результатов измерения фазы несущей, по меньшей мере, по двум спутникам, по меньшей мере, с трех контрольных приемников; при этом, по меньшей мере, два спутника включают в себя один отслеживаемый спутник и, по меньшей мере, один иной спутник. По меньшей мере, три контрольных приемника характеризуются известным взаимным геометрическим расположением. Модуль дифференцирования спутниковых сигналов определяет разности в результатах измерения фазы несущей между сигналами, полученными с отслеживаемого спутника и, по меньшей мере, с одного спутника из числа иных спутников в количестве, по меньшей мере, одного. Модуль вычисления двойных разностей выполнен с возможностью формирования двойных разностей между одной или несколькими парами контрольных приемников из числа, по меньшей мере, трех контрольных приемников на основе разностей в результатах измерений фазы несущей; коррекции двойных разностей между парами контрольных приемников по известной разнице в положении контрольных приемников в парах; выполнения операции по модулю для ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны; и усреднения - для отслеживаемого спутника - двойных разностей по прочим спутникам из числа, по меньшей мере, двух спутников. Модуль контроля по четности выполнен с возможностью ввода усредненных скорректированных двойных разностей, если среднее значение скорректированных двойных разностей по иным спутникам из числа, по меньшей мере, двух спутников превышает заданное пороговое значение, разрешающее контроль по четности. Модуль оценки вариаций выполнен с возможностью оценивания величины горизонтальной вариации задержки, исходя из набора усредненных скорректированных двойных разностей, полученных в качестве вводных данных из модуля контроля по четности.
Краткое описание чертежей
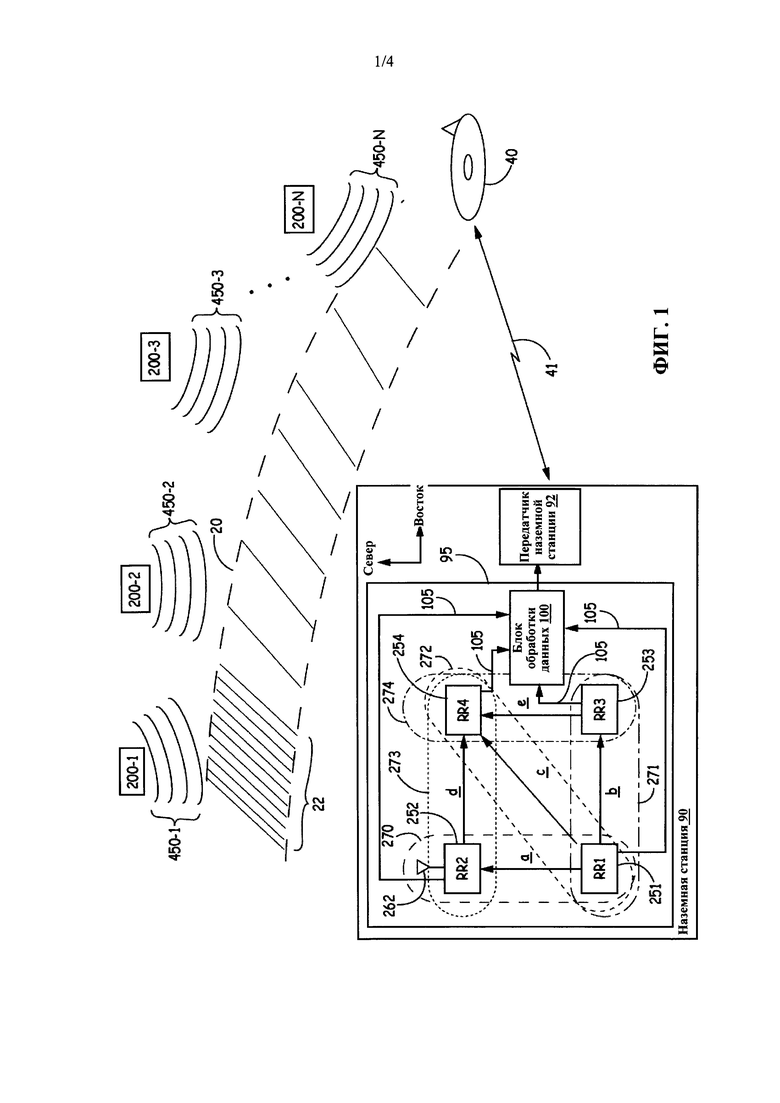
На фиг. 1 проиллюстрирован вариант реализации наземной станции для отслеживания чрезмерных вариаций задержки сигналов со спутников согласно настоящему изобретению.
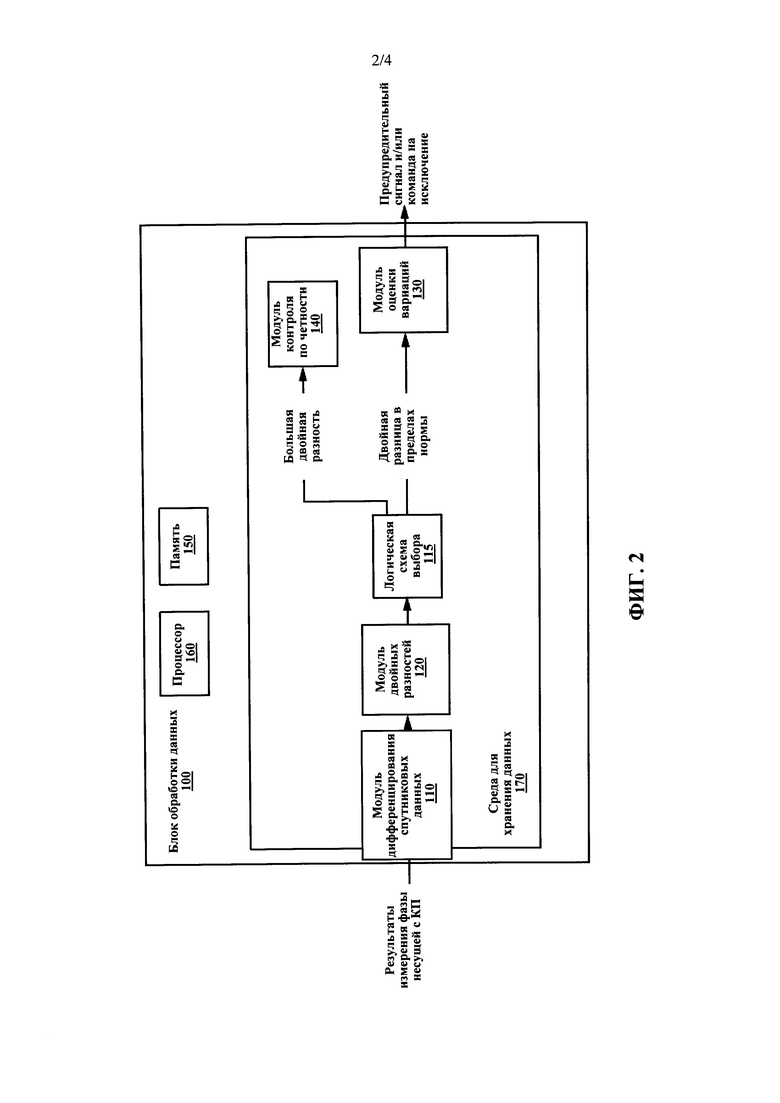
На фиг. 2 проиллюстрирован вариант реализации функциональной схемы согласно настоящему изобретению.
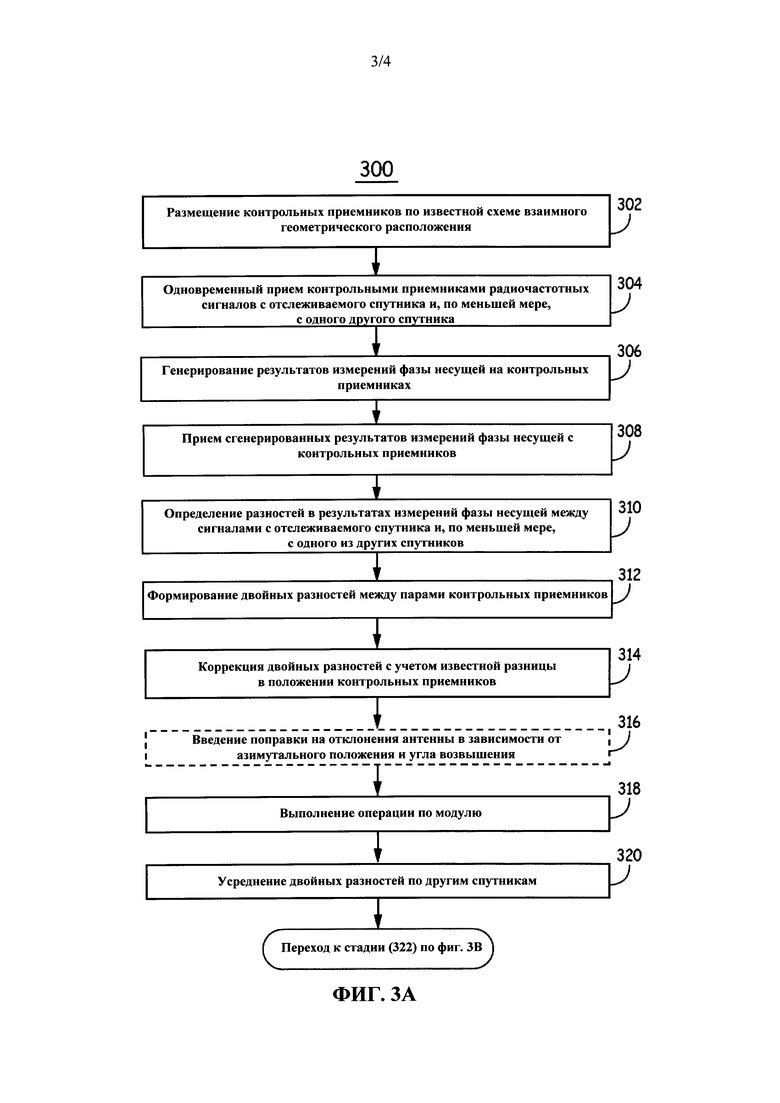
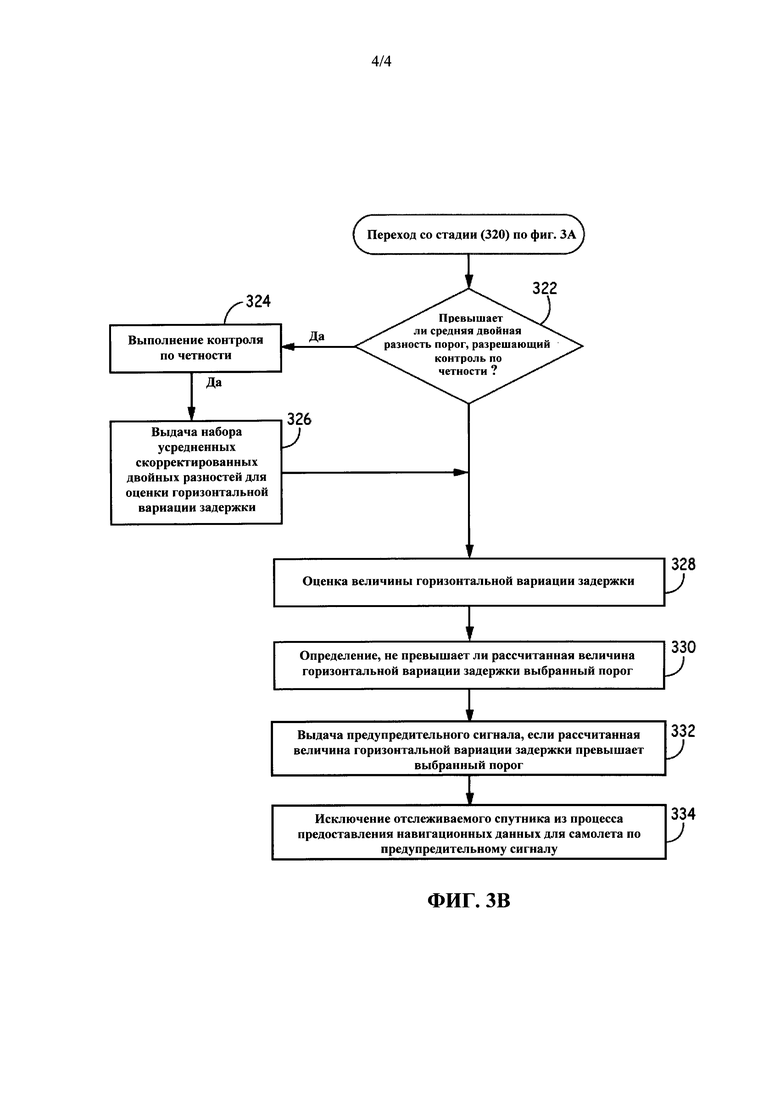
На фиг. 3А и 3В представлены блок-схемы, иллюстрирующие один из вариантов реализации способа отслеживания чрезмерных вариаций задержки согласно настоящему изобретению.
В соответствии с общепринятой практикой различные признаки, описанные в настоящем документе, не вычерчены в масштабе, а представлены таким образом, чтобы выделить признаки, относящиеся к заявленному изобретению. По всему тексту и на всех чертежах одни и те же элементы обозначены одинаковыми номерами позиций.
Подробное описание изобретения
Блок отслеживания чрезмерных вариаций задержки является одним из основных приборов наземной станции. Блок отслеживания чрезмерных вариаций задержки требует поддержания точности несущей на миллиметровом уровне. Блок отслеживания горизонтальной вариации задержки, описанный в настоящем документе, выполнен таким образом, что контрольные приемники, включающие в себя, по меньшей мере, две пары контрольных приемников, не ухудшают рабочие характеристики блока отслеживания горизонтальной вариации задержки. Блок отслеживания горизонтальной вариации задержки выявляет горизонтальную составляющую вариации задержки, влияющую на сигналы, которые принимаются наземной станцией, что обеспечивается за счет использования результатов измерений фазы несущей, по меньшей мере, с двух пар контрольных приемников; а также определяет, является ли вариация задержки чрезмерной. Вариация задержки сигнала, переданного с отслеживаемого спутника, считается чрезмерной, если она превышает заданное пороговое значение.
Описанные в настоящей заявке системы и способы выполнены с возможностью разрешения проблемы пропуска данных или некорректного повторного принятия данных со спутников парами контрольных приемников, обеспечивающих измерения в пределах ±λ/2. В частности, методы проверки четности используются для обнаружения и коррекции несогласованных результатов измерений фазы несущей. Наименьшая четность выбирается по всем перестановкам результатов измерений (комбинациям изменений знаков +/- в результатах измерений фазы несущей). Контроль по четности активируется при превышении заданной пороговой величины, разрешающей проведение контроля по четности, как это описано ниже. Если указанное пороговое значение не превышено, то используются результаты измерений фазы несущей по умолчанию без проведения контроля по четности во избежание изменения номинальных шумовых характеристик в нормальном режиме работы. В одном из вариантов осуществления настоящего изобретения пороговое значение, разрешающее контроль по четности, равно ±λ/4, где символом λ обозначена длина волны несущей со спутника. Пороговое значение, разрешающее контроль по четности, также именуется в настоящем документе «пороговой величиной двойной разности».
Четыре (или больше) контрольных приемника также предоставляют избыточные данные, которые повышают чувствительность к горизонтальным вариациям задержки. Термины «аномальная вариация задержки», «вариация задержки», «вариация задержки в ионосфере» и «горизонтальная вариация задержки», используемые в настоящем документе, являются взаимозаменяемыми.
На фиг. 1 проиллюстрирован вариант реализации наземной станции (90) для отслеживания чрезмерных вариаций задержки сигналов со спутников согласно настоящему изобретению. Как показано на фиг. 1, наземная станция (90) включает в себя блок (95) отслеживания горизонтальной вариации задержки и передатчик (92) наземной станции. Передатчик (92) наземной станции представляет собой элемент наземной станции (90), который по каналу (41) связи передает сигналы на самолет (40), находящийся вблизи наземной станции (90). Блок (95) отслеживания горизонтальной вариации задержки отслеживает чрезмерные вариации задержки в горизонтальной плоскости в отношении сигналов (450-1), передаваемых с отслеживаемого спутника (200-1).
Блок (95) отслеживания горизонтальной вариации задержки включает в себя, по меньшей мере, три контрольных приемника и функциональную схему (100) обработки данных. По меньшей мере, три контрольных приемника (251)-(254) характеризуются известным взаимным геометрическим расположением. Функциональная схема (100) обработки данных содержит множество функциональных блоков, управляемых процессором, и в настоящем документе она также именуется «модулем (100) обработки данных» или «функциональным модулем (100) обработки данных». Пример реализации наземной станции (90), проиллюстрированный на фиг. 1, содержит четыре контрольных приемника (251)-(254), расположенных квадратом относительно друг друга.
Известное взаимное геометрическое расположение, по меньшей мере, трех контрольных приемников обозначено: вектором  , направленным от первого контрольного приемника (251) ко второму контрольному приемнику (252); вектором
, направленным от первого контрольного приемника (251) ко второму контрольному приемнику (252); вектором  , направленным от первого контрольного приемника (251) к третьему контрольному приемнику (253); вектором
, направленным от первого контрольного приемника (251) к третьему контрольному приемнику (253); вектором  , направленным от первого контрольного приемника (251) к четвертому контрольному приемнику (254); вектором
, направленным от первого контрольного приемника (251) к четвертому контрольному приемнику (254); вектором  , направленным от второго контрольного приемника (252) к четвертому контрольному приемнику (254); и вектором
, направленным от второго контрольного приемника (252) к четвертому контрольному приемнику (254); и вектором  , направленным от третьего контрольного приемника (253) к четвертому контрольному приемнику (254).
, направленным от третьего контрольного приемника (253) к четвертому контрольному приемнику (254).
Вектор определяет известную разницу в положении контрольных приемников (251) и (252), которые образуют пару (270) контрольных приемников (также именуемую в настоящем документе «парой (270)»). Вектор определяет известную разницу в положении контрольных приемников (251) и (253), которые образуют пару (271) контрольных приемников (также именуемую в настоящем документе «парой (271)»). Вектор определяет известную разницу в положении контрольных приемников (251) и (254), которые образуют пару (272) контрольных приемников (также именуемую в настоящем документе «парой (272)»). Вектор определяет известную разницу в положении контрольных приемников (252) и (254), которые образуют пару (273) контрольных приемников (также именуемую в настоящем документе «парой (273)»). Вектор определяет известную разницу в положении контрольных приемников (253) и (254), которые образуют пару (274) контрольных приемников (также именуемую в настоящем документе «парой (274)»).
Контрольные приемники в парах (270)-(273) характеризуются известной разницей в положении по отношению к контрольному приемнику (251), общей для всех пар (270)-(273). Дополнительная пара контрольных приемников между вторым контрольным приемником (252) и третьим контрольным приемником (253) не показана, но схема обработки данных в состоянии использовать данные с этой пары контрольных приемников, которая включает в себя второй контрольный приемник (252) и третий контрольный приемник (253), для проведения измерений по шести парам, как это описано ниже.
Горизонтальная вариация задержки характеризуется горизонтальной компонентой, которая лежит в плоскости, захватывающей все четыре контрольных приемника (251)-(254). Функциональная схема (100) обработки данных коммуникативно связан с каждым контрольным приемником (251)-(254). Во время работы блок (95) отслеживания горизонтальной вариации задержки принимает сигналы, по меньшей мере, с двух спутников (200) (1-N). Контрольные приемники (251)-(254) представляют собой наземные контрольные приемники, которые также обозначаются в настоящем документе аббревиатурой «КП».
Радиочастотные сигналы (450) (1-N), проиллюстрированные в виде фазовых фронтов, излучаются, соответственно, спутниками (200) (1-N), где N - это целое положительное число. Радиочастотные сигналы (451) (1-N) проходят через ионосферу, обозначенную позицией (20), и поступают в наземную станцию (90). Четыре контрольных приемника (251)-(254) принимают радиочастотные сигналы с отслеживаемого спутника (200-1) и с прочих спутников (200) (2-N). Понятно, что каждый контрольный приемник (251)-(254) является приемником радиочастот, снабженным антенной, такой как антенна (262) на контрольном приемнике (252). Для наглядности показана только одна антенна (262) (на контрольном приемнике (252)).
В ионосфере (20) могут иметь место аномальные вариации (22) задержки, которые негативно влияют на фазу радиочастотных сигналов, проходящих через зону аномальной вариации (22) задержки. На аномальную вариацию (22) задержки указывает повышенная плотность поперечной штриховки в ионосфере (20). Например, как это показано на фиг. 1, радиочастотный сигнал (450-1) с отслеживаемого спутника (200-1) на своем пути к четырем контрольным приемникам (251)-(254) проходит через зону аномальной вариации (22) задержки. Вариация (22) задержки преобразуется в горизонтальную вариацию при приеме сигнала на поверхности земли. Это означает, что ионосферная задержка принятого сигнала изменяется при перемещении приемника на поверхности земли.
Радиочастотные сигналы (450) (1-N), передаваемые с соответствующих спутников (200) (1-N), дискретизируются в контрольных приемниках (251)-(254) приблизительно в одно и то же время. В регистрирующем устройстве (не показано) контрольных приемников (251)-(254) сохраняется число, указывающее на мгновенное значение угла сдвига фазы несущей радиочастотного сигнала (450-n), принятого с n-ого спутника, где n - это целое положительное число. Регистрирующее устройство непрерывно обновляет свои данные по радиочастотным сигналам, принимаемым с n-ого спутника (200-n) каждым контрольным приемником (251)-(254). Радиочастотный сигнал n-ого спутника (450-n) поступает с одного из, по меньшей мере, двух спутников. Мгновенное считывание данных регистрирующим устройством называется в настоящем документе «измерением фазы несущей» или «мгновенным измерением фазы несущей». Устройства отслеживания несущей (не показаны) контрольных приемников (251)-(254) оценивают результирующую фазу и ошибки допплеровского сдвига, и обновляют данные в регистрирующем устройстве по каждому спутнику (200) (1-N), находящемуся в поле зрения контрольных приемников (251)-(254). Понижающее преобразование по каждому контрольному приемнику является общим для всех спутников 200 (1-N), вследствие чего мгновенная фаза несущей, указанная регистрирующим устройством, может быть использована для определения относительной фазы между принятыми спутниковыми сигналами в диапазоне от 0° до 360°. Относительная фаза представляет собой фазовое соотношение между сигналами, переданными, по меньшей мере, с двух спутников и одновременно принятых контрольными приемниками (251)-(254). Относительная фаза, таким образом, представляет собой разницу в результатах измерений фазы несущей между сигналами, переданными, по меньшей мере, с двух спутников, которые были одновременно получены контрольными приемниками (251)-(254).
Отслеживаемым спутником называется тот спутник, по которому отслеживается величина горизонтальной вариации задержки сигнала в ионосфере относительно некой заданной пороговой величины такой вариации. В настоящем документе отслеживаемым спутником называется первый спутник (200-1), однако следует понимать, что наземная станция (90) может отслеживать вариации задержки в ионосфере по двум и более спутникам (200) (1-N). Таким образом, программные модули, содержащиеся в функциональной схеме (100) обработки данных, выполнены с возможностью отслеживания одного или нескольких спутников (200) (1-N) таким образом, чтобы один или несколько спутников (200) (1-N) являлись отслеживаемыми спутниками. В вариантах осуществления настоящего изобретения все спутники (200) (1-N) являются отслеживаемыми.
В вариантах реализации заявленного изобретения, описанных ниже, длина векторов  выбирается таким образом, чтобы избежать неопределенностей фазы несущей, которые обусловлены циклическим повторением одного и того же фазового соотношения. Допустимое взаимное геометрическое расположение контрольных приемников соотносится с длиной волны принимаемых сигналов, диапазоном допустимых вариаций задержки и расчетным уровнем шумов в измерениях фазы несущей. К примеру, предположим, что длина волны λ радиочастотного сигнала, передаваемого спутниками (200) (1-N) составляет 19 см. Вариации задержки, которые необходимо выявить, лежат в диапазоне от -400 мм/км до +400 мм/км (т.е. весь диапазон составляет 800 мм/км). Длина векторов
выбирается таким образом, чтобы избежать неопределенностей фазы несущей, которые обусловлены циклическим повторением одного и того же фазового соотношения. Допустимое взаимное геометрическое расположение контрольных приемников соотносится с длиной волны принимаемых сигналов, диапазоном допустимых вариаций задержки и расчетным уровнем шумов в измерениях фазы несущей. К примеру, предположим, что длина волны λ радиочастотного сигнала, передаваемого спутниками (200) (1-N) составляет 19 см. Вариации задержки, которые необходимо выявить, лежат в диапазоне от -400 мм/км до +400 мм/км (т.е. весь диапазон составляет 800 мм/км). Длина векторов  ,
,  ,
,  ,
,  и
и  составляет 50-200 м. В этом примере максимальная погрешность в фазе несущей составит δхс = 800 мм/км × 0,2 км = 16 см, что меньше длины волны в 19 см. Но если окажется, что фазовый шум несущей превышает этот расчетный предел, или он больше предполагаемых вариаций, то неопределенности фазы несущей могут привести к пропускам данных или некорректному повторному принятию данных со спутников.
составляет 50-200 м. В этом примере максимальная погрешность в фазе несущей составит δхс = 800 мм/км × 0,2 км = 16 см, что меньше длины волны в 19 см. Но если окажется, что фазовый шум несущей превышает этот расчетный предел, или он больше предполагаемых вариаций, то неопределенности фазы несущей могут привести к пропускам данных или некорректному повторному принятию данных со спутников.
В одном из вариантов осуществления настоящего изобретения наземная станция (90) является наземной станцией системы GBAS (наземной системы дифференциальной коррекции). Хотя наземная станция (90), описанная в настоящем документе, предназначена для системы посадки самолетов, заявленное изобретение может быть реализовано в системах, которые требуют точных входных данных со спутника системы GPS, и которые не ограничены использованием в самолетах и/или в наземных станциях для управления движением самолетов.
На фиг. 2 проиллюстрирован вариант реализации функциональной схемы (100) обработки данных согласно настоящему изобретению. Функциональная схема (100) обработки данных включает в себя модуль (110) дифференцирования спутниковых сигналов, модуль (120) вычисления двойных разностей, логическую схему (115) выбора, модуль (140) контроля по четности, модуль (130) оценки вариаций, запоминающее устройство (150) и, по меньшей мере, один процессор (160). Модуль (110) дифференцирования спутниковых сигналов, модуль (120) вычисления двойных разностей, модуль (140) контроля по четности и модуль (130) оценки вариаций представляют собой программные модули, содержащиеся в среде (170) для хранения информации. Логическая схема (115) выбора является или программной, или аппаратной, и/или программно-аппаратной логической схемой. Модуль (110) дифференцирования спутниковых сигналов, модуль (120) вычисления двойных разностей, модуль (140) контроля по четности и модуль (130) оценки вариаций содержат машиночитаемый носитель с закодированными машинными командами на выполнение функций, описанных в настоящем документе. В одном из вариантов реализации заявленного изобретения модуль (110) дифференцирования спутниковых сигналов, модуль (120) вычисления двойных разностей, модуль (140) контроля по четности и модуль (130) оценки вариаций представляют собой один и тот же модуль.
Модуль (110) дифференцирования спутниковых сигналов коммуникативно связан с модулем (120) вычисления двойных разностей для ввода в него входных данных. В свою очередь модуль (120) вычисления двойных разностей коммуникативно связан с логической схемой (115) выбора также для ввода в нее входных данных. Логическая схема (115) выбора коммуникативно связана с модулем (140) контроля по четности и модулем (130) оценки вариаций для ввода в указанные модули входных данных, исходя из заданной пороговой величины, разрешающей контроль по четности. Модуль (140) контроля по четности коммуникативно связан с модулем (130) оценки вариаций с целью ввода в него входных данных. Для обеспечения выполнения программ процессор (160) коммуникативно связан с модулем (110) дифференцирования спутниковых сигналов, модулем (120) вычисления двойных разностей, модулем (140) контроля по четности и модулем (130) оценки вариаций. С модулем (110) дифференцирования спутниковых сигналов, модулем (120) вычисления двойных разностей, модулем (140) контроля по четности и модулем (130) оценки вариаций также коммуникативно связано запоминающее устройство (150), сопрягающее между собой все указанные модули для выполнения ими функций, описанных в настоящем документе.
Запоминающее устройство (150) может представлять собой любую память давно известного или недавно разработанного типа, подходящую для решения требуемых задач, например, оперативное запоминающее устройство (ОЗУ), энергонезависимую память, постоянное запоминающее устройство (ПЗУ) и/или регистраторы процессора (160). Среда (170) хранения данных представляет собой любое устройство давно известного или недавно разработанного типа, предназначенное для хранения информации, например, оперативное запоминающее устройство (ОЗУ), энергонезависимую память или постоянное запоминающее устройство (ПЗУ). В одном из вариантов реализации настоящего изобретения процессор (160) представлен микропроцессорами или микроконтроллерами. Более того, хотя на фиг. 1 процессор (160) и запоминающее устройство (150) представлены в качестве отдельных элементов, в одном из вариантов осуществления заявленного изобретения процессор (160) и запоминающее устройство (150) реализованы в виде единого устройства (например, отдельной интегральной схемы). В одном из вариантов осуществления настоящего изобретения процессор (160) представлен микросхемами поддержки процессора и/или микросхемами поддержки системы, такими как специализированные заказные интегральные схемы (СИС).
Теперь более подробно опишем реализацию функциональной схемы (100) обработки данных в привязке к фиг. 3А и 3В. Способ (300) описан в привязке к наземной станции (90) отслеживания вариаций задержки сигналов в ионосфере, проиллюстрированной на фиг. 1, а также в привязке к модулю (100) обработки данных, представленному на фиг. 2, хотя следует понимать, что способ (300) может быть реализован с использованием и других вариантов воплощения системы согласно настоящему изобретению, что станет очевидным любому специалисту в данной области техники после ознакомления с настоящим документом. Прохождение стадий способа (300) осуществляется в течение каждого периода выборки по каждому контрольному приемнику (251)-(254).
Способ (300) описан для четырех контрольных приемников (251)-(254) с использованием группировки спутников (200) (2-K) (где K - это целое число, которое меньше или равно N) для сопоставления данных с информацией по отслеживаемому спутнику (200-1). Спутники (200) (1-N) находятся в зоне видимости контрольных приемников (251)-(254). Как определено в настоящем документе, спутник считается находящимся в зоне видимости контрольного приемника, если радиочастотные сигналы, передаваемые со спутника, могут приниматься антенной с мощностью, достаточной для того, чтобы обеспечивать отслеживание этого спутника контрольным приемником.
На фиг. 3А и 3В представлены блок-схемы, иллюстрирующие один из вариантов реализации способа (300) отслеживания горизонтальных вариаций задержки, обусловленных аномалиями в ионосфере по линии визирования на спутник с наземного контрольного приемника станции, согласно настоящему изобретению. Способ (300) описан в привязке к наземной станции (90) отслеживания вариаций задержки в ионосфере, показанной на фиг. 1, а также в привязке к функциональной схеме (100), также представленной на фиг. 1, хотя следует понимать, что способ (100) может быть внедрен с использованием других вариантов реализации системы, что будет очевидно любому специалисту в данной области техники, который ознакомится с настоящим документом.
На стадии (302) осуществляется размещение, по меньшей мере, трех контрольных приемников (251), характеризующихся известным взаимным геометрическим соотношением. В одном из вариантов осуществления настоящего изобретения по известной схеме взаимного геометрического расположения размещено четыре контрольных приемника (251)-(254). На стадии (304) радиочастотные сигналы (450-1) и (450-2) принимаются одновременно с отслеживаемого спутника (200-1) и, по меньшей мере, с одного другого спутника (200-2), по меньшей мере, тремя контрольными приемниками (251)-(254). В одном из примеров реализации этого варианта осуществления настоящего изобретения радиочастотные сигналы (450) (1-K) принимаются одновременно с соответствующего отслеживаемого спутника (200-1) и других спутников (200) (2-K) в количестве K-1 четырьмя контрольными приемниками (251)-(254), где K - это целое число, которое меньше или равно N. Контрольные приемники способны определять, какой сигнал поступает с какого спутника по псевдослучайному коду, индивидуальному для каждого спутника, или по другим данным, полученным со спутника, которые могут быть использованы для его идентификации.
На стадии (306) контрольные приемники (251)-(254) генерируют результаты измерений фазы несущей по радиочастотным сигналам (450-1), полученным с отслеживаемого спутника (200-1), и радиочастотным сигналам (450-2), полученным одновременно с другого спутника (200-2). Если используются четыре контрольных приемника (251)-(254) и другие спутники (200) (2-K) в количестве K-1 в дополнение к отслеживаемому спутнику (200-1), то контрольные приемники (251)-(254) будут генерировать результаты измерений несущей по радиочастотному сигналу (450-1), полученному с отслеживаемого спутника (200-1), и радиочастотным сигналам (450) (2-K), полученным одновременно с других спутников (200) (2-K) в количестве K-1. В одном из вариантов осуществления настоящего изобретения для наблюдения за отслеживаемым спутником (200-1) используются все остальные спутники (200) (2-N). Контрольные приемники (251)-(254) передают информацию о сгенерированных результатах измерении фазы несущей в функциональную схему (100) обработки данных беспроводным способом или по проводным каналам (105) (см. фиг. 1).
На стадии (308) модуль (110) дифференцирования спутниковых сигналов функциональной схемы (100) обработки данных получает сгенерированные результаты измерений фазы несущей, по меньшей мере, с трех контрольных приемников (251)-(254).
На стадии (310) модуль (110) дифференцирования спутниковых сигналов определяет разности в результатах измерений фазы несущей между сигналами, полученными с отслеживаемого спутника, и, по меньшей мере, с одного другого спутника. Результаты измерения фазы несущей принимаются модулем (110) дифференцирования спутниковых сигналов, по меньшей мере, с трех контрольных приемников. Модуль (110) дифференцирования спутниковых сигналов определяет разности в результатах измерений фазы несущей между радиочастотными сигналами (450-1), полученными контрольными приемниками (251)-(254) с отслеживаемого спутника (200-1), и радиочастотными сигналами (450) (2-K), полученными контрольными приемниками (251)-(254), по меньшей мере, от группировки других спутников (200) (2-K).
Например, модуль (110) дифференцирования спутниковых сигналов сначала берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) первым контрольным приемником (251) и измерением мгновенного значения фазы несущей по второму спутнику (200-2) первым контрольным приемником (251). Затем модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) вторым контрольным приемником (252) и измерением мгновенного значения фазы несущей по второму спутнику (200-2) вторым контрольным приемником (252). Затем модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) третьим контрольным приемником (253) и измерением мгновенного значения фазы несущей по второму спутнику (200-2) третьим контрольным приемником (253). И затем, наконец, модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) четвертым контрольным приемником (254) и измерением мгновенного значения фазы несущей по второму спутнику (200-2) четвертым контрольным приемником (254).
Если в группировку других спутников входят два спутника (200) (2-3) (всего три спутника, включая отслеживаемый), то сначала модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) первым контрольным приемником (251) и измерением мгновенного значения фазы несущей по третьему спутнику (200-3) первым контрольным приемником (251). Затем модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) вторым контрольным приемником (252) и измерением мгновенного значения фазы несущей по третьему спутнику (200-3) вторым контрольным приемником (252). Затем модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) третьим контрольным приемником (253) и измерением мгновенного значения фазы несущей по третьему спутнику (200-3) третьим контрольным приемником (253). И затем, наконец, модуль (110) дифференцирования спутниковых сигналов берет разность между измерением мгновенного значения фазы несущей по первому спутнику (200-1) четвертым контрольным приемником (254) и измерением мгновенного значения фазы несущей по третьему спутнику (200-3) четвертым контрольным приемником (254).
Таким способом модуль (110) дифференцирования спутниковых сигналов устанавливает разности (K-1) δφmn,k по каждому контрольному приемнику, где m - это целое положительное число по m-му контрольному приемнику; n - это целое положительное число по n-му оцениваемому (отслеживаемому) спутнику; а k - это целое положительное число по k-му спутнику из числа остальных спутников.
Модуль (110) дифференцирования спутниковых сигналов определяет разности, которые могут быть отображены в матричной форме. Если задействовано четыре спутника (включая отслеживаемый), то матрица разностей по первому контрольному приемнику (251) будет иметь следующий вид:

Аналогичным образом модуль (110) дифференцирования спутниковых сигналов генерирует матрицу разностей по второму контрольному приемнику (252), которая приобретает следующий вид:

Аналогичным образом модуль (110) дифференцирования спутниковых сигналов генерирует матрицу разностей по третьему контрольному приемнику (253), которая приобретает такой вид:

И аналогичным образом модуль (110) дифференцирования спутниковых сигналов генерирует матрицу разностей и по четвертому контрольному приемнику (254), которая приобретает следующий вид:

Таким образом, модуль дифференцирования спутниковых сигналов рассчитывает разности (K-1) δφ по каждому контрольному приемнику, который вводит в него исходные данные, где K - это количество спутников в группировке. Эти разности отражают относительную фазу между радиочастотными сигналами (450) (1-K), переданными с первого спутника (200-1), и остальными спутниками в группировке (200) (2-K) в пределах от 0° до 360°. Модуль (110) дифференцирования спутниковых сигналов передает разности δφmn,k по спутникам в модуль (120) вычисления двойных разностей. Модуль (120) вычисления двойных разностей принимает разности δφmn,k по спутникам, переданные модулем (110) дифференцирования спутниковых сигналов.
В одном из примеров этого варианта осуществления настоящего изобретения модуль (110) дифференцирования спутниковых сигналов выполнен с возможностью выполнения двойной обработки результатов измерений фазы несущей по сигналам с отслеживаемого спутника и, по меньшей мере, с одного другого спутника. В этом случае модуль (100) обработки данных обнаруживает и исключает измерения в точке разрыва непрерывности (т.е. 0 или λ/2), как это описано в заявке на патент под названием «Наземная система и способ расширения возможностей обнаружения чрезмерных вариаций задержки методом двойной обработки данных», поданной под номером  в тот же день, что и настоящая заявка.
в тот же день, что и настоящая заявка.
На стадии (312) модуль (120) вычисления двойных разностей формирует двойные разности (dn,k) между парами контрольных приемников (270)-(274). Двойные разности по первой паре (270) представляют собой разницу в δφmn,k между первым контрольным приемником (251) и вторым контрольным приемником (252), которая математически описана следующим образом:

При использовании четырех контрольных приемников и трех других спутников (помимо отслеживаемого) двойные разности между первой парой (270) выводятся путем вычитания уравнения (1) из уравнения (2) с получением выражения dn,k[RR1,RR2]=δφ2n,k-δφ1n,k; двойные разности между второй парой (271) выводятся путем вычитания уравнения (1) из уравнения (3) с получением выражения dn,k[RR1,RR3]=δφ3n,k-δφ1n,k; а двойные разности между третьей парой (272) выводятся путем вычитания уравнения (1) из уравнения (4) с получением выражения dn,k[RR1,RR4]=δφ4n,k-δφ1n,k; и т.д.
На стадии (314) модуль (120) вычисления двойных разностей вводит поправку на известную разницу в положении контрольных приемников в парах. Такая коррекция представляет собой процесс введения поправки на геометрию, в ходе которого разница в положении проецируется на линию визирования на спутник. На этой стадии обработки данных используется известное взаимное геометрическое расположение общего контрольного приемника (251) (в парах (270)-(272)) и остальных контрольных приемников (252)-(254), а также единичный вектор, задающий линию визирования. Как было указано выше, известное взаимное геометрическое расположение обозначено вектором  , направленным от первого контрольного приемника (251) ко второму контрольному приемнику (252); вектором
, направленным от первого контрольного приемника (251) ко второму контрольному приемнику (252); вектором  , направленным от первого контрольного приемника (251) к третьему контрольному приемнику (253); вектором
, направленным от первого контрольного приемника (251) к третьему контрольному приемнику (253); вектором  , направленным от первого контрольного приемника (251) к четвертому контрольному приемнику (254); вектором
, направленным от первого контрольного приемника (251) к четвертому контрольному приемнику (254); вектором  , направленным от второго контрольного приемника (252) к четвертому контрольному приемнику (254); и вектором
, направленным от второго контрольного приемника (252) к четвертому контрольному приемнику (254); и вектором  , направленным от третьего контрольного приемника (253) к четвертому контрольному приемнику (254).
, направленным от третьего контрольного приемника (253) к четвертому контрольному приемнику (254).
На стадии (316) модуль (120) вычисления двойных разностей вводит поправку на отклонения антенны в зависимости от азимутального положения и угла возвышения между парами контрольных приемников (270)-(274). В одном из примеров этого варианта осуществления настоящего изобретения модуль (120) вычисления двойных разностей использует набор функций (например, сферические гармоники) для введения поправки на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами. В другом примере этого варианта реализации заявленного изобретения для введения поправки на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами модуль (120) вычисления двойных разностей использует табличные числа и интерполирование. Стадия (316) является опциональной, и в некоторых вариантах осуществления настоящего изобретения не предусмотрено введение поправок на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
На стадии (318) модуль (120) вычисления двойных разностей выполняет операцию по модулю или деление с остатком скорректированных двойных разностей. Операция по модулю ограничивает фазу диапазоном от минус половины длины волны до плюс половины длины волны (±λ/2) путем вычитания целого числа длины волны.
На стадии (320) модуль (120) вычисления двойных разностей усредняет двойные разности по остальным спутникам по построенным двойным разностям для пар (270), (271) и (272). Усредненные двойные разности по первому (отслеживаемому) спутнику (200-1) с привязкой к первой паре (270) контрольных приемников (251) и (252) будут выражены следующим образом:

Усредненные двойные разности по первому (отслеживаемому) спутнику (200-1) с привязкой ко второй паре (271) контрольных приемников (251) и (253) будут выражены следующей формулой:

Подобным же образом будут выражены усредненные двойные разности по первому (отслеживаемому) спутнику (200-1) с привязкой к третьей паре (272) контрольных приемников (251) и (254), а именно:

и т.д.
Если отслеживается более одного спутника (200) (1-N), то усредненные двойные разности по второму отслеживаемому спутнику (такому как спутник (200-2)) в привязке к первой паре (270) контрольных приемников (251) и (252) будут выражены следующим образом:

и т.д., что станет понятно любому специалисту в данной области техники после ознакомления с настоящим документом. Если усреднение проводится по всем остальным спутникам N-1, то член (1-N) заменяет член (1-K) в знаменателе уравнений (6)-(9), а член N заменяет член K в сумме.
В одном из примеров реализации этого варианта осуществления настоящего изобретения компоненты суммы в уравнениях (6)-(9) взвешены по фазовому шуму 1σ; при этом не все компоненты суммы характеризуются одинаковым весом, как это показано в уравнениях (6)-(9). Большинство ошибок, обусловленных шумом в радиочастотных сигналах (400) (1-Ν), можно спрогнозировать по стандартным моделям многолучевого распространения и теплового шума.
В одном из вариантов осуществления заявленного изобретения модуль (120) вычисления двойных разностей также фильтрует двойные разности с целью уменьшения уровня шума. В другом варианте реализации настоящего изобретения модуль вычисления двойных разностей также выполнен с возможностью усреднения скорректированных двойных разностей в динамике по времени. А еще в одном из вариантов осуществления настоящего изобретения модуль вычисления двойных разностей выполнен, как с возможностью усреднения скорректированных двойных разностей в динамике по времени, так и с возможностью фильтрации двойных разностей с целью уменьшения уровня шума.
Далее переходим от стадии (320), проиллюстрированной на фиг. 3А, к стадии (322), показанной на фиг. 3В.
На стадии (322) логическая схема (115) выбора определяет, превышает ли усредненная двойная разность, определенная в модуле (120) вычисления двойных разностей на стадии (320), заданную пороговую величину (также называемую в настоящем документе порогом двойной разности), разрешающую контроль по четности в отношении любой пары контрольных приемников (270)-(274). В одном из примеров реализации этого варианта осуществления настоящего изобретения порог двойной разности будет высоким при результатах измерений вблизи точки разрыва непрерывности. Если двойная разность превышает порог двойной разности по одной из пар контрольных приемников из числа (251)-(254) (см. фиг. 1) в период выборки, то логическая схема (115) выбора направляет усредненные скорректированные двойные разности в модуль (130) контроля по четности. В этом случае осуществляется переход от стадии (322) к стадии (324), на которой усредненные скорректированные двойные разности по парам контрольных приемников проходят контроль четности.
В течение периода выборки, когда результаты измерения проходят контроль четности на стадии (320), логическая схема (115) выбора не выдает результаты измерений в модуль (130) оценки вариаций без предварительного проведения контроля по четности. Таким образом, в течение каждого периода выборки логическая схема (115) выбора передает выходные данные, или в модуль (140) контроля по четности, или в модуль (130) оценки вариаций.
На стадии (324) проводится контроль по четности в модуле (140) контроля по четности. Модуль (140) контроля по четности выполнен с возможностью выдачи усредненных скорректированных двойных разностей, когда среднее значение скорректированных двойных разностей по другим спутникам (исключая отслеживаемый), количество которых равно, по меньшей мере, двум, превышает заданную пороговую величину, разрешающую контроль по четности. В ходе контроля по четности определяется, какая из всех перестановок результатов измерений (комбинаций изменений знаков +/-) характеризуется наименьшей четностью или четностью, которая меньше заданного порогового значения.
В ходе контроля по четности осуществляется коррекция несогласованных результатов измерений между парами контрольных приемников (270)-(274). Например, если результаты измерения по любой из пар контрольных приемников (270)-(274) составляют около ±λ/2 (т.е. вблизи точки разрыва непрерывности), то существует реальная вероятность того, что результаты измерений по парам контрольных приемников (270)-(274) будут аннулировать друг друга. Такое взаимное исключение результатов измерений вблизи точки разрыва непрерывности приводит к пропускам данных или некорректному повторному принятию данных. Например, если в ходе измерения одна из пар контрольных приемников (к примеру, (271)) дает результат в +95 м, а другая пара (273) контрольных приемников отсчитывает -95 мм, то при объединении этих результатов они «аннулируют» друг друга.
Модуль (140) контроля по четности выявляет и корректирует несогласованные результаты измерений путем определения четности (значения четности) по всем перестановкам результатов измерений (т.е. комбинаций изменений знаков +/-). В одном из примеров реализации этого варианта осуществления настоящего изобретения длина волны несущей спутникового сигнала составляет 190 мм, угловая разность фаз в 180 градусов равна «половине длины волны» или «95 мм», а порог двойной разности составляет плюс или минус «четверть длины волны» или «±45 мм».
Контроль результатов измерений по четности требует резервирования результатов измерений. Модуль (140) контроля по четности анализирует шесть измерений, выполненных парами (270)-(274) контрольных приемников в количестве четырех штук. Как минимум, необходимы результаты любых трех измерений, чтобы можно было охватить все пары контрольных приемников.
В одном из примеров реализации этого варианта осуществления настоящего изобретения проверяются все шесть доступных измерений, измерения вдоль векторов 
 , а также измерения по диагонально спаренным контрольным приемникам (252) и (253). В другом примере реализации этого варианта осуществления настоящего изобретения проверяются только четыре измерения по внешним границам схемы расположения контрольных приемников (251)-(254), т.е. вдоль векторов
, а также измерения по диагонально спаренным контрольным приемникам (252) и (253). В другом примере реализации этого варианта осуществления настоящего изобретения проверяются только четыре измерения по внешним границам схемы расположения контрольных приемников (251)-(254), т.е. вдоль векторов  ,
,  ,
,  и
и  . В этом случае в отношении диагональной пары (272) контрольных приемников и другой диагональной пары, состоящей из контрольных приемников (252) и (253), проверка не проводится.
. В этом случае в отношении диагональной пары (272) контрольных приемников и другой диагональной пары, состоящей из контрольных приемников (252) и (253), проверка не проводится.
По известной геометрии контрольных приемников (251)-(254) строится матрица Н измерений. Матрица Н с соответствующими результатами измерений четности схожа с дискриминантной матрицей Н, представленной ниже в виде уравнения (10).
По результатам измерений разностей вычисляется матрица V контроля по четности, удовлетворяющая проверочным уравнениям на четность VH=0 и VVT=I. Вектор  обозначает вектор измерения четности, аналогичный вектору, представленному ниже в виде уравнения (12). Если ряд измерений четности корректен (т.е. до точки разрыва непрерывности далеко), величина
обозначает вектор измерения четности, аналогичный вектору, представленному ниже в виде уравнения (12). Если ряд измерений четности корректен (т.е. до точки разрыва непрерывности далеко), величина  будет равна нулю, не считая шума в измерениях. В ходе контроля по четности устанавливается, является ли соотношение
будет равна нулю, не считая шума в измерениях. В ходе контроля по четности устанавливается, является ли соотношение  верным. Например, если множитель равен четырем, а шум равен 6 мм, то значение Vz должно быть менее 24 мм (4*6 = 24 мм), чтобы результат этого измерения был признан допустимым.
верным. Например, если множитель равен четырем, а шум равен 6 мм, то значение Vz должно быть менее 24 мм (4*6 = 24 мм), чтобы результат этого измерения был признан допустимым.
Если измерение некорректно (т.е. вблизи точки разрыва непрерывности на границе ±λ/2), то результат измерения может иметь ошибочный знак +/-. Это дает несовместимые результаты измерений. Модуль (140) контроля по четности проверяет все перестановки знаков +/- в измерениях. Для трех измерений предусмотрено восемь перестановок. Для четырех измерений предусмотрено 16 перестановок. Для пяти измерений выполняется 32 перестановки, а для шести измерений предусмотрено 64 перестановки. В одном из вариантов осуществления настоящего изобретения проверяется только половина перестановок, так как другая половина перестановок характеризуется таким же значением четности. Чем меньше значения четности, тем больше согласуются между собой (тем более корректны) измерения, соотнесенные с конкретной перестановкой.
На стадии (326) набор усредненных скорректированных двойных разностей выдается модулем (140) контроля по четности для их последующей обработки в модуле (130) оценки вариаций по значению четности пар контрольных приемников. С высокой долей вероятности корректной будет более одной перестановки. В одном из примеров реализации этого варианта осуществления настоящего изобретения предусмотрено следующее: при наличии более одной корректной перестановки с небольшим значением четности результаты измерений, полученные с пары контрольных приемников, которые характеризуются значениями четности, достаточно малыми для корректной перестановки, выдаются из модуля (140) контроля по четности в модуль (130) оценки вариаций.
В другом примере реализации этого варианта осуществления настоящего изобретения модуль (140) контроля по четности выполнен с возможностью направления - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных с парой контрольных приемников, которые характеризуются наименьшим значением четности из всех установленных значений четности. В еще одном из примеров реализации этого варианта осуществления настоящего изобретения модуль (140) контроля по четности выполнен с возможностью направления для дальнейшей обработки усредненных скорректированных двойных разностей, соотнесенных с парами контрольных приемников, характеризующихся значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
Результаты измерений с пары контрольных приемников с низким значением четности (т.е. наименьшим значением четности из всех рассчитанных) выдаются в модуль (130) оценки вариаций из модуля (140) контроля по четности. Входные данные, поступающие в модуль (130) оценки вариаций, представляют собой набор усредненных скорректированных (в том числе операцией по модулю) двойных разностей, характеризующихся наименьшим значением четности.
Если на стадии (322) логической схемой (115) установлено, что усредненная двойная разность, определенная в модуле (120) вычисления двойных разностей на стадии (320), не превышает порог двойной разности по любой паре контрольных приемников (270)-(274), то способ (300) осуществляет переход к стадии (328) без проведения контроля по четности. При переходе из модуля (120) вычисления двойных разностей (через логическую схему (115) выбора) без проведения проверки на четность модулем (140) контроля по четности, шум в результатах измерения по каждой выборке принудительно не изменяется с тем, чтобы он характеризовался таким же знаком +/- в нормальном режиме работы.
Модуль (120) вычисления двойных разностей коммуникативно связан с модулем (130) оценки вариаций с целью ввода в него исходных данных. Исходные данные, вводимые в модуль (130) оценки вариаций, представляют собой усредненные скорректированные (в том числе операцией по модулю) двойные разности. Усредненные скорректированные двойные разности принимаются модулем (130) оценки вариаций.
На стадии (328) модуль (130) оценки вариаций рассчитывает величину горизонтальной вариации задержки, обусловленной вариацией (22) в ионосфере (20) между отслеживаемым спутником (200-1) и парами (270)-(272) контрольных приемников (251)-(254), по вводным данным, получаемым с каждой выборкой, или из модуля (140) контроля по четности, или из модуля (120) вычисления двойных разностей. Теперь опишем вариант реализации алгоритмов, выполняемых, по меньшей мере, одним процессором (160) в функциональной схеме (100) обработки данных наземной станции (90), которые используются для расчета горизонтальных вариаций задержки по контрольным приемникам (251)-(254) (т.е. в этом случае только по трем контрольным приемникам). В настоящем документе группировка контрольных приемников (251)-(253) математически выражена следующим образом: {RR1, RR2, RR3}. Оси координат (х, у) лежат в касательной плоскости к поверхности наземной станции, в которой расположена наземная система; при этом указанная плоскость также именуется в настоящем документе горизонтальной плоскостью. Первый контрольный приемник RR1 находится в начале координатных осей (х, у). Второй контрольный приемник RR2 расположен в точке  , а третий контрольный приемник RR3 расположен в точке
, а третий контрольный приемник RR3 расположен в точке  относительно первого контрольного приемника RR1. Матрица Н вариационных измерений положения (размер 2×2) записывается следующим образом:
относительно первого контрольного приемника RR1. Матрица Н вариационных измерений положения (размер 2×2) записывается следующим образом:

Шум по каждому приемнику обозначается как {w1, w2, w3} для приемников {RR1, RR2, RR3}, соответственно. Вектор  шума в измерениях (размер 2×1) записывается следующим образом:
шума в измерениях (размер 2×1) записывается следующим образом:

Вектор измерения  (размер 2×1) определяется так:
(размер 2×1) определяется так:

где  (размер 2×1) - это истинный вектор чрезмерной вариации (измеряемой в модуле (130) оценки вариаций), а усредненные скорректированные двойные разности в z выражены в метрах и записаны следующим образом:
(размер 2×1) - это истинный вектор чрезмерной вариации (измеряемой в модуле (130) оценки вариаций), а усредненные скорректированные двойные разности в z выражены в метрах и записаны следующим образом:

Помехи {w1, w2, w3} включают в себя тепловой и широкополосной шум, многолучевой шум, остаточное отклонение антенны (после введения поправки) и вариации в пределах нормы. Вариация задержки в касательной плоскости (х, у) рассчитывается по усредненным скорректированным двойным разностям в  . Вектор
. Вектор  шума имеет коррелированные компоненты. Однако специфический шум каждого контрольного приемника не коррелируется с другими контрольными приемниками. Ковариационная матрица шума, R, будет в этом случае выглядеть следующим образом:
шума имеет коррелированные компоненты. Однако специфический шум каждого контрольного приемника не коррелируется с другими контрольными приемниками. Ковариационная матрица шума, R, будет в этом случае выглядеть следующим образом:

где σm2 - это дисперсия шума 1σ в m-ном контрольном приемнике RRm.
На стадии (330) модуль (130) оценки вариаций определяет, не превышает ли хотя бы один из вычисленных градиентов  выбранное пороговое значение Т вариации. Выбранное пороговое значение Т вариации сохраняется в запоминающем устройстве (150) или в среде (170) для хранения информации. Выбранное пороговое значение вариации устанавливается достаточно высоким с тем, чтобы оно не могло быть превышено только за счет шума. В разных направлениях шум может быть разным, и этот факт учитывается при задании порогового значения вариации. При наличии аномалии вариации вероятность пропуска данных pmd может быть рассчитана путем использования нецентрального распределения χ2.
выбранное пороговое значение Т вариации. Выбранное пороговое значение Т вариации сохраняется в запоминающем устройстве (150) или в среде (170) для хранения информации. Выбранное пороговое значение вариации устанавливается достаточно высоким с тем, чтобы оно не могло быть превышено только за счет шума. В разных направлениях шум может быть разным, и этот факт учитывается при задании порогового значения вариации. При наличии аномалии вариации вероятность пропуска данных pmd может быть рассчитана путем использования нецентрального распределения χ2.
На стадии (332) модуль (130) оценки вариаций сигнализирует об опасности, если рассчитанная величина горизонтальной вариации задержки превышает выбранное пороговое значение вариации. Такое оповещение об опасности может быть выражено в виде предупредительного сигнала и/или команды на исключение. В одном из вариантов осуществления настоящего изобретения команда на исключение подается из блока (95) отслеживания горизонтальной вариации задержки на передатчик (92) наземной станции. В другом варианте реализации заявленного изобретения из блока (95) отслеживания горизонтальной вариации задержки на передатчик (92) наземной станции подается предупредительный сигнал. В еще одном из вариантов осуществления настоящего изобретения предупредительный сигнал также передается из блока (95) отслеживания горизонтальной вариации задержки на наземную станцию (90); при этом наземная станция (90) коммуникативно связана с дисплеем для уведомления авиационного диспетчера на основании выдачи оповещения об опасности.
На стадии (334) наземная станция (90) предпринимает действия по прекращению передачи или по исключению отслеживаемых спутников, в которых зафиксирована аномалия, из процесса предоставления навигационных данных для самолета (40) по каналу (41) связи (фиг. 1), если, по меньшей мере, один из отслеживаемых спутников характеризуется рассчитанной вариацией задержки, превышающей заданное пороговое значение. Например, передатчик (92) наземной станции принимает команду на исключение, выданную модулем (130) оценки вариаций, и модифицирует сообщения, передаваемые на самолет (40), находящийся в этом районе, с тем, чтобы указанный самолет прекратил пользоваться информацией, получаемой с отслеживаемых спутников, в которых зафиксирована аномалия вариация. При необходимости, наземная станция (90) предпринимает действия по прекращению передачи с передатчика (92) наземной станции, если, по меньшей мере, один из отслеживаемых спутников характеризуется рассчитанной вариацией задержки, которая превышает заданное пороговое значение.
В одном из примеров реализации этого варианта осуществления настоящего изобретения все двойные разности формируются между первым контрольным приемником (251) и всеми остальными применимыми контрольными приемниками (252)-(254) для всех применимых спутников (200) (1-N), которые находятся в зоне видимости контрольных приемников (251)-(254). В другом примере реализации этого варианта осуществления настоящего изобретения двойные разности формируются между первым контрольным приемником (251) и всеми остальными применимыми контрольными приемниками (252)-(254) для группировки (200) (1-K) применимых спутников (200) (1-N), где K≤N. В другом варианте осуществления настоящего изобретения все спутники (200) (1-N), которые передают сигналы на контрольные приемники (251)-(254), представляют собой отслеживаемые спутники, а для определения горизонтальной вариации задержки спутниковых сигналов, поступающих с каждого из отслеживаемых спутников, используется - как это описано в настоящем документе - группировка других спутников. В еще одном из вариантов реализации заявленного изобретения все спутники (200) (1-N), которые передают сигналы на контрольные приемники (251)-(254), представляют собой отслеживаемые спутники, а для определения горизонтальной вариации задержки спутниковых сигналов, поступающих с каждого из отслеживаемых спутников, используются - как это описано в настоящем документе - все остальные спутники.
В одном из вариантов осуществления настоящего изобретения образуется взвешенная комбинация возведенной в квадрат компоненты x и возведенной в квадрат компоненты у, которая сравнивается со вторым пороговым значением вариации. Если пороговое значение вариации превышено по одному из спутников (например, n-му спутнику), а ни по одному из остальных спутников второе пороговое значение вариации не превышено, то в n-ом спутнике фиксируется аномалия, и этот n-й спутник исключается из процесса предоставления навигационных данных для самолета.
Варианты реализации систем и способов согласно настоящему документу, описанные в этой заявке, могут быть использованы для уменьшения угроз в отношении систем навигации в самолетах, которые несут в себе аномальные вариации плотности электронов в ионосфере.
Примеры
Пример 1 относится к функциональной схеме обработки данных для отслеживания горизонтальной вариации задержки спутниковых сигналов, которая включает в себя следующие элементы: 1) модуль дифференцирования спутниковых сигналов, выполненный с возможностью приема результатов измерений фазы несущей, по меньшей мере, с трех контрольных приемников, по меньшей мере, по двум спутникам; при этом в число, по меньшей мере, двух спутников входит один отслеживаемый спутник и, по меньшей мере, один другой спутник; при этом, по меньшей мере, три контрольных приемника характеризуются известным взаимных геометрическим расположением; и при этом модуль дифференцирования спутниковых сигналов определяет разности в результатах измерения фазы несущей между сигналами с отслеживаемого спутника и, по меньшей мере, с одного из других спутников; 2) модуль вычисления двойных разностей, выполненный с возможностью: формирования двойных разностей между одной или несколькими парами, по меньшей мере, трех контрольных приемников, исходя из разностей в результатах измерений фазы несущей; коррекции двойных разностей между парами с учетом известной разницы в положении контрольных приемников в парах; выполнения операции по модулю для ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны; и усреднения - для отслеживаемого спутника - двойных разностей по другим спутникам в количестве, по меньшей мере, двух штук; 3) модуль контроля по четности, выполненный с возможностью выдачи усредненных скорректированных двойных разностей, когда среднее значение скорректированных двойных разностей, по меньшей мере, по двум другим спутникам превышает заданное пороговое значение, разрешающее контроль по четности; и 4) модуль оценки вариаций, выполненный с возможностью оценки величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей, полученному из модуля контроля по четности.
Пример 2 относится к функциональной схеме обработки данных по пример 1; при этом указанная схема также включает в себя логическую схему выбора, выполненную с возможностью определения, не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности; и направления усредненных скорректированных двойных разностей в модуль контроля по четности в случае, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности.
Пример 3 относится к функциональной схеме обработки данных по любому из примеров 1-2; при этом модуль контроля по четности выполнен с возможностью выдачи для дальнейшей обработки набора усредненных скорректированных двойных разностей, соотнесенных с определенной парой контрольных приемников, которые характеризуются наименьшим значением четности из всех установленных значений четности.
Пример 4 относится к функциональной схеме обработки данных по любому из примеров 1-3; при этом модуль контроля по четности выполнен с возможностью выдачи для дальнейшей обработки набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся, по меньшей мере, одним значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
Пример 5 относится к функциональной схеме обработки данных по любому из примеров 1-4; при этом модуль вычисления двойных разностей выполнен также с возможностью фильтрации скорректированных двойных разностей с целью уменьшения уровня шума.
Пример 6 относится к функциональной схеме обработки данных по любому из примеров 1-5; при этом модуль вычисления двойных разностей выполнен также с возможностью введения поправок на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
Пример 7 относится к способу отслеживания вариации задержки сигнала с отслеживаемого спутника; при этом указанный способ включает в себя следующие стадии: 1) прием результатов измерений фазы несущей, по меньшей мере, с трех контрольных приемников; при этом, по меньшей мере, три контрольных приемника практически одновременно принимают радиочастотные сигналы с отслеживаемого спутника и, по меньшей мере, с одного другого спутника; при этом, по меньшей мере, три контрольных приемника характеризуются известным взаимным геометрическим расположением; 2) определение разностей в результатах измерения фазы несущей между сигналами с отслеживаемого спутника и, по меньшей мере, с одного другого спутника, по меньшей мере, по трем контрольным приемникам; 3) формирование двойных разностей между парами, по меньшей мере, трех контрольных приемников; 4) коррекция двойных разностей с учетом известной разницы в положении контрольных приемников в парах; 5) выполнение операции по модулю на скорректированных двойных разностях для ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны; 6) усреднение скорректированных двойных разностей, по меньшей мере, по одному спутнику, который не является отслеживаемым; 7) направление усредненных скорректированных двойных разностей в модуль контроля по четности, если усредненные скорректированные двойные разности превышают заданное пороговое значение, разрешающее контроль по четности; 8) выдачу набора усредненных скорректированных двойных разностей, полученных из модуля контроля по четности, в модуль оценки вариаций; и 9) оценку величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей.
Пример 8 относится к способу по примеру 7; при этом направление усредненных скорректированных двойных разностей в модуль контроля по четности, когда усредненные скорректированные двойные разности превышают заданное значение, разрешающее контроль по четности, предусматривает принятие решения в отношении того, не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности.
Пример 9 относится к способу по любому из примеров 7, 8; при этом он также включает в себя выдачу - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных с парой контрольных приемников, которые характеризуются наименьшим значением четности из всех установленных значений четности.
Пример 10 относится к способу по любому из примеров 7, 8; при этом он также включает в себя выдачу - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся соответствующим, по меньшей мере, одним значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
Пример 11 относится к способу по любому из примеров 7-10; при этом он также включает в себя стадию определения, не превышает ли рассчитанная величина горизонтальной вариации задержки выбранное пороговое значение.
Пример 12 относится к способу по примеру 11; при этом он также включает в себя стадию исключения отслеживаемого спутника из числа спутников, предоставляющих самолету навигационные данные, если рассчитанная величина горизонтальной вариации задержки превышает выбранное пороговое значение вариации.
Пример 13 относится к способу по любому из примеров 7-12; при этом он также включает в себя фильтрацию усредненных скорректированных двойных разностей с целью уменьшения уровня шума.
Пример 14 относится к способу по любому из примеров 7-13; при этом он также включает в себя введение поправки на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннам, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
Пример 15 относится к наземной системе отслеживания горизонтальной вариации задержки сигналов с отслеживаемого спутника, отличающейся тем, что она включает в себя следующие элементы: 1) по меньшей мере, три контрольных приемника, выполненных с возможностью практически одновременного приема радиочастотных сигналов с отслеживаемого спутника и, по меньшей мере, с одного другого спутника; при этом, по меньшей мере, три контрольных спутника характеризуются известным взаимным геометрическим расположением; и 2) функциональную схему обработки данных, коммуникативно связанную, по меньшей мере, с тремя контрольными приемниками; при этом указанная функциональная схема обработки данных выполнена с возможностью: приема результатов измерения фазы несущей по отслеживаемому спутнику и, по меньшей мере, одному другому спутнику, по меньшей мере, с трех контрольных приемников; определения разностей в результатах измерений фазы несущей между сигналами, переданными с отслеживаемого спутника и, по меньшей мере, с одного другого спутника, и практически одновременно принятыми, по меньшей мере, тремя контрольными приемниками; формирования двойных разностей между парами, по меньшей мере, трех контрольных приемников по разностям в результатах измерений фазы несущей; коррекции двойных разностей с учетом известной разницы в положении контрольных приемников в парах; выполнения операции по модулю с целью ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны; усреднения скорректированных двойных разностей для отслеживаемого спутника по другим спутникам в парах; ввода усредненных скорректированных двойных разностей в модуль контроля по четности, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности; и оценки величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей, введенных из модуля контроля по четности.
Пример 16 относится к наземной системе по примеру 15; при этом функциональная схема обработки данных выполнена также с возможностью определения, не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности; и направления усредненных скорректированных двойных разностей в модуль контроля по четности в случае, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности.
Пример 17 относится к наземной системе по любому из примеров 15, 16; при этом функциональная схема обработки данных выполнена также с возможностью выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся наименьшим значением честности из всех установленных значений четности.
Пример 18 относится к наземной системе по любому из примеров 15, 16; при этом функциональная схема обработки данных выполнена также с возможностью выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся, по меньшей мере, одним соответствующим значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
Пример 19 относится к наземной системе по любому из примеров 15-18; при этом функциональная схема обработки данных выполнена также с возможностью введения поправок на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
Пример 20 относится к функциональной схеме обработки данных по любому из примеров 16-18, отличающейся тем, что она выполнена также с возможностью выдачи, по меньшей мере, одного предупредительного сигнала или команды на исключение, если величина оцененной вариации задержки превышает выбранное пороговое значение вариации.
Хотя в настоящем документе проиллюстрированы и описаны конкретные варианты осуществления заявленного изобретения, специалистам в данной области техники понятно, что проиллюстрированные конкретные варианты осуществления заявленного изобретения могут быть заменены любой иной схемой, рассчитанной для достижения аналогичной цели. Настоящая заявка охватывает все изменения или модификации настоящего изобретения. Таким образом, очевидно, что заявленное изобретение ограничено исключительно пунктами формулы изобретения и их эквивалентами.
Изобретение относится к технике связи и может использоваться в системах спутниковой связи. Технический результат состоит в повышении надежности связи за счет обработки данных для отслеживания горизонтальной вариации задержки сигналов со спутников. Для этого схема обработки данных включает в себя модуль дифференцирования спутниковых сигналов, модуль вычисления двойных разностей, модуль контроля по четности и модуль оценки вариаций. Модуль дифференцирования спутниковых сигналов принимает результаты измерения фазы несущей по меньшей мере по двум спутникам по меньшей мере с трех контрольных приемников. Модуль дифференцирования спутниковых сигналов определяет разности в результатах измерения фазы несущей между сигналами, полученными с отслеживаемого спутника и по меньшей мере с одного спутника из числа иных спутников в количестве по меньшей мере одного. Модуль вычисления двойных разностей формирует двойные разности между парами контрольных приемников; корректирует двойные разности между парами приемников; выполняет операцию по модулю и усредняет двойные разности. Модуль контроля по четности вводит усредненные скорректированные двойные разности, если среднее значение превышает заданное пороговое значение, разрешающее контроль по четности. Модуль оценки вариаций выполнен с возможностью оценивания величины горизонтальной вариации задержки. 3 н. и 17 з.п. ф-лы, 4 ил.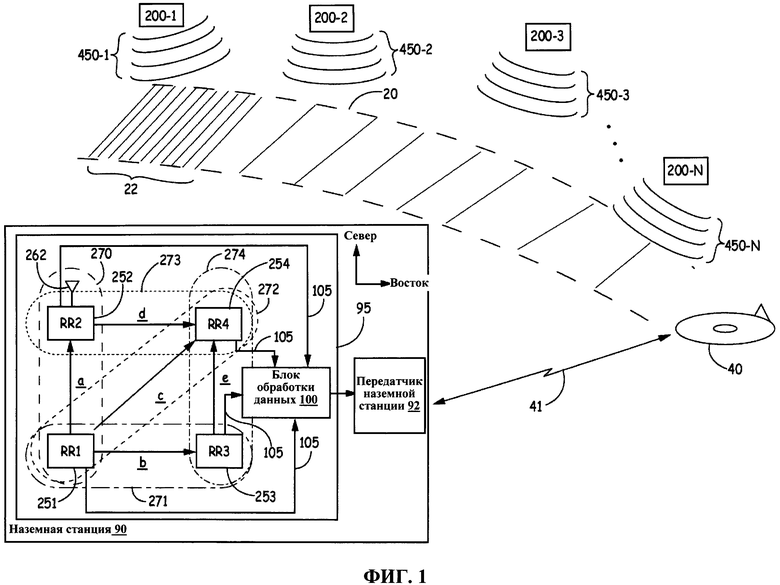
1. Функциональный модуль обработки данных для отслеживания горизонтальной вариации задержки спутниковых сигналов, включающий следующие элементы:
модуль дифференцирования спутниковых сигналов, выполненный с возможностью приема результатов измерений фазы несущей, по меньшей мере, с трех контрольных приемников, по меньшей мере, по двум спутникам; при этом в число, по меньшей мере, двух спутников входит один отслеживаемый спутник и, по меньшей мере, один другой спутник; при этом, по меньшей мере, три контрольных приемника характеризуются известным взаимных геометрическим расположением; и при этом модуль дифференцирования спутниковых сигналов определяет разности в результатах измерения фазы несущей между сигналами с отслеживаемого спутника и, по меньшей мере, с одного из других спутников;
модуль вычисления двойных разностей, выполненный с возможностью:
формирования двойных разностей между одной или несколькими парами, по меньшей мере, трех контрольных приемников, исходя из разностей в результатах измерений фазы несущей;
коррекции двойных разностей между парами с учетом известной разницы в положении контрольных приемников в парах;
выполнения операции по модулю для ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны; и
усреднения - для отслеживаемого спутника - двойных разностей по другим спутникам из числа, по меньшей мере, двух спутников;
модуль контроля по четности, выполненный с возможностью выдачи усредненных скорректированных двойных разностей, когда среднее значение скорректированных двойных разностей по другим спутникам из числа, по меньшей мере, двух спутников превышает заданное пороговое значение, разрешающее контроль по четности; и
модуль оценки вариаций, выполненный с возможностью оценки величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей, полученному из модуля контроля по четности.
2. Функциональный модуль обработки данных по п. 1, дополнительно включающий:
логическую схему, выполненную с возможностью:
определения, не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности; и
направления усредненных скорректированных двойных разностей в модуль контроля по четности в случае, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности.
3. Функциональный модуль обработки данных по п. 1, в котором модуль контроля по четности выполнен с возможностью выдачи для дальнейшей обработки набора усредненных скорректированных двойных разностей, соотнесенных с определенной парой контрольных приемников, которые характеризуются наименьшим значением четности из всех установленных значений четности.
4. Функциональный модуль обработки данных по п. 1, в котором модуль контроля по четности выполнен с возможностью выдачи для дальнейшей обработки набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся, по меньшей мере, одним значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
5. Функциональный модуль обработки данных по п. 1, в котором модуль вычисления двойных разностей выполнен также с возможностью фильтрации скорректированных двойных разностей с целью уменьшения уровня шума.
6. Функциональный модуль обработки данных по п. 1, в котором модуль вычисления двойных разностей выполнен также с возможностью введения поправок на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
7. Способ отслеживания вариации задержки сигналов с отслеживаемого спутника, включающий следующие стадии: прием результатов измерений фазы несущей, по меньшей мере, с трех контрольных приемников; при этом, по меньшей мере, три контрольных приемника практически одновременно принимают радиочастотные сигналы с отслеживаемого спутника и, по меньшей мере, с одного другого спутника; при этом, по меньшей мере, три контрольных приемника характеризуются известным взаимным геометрическим расположением;
определение разностей в результатах измерения фазы несущей между сигналами с отслеживаемого спутника и, по меньшей мере, с одного другого спутника, по меньшей мере, по трем контрольным приемникам;
формирование двойных разностей между парами, по меньшей мере, трех контрольных приемников;
коррекция двойных разностей с учетом известной разницы в положении контрольных приемников в парах;
выполнение операции по модулю на скорректированных двойных разностях с целью ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны;
усреднение скорректированных двойных разностей, по меньшей мере, по одному спутнику, который не является отслеживаемым;
направление усредненных скорректированных двойных разностей в модуль контроля по четности, если усредненные скорректированные двойные разности превышают заданное пороговое значение, разрешающее контроль по четности;
выдача набора усредненных скорректированных двойных разностей, полученных из модуля контроля по четности, в модуль оценки вариаций; и
оценка величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей.
8. Способ по п. 7, отличающийся тем, что направление усредненных скорректированных двойных разностей в модуль контроля по четности, когда усредненные скорректированные двойные разности превышают заданное пороговое значение, разрешающее контроль по четности, предусматривает принятие решения в отношении того:
не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности.
9. Способ по п. 7, дополнительно включающий:
стадию выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных с парой контрольных приемников, которые характеризуются наименьшим значением четности из всех установленных значений четности.
10. Способ по п. 9, дополнительно включающий:
стадию выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся соответствующим, по меньшей мере, одним значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
11. Способ по п. 7, дополнительно включающий:
стадию определения, не превышает ли рассчитанная величина горизонтальной вариации задержки выбранное пороговое значение.
12. Способ по п. 11, дополнительно включающий:
стадию исключения отслеживаемого спутника из числа спутников, предоставляющих самолету навигационные данные, если рассчитанная величина горизонтальной вариации задержки превышает выбранное пороговое значение вариации.
13. Способ по п. 7, дополнительно включающий:
стадию фильтрации усредненных скорректированных двойных разностей с целью уменьшения уровня шума.
14. Способ по п. 7, дополнительно включающий:
стадию введения поправки на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
15. Наземная система отслеживания горизонтальной вариации задержки сигналов с отслеживаемого спутника, включающая следующие элементы:
по меньшей мере, три контрольных приемника, выполненных с возможностью практически одновременного приема радиочастотных сигналов с отслеживаемого спутника и, по меньшей мере, с одного другого спутника; при этом, по меньшей мере, три контрольных спутника характеризуются известным взаимным геометрическим расположением; и
функциональную схему обработки данных, коммуникативно связанную, по меньшей мере, с тремя контрольными приемниками; при этом указанная функциональная схема обработки данных выполнена с возможностью:
приема результатов измерения фазы несущей по отслеживаемому спутнику и, по меньшей мере, одному другому спутнику, по меньшей мере, с трех контрольных приемников;
определения разностей в результатах измерения фазы несущей между сигналами, переданными с отслеживаемого спутника и, по меньшей мере, с одного другого спутника, и практически одновременно принятыми, по меньшей мере, тремя контрольными приемниками;
формирования двойных разностей между парами, по меньшей мере, трех контрольных приемников по разностям в результатах измерений фазы несущей;
коррекции двойных разностей с учетом известной разницы в положении контрольных приемников в парах;
выполнения операции по модулю с целью ограничения скорректированных двойных разностей диапазоном от минус половины длины волны до плюс половины длины волны;
усреднения скорректированных двойных разностей для отслеживаемого спутника по другим спутникам в парах;
ввода усредненных скорректированных двойных разностей в модуль контроля по четности, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности;
и оценки величины горизонтальной вариации задержки по набору усредненных скорректированных двойных разностей, введенных из модуля контроля по четности.
16. Наземная система по п. 15, отличающаяся тем, что функциональная схема обработки данных выполнена также с возможностью:
определения, не превышают ли усредненные скорректированные двойные разности по парам контрольных приемников заданное пороговое значение, разрешающее контроль по четности; и
направления усредненных скорректированных двойных разностей в модуль контроля по четности в случае, если среднее значение скорректированных двойных разностей превышает заданное пороговое значение, разрешающее контроль по четности.
17. Наземная система по п. 15, отличающаяся тем, что функциональная схема обработки данных выполнена также с возможностью выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, которые характеризуются наименьшим значением честности из всех установленных значений четности.
18. Наземная система по п. 15, отличающаяся тем, что функциональная схема обработки данных выполнена также с возможностью выдачи - для дальнейшей обработки - набора усредненных скорректированных двойных разностей, соотнесенных, по меньшей мере, с одной парой контрольных приемников, характеризующихся, по меньшей мере, одним соответствующим значением четности, которое меньше заданного порогового значения, разрешающего контроль по четности.
19. Наземная система по п. 15, отличающаяся тем, что функциональная схема обработки данных выполнена также с возможностью введения поправок на отклонения антенны в зависимости от азимутального положения и угла возвышения между антеннами, соотнесенные с соответствующими, по меньшей мере, тремя парами контрольных приемников.
20. Наземная система по п. 16, отличающаяся тем, что функциональная схема обработки данных выполнена также с возможностью выдачи, по меньшей мере, одного предупредительного сигнала или команды на исключение, если величина оцененной вариации задержки превышает выбранное пороговое значение вариации.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ОЦЕНКА НЕОДНОЗНАЧНОСТИ СИГНАЛОВ GNSS ДЛЯ ТРЕХ ИЛИ БОЛЕЕ НЕСУЩИХ | 2009 |
|
RU2503970C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

