Уровень техники
Изобретение относится к области разработки, описания и отслеживания деталей в промышленности, в частности деталей, которые подвергаются высоким уровням механических напряжений, как, например, детали авиадвигателей.
Известна технология рентгеновской компьютерной томографии (КТ). Эта экспериментальная технология использует эффект различного поглощения рентгеновских лучей различными материалами для построения трехмерного изображения детали при изучении посредством вычисления на основе последовательности рентгеновских изображений. Информация, содержащаяся в томографических изображениях, очень полезна, так как она относится ко всему объему детали и дает доступ не только к ее микроструктуре, но также и, по существу, к ее дефектам.
Тем не менее это богатство также приводит к двум основным сложностям. Во-первых, получение информации с хорошим пространственным разрешением требует большого числа рентгеновских изображений, и, таким образом, чтобы получить изображения, требуется длительное время, а также требуется, чтобы было доступно средство хранения данных большого объема. Более того, поиск дефектов сам по себе является трудной и ответственной операцией и не пригоден для автоматизации.
Также известны технологии сравнения изображений, которые аналогичны друг другу, известны под такими техническими названиями, как корреляция изображений или выравнивание изображений. Эти технологии состоят в наилучшем совмещении двух изображений, и это выполняют путем определения преобразования, принадлежащего выбранному классу. Остаточная разница (или "остатки") между изображениями после применения преобразования выявляет изменения (или дефекты, в зависимости от контекста), которые не были устранены преобразованием.
Между двумя изображениями часто имеют место модификации в виде движений жестких тел, а также в виде увеличения или деформации. Такие модификации могут составлять выбранные классы преобразований. Тогда можно вычислить остатки для оптимального преобразования в этом определенном классе.
Эту концепцию можно формализовать следующим образом. Значения уровня серого любой точки  в двух изображениях записывают как f1(x) и f2(x). Также вводят множество
в двух изображениях записывают как f1(x) и f2(x). Также вводят множество  преобразований (класс преобразований), такое, что для всех преобразований
преобразований (класс преобразований), такое, что для всех преобразований  , изображение
, изображение  становится преобразованным изображением T[f] (где T - это функция, действующая на все изображение
становится преобразованным изображением T[f] (где T - это функция, действующая на все изображение  ). Полезно найти преобразование T* (оптимальное преобразование), которое достигает минимума:
). Полезно найти преобразование T* (оптимальное преобразование), которое достигает минимума:

Остаток представляет собой новое изображение g, задаваемое следующим образом:

Более того, общий класс преобразований является классом, индуцированным множеством полей непрерывных смещений, u(x), так что:

Топологическая разница Δ(f1, f2) двух изображений представляет собой остаточное поле g, полученное, когда класс, по которому выполняли оптимизацию, является классом полей непрерывных смещений.
Тем не менее, в качестве примера, также можно изменить яркость и контраст изображения с помощью аффинного преобразования, так что:

Также можно скомбинировать несколько преобразований этого типа, чтобы ограничить вовлеченные параметры или поля так, чтобы удовлетворить определенным ограничениям либо дать им больше свободы. Например, два параметра аффинных преобразований, описанных выше (α и β), можно вычислить как функцию координат исследуемого воксела.
Хотя для корреляции изображений существуют некоторые коммерческие программы, обычно они не дают доступ к необработанному и полному преобразованию T*, которое минимизирует разницу между изображениями, так как поля смещений часто строят не глобально, а путем интерполяции между отдельными локальными смещениями. Более того, зачастую коррекции яркости и контраста не доступны. На практике, таким образом, преобразование Т* часто не используют, даже несмотря на то, что топологическую разность используют, напр., для распознавания лица, предмета или определенной формы, напр., при построении изображений в медицине.
В некоторых случаях, таких как автоматическое распознавание, единственная часть выравнивания изображения, которую используют, представляет собой связь с эталоном, когда норма остатка полагается малой. Наконец, даже если пользователю компьютерной программы можно было бы предложить использовать остаток или топологическую разницу на экране, их редко получают в таком виде, который можно экспортировать из программы корреляции изображений.
Определение изобретения и соответствующих преимуществ.
Для преодоления вышеупомянутых трудностей предложен способ описания детали, причем способ содержит этап получения рентгеновского томографического изображения детали, а затем этап корреляции упомянутого изображения с эталоном, причем способ отличается тем, что этап корреляции содержит поиск среди предварительно заданного множества, или класса, преобразований рентгеновского томографического изображения такого преобразования, которое минимизирует разницу между упомянутым изображением и эталоном, чтобы описать внутреннюю часть детали.
В частности, но не обязательно, множество преобразований может включать в себя поля непрерывных смещений, причем для каждого поля возможна дискретизация.
Предпочтительно, способ применяет непрерывную параметризацию упомянутого множества преобразований.
Преимущество этого способа можно понять из последующего обсуждения. В частности, параметризация соответствующего пространства  имеет намного меньшую размерность, чем само изображение.
имеет намного меньшую размерность, чем само изображение.
Более конкретно, по меньшей мере в теории, можно точно наложить два томографических изображения одного и того же объекта, перемещая жесткое тело с шестью степенями свободы, применяя коэффициент масштабирования с одной степенью свободы, и линейно регулируя уровни серого с двумя степенями свободы. Таким образом, чтобы скоррелировать эти два изображения, необходимо определить девять неизвестных. Это число является размерностью пространства , и его следует сравнить со сложностью определения всего изображения порядка 1 гигавокселей, т.е. 109 неизвестных. Таким образом, зная преобразование T*, можно добиться существенной экономии с точки зрения данных. Это также позволяет получить непосредственно топологическую разность Δ(f1, f2) и найти дефекты, которые несовместимы с классом преобразований. Также можно использовать преобразования, которые являются более сложными, чем упомянутые выше.
Это позволяет обеспечить быстрое определение 3D изображения детали посредством вышеописанной характеристики, в которой используют множество преобразований, которые надо применить, от одного или нескольких эталонных изделий, используя при этом меньшее число рентгеновских изображений, чем в обычных способах. Это увеличение скорости получения изображений означает, что томографическое оборудование будет занято в течение более короткого промежутка времени. Достигают этого за счет меньшей избыточности информации, так как делают меньше рентгеновских изображений, а также за счет увеличения количества вычислений, но во множестве ситуаций эти два аспекта не являются помехой.
В качестве примера, множество преобразований содержит по меньшей мере одно множество непрерывных смещений (с изменением масштаба или без него), по меньшей мере одно множество изменений яркости и контраста или по меньшей мере одно множество изменений масштаба (с непрерывными смещениями или без них).
В реализации эталон представляет собой изображение стандартной детали. В частности, таким способом или по-другому, можно определить, является ли определенная деталь допустимой, напр., используя преобразование, полученное в результате поиска. Установлено, что в таких условиях допустимость детали можно формализовать, выражая условия через найденное преобразование T*.
В одном варианте эталон представляет собой изображение детали, называемое "виртуальным", построенное из компьютерной модели.
Множество преобразований может содержать по меньшей мере преобразования, соответствующие модификациям по меньшей мере одного параметра модели детали.
Как вариант, в сочетании с вышеописанными аспектами способ также может включать в себя модификацию параметризации компьютерной модели детали с использованием преобразования, найденного в результате поиска.
В одном варианте, эталон содержит явное представление границ детали и ее компонентов или элементов, если таковые имеются. Тогда упомянутое множество преобразований может содержать по меньшей мере класс преобразований, которые сохраняют топологию. Если деталь имеет несколько компонентов, то найденное оптимальное преобразование T* дает изображение, сегментированное на основе априорного знания об изделии. Сегментация также может быть выполнена по-другому, но также с помощью полученного преобразования.
В одном варианте эталон является представлением элементарного шаблона, напр. фазомодулированного периодического шаблона.
Способ может быть выполнен с использованием в качестве эталона рентгеновского томографического изображения детали, причем деталь была подвержена механической нагрузке в промежутке между получением двух изображений. Тогда топологическая разность позволяет идентифицировать дефекты (в вышеопределенном смысле, не удаляемые выбранным классом преобразований) как вызванные нагрузкой. Тогда можно таким способом или по-другому определить, является ли природа дефекта и, в частности, его размер, форма или расположение, допустимой с точки зрения функциональных спецификаций, правил или ограничений действующих стандартов.
Способ может быть выполнен, в частности, для детали, изготовленной из композитного материала, или лопасти турбореактивного самолета, которая, в частности, может быть изготовлена из композитного материала армированного волокном, напр. из тканых материалов.
Описание чертежей
Описание изобретения продолжается ниже со ссылкой на прилагаемые чертежи.
На фиг. 1 показана реализация изобретения.
На фиг. 2 и 3 показаны примеры этой реализации.
На фиг. 4 показана вторая реализация изобретения.
На фиг. 5 показана эта реализация.
На фиг. 6 показана третья реализация изобретения.
Описание вариантов осуществления
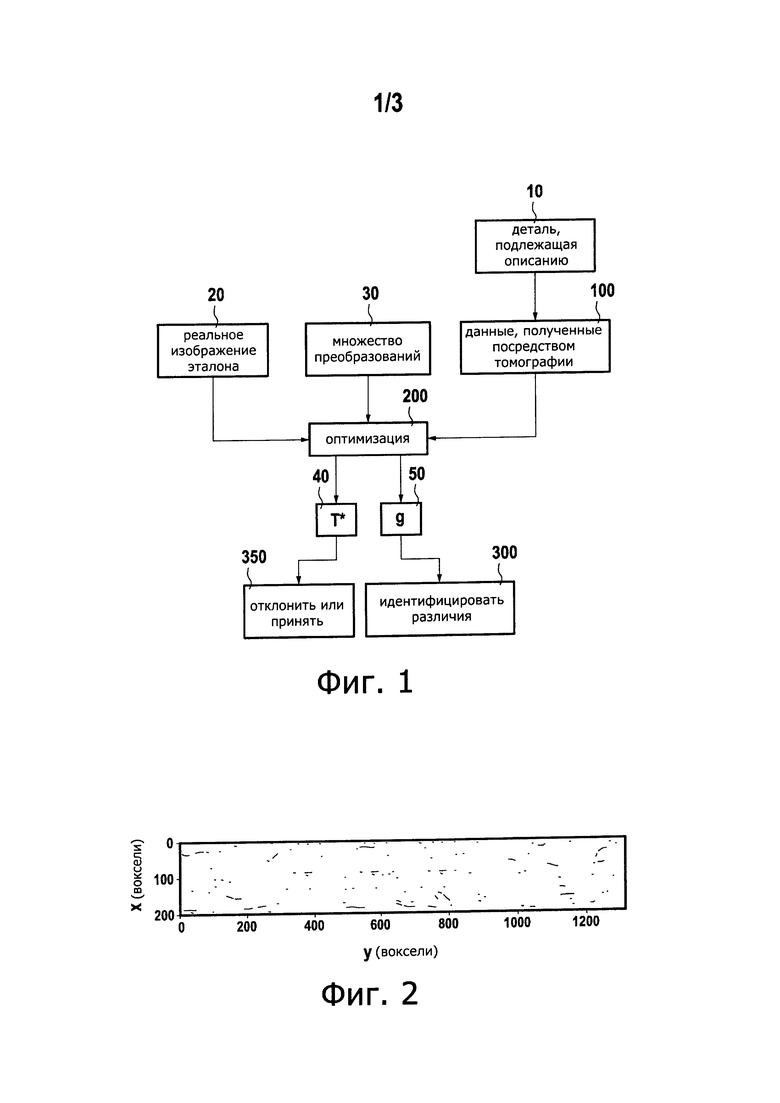
В реализации, показанной на фиг. 1, используют реальное эталонное изображение 20, такое как изображение детали, используемое в качестве стандарта или шаблона. Деталь 10, напр. деталь из композитного материала, реконструируют в виде необработанного томографического изображения детали 10, полученного из некоторого количества томографических данных 100 (напр., из некоторого числе проекций), которые могут быть небольшими. Реконструкцию выполняют с использованием множества преобразований 30, которые считаются реалистичными. Вычисление основано на этапе поиска и идентификации преобразования T* (ссылочная позиция 40) во множестве 30. Эту идентификацию выполняют путем поиска минимума (оптимизация 300), как было описано во введении. Одновременно определяют соответствующую топологическую разность Δ (ссылочная позиция 50).
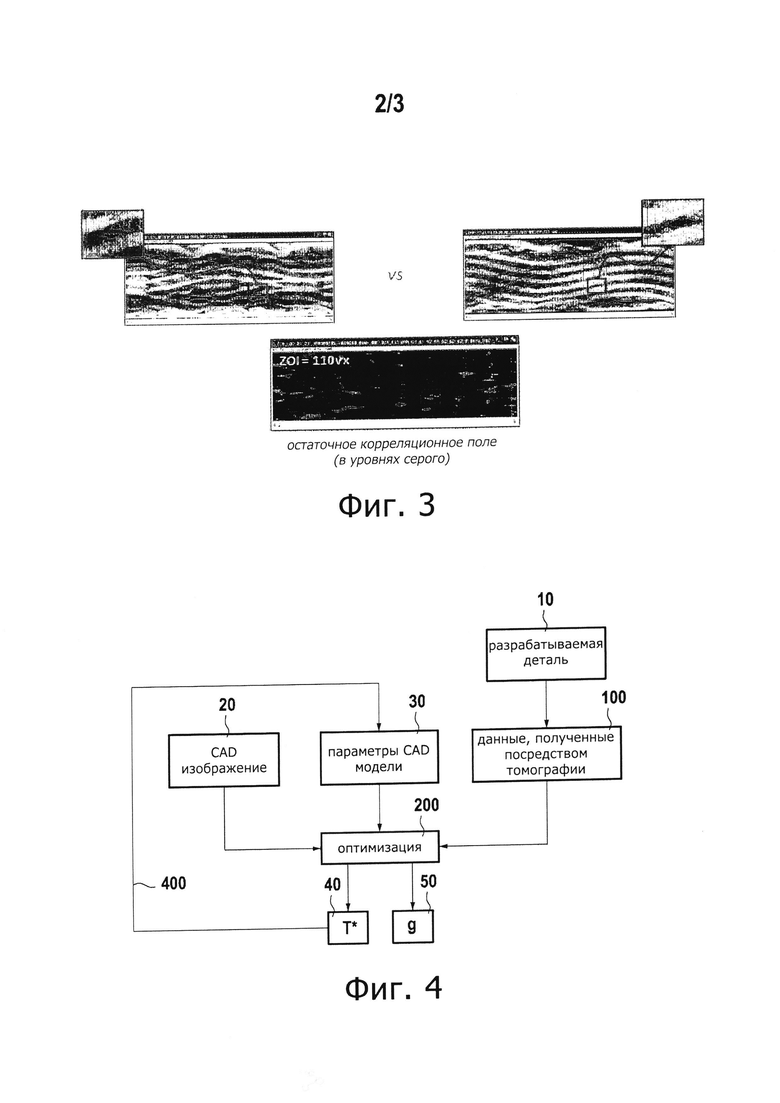
В одном варианте разницы между изучаемой деталью и стандартной деталью эффективно находят и идентифицируют с использованием топологической разницы Δ (ссылочная позиция 50) на этапе 300. Например, как показано на фиг. 2, сравнение томограмм для детали из композитного материала до и после испытаний под нагрузкой очень явно показывает наличие мезотрещин.
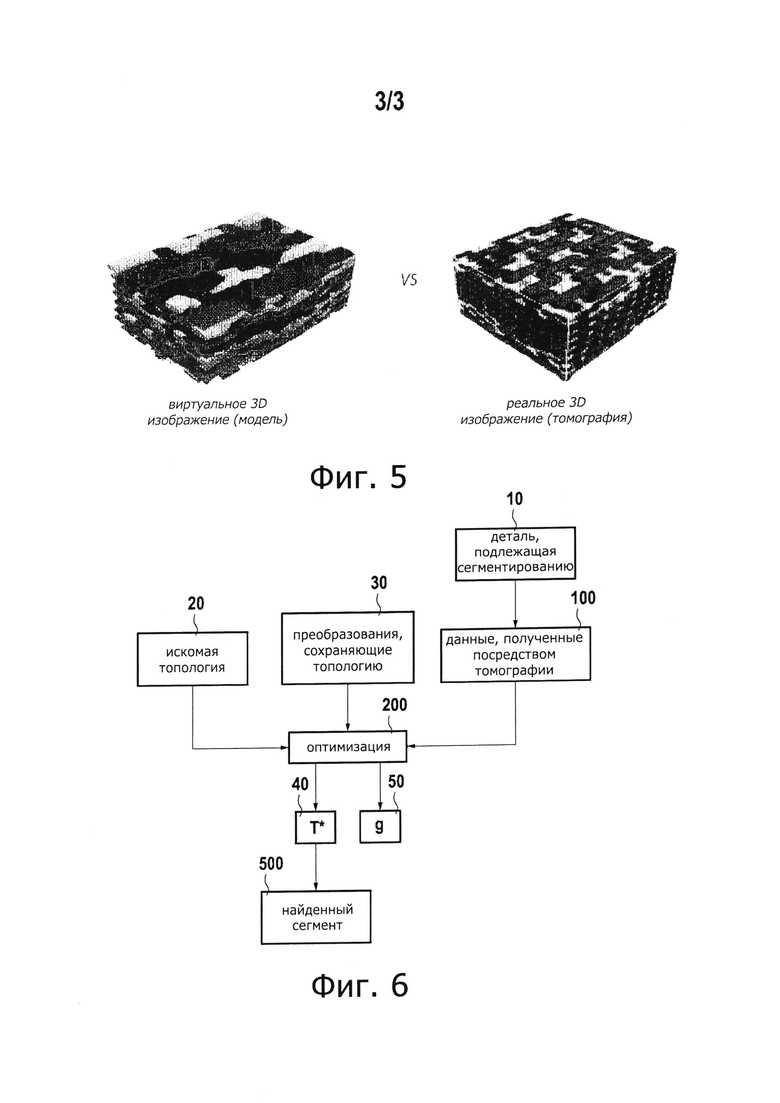
Также можно установить корреляцию между двумя различными образцами и, если они являются деталями, выполненными из композитного материала, это может выявить различия с точки зрения переплетения между двумя образцами. Это показано на фиг. 3.
В общем, таким образом, можно выполнить неразрушающие испытания (NDT) деталей из композитных материалов, напр. турбореактивных лопастей. Описанная технология приводит к экономии времени на исследование и получение и хранение данных. Таким образом, например, на этапе 350 можно только на основании преобразования T* принять решение о том, следует ли оставить деталь или отбросить.
В другой реализации, показанной на фиг. 4, ставят в соответствие два изображения, одно реальное изображение, а другое изображение, называемое "виртуальным", напр. изображение 20, полученное из компьютерной модели (CAD) детали.
В таких условиях параметры 30 CAD модели могут сами содержать специфический класс преобразований. Таким образом, томографические данные можно использовать на основании изображения CAD модели, записывая томографическое изображение непосредственно на языке описания, пригодном для диалога с проектной группой разработчиков детали.
Тогда диалог состоит в предоставлении в виде CAD модели хорошего предопределения решения для способствования построению томографического изображения (этап 200) на основе томографических данных. Тогда в ответ, изображение, построенное таким способом, позволяет на этапе 400 скорректировать CAD модель посредством параметров идентифицированного преобразования T*, так чтобы она была настолько близка к реально выполненной детали, настолько это возможно.
Способ выполняют до тех пор, пока используемый алгоритм не сойдется или не станет стационарным, напр., в простом контексте настраиваемых уровней серого.
Дефекты ориентации или выравнивания могут негативно повлиять на отклик всей композитной структуры, и предложенная начальная регулировка является хорошим способом улучшения и проверки CAD модели, учитывающим такие несовершенства.
Могут быть выработаны 3D модели, которые выполнены дискретными в виде отдельных вокселей или которые представлены параметрической моделью или компьютерной (CAD) моделью, на основе априорного знания о плетеном массиве композитных армированных волокном материалов. Таким образом, можно скоррелировать изображение детали и изображение, полученное из пресс-формы, и модифицировать входные параметры модели, т.е. направления нитей, а также их размеры. Например, на фиг. 5 показано изображение, полученное посредством томографии, и изображение модели.
В одном варианте, если пути, по которым следуют нити, не включены в эталонное изображение, полученное CAD моделью, то пути нитей определяют непосредственно из томографического изображения, напр., используя алгоритм отслеживания, на который подают результаты корреляции с эталонным изображением, полученным CAD моделью.
В варианте, показанном на фиг. 6, изображения являются сегментированными. Сегментация 500 состоит в идентификации специфических компонентов на изображении, напр., нитей или волокон, или элементарных шаблонов (напр., фазомодулированных периодических шаблонов), которые, возможно, могут содержаться в базе данных, составляющей словарь. Если доступно теоретическое представление предмета (искомая топология 20), который надо идентифицировать, то можно скоррелировать 3D изображения этого предмета с данными 100, полученными посредством томографии. Используемые преобразования 30 выполняют для наложенной топологии, и можно надежно сохранить топологию эталонного предмета.
С использованием идентифицированного преобразования T* заданный компонент на эталонном изображении может быть расположен на изображении и может быть деформирован, чтобы соответствовать реальному изображению.
Таким образом, если необходимо найти замкнутую кривую, то достаточно начать с идеального изображения замкнутой линии, например с окружности, а затем позволить ей постепенно измениться до линии, которая присутствует на изображении среды.
Этот подход является более надежным, чем обычные технологии пороговой фильтрации и сегментации, которые автоматически не сохраняют корректную топологию для искомого предмета. Таким образом, с этими технологиями получают пропущенные точки на кривой, которая должна быть замкнутой, или получают толстую кривую, когда она должна быть тонкой.
Сегментация, выполняемая описанным способом, т.е. автоматически на основе ранее заданного топологического элемента, служит для минимизации промежуточных этапов фильтрации изображения, когда вклад шума, смещения и измерений не всегда легко определить и, таким образом, когда информация легко размывается при такой фильтрации.
Изобретение не ограничено описанными реализациями, но распространяется на любой вариант в рамках объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ДАННЫХ | 2019 |
|
RU2715013C1 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ДАННЫХ | 2015 |
|
RU2701710C1 |
| УСТРОЙСТВО РЕНТГЕНОВСКОЙ ТОМОГРАФИИ | 2012 |
|
RU2585801C2 |
| Способ и система контроля заготовок | 2020 |
|
RU2788953C1 |
| Способ 3D-реконструкции человеческой головы для получения рендера изображения человека | 2022 |
|
RU2786362C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КАРТОГРАФИИ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1998 |
|
RU2204149C2 |
| Способ неразрушающего контроля детали турбомашины | 2017 |
|
RU2741744C2 |
| СПОСОБ, СИСТЕМА И НЕ-ВРЕМЕННЫЙ СЧИТЫВАЕМЫЙ КОМПЬЮТЕРОМ НОСИТЕЛЬ ДЛЯ РАСПРЕДЕЛЕНИЯ МНОЖЕСТВА СЛОЕВ КОМПОЗИТА В СТРУКТУРНОМ ОБЪЕМЕ, СОДЕРЖАЩЕМ ВКЛЮЧЕНИЕ | 2016 |
|
RU2688261C1 |
| СПОСОБ ПОСТРОЕНИЯ И ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2019 |
|
RU2728949C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНТРОЛЬНОГО ОБРАЗЦА ЛОПАТКИ ИЗ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2450922C2 |
Использование: для контроля детали посредством рентгеновской томографии. Сущность изобретения заключается в том, что получают рентгеновское томографическое изображение детали, а затем выполняют этап, на котором коррелируют упомянутое изображение с эталоном, причем на этапе корреляции осуществляют поиск среди заданного множества преобразований рентгеновского томографического изображения такого преобразования, которое минимизирует разницу между изображением и эталоном для описания внутренней части детали. Технический результат: обеспечение возможности быстрого получения 3D изображения детали, используя при этом меньшее число рентгеновских изображений, чем в обычных способах. 15 з.п. ф-лы, 6 ил. 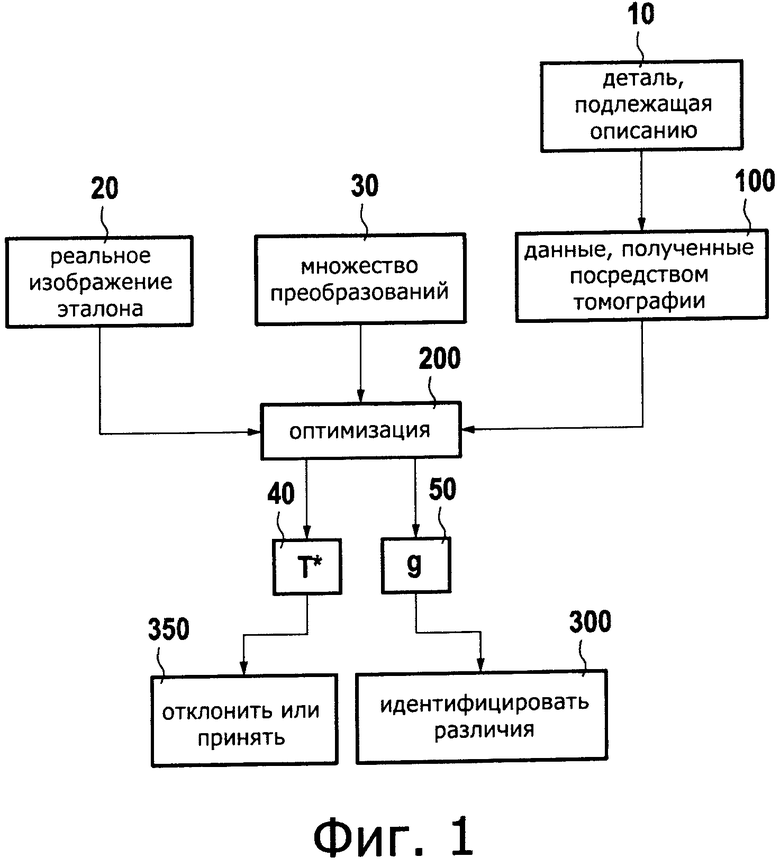
1. Способ описания детали (10), содержащий этап, на котором получают рентгеновское томографическое изображение (100) детали, а затем этап (200), на котором коррелируют упомянутое изображение с эталоном (20), причем на этапе (200) корреляции осуществляют поиск среди заданного набора (30) преобразований рентгеновского томографического изображения такого преобразования (40), которое минимизирует разницу (50) между изображением и эталоном, для описания (300, 350; 400; 500) внутренней части детали (10).
2. Способ описания детали по п. 1, в котором используют непрерывную параметризацию упомянутого набора (30) преобразований.
3. Способ описания детали по п. 1 или 2, в котором упомянутый набор (30) преобразований включает в себя по меньшей мере один набор непрерывных смещений, по меньшей мере один набор изменений яркости и контраста или по меньшей мере один набор изменений масштаба.
4. Способ описания детали по п. 1 или 2, в котором эталон (20) содержит изображение стандартной детали.
5. Способ описания детали по п. 1 или 2, в котором определяют (350), является ли деталь (10) приемлемой, используя извлеченное преобразование (40).
6. Способ описания детали по п. 1 или 2, в котором упомянутый набор (30) преобразований содержит по меньшей мере преобразования, соответствующие модификациям по меньшей мере одного параметра модели детали.
7. Способ описания детали по п. 1 или 2, в котором эталон (20) содержит изображение детали, построенное на основе компьютерной модели.
8. Способ описания детали по п. 1 или 2, в котором модифицируют (400) параметризацию компьютерной модели детали с использованием преобразования, найденного в результате поиска.
9. Способ описания детали по п. 1 или 2, в котором упомянутый набор (30) преобразований содержит по меньшей мере класс преобразований, сохраняющий топологию.
10. Способ описания детали по п. 1 или 2, в котором эталон (20) содержит явное представление границ элемента детали.
11. Способ описания детали по п. 1 или 2, в котором сегментируют (500) изображение с использованием преобразования, найденного в результате поиска.
12. Способ описания детали по п. 1 или 2, в котором эталон (20) содержит представление элементарного шаблона.
13. Способ описания детали по п. 1 или 2, в котором эталон (20) включает в себя ранее полученное рентгеновское томографическое изображение детали, причем деталь была подвергнута воздействию механической нагрузки в промежутке между получениями двух изображений.
14. Способ описания детали по п. 1 или 2, в котором деталь (10) представляет собой деталь из композитного материала.
15. Способ описания детали по п. 1 или 2, в котором деталь (10) представляет собой лопасть турбореактивного самолета.
16. Способ описания детали по п. 1 или 2, в котором получают топологическую разность между изображением и эталоном.
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОЙ ОЦЕНКИ РАСПРЕДЕЛЕНИЯ ПЛОТНОСТИ И ЭФФЕКТИВНОГО АТОМНОГО НОМЕРА ВЕЩЕСТВА | 2000 |
|
RU2168717C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНТРОЛЬНОГО ОБРАЗЦА ЛОПАТКИ ИЗ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2442128C2 |
| US 20100278440 A1, 04.11.2010 | |||
| US 6041132 A, 21.03.2000 | |||
| US 6341153 B1, 22.01.2002. | |||

