Область техники, к которой относится изобретение
Изобретение относится к области малогабаритных авиационных средств вертикального взлета и посадки (мультикоптер) для выполнения задач различного спектра: мониторинга местности, аэрофотографирования и воздушного наблюдения, воздушной доставки грузов, поиска людей и т.п., в частности в беспилотных режимах работы и с возможностью передачи информации, получаемой бортовыми датчиками, на наземную станцию управления в реальном масштабе времени.
Уровень техники
В настоящее время широкое распространение получили авиационные устройства вертикального взлета и посадки мультироторного типа, в частности беспилотные летательные аппараты (БПЛА, называемые еще дронами), среди которых наибольшее распространение получили беспилотные мультикоптеры с четырьмя несущими винтами - квадрокоптеры. Они применяются как в бытовой сфере, в качестве летающих игрушек, так и в профессиональной для проведения видеосъемки или видеонаблюдения, доставки грузов и т.д. Профессиональные БПЛА-мультикоптеры могут достигать взлетной массы от нескольких килограмм до десятков килограмм и размеров более 1-1,5 метра, вследствие чего это предъявляет повышенные требования к прочности их конструкции. Вместе с тем относительно небольшое время полета таких БПЛА (как правило не более одного часа) вынуждает осуществлять их запуск в непосредственной близости от района выполнения полетного задания, что требует наземной транспортировки комплексов БПЛА и соответствующей степени мобильности. Поэтому эти комплексы создают максимально компактными для удобства транспортирования и разворачивания в рабочее состояние для полетов непосредственно в районе применения. Таким образом, существует потребность в разработке и реализации механизмов складывания-раскладывания мультироторных лучей, которые позволили бы упростить транспортировку и хранение таких дронов, а также, при этом обладали бы весовыми и прочностными характеристиками, необходимыми для надежного и безопасного применения в летающих конструкциях.
Поэтому для таких устройств очень важны характеристики технических решений по складыванию дронов для хранения или транспортировки и разворачивания для полетной работы, которые должны быть удобно простыми и надежными при минимальной массе используемых для их реализации устройств.
Известно техническое решение складного мультикоптера (патент CN201367115Y от 2008.1117 г.), в котором квадрокоптер содержит основание в виде дискообразной пластины, на которой снизу ближе к ее центру шарнирно установлены на осях внутренние концы четырех консольных трубчатых стрел, на внешних концах которых размещены винтомоторные узлы с электромоторами, причем такая шарнирная навеска стрел выполнена с возможностью их складывания «зонтиком» (то есть в вертикальной по отношению к корпусу дрона плоскости) для удобного хранения и транспортировки, а также оперативного разворачивания в полетное положение дрона. Для этого на внутренних концах стрел размещены горизонтально распложенные шарнирные наконечники, которые надеты на оси, прикрепленные в центральной части основания квадрокоптера. Возможностью совершения стрелами вращательного движения на этих осях в вертикальной плоскости, позволяет складывать их в единый пакет вертикально вплотную друг к другу при хранении, транспортировке и разворачивать стрелы в четыре стороны с их жесткой фиксацией на внешнем крае основания с помощью установленных там пружинных фиксаторов (С-образного профиля).
Описанный механизм складывания, развертывания и фиксации положения консольных лучей имеет существенный недостаток для использования его на мультикоптерах с распределением грузоподъемности более 1,5 килограмм на каждую шарнирную ось. Так как винтомоторные группы для таких тяговых характеристик имеют значительную массу на внешних концах консолей лучей, то под действием существенных сил инерции существует возможность выхода консолей из фиксаторов при изменении вертикального ускорения (например, при посадке), что приведет к повреждениям винта и электромотора.
Известно техническое решение складного коптера (патент RU188461U1 от 29.12.2018 г.), в котором его лучи складываются вращением внутренних концов вокруг вертикальных осей и фиксируются в развернутом положении с помощью скользящих П-образных скоб и подпружиненных сквозных поперечных пальцев-защелок. Такая конструкция способна обеспечить высокую степень компактизации квадрокоптера путем складывания телескопических лучей горизонтально по боковым сторонам корпуса дрона, однако сложна в исполнении, т.к. требуется выполнить точное сверление отверстий в трубках лучей, что снижает их прочность в максимально нагруженных местах заделки консолей. Помимо этого, данная конструкция в таких подвижных узлах сопровождается люфтами сразу по двум осям, которые по мере эксплуатации при неизбежной вибрации мультироторных винтомоторных движителей будут только увеличиваться, что, в конечном итоге, затруднит точную балансировку самих движителей дрона.
Известно техническое решение складного мультикоптера (патент(CN206502009HYPERLINK"https://patents.google.com/patent/CN206502009U/en?oq=CN215205339"от 2016-06-21 г.), у которого лучи могут шарнирно поворачиваться в вертикальной плоскости для складывания их вертикально при хранении и транспортировке, а затем обратно разворачиваться с фиксированием лучей в полетном положении мультикоптера. В верхней точке поворот лучей ограничен упором фланцев стаканов, в которых закреплены трубки лучей, в ответные фланцы кронштейнов, закрепленных на корпусе. Для фиксации лучей в верхнем положении (при развертывании лучей квадрокоптера) на краях кронштейнов установлены держатели защелок, которыми зацепляют за крючки на фланцах стаканов лучей.
Такая конструкция также сложна в исполнении, т.к. состоит из множества мелких деталей требующих станочной обработки с последующей взаимной подгонкой для сборки. К тому же основные детали изготавливаются из легких, но мягких сплавов, и при соединении со стальными крепежом и осями в условиях полетных вибраций, а также рычажных и инерционных воздействий на заделку осей шарниров от подвешенных разложенных лучей с тяжелыми движителями по их концам, в легкосплавных деталях происходит расшатывание геометрии их отверстий посредством стальных деталей. В результате этого появляются и увеличиваются люфты соединений, что только усугубляется процессом эксплуатации, что также будет существенно усложнять точную балансировку движителей дрона и повысит нагрузку на систему стабилизации его автопилота, а в итоге снизит надежность. Кроме того, данная конструкция шарнирных узлов не позволит применять их для горизонтального складывания лучей по причине невозможности защелок нести изгибные и моментные нагрузки.
Известно также техническое решение для складных профессиональных мультикоптеров, производимых китайской компанией TAROT, у которых лучи с винтовыми электродвижителями могут шарнирно поворачиваться для складывания их вертикально («зонтиком») при хранении и транспортировке, а затем обратно разворачиваться с автоматическим фиксированием лучей в полетном положении мультикоптера: HYPERLINK "http://www.tarotrc.com/Product/Detail.aspx?Lang=en&Id=249670ae-cc3d-486b-b470-940a56923fe7". Там же на сайте приведены номера нескольких китайских патентных заявок (№№2014204282854, 2014203682366, 2034302624585, 2014301541104, 2014302583208), относящихся к устройствам и способам складывания и раскладывания лучей мультикоптеров, производимых компанией TAROT. Для мультикоптеров с основаниями корпусов из параллельных жестких пластин конструкция шарнирных узлов закрепления складываемых вертикально лучей выполнена в виде кронштейнов с парными параллельными ушками, скрепленными между собой распорками. На кронштейны между их ушек посредством осей шарнирно установлены зажимные стаканы с торцевыми фланцами, содержащими кулачковые вилки. В стаканы зажимом установлены внутренние концы консольных лучей мультикоптера в виде трубок, на внешних концах которых установлены электродвигатели с несущими воздушными винтами. В стенках ушек кронштейнов выполнены сквозные направляющие пазы для подвижно установленных в них подпружиненных цилиндрических фиксаторов, выполненных с возможностью автоматического вхождения в вырезные проемы с направляющими кромками кулачков вилок при раскладывании лучей с их фиксацией на корпусе мультикоптера в его полетном положении. Складывание лучей осуществляют с помощью ручной расфиксации фиксаторов, преодолевая сопротивление их пружин, путем обратного вывода фиксаторов из вырезных проемов кулачков вилок. После этого складывают луч и отпускают фиксатор для возобновления его подпружиненного упора в огибающие поверхности кулачков.
Механизмы фиксаторов выполнены с возможностью регулирования упругости пружин сжатия путем ручного подвинчивания регулировочных винтов, на которые насажены пружины сжатия.
Основным недостатком данной конструкции является конструкционное сочетание стальных силовых деталей с деталями, изготавливаемыми из легких, но мягких при смятии сплавов, обусловленное общей авиастроительной спецификой и усугубляемое именно в малогабаритных упрощенных устройствах мультикоптеров. Это приводит к тому, что в соединениях со стальными осями и крепежом, несущими основную нагрузку, вследствие неизбежных винтомоторных вибраций и полетных знакопеременных ускорений в легкосплавных деталях происходит расшатывание и деформация геометрии их отверстий посредством жестких стальных деталей. То же самое происходит и от эксплуатационных значительных рычажных и инерционных воздействий на заделку осей шарниров от подвешенных разложенных лучей с тяжелыми движителями по их концам. В результате этого появляются и неуклонно увеличиваются люфты узловых соединений, что только усугубляется процессом эксплуатации и также будет существенно усложнять критично важную точную балансировку движителей дрона. А это существенно усложняет эксплуатацию, снижает эффективность и возможности применения мультикоптеров, т.к. повышает нагрузку на систему стабилизации его автопилота, а в итоге снижает надежность всего комплекса БПЛА. При этом замена ответным к стальным деталям легкосплавных деталей на, например, композитные стеклопластиковые или углепластиковые не решит вышеописанные проблемы, т.к. эти композитные материалы также не работают на смятие в отверстиях. Таким образом устранять эти конструкционные недостатки придется исключительно заменой в процессе эксплуатации силовых узлов, что неизбежно снизит экономичность использования комплекса БПЛА. К тому же данное устройство является узкоспецифичным, т.к. обеспечивает только вертикальное складывание мультикоптеров, что также ограничивает логистические возможности в эксплуатации.
Помимо этого, для регулирования упругости пружин сжатия ручным подвинчиванием регулировочных винтов необходим доступ к тыльной части кронштейнов, которые приходится отсоединять от пластин корпуса, что очень неудобно именно в полевых условиях.
Задача изобретения
Задачей изобретения является повышение надежности, расширение возможностей и универсальности конструкций складных мультикоптеров путем увеличения виброустойчивости и износостойкости их конструкции, а также улучшение оперативности, простоты и удобства рабочего развертывания и их сложения в сохранное транспортировочное положение.
Сущность изобретения
Сущность изобретения состоит в том, что в известную конструкцию складного мультикоптера, содержащего корпус в виде основания из параллельных жестких пластин, между которыми по их выступам закреплены кронштейны с параллельными пластинам парными ушками, в которых на вертикальных к ним осях шарнирно установлены зажимные стаканы с торцевыми фланцами, содержащими кулачковые вилки, которые шарнирно установлены на оси кронштейнов между их ушками, в стенках которых выполнены сквозные направляющие пазы для подвижно установленных в них подпружиненных цилиндрических фиксаторов, на внешних концах трубок лучей установлены винтомоторные группы в виде электродвигателей с несущими воздушными винтами, причем сочленения лучей с корпусом выполнены с возможностью их складывания продольно боковым поверхностям корпуса в транспортировочном положении мультикоптера и с возможностью раскладывания лучей и их фиксацией при размещении электромоторов с винтами по углам многоугольника вокруг корпуса в полетном положении мультикоптера, кулачковые вилки содержат вырезные проемы с направляющими кромками для подпружиненного вхождения в них фиксаторов, при этом кронштейны соединяют скреплением пластины корпуса, в сложенном положении огибающие поверхности кулачков соединены подвижным контактом с фиксаторами, в положении полетного раскладывания лучей мультикоптера и их фиксации кромки проемов контактно соединены с фиксаторами, а фланцы стаканов контактно соединены с упорами кронштейнов, внесены существенные изменения, а именно: кронштейны выполнены универсальными с возможностью установки в корпусе с вариантами шарнирного складывания лучей мультикоптера соответственно в горизонтальной или вертикальной плоскостях, причем направляющие кромки вырезных проемов кулачковых вилок выполнены с угловыми скосами, при этом в положении полетного раскладывания и фиксации лучей мультикоптера кромки проемов кулачков контактно соединены с направляющими пазами ушек кронштейнов посредством подпружиненных фиксаторов с возможностью их заклинивания.
На упоры кронштейнов могут быть установлены эластичные демпферы.
Цилиндрические фиксаторы могут быть выполнены с возможностью регулирования упругости пружинения и сил прижатия фиксаторов к огибающим поверхностям кулачковых ушек и кромкам проемов вилок.
Механизм регулирования упругости пружинения и сил прижатия фиксаторов к огибающим поверхностям кулачков вилок может быть выполнен в виде регулировочного винта с резьбой на его концевой части, проходящего через направляющее отверстие по центру фиксатора и ввернутого во внутреннюю резьбу отверстия по центру распорки кронштейна. Причем на концы фиксатора могут быть установлены съемные ручки движкового типа, подвижно контактирующие с внешними гранями направляющих пазов кронштейна. А доступ регулировочной отвертки к шлицу головки винта может быть выполнен при складывании лучей мультикоптера между кулачковых вилок, при этом на участок винта между фиксатором и распоркой может быть насажена внутренним отверстием пружина сжатия, контактно соединяющая упором своих торцов фиксатор с распоркой.
Огибающие поверхности кулачков вилок могут содержать угловые впадинки, расположенные в местах, соответствующих контактному соединению цилиндрических поверхностей подпружиненных фиксаторов с огибающими поверхностями кулачков при сложенном положении лучей.
Каждая винтомоторная группа может содержать два соосных электродвигателя с двумя несущими воздушными винтами противоположного вращения.
В процессе развертывания мультикоптера в рабочее полетное положение его лучи поворачивают в горизонтальной плоскости вокруг вертикальных осей, закрепленных в ушках кронштейнов. И когда подпружиненные фиксаторы входят в вырезные проемы кулачков, они наезжают на восходящие уклоны направляющих кромок этих проемов и одновременно скользят по направляющим кромкам пазов в ушках кронштейнов. В результате этого в процессе фиксации разложенных лучей мультикоптера с помощью фиксаторов происходит заклинивание сопряженных кромок проемов кулачков с кромками пазов кронштейнов, что автоматически распирает все возможные люфты в подвижных сопряжениях предлагаемых шарнирных узлов складного мультикоптера. Таким образом по мере износа подвижно сопрягаемых деталей данным процессом заклинивания будут компенсироваться люфты, причем сама по себе вибрация в совокупности с пружинением фиксаторов будет только способствовать процессам их заклинивания в силу известного физического эффекта. При этом возможность оперативного регулирования в полевых условиях пружинения и сил прижатия фиксаторов к огибающим поверхностям кулачковых ушек и кромкам проемов вилок позволит оперативно контролировать виброустойчивость мультикоптера. В случае необходимости этому же может способствовать установка эластичных демпферов на упоры кронштейнов.
Выполнение конструктивного шарнирного сопряжения ушек кронштейнов с вилками посредством поворотных осей обеспечивает равнопрочность консольной заделки узлов навески лучей на корпус как при горизонтальном расположении осей, так и при вертикальном. Это позволяет универсальное использование предлагаемых шарнирных узлов с возможностями универсальной компоновки складных мультикоптеров повышенной грузоподъемности в аспекте и вертикального, и горизонтального шарнирного складывания их лучей.
Возможность предлагаемой универсальной компоновки конструкций складных мультикоптеров позволяет, в свою очередь, оптимизацию компоновки транспортировочных кейсов под специфические задачи гражданских и оборонных приложений применения мобильных комплексов БПЛА.
Выполнение угловых впадинок на огибающих поверхностях кулачков вилок в их местах, соответствующих контактному соединению цилиндрических поверхностей подпружиненных фиксаторов с огибающими поверхностями кулачков при сложенном положении лучей, в совокупности с возможностью оперативного регулирования пружинения фиксаторов позволит удобно фиксировать лучи и в транспортировочном положении мультикоптера, чтобы они не расшатывали шарнирные узлы от рычажно-инерционных воздействий массивных движителей.
Возможности компоновки конструкции складного мультикоптера, в котором каждая винтомоторная группа может содержать два соосных электродвигателя с двумя несущими воздушными винтами противоположного вращения в совокупности с адаптируемыми автоматически к воздействию знакопеременных консольных нагрузок и вибрации позволит увеличить потребные мощность и грузоподъемность мультикоптера без необходимости усиления прочности и жесткости шарнирных узлов лучей. Причем работа соосных воздушных винтов противоположного вращения, самостоятельно компенсирующих их аэродинамические реактивные моменты, будет также способствовать повышению виброустойчивости мультикоптера.
Таким образом, положительный эффект изобретения состоит в повышении надежности, расширении возможностей и универсальности конструкций складных мультикоптеров путем увеличения виброустойчивости и износостойкости их конструкции, а также улучшении оперативности, простоты и удобства рабочего развертывания и их сложения в сохранное транспортировочное положение.
Перечень чертежей
Графическая часть, иллюстрирующая техническую сущность изобретения, представлена следующими изображениями, где на:
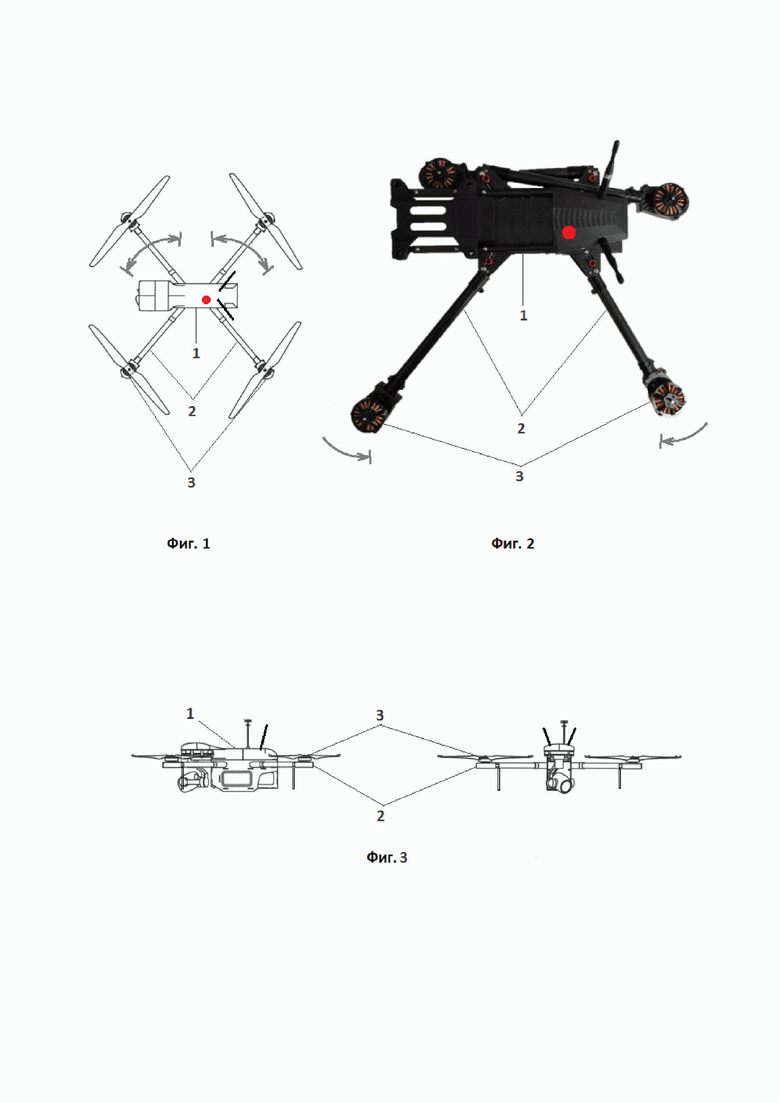
Фиг. 1 - общий вид в плане разложенного мультикоптера в его полетном положении;
Фиг. 2 - изображение реального мультикоптера с разложенными лучами на одной стороне и сложенными на другой стороне (со снятым носовым модулем полезной нагрузки);
Фиг. 3 - общий вид складного мультикоптера сбоку (слева) и спереди (справа);
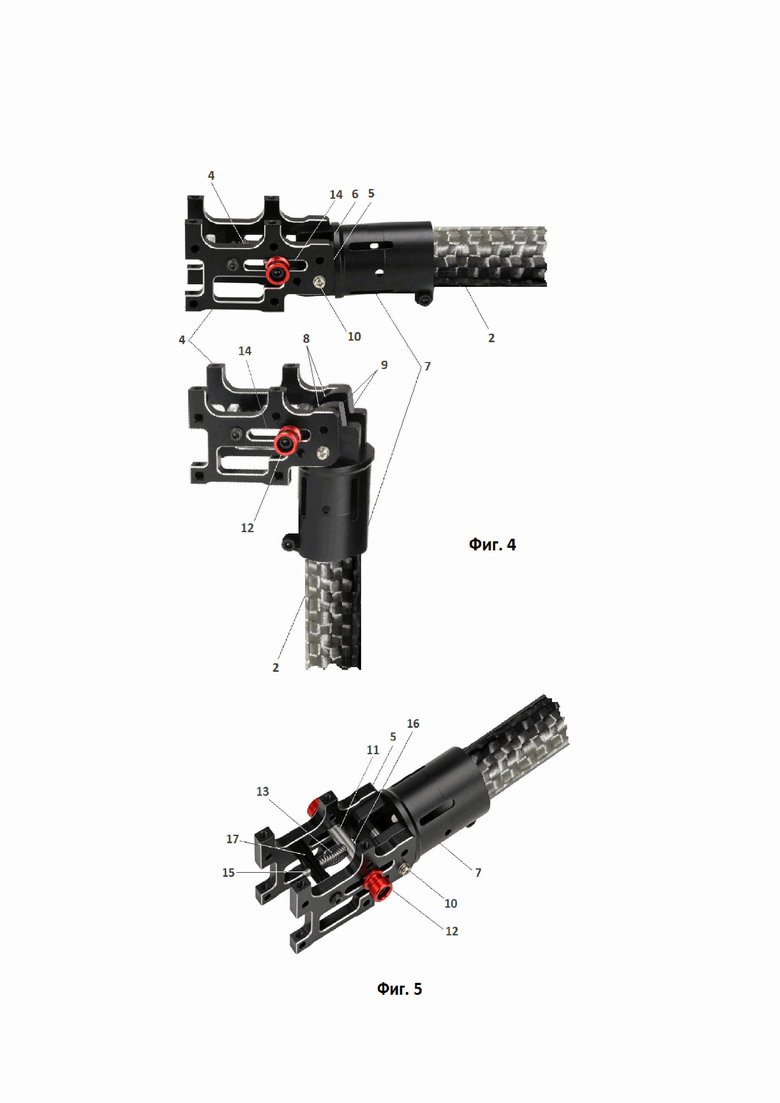
Фиг 4 - конструкция шарнирного узла складного мультикоптера в разложенном полетном положении его луча (сверху) и в сложенном положении луча (снизу);
Фиг 5 - конструкция механизма регулирования пружинения фиксатора шарнирного узла складного мультикоптера в разложенном положении его луча в варианте вертикального складывания («зонтиком»);
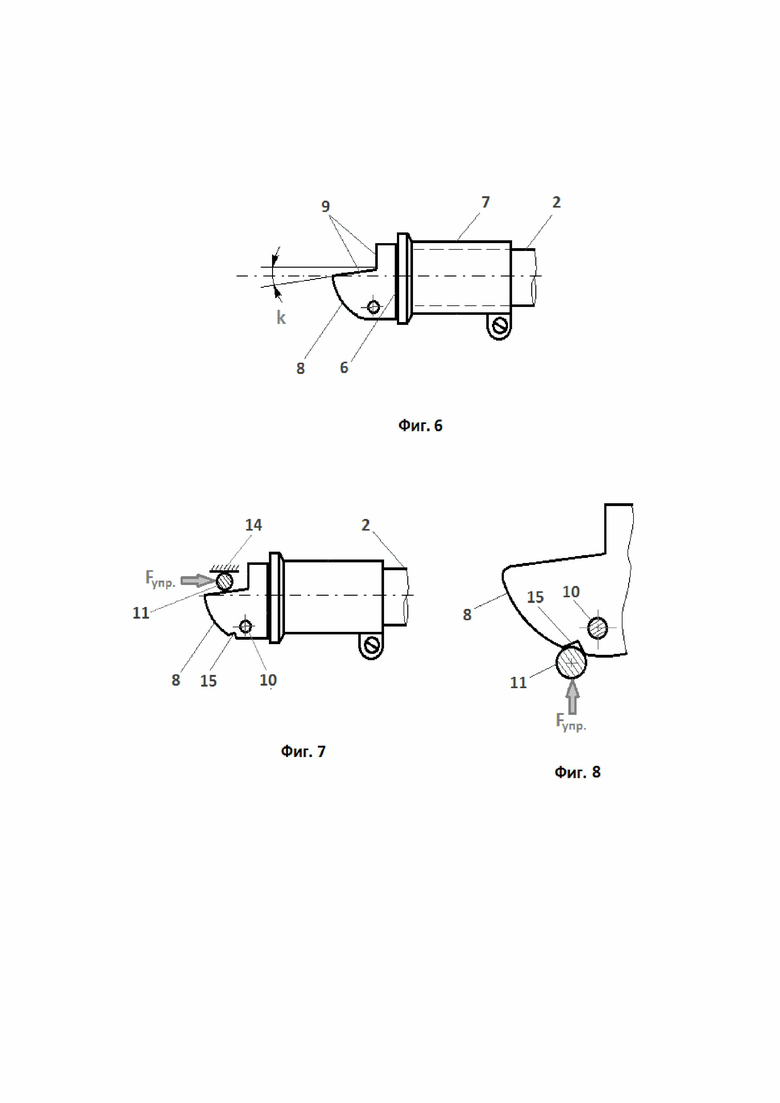
Фиг. 6 - общий вид сбоку кулачковой вилки с скошенными кромками вырезных проемов;
Фиг. 7 - схема процесса заклинивания фиксаторами во взаимодействии со скошенными кромками вырезных проемов кулачковой вилки и кромок пазов кронштейна в разложенном положении луча мультикоптера;
Фиг. 8 - схема процесса фиксации сложенных лучей с помощью фиксатора и угловой впадинки на кулачках вилок;
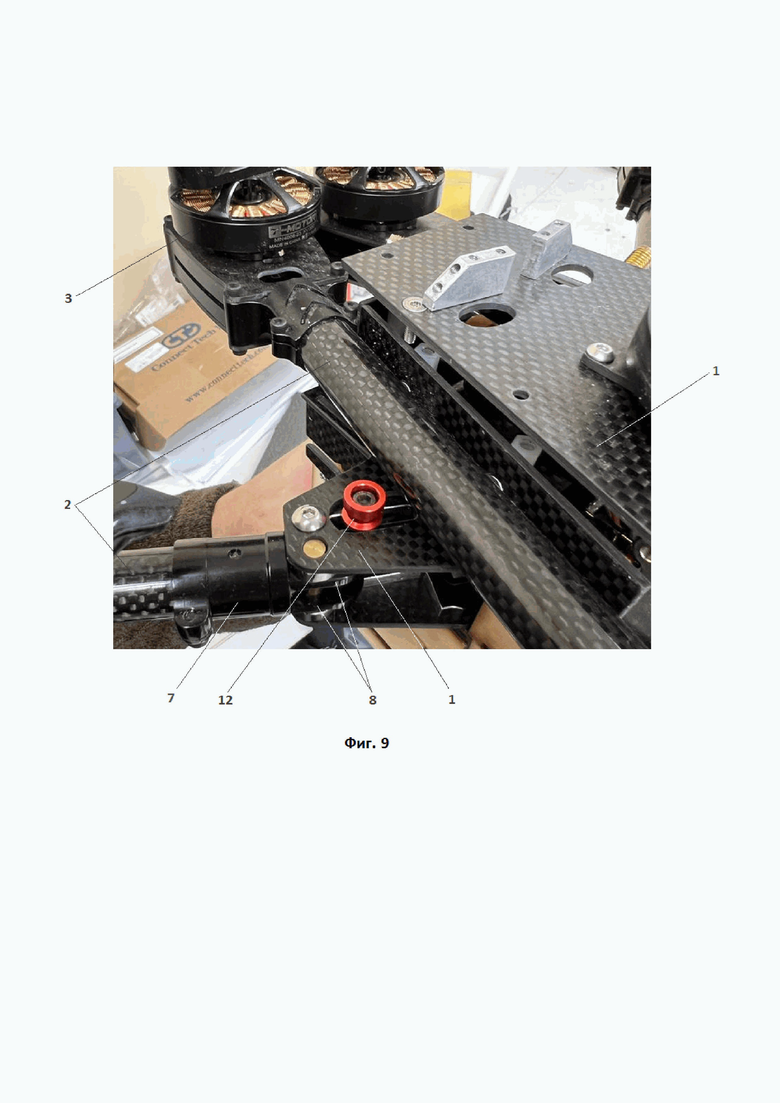
Фиг. 9 - фотоизображение реального мультикоптера с разложенным одним лучом и сложенным другим на одной и той же стороне корпуса;
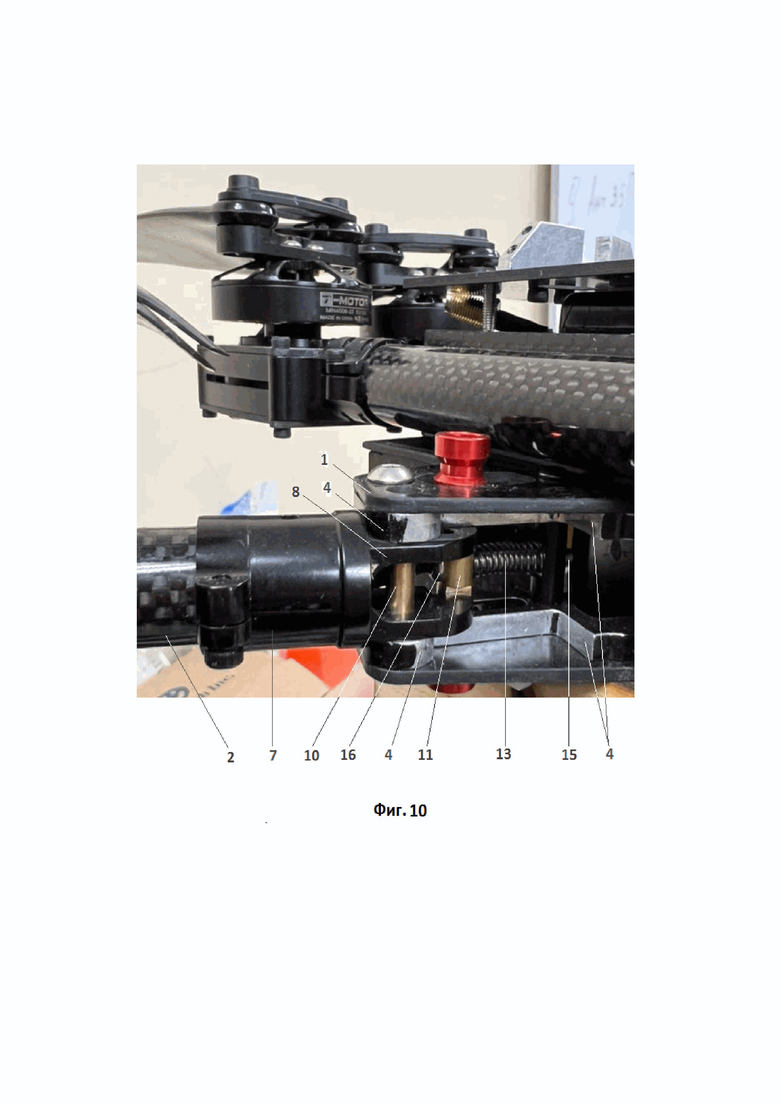
Фиг. 10 - изображение реального складного мультикоптера на фото, иллюстрирующем закрепление шарнирных узлов лучей в корпусе и механизм регулирования пружинения их фиксатора.
На представленных фигурах приняты следующие обозначения:
1 - корпус складного мультикоптера, включающий пластины основания;
2 - трубчатые лучи;
3 - винтомоторные группы в виде электродвигателей с несущими воздушными винтами (несущие движители);
4 - ушки кронштейнов;
5 - упоры кронштейнов;
6 - фланцы зажимных стаканов;
7 - зажимные стаканы;
8 - кулачки вилок;
9 - вырезные проемы со скошенными кромками кулачков вилок;
10 - оси шарнирной установки вилок на ушки кронштейнов;
11 - цилиндрические фиксаторы;
12 - ручки фиксаторов;
13 - пружина сжатия фиксатора;
14 - сквозные направляющие пазы в ушках кронштейнов;
15 - регулировочный винт фиксатора;
16 - головка с отверточным шлицем регулировочного винта фиксатора;
17 - распорка, скрепляющая ушки кронштейна и содержащая резьбовое отверстие для регулировочного винта.
Описание работы устройства
Складной мультикоптер содержит корпус 1, на котором шарнирно установлены консольные лучи 2 с концевыми винтомоторными группами 3 в виде электродвигателей с несущими воздушными винтами (см. фиг. 1, 2 и 3). Корпус 1 включает параллельные жесткие пластины основания, между которыми по их выступам закреплены кронштейны с параллельными пластинам парными ушками 4, в которых на вертикальных к ним осях 10 шарнирно установлены зажимные стаканы 7 с торцевыми фланцами 6 (см. фиг. 4, 5, 9 и 10). В стаканах 7 путем зажима установлены внутренние концы трубок лучей 2. При этом шарнирные сочленения с корпусом 1 лучей 2 выполнены с возможностью их складывания продольно боковым поверхностям корпуса в транспортировочном положении мультикоптера и с возможностью раскладывания лучей и их фиксацией при размещении электромоторов с винтами по углам многоугольника вокруг корпуса в полетном положении мультикоптера (см. фиг. 1, 2 и 3). Ушки 4 кронштейнов соединены между собой скреплением посредством распорок 17 (см. фиг. 5), при этом сами собранные кронштейны соединяют скреплением пластины корпуса 1 (см. фиг. 9 и 10). Фланцы 6 содержат кулачковые вилки 8, которые шарнирно установлены на оси 10 кронштейнов между их ушками 4, в стенках которых выполнены сквозные направляющие пазы 14 для подвижно установленных в них подпружиненных цилиндрических фиксаторов 11 (см. фиг. 4, 5, 9 и 10). Кулачковые вилки 8 содержат вырезные проемы 9 с направляющими кромками для подпружиненного вхождения в них фиксаторов 11. В сложенном положении лучей 2 мультикоптера огибающие поверхности кулачков 8 соединены подвижным контактом с фиксаторами 11, а в положении полетного раскладывания лучей и их фиксации кромки проемов 9 контактно соединены с фиксаторами 11, а фланцы стаканов 6 контактно соединены с упорами 5 кронштейнов (см. фиг. 4, 5 и 10).
Кронштейны выполнены универсальными с возможностью установки в корпусе с вариантами шарнирного складывания лучей мультикоптера соответственно в горизонтальной (см. фиг. 1, 2, 3, 9 и 10) или вертикальной плоскостях («зонтиком», см. фиг. 4 и 5). Направляющие кромки вырезных проемов 9 кулачковых вилок выполнены с угловыми скосами k наружу (см. фиг. 4 и 6), при этом в положении полетного раскладывания и фиксации лучей 2 мультикоптера кромки проемов 9 кулачков контактно соединены с направляющими кромками пазов 14 ушек кронштейнов посредством подпружиненных фиксаторов 11 с возможностью их заклинивания под действием упругой силы Fупр. пружины сжатия 13 (см. фиг. 7).
В сложенном состоянии, например, квадрокоптера его лучи 2 поворотом вокруг осей 10 в горизонтальной плоскости располагают прилеганием попарно вдоль смежных лучей боковых сторон корпуса 1 дрона (см. фиг. 2, 9 и 10). Для раскладывания квадрокоптера его лучи поворачивают в обратных складыванию направлениях наружу от смежных сторон корпуса (направления поворота лучей на фиг. 1 и 2 указаны стрелками) до упирания фланцев стаканов 7 в упоры 5 ушек 4 кронштейнов. При этом фиксаторы 11 разжиманием своих пружин 13 автоматически проникают в проемы 9 кулачков вилок и заклинивают направляющие кромки пазов 14 ушек и самих проемов 9, зафиксировав таким образом полетное положение лучей квадрокоптера, причем с визуальным контролированием определенного для этого положения движков ручек 12 в направляющих пазах. А для обратного складывания квадрокоптера в транспортировочное положение синхронно сдвигают сразу обе ручки 12 до выхода фиксатора 11 из проема 9 и поворачивают каждый луч 2 в сторону складывания, одновременно отпуская ручки фиксатора, при этом производят расфиксацию шарнирного узла. Затем поворотом луча 2 до прощелкивания подпружиненного фиксатора 11 при попадании его в угловые впадинки 15 кулачков производят частичную фиксацию каждого луча для сохранного транспортировочного положения мультикоптера (см. фиг. 7 и 8).
При необходимости оперативного регулирования пружинения фиксаторов, например, в полевых условиях с помощью ручек 12 выводят фиксатор 11 из проема 9 и слегка поворачивают луч 2 в противоположном складыванию направлении, открывая тем самым доступ для отвертки к шлицу головки 16 регулировочного винта 15 при освобождении ручек 12 (см. фиг. 4 и 10). После регулировки пружинения снова отодвигают ручками фиксатор и поворачивают луч обратным порядком в полетное положение с фиксацией подпружиненным фиксатором (см. фиг. 4, 5, 9 и 10).
При компоновке мультикоптера со складыванием лучей вертикально («зонтиком») производятся те же самые манипуляции с шарнирными узлами лучей (см. фиг. 4 и 5), внутренние концы которых, например, зажимают в стаканах 7 после их проворота на 90 градусов, или же, например, проворачивают аналогично также зажимное закрепление движителей 3 на внешних концах лучей.
Комплексы БПЛА со складными мультикоптерами перевозят обычно в штатных транспортировочных кейсах (чемоданах), в которых размещены сам сложенный мультикоптер и остальное оборудование комплекса с ЗИП. Возможность предлагаемой универсальной компоновки конструкций складных мультикоптеров позволяет, в свою очередь, оптимизацию компоновки транспортировочных кейсов под специфические задачи гражданских и оборонных приложений применения мобильных комплексов БПЛА.
Промышленная применимость
Все детали конструкции предлагаемого складного мультикоптера, например, в виде квадрокоптера (см. фиг. 1, 2, 5 и 6) изготовлены из хорошо известных и доступных материалов. Предусмотренное изобретением взаимодействие средств реализуется в известных технологических процессах в области авиастроения и использования пилотируемых и беспилотных летательных аппаратов различного назначения. Предлагаемое изобретение предназначено для использования в мультикоптерах самого различного назначения. Квадрокоптер, реализующий заявляемое изобретение, был разработан и произведен для серийного выпуска и в процессе разработки неоднократно экспериментально проверен в опытных партиях продукции предприятия-заявителя. Таким образом комплексными испытаниями подтверждено выполнение поставленных задач и достижение намеченной эффективности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР | 2023 |
|
RU2812825C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Самоходная транспортировочная тележка | 2023 |
|
RU2822028C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| УСТРОЙСТВО ДЛЯ СОВМЕСТНОГО ВЫТЯГИВАНИЯ ДОННЫХ ПАНЕЛЕЙ ТРАНСПОРТИРОВОЧНОГО СРЕДСТВА В МАШИНЕ ДЛЯ ЗАГРУЗКИ ТРАНСПОРТИРОВОЧНЫХ СРЕДСТВ | 1996 |
|
RU2179943C2 |
| Тележка складная для транспортировки в багажнике автомобиля | 2017 |
|
RU2647824C1 |
Изобретение относится к беспилотным летательным аппаратам (БПЛА). Складной мультикоптер содержит корпус из параллельных жестких пластин основания, между которыми закреплены кронштейны с параллельными пластинам парными ушками, в которых шарнирно установлены зажимные стаканы с торцевыми фланцами, содержащими кулачковые вилки, которые шарнирно установлены на оси кронштейнов между их ушками. В стенках кронштейнов выполнены сквозные направляющие пазы для подвижно установленных в них подпружиненных фиксаторов. Кулачковые вилки содержат вырезные проемы с направляющими кромками для подпружиненного вхождения в них фиксаторов. Кронштейны выполнены универсальными с возможностью установки в корпусе с вариантами шарнирного складывания лучей мультикоптера в горизонтальной или вертикальной плоскостях. Направляющие кромки вырезных проемов кулачковых вилок выполнены с угловыми скосами. При этом в полетном положении кромки проемов кулачков контактно соединены с направляющими пазами кронштейнов посредством подпружиненных фиксаторов с возможностью их заклинивания. Достигается повышение надежности конструкции, расширение возможностей и универсальности. 5 з.п. ф-лы, 10 ил.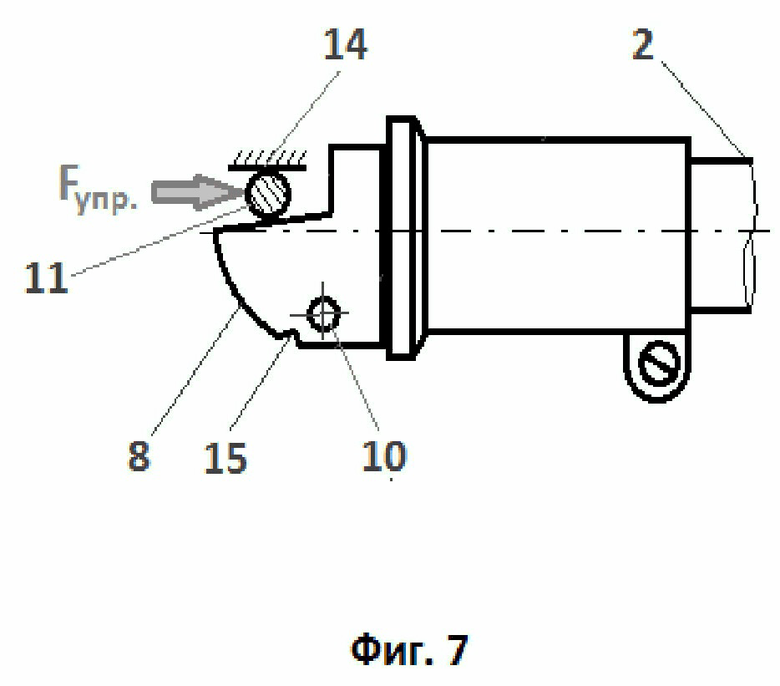
1. Складной мультикоптер, содержащий корпус, включающий параллельные жесткие пластины основания, между которыми по их выступам закреплены кронштейны с параллельными пластинам парными ушками, в которых на вертикальных к ним осях шарнирно установлены зажимные стаканы с торцевыми фланцами, содержащими кулачковые вилки, которые шарнирно установлены на оси кронштейнов между их ушками, в стенках которых выполнены сквозные направляющие пазы для подвижно установленных в них подпружиненных цилиндрических фиксаторов, на внешних концах трубок лучей установлены винтомоторные группы в виде электродвигателей с несущими воздушными винтами, причем сочленения лучей с корпусом выполнены с возможностью их складывания продольно боковым поверхностям корпуса в транспортировочном положении мультикоптера и с возможностью раскладывания лучей и их фиксацией при размещении электромоторов с винтами по углам многоугольника вокруг корпуса в полетном положении мультикоптера, кулачковые вилки содержат вырезные проемы с направляющими кромками для подпружиненного вхождения в них фиксаторов, при этом кронштейны соединяют скреплением пластины корпуса, в сложенном положении огибающие поверхности кулачков соединены подвижным контактом с фиксаторами, в положении полетного раскладывания лучей мультикоптера и их фиксации кромки проемов контактно соединены с фиксаторами, а фланцы стаканов контактно соединены с упорами кронштейнов, отличающийся тем, что кронштейны выполнены универсальными с возможностью установки в корпусе с вариантами шарнирного складывания лучей мультикоптера соответственно в горизонтальной или вертикальной плоскостях, причем направляющие кромки вырезных проемов кулачковых вилок выполнены с угловыми скосами, при этом в положении полетного раскладывания и фиксации лучей мультикоптера кромки проемов кулачков контактно соединены с направляющими пазами кронштейнов посредством подпружиненных фиксаторов с возможностью их заклинивания.
2. Складной мультикоптер по п.1, отличающийся тем, что на упоры кронштейнов установлены эластичные демпферы.
3. Складной мультикоптер по п.1, отличающийся тем, что цилиндрические фиксаторы выполнены с возможностью регулирования упругости пружинения и сил прижатия фиксаторов к огибающим поверхностям кулачковых ушек и кромкам проемов вилок.
4. Складной мультикоптер по п.3, отличающийся тем, что механизм регулирования упругости пружинения и сил прижатия фиксаторов к огибающим поверхностям кулачков вилок выполнен в виде регулировочного винта с резьбой на его концевой части, проходящего через направляющее отверстие по центру фиксатора и ввернутого во внутреннюю резьбу отверстия по центру распорки кронштейна, причем на концы фиксатора установлены съемные ручки движкового типа, подвижно контактирующие с внешними гранями направляющих пазов кронштейна, доступ регулировочной отвертки к шлицу головки винта выполнен при складывании лучей мультикоптера между кулачковых вилок, при этом на участок винта между фиксатором и распоркой насажена внутренним отверстием пружина сжатия, контактно соединяющая упором своих торцов фиксатор с распоркой.
5. Складной мультикоптер по пп.1-4, отличающийся тем, что огибающие поверхности кулачков вилок содержат угловые впадинки, расположенные в местах, соответствующих контактному соединению цилиндрических поверхностей подпружиненных фиксаторов с огибающими поверхностями кулачков при сложенном положении лучей.
6. Складной мультикоптер по п.1, отличающийся тем, что каждая винтомоторная группа содержит два соосных электродвигателя с двумя несущими воздушными винтами противоположного вращения.
| CN 205273839 U, 01.06.2016 | |||
| CN 205633049 U, 12.10.2016 | |||
| CN 207045680 U, 27.02.2018 | |||
| 0 |
|
SU188461A1 | |
| СКЛАДНОЙ КВАДРОКОПТЕР | 2017 |
|
RU2665123C2 |

