Изобретение относится к области машиностроения, в частности к дифференциальным винтовым механизмам точных перемещений для прижимных устройств.
Из области машиностроения известны винтовые механизмы преобразования вращательного движения во вращательно-поступательное, содержащие корпус, размещенный в нем рабочий вал в виде винта с резьбовыми участками, (патент RU №838200, МПК F16H 25/20, 15.06.1981).
Данный известный механизм не может быть использован как прижимное устройство, т.к. при наличии осевых усилий винт будет самоустанавливаться по общей оси гаек, что исключит возможность изменения передаточного числа механизма.
Из уровня техники известно дифференциальное отсчетное устройство, содержащее корпус со шкалой, полый винт, взаимодействующий наружной резьбой с корпусом, а внутренней резьбой с дифференциальным винтом, а также каретку, установленную на дифференциальном винте (патент RU 2025622, МПК F16H 25/20, 30.12.1994).
Данное устройство не может быть использовано как прижимное устройство, т.к. силовое давление каретки зависит от сил трения в резьбовом соединении дифференциального и полого винтов.
Известен дифференциальный винтовой пресс для прижимных устройств, содержащий станину, наружный винт и ввинчиваемый в него с меньшим шагом резьбы внутренний винт, а также прижимную плиту и муфту, состоящую из двух полумуфт (патент RU №190748, МПК F16H 25/20, 20.11.1967). - прототип.
Недостатком конструкции данного механизма является его низкая надежность, т.к. изменение режима работы основано на силах трения, которые по мере эксплуатации изменяются, в том числе в силу загрязнения трущихся поверхностей и качества их смазки. Так, например, при загрязнении резьбового соединения внутреннего винта, при обратном ходе последний может оказаться заклиненным и будет вращаться вместе с наружным винтом, проскальзывая по конусной поверхности. В таком случае не обеспечивается возвращение внутреннего винта в исходное положение. Подвижная и прижимная плиты не смогут разойтись до их начального состояния, и при вторичном прижиме обрабатываемого изделия рабочий ход не будет осуществлен.
Задачей предложенного механизма является обеспечение относительно высокой скорости перемещения прижимной плиты до упора в обрабатываемое изделие в холостом режиме работы при вращении внутреннего винта и неподвижном наружном винте, и обеспечение высокой нагрузки при вращении наружного винта и неподвижном внутреннем винте при микроскопических поступательных перемещениях прижимной плиты, равной разности шагов резьб.
Техническим результатом при использовании изобретения является повышение надежности пресса за счет принудительного переключения механизма изменения режима работы, не зависящего от сил трения в резьбовых соединениях.
Указанный технический результат достигается тем, что в дифференциальном винтовом прессе, содержащем станину, наружный винт и ввинчиваемый в него внутренний винт с меньшим шагом резьбы, а также прижимную плиту и муфту, состоящую из двух полумуфт, согласно изобретению муфта размещена внутри станины, соединена с винтами посредством шпонок и установлена с возможностью скольжения по силовым резьбам винтов до крайних положений, при этом пресс оснащен эксцентриковым ручным приводом перемещений муфты, размещенным в станине, а полумуфты имеют независимое вращение за счет неразъемного шарикового соединения между собой, причем первая полумуфта установлена с возможностью взаимодействия с наружным винтом и станиной, а вторая полумуфта установлена с возможностью взаимодействия с внутренним винтом и станиной с чередованием замыкания свободного вращения наружного и внутреннего винтов посредством шпоночных соединений со станиной.
Кроме того, указанный технический результат достигается тем, что внутренний и наружный винты имеют независимые ручные приводы.
Изобретение иллюстрируется чертежами.
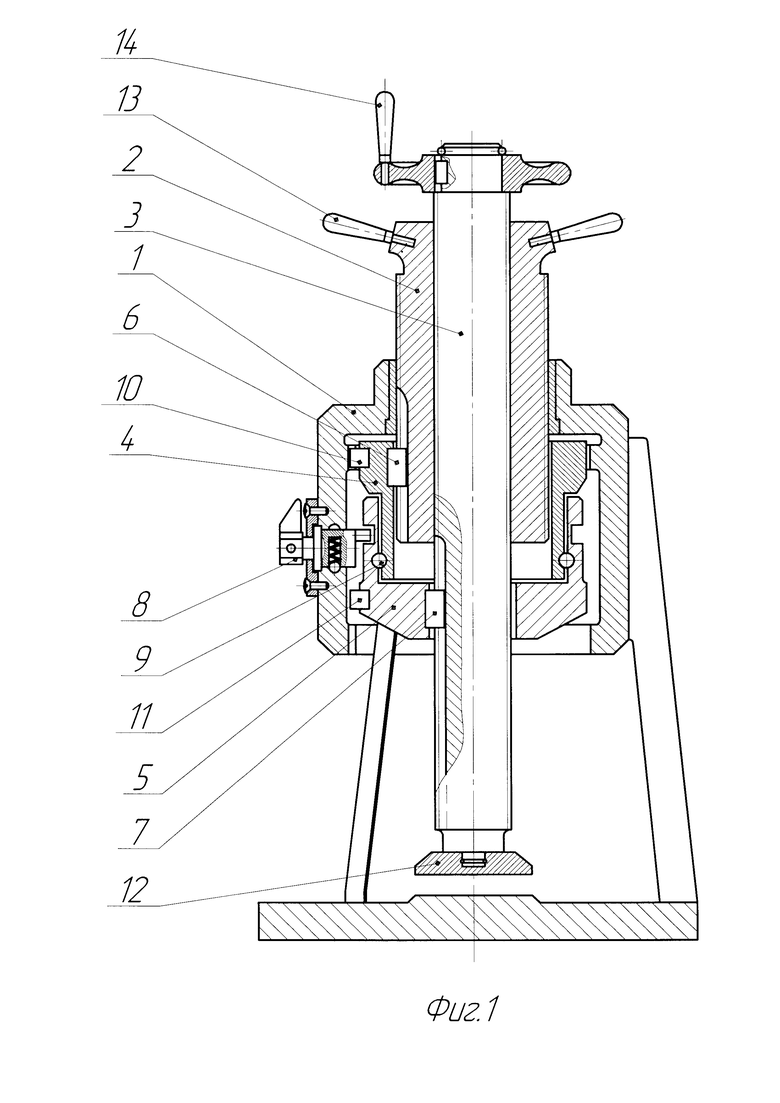
На фиг. 1 изображен продольный разрез дифференциального винтового пресса при холостом режиме работы;
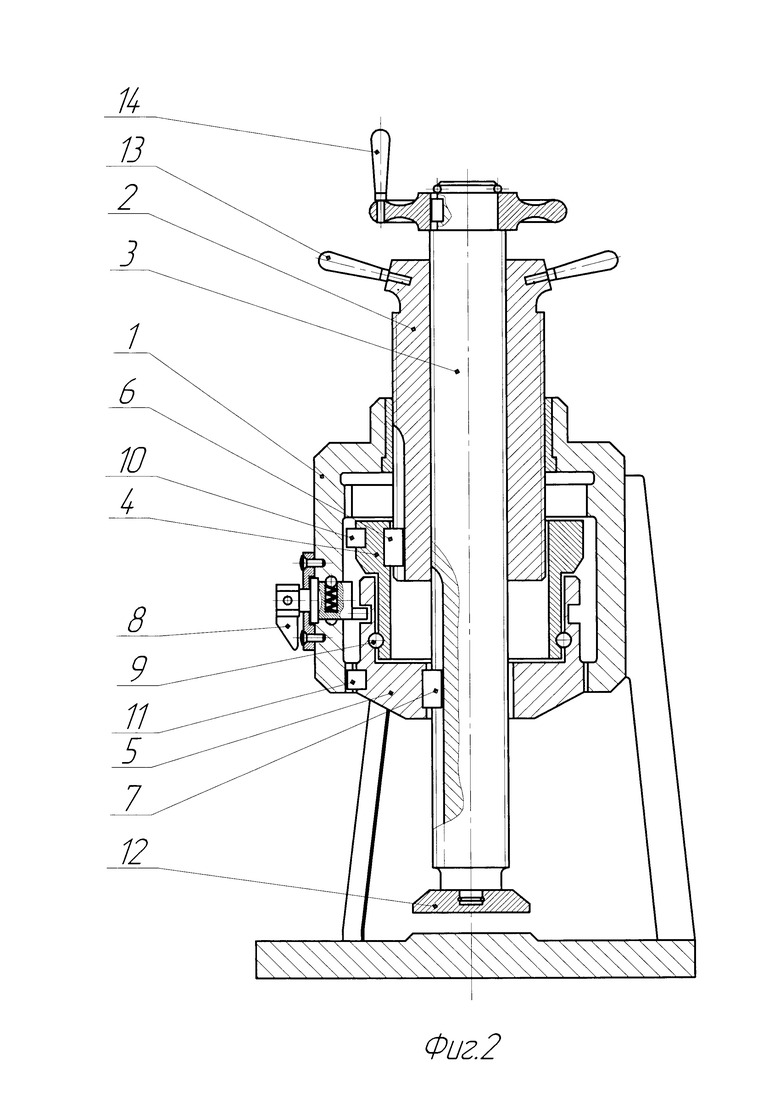
на фиг. 2 изображен продольный разрез дифференциального винтового пресса в рабочем режиме.
Дифференциальный винтовой пресс (фиг. 1, 2) содержит станину 1, в которой установлен взаимодействующий с ней наружный винт 2.. В наружный винт 2 ввинчен внутренний винт 3, имеющий шаг резьбы, меньший, чем шаг резьбы наружного винта 2.
В станине 1 размещена подвижная муфта, состоящая из двух полумуфт: первой 4 и второй 5. Муфта, а, следовательно, ее полумуфты 4 и 5 соединены с винтами 2 и 3 посредством шпонок 6 и 7. При этом муфта установлена с возможностью скольжения по силовым резьбам винтов 2 и 3 до крайних положений. Перемещения муфты в крайние положения, а именно при холостом ходе и в рабочем режиме, осуществляют посредством эксцентрикового ручного привода 8 с рукояткой переключения, который размещен в станине 1. Полумуфты 4,5 имеют независимое вращение за счет неразъемного шарикового соединения 9. Первая полумуфта 4 своей внутренней поверхностью взаимодействует с наружным винтом 2 посредством шпонки 6, а своей наружной поверхностью взаимодействует со станиной 1 посредством шпонки 10. Вторая полу муфта 5 своей внутренней поверхностью взаимодействует с внутренним винтом 3 посредством шпонки 7, и своей наружной поверхностью взаимодействует со станиной 1 посредством шпонки 11. Такое взаимодействие полумуфт 4 и 5 с винтами 2 и 3 и со станиной 1 позволяет поочередно замыкать, т.е. останавливать, свободное вращение наружного или внутреннего винтов 2,3. При этом поступательное движение внутреннего винта 3 в любом случае остается свободным.
На нижнем конце внутреннего винта 3 смонтирована прижимная плита 12.
Наружный винт 2 и внутренний винт 3 и имеют независимые ручные приводы 13, 14, соответственно.
Дифференциальный винтовой пресс работает следующим образом.
При холостом ходе (фиг. 1) полумуфта 4 находится в крайнем верхнем положении, при этом она своей наружной поверхностью совмещена посредством шпоночного соединения 10 с внутренней поверхностью станины 1. При этом любое перемещение наружного винта 2 замкнуто, т.е. остановлено. В этом положении размыкается шпоночное соединение 11 второй полумуфты 5 со станиной 1, и внутренний винт 3 в движениях не ограничен. Вращением внутреннего винта 3 опускается прижимная плита 12 до упора в изделие. При вращении внутреннего винта 3 свободно вращается вторая полумуфта 5 за счет шарикового соединения 9, а первая полумуфта 4 остается неподвижной.
Для осуществления рабочего хода необходимо повернуть на 180 0 рукоятку переключения эксцентрикового ручного привода 8 (фиг. 2).
Первая и вторая полумуфты 4 и 5 при этом перемещаются в крайнее нижнее положение. Вторая полу муфта 5 входит в шпоночное соединение 11 с внутренней поверхностью станины 1, а первая полумуфта 4 выходит из шпоночного соединения 10 со станиной 1. При этом вращательное движение внутреннего винта 3 замкнуто т.е. остановлено, а наружный винт 2 имеет две степени свободы. При вращении наружного винта 2 не вращается внутренний винт 3, так как это движение замкнуто шпоночными соединениями 7 и 11 второй полумуфты 5. В то же время внутренний винт 3 перемещается вниз на величину разности резьбовых шагов наружной и внутренней резьбы наружного винта 2. При этом осуществляется рабочая вертикальная подача прижимной плиты 12.
Вращение наружного винта 2 осуществляют рукоятками ручного привода 13, а вращение внутреннего винта 3 осуществляют посредством рукоятки ручного привода 14.
При переключениях режимов работы пресса, в процессе поворота рукоятки эксцентрикового привода 8 одновременно поворачивается свободный винт до совмещения шпонки муфты со шпоночным пазом в станине 1, после чего рукоятка привода 8 поворачивается далее до своего конечного положения на 180° от первоначального.
Заявленный винтовой пресс обеспечивает в одном холостом режиме работы, при вращении внутреннего винта 3 и неподвижном наружном винте 2, относительно высокую скорость перемещения прижимной плиты 12 до упора в изделие, а в рабочем режиме обеспечивает высокую нагрузку на изделие при микроскопических поступательных перемещениях прижимной плиты 12.
Заявленное изобретение может быть использовано, например, для сжатия углеродной активированной ткани при измерении ее электрической емкости с контролем усилия сжатия пленочными датчиками нагрузки, когда при больших нагрузках необходимы микроскопические перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1967 |
|
SU190748A1 |
| ПРОФИЛЕГИБОЧНЫЙ СТАН | 2004 |
|
RU2276627C1 |
| Устройство для цементирования хвостовика в скважине и способ его применения | 2024 |
|
RU2838706C1 |
| ПУСКОВОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU6352A1 |
| ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 2001 |
|
RU2197391C1 |
| Винтовой механизм | 1976 |
|
SU656959A1 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| ПОРТАТИВНЫЙ ТЕСТЕР ТВЕРДОСТИ С ЦИФРОВЫМ ДИСПЛЕЕМ | 2013 |
|
RU2601512C2 |
| ШАРНИР ЗАБОЙНОГО ДВИГАТЕЛЯ | 2001 |
|
RU2206697C1 |
Изобретение относится к области машиностроения, а более конкретно к прессовому оборудованию. Дифференциальный винтовой пресс содержит станину (1), наружный винт (2) и ввинчиваемый в него внутренний винт (3) с меньшим шагом резьбы. Внутри станины (1) размещена муфта, состоящая из двух взаимодействующих полумуфт (4, 5). Муфта соединена с винтами (2, 3) посредством шпонок (6, 7) и установлена с возможностью скольжения по силовым резьбам винтов до крайних положений. Пресс оснащен эксцентриковым ручным приводом (8) перемещений муфты, размещенным в станине (1). Первая полумуфта (4) установлена с возможностью взаимодействия с наружным винтом (2) и станиной (1). Вторая полумуфта (5) установлена с возможностью взаимодействия с внутренним винтом (3) и станиной (1). Ha нижнем конце внутреннего винта (3) смонтирована прижимная плита (12). Внутренний винт (3) и наружный винт (2) имеют независимые ручные приводы (13, 14). Достигается повышение надежности. 1 з.п. ф-лы, 2 ил.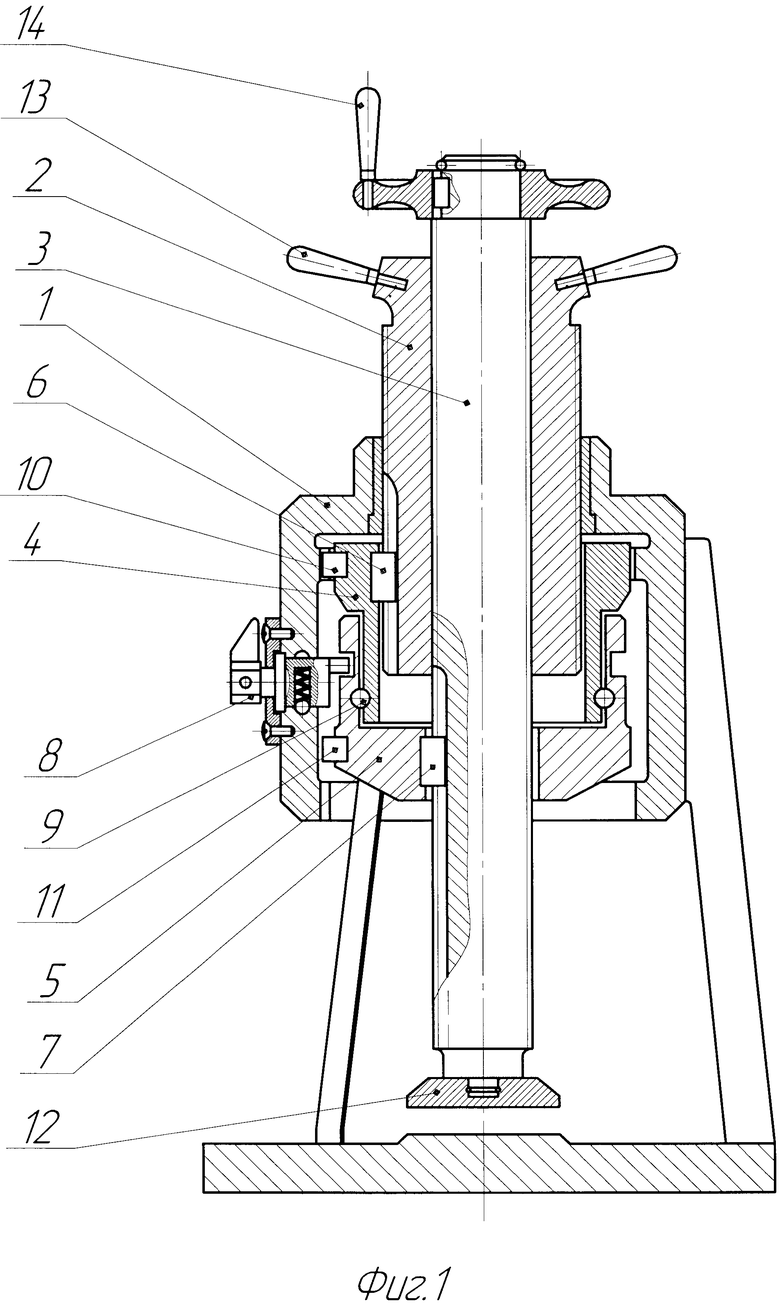
1. Дифференциальный винтовой пресс, содержащий станину, наружный винт и ввинчиваемый в него внутренний винт с меньшим шагом резьбы, а также прижимную плиту и муфту, состоящую из двух взаимодействующих полумуфт, отличающийся тем, что муфта размещена внутри станины, соединена с винтами посредством шпонок и установлена с возможностью скольжения по силовым резьбам винтов до крайних положений, при этом пресс оснащен эксцентриковым ручным приводом перемещений муфты, размещенным в станине, а полумуфты имеют независимое вращение за счет неразъемного шарикового соединения между собой, причем первая полумуфта установлена с возможностью взаимодействия с наружным винтом и станиной, а вторая полумуфта установлена с возможностью взаимодействия с внутренним винтом и станиной с чередованием замыкания свободного вращения наружного и внутреннего винтов посредством шпоночных соединений со станиной.
2. Пресс по п. 1, отличающийся тем, что внутренний и наружный винты имеют независимые ручные приводы.
| Винтовой пресс двойного действия | 1985 |
|
SU1258705A1 |
| НЕГАТИВНАЯ РАМКА ФОТОУВЕЛИЧИТЕЛЯ | 1993 |
|
RU2119682C1 |
| Дифференциальный винтовой механизм | 1986 |
|
SU1397657A1 |
| Механизм для точных поступательных перемещений | 1981 |
|
SU973983A1 |

