Изобретение относится к измерительной технике и может применяться в вибрационных кориолисовых гироскопических датчиках угловой скорости.
Известен способ [1] управления, заключающийся в возбуждении автоколебаний первой моды со стабилизацией амплитуды скорости колебаний, причем фаза возбуждающей силы соответствует фазе скорости колебаний в первой моде, колебания второй (ортогональной) моды подавляются, а выходной сигнал формируют так, чтобы он был пропорционален амплитуде силы, прикладываемой для подавления колебаний второй (ортогональной) моды. Эта сила равна по величине кориолисовой силе, поэтому пропорциональна измеряемой угловой скорости.
Недостаток данного способа заключается в том, что гироскопические датчики угловой скорости, в которых он реализован, имеют низкую точность. Погрешности таких датчиков имеют следующие основные составляющие:
- квадратичная нелинейность преобразования;
- температурная зависимость смещения нуля, вызванная температурной зависимостью погрешностей, возникающих при усилении и фазочувствительном детектировании сигнала, пропорционального скорости колебаний второй (ортогональной) моды, т.к. эта скорость имеет очень низкий уровень из-за подавления колебаний.
Известен способ [2] управления, заключающийся в возбуждении автоколебаний первой моды со стабилизацией амплитуды скорости колебаний и одновременным возбуждением автоколебания второй (ортогональной) моды со стабилизацией амплитуды скорости, причем фаза возбуждающих сил при линейных колебаниях или моментах при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируют так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов.
Недостатки известного способа, обусловленные стабилизацией амплитуды скорости, проявляются при разночастотности, т.е. когда резонансная частота ƒ1 первой моды отличается от резонансной частоты ƒ2 второй (ортогональной) моды.
Скорость колебаний в моде, имеющей меньшую резонансную частоту, будет отставать по фазе от возбуждающей силы, а в моде с большей резонансной частотой - опережать. То есть, кроме составляющей, совпадающей по фазе с возбуждающей силой, появляются составляющие, смещенные на минус 90° и на +90°, амплитуды которых зависят от величины разночастотности Δƒ=ƒ1-ƒ2.
При стабилизации амплитуды скорости это приводит к смещению нуля и изменению коэффициента преобразования. Стабилизация амплитуды составляющей скорости колебаний, совпадающей по фазе с возбуждающей силой, устраняет этот недостаток.
Технический результат заключается в повышении точности кориолисова гироскопического датчика угловой скорости.
Задачей, на решение которой направлено настоящее изобретение, является стабилизация амплитуды составляющей скорости колебаний, совпадающей по фазе с возбуждающей силой.
Эта задача решается за счет того, что в способе управления чувствительным элементом и формирования выходного сигнала вибрационного кориолисова гироскопического датчика угловой скорости, заключающемся в одновременном возбуждении автоколебаний первой и второй (ортогональной) мод, причем фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируется так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов, согласно изобретению стабилизируют амплитуду составляющей скорости колебаний, которую выделяют путем фазочувствительного выпрямления с использованием фазы сигнала, пропорционального сумме скоростей колебаний в первой и во второй (ортогональной) моде.
Отличительным признаком заявленного способа является стабилизация амплитуды составляющей скорости колебаний, выделяемой путем фазочувствительного выпрямления с использованием фазы сигнала, пропорционального сумме колебаний в первой и второй (ортогональной) моде.
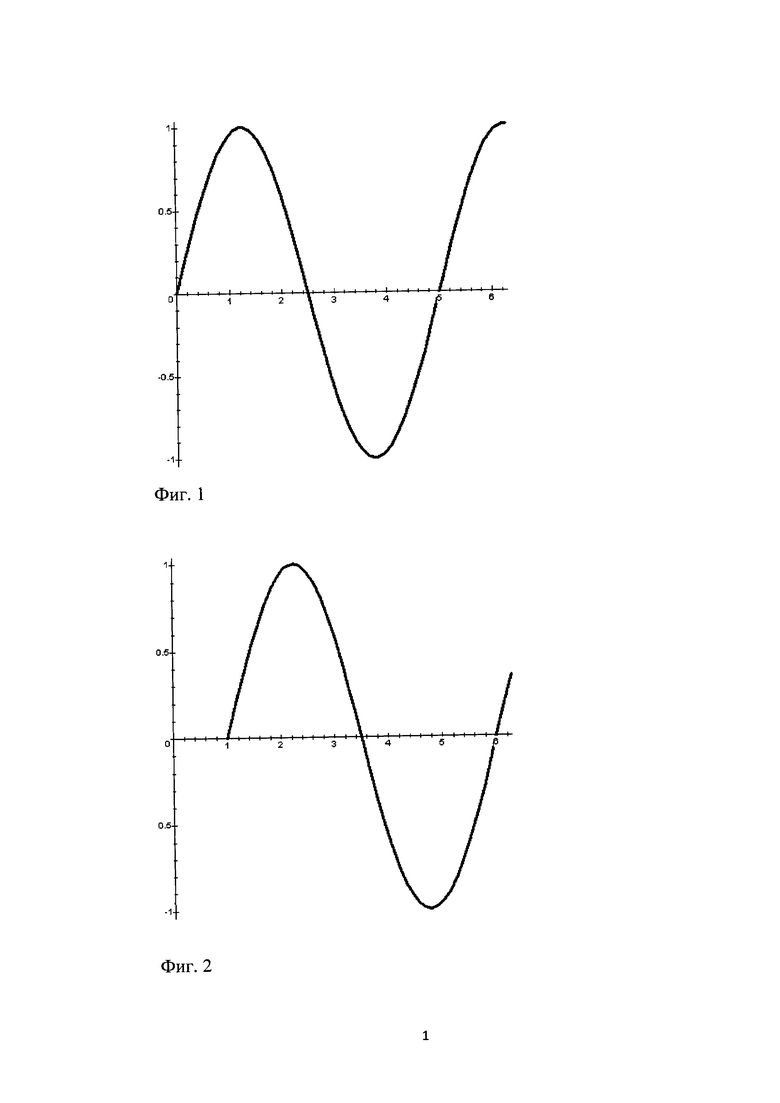
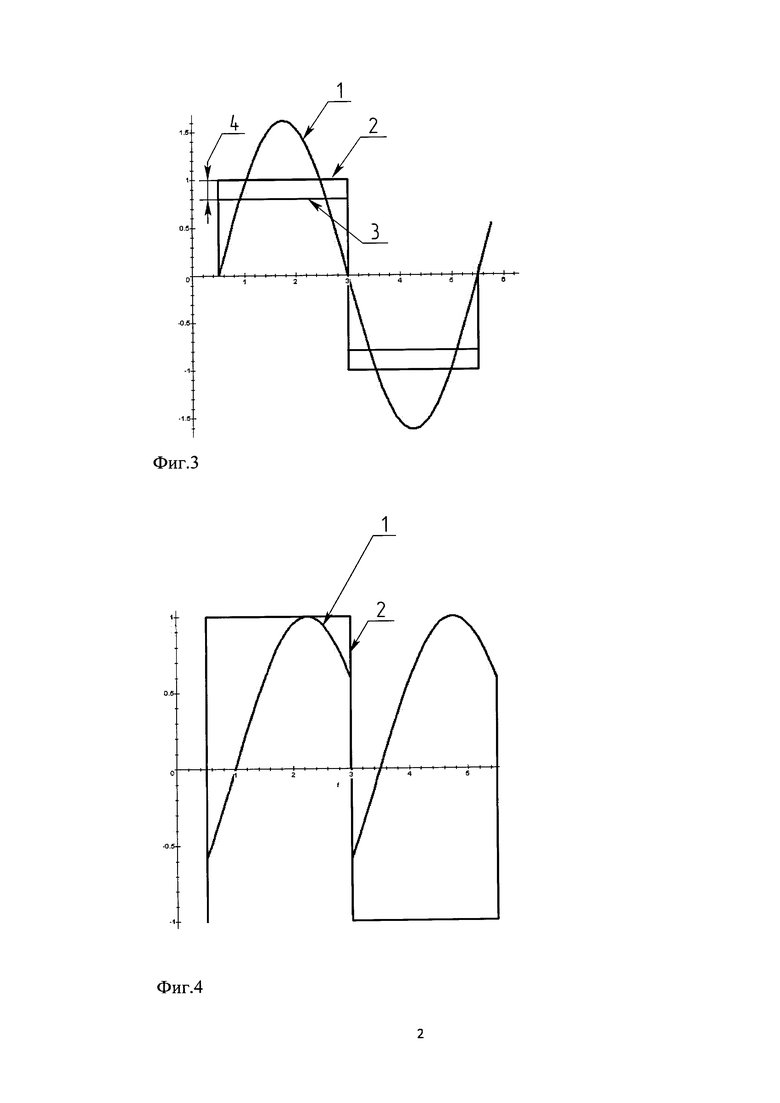
На фиг. 1, 2 показаны поведения во времени скоростей автоколебаний 1-й моды и 2-й моды соответственно.
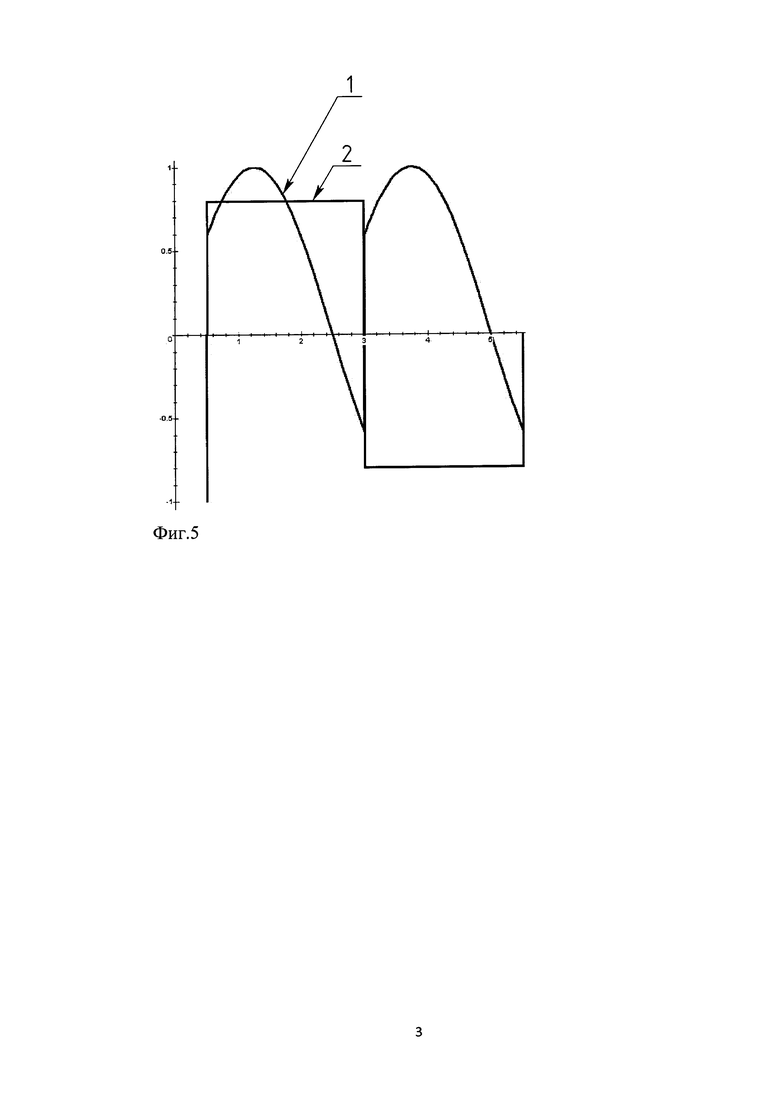
На фиг. 3: 1 – сигнал, пропорциональный сумме скоростей колебаний в 1-й моде и 2-й (ортогональной) моде; 2 - поведение во времени возбуждающей силы 1-й моды; 3 - поведение во времени возбуждающих сил 2-й моды фазы сигналов возбуждающих сил 1-й и 2-й мод колебаний равны и пропорциональны сумме скоростей колебаний в 1-й и 2-й (ортогональной) моде; 4 - разность амплитуд возбуждающих сил.
На фиг. 4 изображен процесс фазочувствительного выпрямления амплитуды скорости колебаний 1-й моды, где 1 - поведение во времени составляющей скорости колебаний 1-й моды, 2 - поведение возбуждающей силы во времени 1-й моды колебаний.
На фиг. 5 изображен процесс фазочувствительного выпрямления амплитуды скорости колебаний 2-й (ортогональной) моды, где 1 - поведение во времени составляющей скорости колебаний 2-й (ортогональной) моды, 2 - поведение возбуждающей силы во времени 2-й (ортогональной) моды колебаний.
Способ может быть реализован следующим образом. Для одновременного возбуждения автоколебаний первой и второй (ортогональной) моды со стабилизацией амплитуды скорости колебаний устройство, реализующее способ, должно содержать два контура возбуждения и стабилизации. Каждый контур возбуждения и стабилизации состоит из датчика скорости колебаний моды (например, реализованного в виде проводящей дорожки на чувствительном элементе, первый контакт которой является информационным, а второй соединен с общей шиной питания, и части общей магнитной системы, которая создает магнитный поток, ортогональный осевой линии проводящей дорожки и направлению колебаний) и усилителя сигнала (выполнен на базе операционного усилителя). Сигнал с датчика скорости колебаний моды ЭДС с проводящей дорожки сигнал пропорциональный скорости колебаний, с выхода усилителя поступает на вход фазочувствительного выпрямителя (построенного, например, на управляемых ключах). Сформированный фазочувствительным усилителем сигнал, пропорциональный амплитуде составляющей скорости колебаний, поступает на один из входов элемента сравнения (например, дифференциального усилителя). Усиленный сигнал рассогласования (напряжение), сформированный элементом сравнения, поступает на вход схемы коммутации. Устройство, реализующее способ, должно также содержать датчик силы (например, состоящий из проводящей дорожки, параллельной токопроводящей дорожке датчика скорости колебаний и находящейся в том же рабочем зазоре части общей магнитной системы).
Устройство также должно содержать источник опорного сигнала (источник опорного напряжения). Опорный сигнал с него поступает на вторые входы элементов сравнения. Для формирования сигнала, пропорционального сумме скоростей колебаний, в устройстве можно использовать сумматор (выполненный, например, на базе операционного усилителя), на первый вход которого поступает сигнал, пропорциональный скорости колебаний первой моды, с усилителя сигнала контура возбуждения первой моды, а на второй - с усилителя сигнала контура возбуждения второй (ортогональной) моды, источник и элемент формирования выходного сигнала, пропорционального разности амплитуд возбуждающих сил.
Источники информации
1. Weinberg М. et al. A Micromachined Comb Drive Tuning Fork Gyroscope for Commercial Applications. - The 2nd Saint Petersburg International Conference on Gyroscopic Technology and Navigation. - CSRI "Elektropribor", 1995. - Part 2. - P. 79.
2. Былинкин С.Ф. и другие. Способ управления чувствительным элементом и формирования выходного сигнала вибрационного кориолисова гироскопического датчика угловой скорости и устройство для его осуществления - Патент РФ №2315953 (прототип).
Изобретение относится к измерительной технике и может применяться в вибрационных кориолисовых гироскопических датчиках угловой скорости. Способ заключается в одновременном возбуждении автоколебаний первой и второй (ортогональной) мод, причем фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируется так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов, отличающийся тем, что стабилизируют амплитуду составляющей скорости колебаний, которую выделяют путем фазочувствительного выпрямления с использованием фазы сигнала, пропорционального сумме скоростей колебаний в первой и во второй (ортогональной) моде. Технический результат – повышение точности кориолисова гироскопического датчика угловой скорости. 5 ил.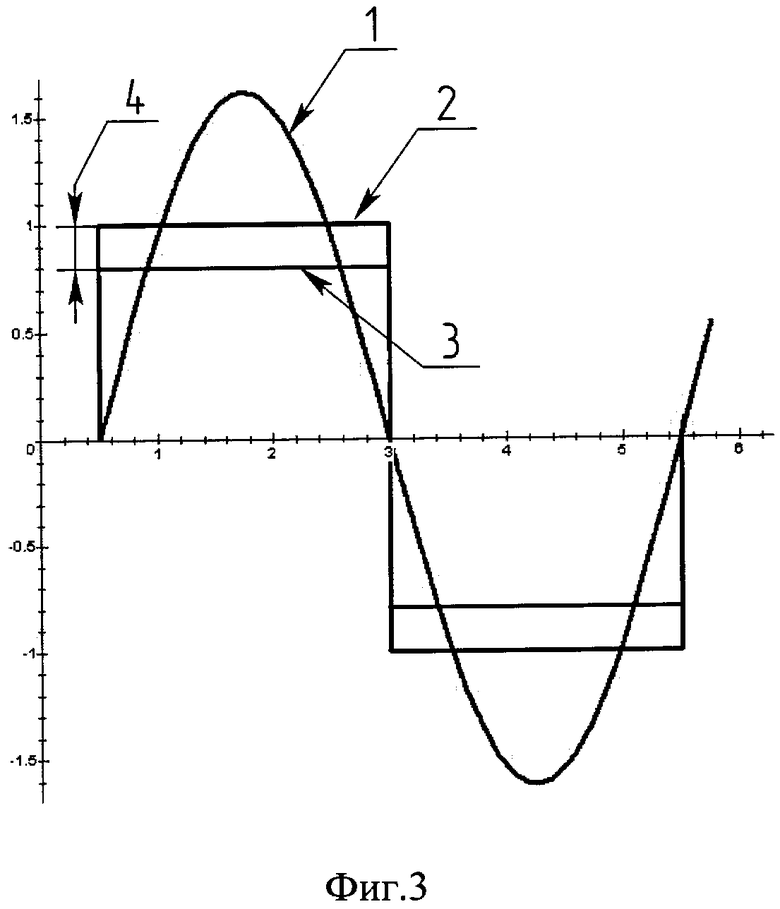
Способ управления чувствительным элементом и формирования выходного сигнала вибрационного кориолисова гироскопического датчика угловой скорости, заключающийся в одновременном возбуждении автоколебаний первой и второй (ортогональной) мод, причем фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируется так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов, отличающийся тем, что стабилизируют амплитуду составляющей скорости колебаний, которую выделяют путем фазочувствительного выпрямления с использованием фазы сигнала, пропорционального сумме скоростей колебаний в первой и во второй (ортогональной) моде.
| СПОСОБ УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ И ФОРМИРОВАНИЯ ВЫХОДНОГО СИГНАЛА ВИБРАЦИОННОГО КОРИОЛИСОВА ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315953C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085849C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНЫМ ВОЛНОВЫМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194249C1 |
| US 5893054 A1, 06.04.1999. | |||

