Изобретение относится к моделям и математическому моделированию и может быть применено как в процессе проектирования, так и в процессе конструкторско-технологической доводки технически сложного изделия.
Технически сложное изделие - это сложный технический комплекс средств, состоящий из ряда систем, закономерно объединенных в единое целое в соответствии с определенными принципами или связанных между собой заданными отношениями. В состав каждой системы входит множество взаимосвязанных элементов. Примерами технически сложных изделий могут быть изделия наукоемких отраслей производства, таких как аэрокосмической, авиационной, военной, радиоэлектронной промышленности, приборостроения, электроники, электротехники, атомного машиностроения и т.д.
Производство технически сложного изделия - это единый сложно-динамический процесс изготовления конкурентоспособного изделия, удовлетворяющего современным требованиям приемочного контроля. Он достаточно длителен и может исчисляться месяцами и даже годами. При существующих в настоящее время темпах прогресса в науке и технике в течение этого времени требования к изделию могут существенно меняться, при этом изготавливаемое изделие все равно должно соответствовать эталонному образцу, который удовлетворяет всем требованиям, предъявляемым к изделию в любой момент времени.
Из существующего уровня техники известен способ статистического полунатурного моделирования радиоэлектронного вооружения надводных кораблей, который включает определение качества технически сложного изделия вдоль жизненного цикла критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству на момент разработки проекта, определение целевого состояния проектирования и конструкторско-технологической доводки изделия, построение аналитической модели, проектирование и контроль качества изделия на основе полунатурного моделирования.. Техническим результатом данного способа является создание системы полунатурного имитационного моделирования испытаний радиоэлектронного вооружения надводного корабля при проведении реальных испытаний, позволяющих на этапе проектирования и производства оценить работоспособность радиоэлектронного вооружения надводного корабля в условиях, имитирующих реальные условия его применения (см., напр., RU 2399098, опубл. 10.09.2010).
Указанное техническое решение имеет ряд недостатков. Данный способ использует статистические модели для воспроизводства условий применения, то есть оценивает качество изделия только применительно к условиям эксплуатации и не рассматривает влияние на качество производственной среды. В частности, такие опасные явления как появление факторов риска после контроля работоспособности систем и устранения причин их появления, указанный способ не учитывает по определению. Кроме того, способ не учитывает важный фактор существенного изменения требований по техническим, эксплуатационным и экономическим характеристикам изделия в течение длительного производственного цикла, а решает задачу контроля при заранее заданных требованиях по качеству.
Предлагаемый способ исключает указанные недостатки путем применения адаптивного управления на динамических моделях по модели эталонного образца, соответствующего всем требованиям по качеству в любой момент времени жизненного цикла изделия.
Задачей, на решение которой направлено настоящее техническое решение, является создание способа адаптивного управления качеством технически сложного изделия с целью обеспечения его конкурентоспособности и соответствия современным требованиям по качеству, надежности и безопасности в любое время, в том числе и в момент поступления изделия на приемо-сдаточные испытания по прогнозу будущего состояния качества изделия.
Поставленная задача достигается за счет того, что в заявленном способе адаптивного управления качеством технически сложного изделия вдоль жизненного цикла, включающем определение качества технически сложного изделия вдоль жизненного цикла критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству, определение целевого состояния проектирования и конструкторско-технологической доводки изделия, построение аналитической модели, согласно изобретению, качество технически сложного изделия определяют вдоль жизненного цикла критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству на момент поступления изделия на приемочный контроль, вводят указанный критерий соответствия в виде функции принадлежности изделия эталонному образцу, изменяющейся в интервале от нуля до единицы, строят пространство параметров порядка на множестве показателей качества, задают в пространстве параметров порядка соответствующие функции принадлежности главных параметров порядка эталонным значениям, определяют целевое состояние проектирования и конструкторско-технологической доводки изделия равенством всех функций принадлежности единице, строят эталонную траекторию функции принадлежности изделия вдоль жизненного цикла зависимостью от начальных условий; затем строят аналитическую модель движения беспилотного летательного аппарата, для чего ставят в соответствие органам управления движением модели беспилотного летательного аппарата главные параметры порядка как предполагаемые параметры управления изменением функции принадлежности изделия вдоль производственного цикла и строят на основе подобия динамических объектов аналогию изменения функции принадлежности и движения модели беспилотного летательного аппарата, а также отображают эталонную траекторию изменения функции принадлежности изделия на траекторию движения модели беспилотного летательного аппарата; после этого моделируют движение беспилотного летательного аппарата на заданном промежутке времени по эталонной траектории, отображают отклонения органов управления движением модели беспилотного летательного аппарата на функции принадлежности параметров порядка и полученные значения функций принадлежности параметров порядка отображают на технологические карты, по которым производят конструкторско-технологическую доводку изделия; затем оценивают новое фактическое значение функции принадлежности изделия, определяющее новые начальные условия для построения новой эталонной траектории и строят новую эталонную траекторию для нового цикла адаптивного управления, который повторяют до тех пор, пока фактическая функция принадлежности изделия не будет близка к единице с заданным допуском, при этом фактическую траекторию функции принадлежности изделия строят по полученным в каждом цикле новым фактическим значениям функции принадлежности изделия, после этого оценивают устойчивость процесса адаптивного управления по критерию сходимости фактической траектории функции принадлежности изделия к целевому состоянию конструкторско-технологической доводки изделия.
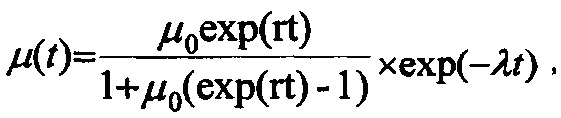
При этом эталонную траекторию функции принадлежности изделия вдоль жизненного цикла строят с помощью зависимости:
при условии 
где
μ(t) - текущее значение функции принадлежности изделия, ед.,
μ0 - начальное значение функции принадлежности изделия, ед.,
r - параметр развития, ед.,
λ - параметр стабилизации, ед.,
h - допуск на неопределенность целевого состояния изделия, ед.,
t - текущее время, ч,
T* - время поступления изделия на приемочный контроль, ч.
Техническим результатом, достигаемым приведенной совокупностью признаков, является сокращение сроков и затрат на разработку и постановку изделия на производство и его конструкторско-технологическую доводку, выявление и устранение факторов риска возникновения опасных явлений после производственного контроля по всему производственному циклу, в том числе до момента поступления изделия на приемочный контрль обеспечение соответствия качества изделия эталонному образцу на момент поступления изделия на приемо-сдаточные испытания и по всему жизненному циклу за счет циклически повторяющегося процесса пошагового определения целевого состояния качества изделия, построения на каждом шаге эталонной траектории изменения качества изделия, определения эталонных значений функций принадлежности параметров порядка путем установления соответствия на основе динамического подобия изменения функции принадлежности изделия и траектории движения модели беспилотного летательного аппарата по эталонной траектории, являющейся отображением эталонной траектории функции принадлежности изделия на траекторию движения модели беспилотного летательного аппарата и последующего моделирования полета модели беспилотного летательного аппарата по эталонной траектории, определения фактической траектории качества изделия и фактических значений параметров порядка и осуществления проектирования и доводки изделия на основе рассогласования их с эталонными значениями.
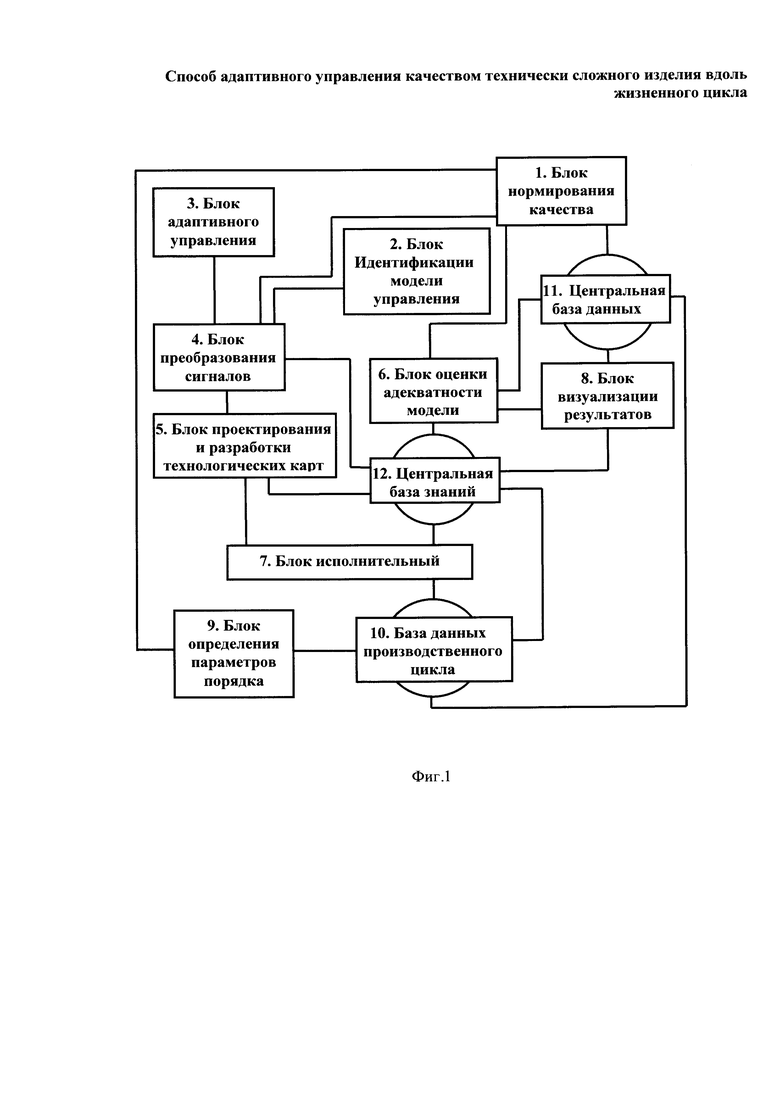
Сущность заявленного способа поясняется на примере его применения на основе автоматизированного комплекса адаптивного управления качеством технически сложного изделия вдоль жизненного цикла, блок-схема которого приведена на фиг. 1.
Автоматизированный комплекс состоит из компьютерных блоков, которые распределены на структуре изделия вдоль жизненного цикла, соединены между собой информационной связью и обозначены на блок-схеме следующими позициями:
1 - Блок нормирования качества
2 - Блок идентификации модели управления
3 - Блок адаптивного управления
4 - Блок преобразования сигналов
5 - Блок проектирования и разработки технологических карт
6 - Блок оценки адекватности модели
7 - Блок исполнительный
8 - Блок визуализации результатов
9 - Блок определения параметров порядка
10 - База данных производственного цикла
11 - Центральная база данных
12 - Центральная база знаний
Суть способа заключается в пошаговом определении целевого состояния качества изделия, построении на каждом шаге эталонной траектории изменения качества изделия и осуществлении проектирования и доводки изделия вдоль всего жизненного цикла на основе динамической модели с последующей оценкой ее адекватности и уточнения модели адаптивного управления.
Для этого сначала определяют качество технически сложного изделия критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству вдоль всего жизненного цикла. Вводят указанный критерий соответствия в блок 1 нормирования качества в виде функции принадлежности изделия эталонному образцу, изменяющейся в интервале от нуля до единицы, и передают его в блок 6 оценки адекватности модели и в центральную базу 12 знаний.
Из базы 10 данных производственного цикла в блок 9 определения параметров порядка передают показатели качества. В блоке 9 определения параметров порядка строят пространство главных параметров порядка на множестве показателей качества вдоль всего жизненного цикла. Полученные данные направляют в базу 10 данных производственного цикла, откуда они поступают в центральную базу 12 знаний для обработки, хранения и дальнейшего использования. Главные параметры порядка характеризуют состояние производства изделия. При построении пространства главных параметров порядка каждому главному параметру порядка ставят в соответствие функции принадлежности их значений эталонным значениям, то есть тем значениям, которые соответствуют производству эталонного образца.
В этом же блоке 9 определения параметров порядка задают в пространстве параметров порядка соответствующие функции принадлежности главных параметров порядка эталонным значениям и передают их в базу 10 данных производственного цикла, откуда они поступают в центральную базу 12 знаний для обработки, хранения и дальнейшего использования, а также в блок 1 нормирования качества, где определяют целевое состояние проектирования и конструкторско-технологической доводки изделия равенством всех функций принадлежности единице и передают показатели целевого состояния через блок 4 преобразования сигналов в блок 2 идентификации модели управления, откуда они поступают в центральную базу 12 знаний и базу 10 данных производственного цикла.
В блоке 1 нормирования качества строят эталонную траекторию функции принадлежности изделия вдоль жизненного цикла с помощью зависимости

где
μ(t) - текущее значение функции принадлежности изделия, ед.
μ0 - начальное значение функции принадлежности изделия, ед.
r - параметр развития, ед.
λ - параметр стабилизации, ед.
h - допуск на неопределенность целевого состояния изделия, ч.
t - текущее время, ч.
μ(t)=1 при следующих условиях:
 при t=T*
при t=T*
 ,
,
 ,
,
 ,
,
 ,
,
где
μ(t) - текущее значение функции принадлежности изделия, ед.
μ0 - начальное значение функции принадлежности изделия,  , ед.
, ед.
r - параметр развития, ед.
λ - параметр стабилизации, ед.
c1 - инвестиции в развитие, ед.
c2 - инвестиции в стабилизацию, ед.
t - текущее время, ч
T* - время поступления изделия на приемочный контроль, ч
Ti - время поступления на приемочный контроль изделий конкурентов, ч
Ψ - целевая функция, ч.
Передают эталонную траекторию через блок 4 преобразования сигналов в блок 2 идентификации модели управления и в центральную базу 12 знаний, откуда они поступают в базу 10 данных производственного цикла.
В блоке 2 идентификации модели управления строят аналитическую модель движения беспилотного летательного аппарата, для чего вводят из центральной базы 12 знаний аналитическую модель продольного движения модели беспилотного летательного аппарата. Для этого ставят в соответствие органам управления движением модели беспилотного летательного аппарата главные параметры порядка как предполагаемые параметры управления изменением функции принадлежности изделия вдоль производственного цикла; строят на основе подобия динамических объектов аналогию изменения функции принадлежности и движения модели беспилотного летательного аппарата, определяют коэффициент подобия (соответствия) из условия одновременного достижения целевого состояния целевой функцией изделия и движением модели беспилотного летательного аппарата:
 ,
,
где
W - коэффициент подобия, 
Н - высота полета модели беспилотного летательного аппарата в момент достижения целевого состояния функции принадлежности изделия, когда все функции принадлежности равны 1, м.
С помощью коэффициента подобия W отображают эталонную траекторию изменения функции принадлежности изделия на эталонную траекторию движения модели беспилотного летательного аппарата. Построенную аналитическую модель через блок 4 преобразования сигналов передают в блок 3 адаптивного управления.
В блоке 3 адаптивного управления моделируют движение беспилотного летательного аппарата к целевому состоянию на заданном промежутке времени по эталонной траектории. При этом, определяют положения органов управления, необходимые для удержания модели беспилотного летательного аппарата на эталонной траектории. Кроме того, отображают отклонения органов управления движением модели беспилотного летательного аппарата на функции принадлежности главных параметров порядка, принимают их значения за эталонные и направляют их через блок 4 преобразования сигналов в блок 5 проектирования и разработки технологических карт, откуда они поступают в центральную базу 12 знаний, откуда они последовательно поступают в базу 10 данных производственного цикла.
В блоке 5 проектирования и разработки технологических карт полученные значения функций принадлежности параметров порядка отображают на технологические карты и передают полученные данные в блок 7 исполнительный, где производят конструкторско-технологическую доводку изделия и оценивают новое фактическое значение функции принадлежности изделия, определяющее новые начальные условия для построения новой эталонной траектории. Полученные новые начальные условия передают через базу 10 данных производственного цикла в центральную базу 11 данных, в блок 1 нормирования качества, а также в блок 2 идентификации модели управления для корректировки модели адаптивного управления
В блоке 2 идентификации модели управления по рассогласованию фактической и эталонной траектории с применением методов максимального правдоподобия корректируют модель адаптивного управления и передают новую модель через блок 4 преобразования сигналов в блок 3 адаптивного управления для использования в следующем цикле управления.
В блоке 1 нормирования качества строят по указанной формуле новую эталонную траекторию для нового цикла адаптивного управления, который повторяют до тех пор, пока фактическая функция принадлежности изделия не будет близка к единице с заданным допуском. При этом, фактическую траекторию функции принадлежности изделия строят на основе ретроспективного анализа по полученным в каждом цикле новым фактическим значениям функции принадлежности изделия, поступающим из центральной базы 11 данных, и передают ее в блок 6 оценки адекватности модели.
В блоке 6 оценки адекватности модели оценивают устойчивость процесса адаптивного управления по критерию сходимости фактической траектории функции принадлежности изделия к его целевому состоянию (критерию устойчивости Ляпунова) и уточняют модель адаптивного управления.
Блок 8 визуализации результатов и блок 9 определения параметров порядка 9 осуществляют визуализацию результатов, поступающих из трех баз данных 10, 11, 12 и контролируют процесс. Базы данных 10, 11 и 12 образуют единую информационную сеть.
Настоящее техническое решение является альтернативным подходом к решению проблемы рисков на основе системного синтеза путем использования динамических моделей дуального управления по целевому состоянию и создания адаптивного производства с применением модернизации на знаниях, получаемых в реальном масштабе времени, положительной и отрицательной обратных связях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивного управления производством технически сложного изделия вдоль жизненного цикла | 2019 |
|
RU2709156C1 |
| Автоматизированный комплекс адаптивного управления производством технически сложного изделия посредством системного синтеза на основе полунатурного моделирования | 2020 |
|
RU2744098C1 |
| Способ создания авиационных двигателей | 2017 |
|
RU2726958C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКИМ ОБЪЕКТОМ И ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2730387C2 |
| Интеллектуальная система управления предприятием | 2020 |
|
RU2746687C1 |
| СПОСОБ КОМПЛЕКСНОГО УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ | 2017 |
|
RU2657093C1 |
| Способ автономного приземления беспилотного летательного аппарата на мобильную платформу | 2023 |
|
RU2821253C1 |
| СПОСОБ НАВИГАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2767477C1 |
| СПОСОБ АДАПТИВНОЙ ОБРАБОТКИ ИЗДЕЛИЙ НА СТАНКАХ С ЧПУ | 2012 |
|
RU2528923C2 |
| Способ эксплуатации авиационного газотурбинного двигателя по его техническому состоянию | 2022 |
|
RU2796563C1 |
Изобретение относится к математическому моделированию. Способ адаптивного управления качеством технически сложного изделия вдоль жизненного цикла на основе динамических моделей представляет собой циклически повторяющийся процесс пошагового определения целевого состояния качества изделия, построения на каждом шаге эталонной траектории изменения качества изделия. На каждом шаге при изменении начальных условий строят новые динамические модели, на основе которых осуществляют испытания, проектирование и доводку изделия. Цикл повторяется до тех пор, пока не будет достигнуто целевое состояние качества изделия. На основе ретроспективного анализа осуществляют оценку адекватности адаптивного управления и уточнение модели адаптивного управления. Сокращаются сроки на разработку изделия. 1 з.п. ф-лы, 1 ил.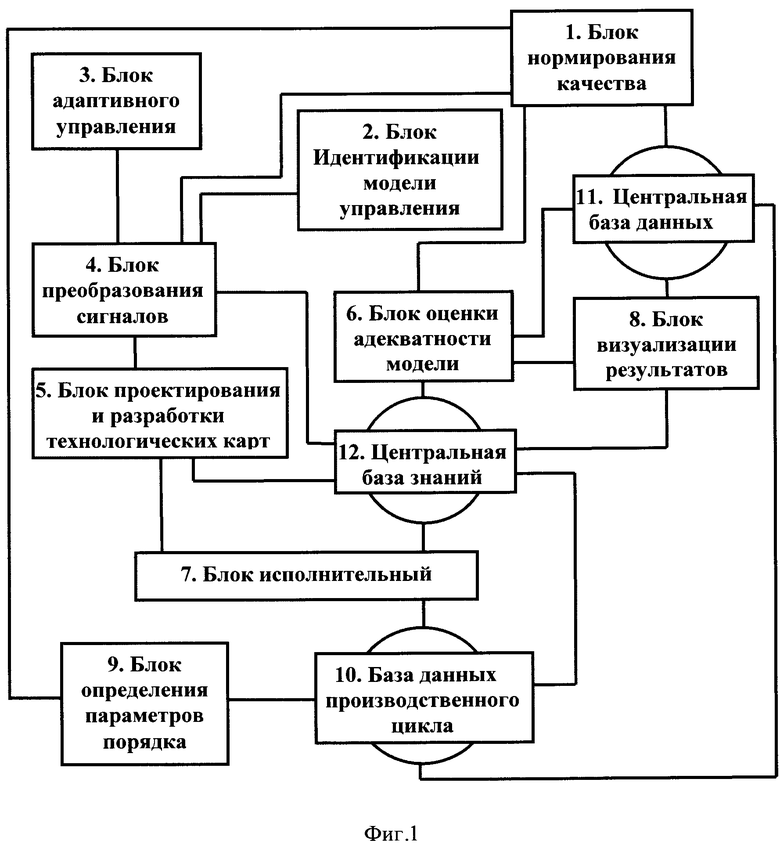
1. Способ адаптивного управления качеством технически сложного изделия вдоль жизненного цикла на основе динамических моделей, включающий определение качества технически сложного изделия вдоль жизненного цикла критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству, определение целевого состояния проектирования и конструкторско-технологической доводки изделия, построение аналитической модели, отличающийся тем, что качество технически сложного изделия определяют вдоль жизненного цикла критерием соответствия изделия эталонному образцу, который удовлетворяет всем требованиям по качеству на момент поступления изделия на приемочный контроль, вводят указанный критерий соответствия в виде функции принадлежности изделия эталонному образцу, изменяющейся в интервале от нуля до единицы, строят пространство параметров порядка на множестве показателей качества, задают в пространстве параметров порядка соответствующие функции принадлежности главных параметров порядка эталонным значениям, определяют целевое состояние проектирования и конструкторско-технологической доводки изделия равенством всех функций принадлежности единице, строят эталонную траекторию функции принадлежности изделия вдоль жизненного цикла зависимостью от начальных условий; затем строят аналитическую модель движения беспилотного летательного аппарата, для чего ставят в соответствие органам управления движением модели беспилотного летательного аппарата главные параметры порядка как предполагаемые параметры управления изменением функции принадлежности изделия вдоль производственного цикла и строят на основе подобия динамических объектов аналогию изменения функции принадлежности и движения модели беспилотного летательного аппарата, а также отображают эталонную траекторию изменения функции принадлежности изделия на траекторию движения модели беспилотного летательного аппарата; после этого моделируют движение беспилотного летательного аппарата на заданном промежутке времени по эталонной траектории, отображают отклонения органов управления движением модели беспилотного летательного аппарата на функции принадлежности параметров порядка и полученные значения функций принадлежности параметров порядка отображают на технологические карты, по которым производят конструкторско-технологическую доводку изделия; затем оценивают новое фактическое значение функции принадлежности изделия, определяющее новые начальные условия для построения новой эталонной траектории, и строят новую эталонную траекторию для нового цикла адаптивного управления, который повторяют до тех пор, пока фактическая функция принадлежности изделия не будет близка к единице с заданным допуском, при этом фактическую траекторию функции принадлежности изделия строят по полученным в каждом цикле новым фактическим значениям функции принадлежности изделия, после этого оценивают устойчивость процесса адаптивного управления по критерию сходимости фактической траектории функции принадлежности изделия к целевому состоянию конструкторско-технологической доводки изделия.
2. Способ по п. 1, отличающийся тем, что эталонную траекторию функции принадлежности изделия вдоль жизненного цикла строят с помощью зависимости:
при условии  ,
,
где μ(t) - текущее значение функции принадлежности изделия,
μ0 - начальное значение функции принадлежности изделия, ед.,
r - параметр развития, ед.,
λ - параметр стабилизации, ед.,
h - допуск на неопределенность целевого состояния изделия, ед.,
t - текущее время, ч,
T* - время поступления изделия на приемочный контроль, ч.
| СПОСОБ ОБСЛУЖИВАНИЯ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2537801C2 |
| СПОСОБ ОБРАБОТКИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2608430C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПРЕДДЕФЕКТНОГО СОСТОЯНИЯ ТЕХНИЧЕСКОГО ОБЪЕКТА | 1992 |
|
RU2050577C1 |
| СПОСОБ АДАПТИВНОГО ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ЭКСПЛУАТАЦИИ СЛОЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2533321C1 |

