Изобретение относится к области автономной навигации беспилотных летательных аппаратов по оптическим изображениям земной поверхности.
Известен способ навигации по радиолокационным изображениям, описанный в патенте US №5430445, 12.31.1992, G01S 13/90, в котором эталонное радиолокационное изображение формируется на основе предварительно полученного фотоснимка заданного участка земной поверхности. Процедура подготовки эталона состоит из четырех этапов: перевод фотоснимка в цифровую форму с помощью сканера, выбор участка сцены для формирования эталона, оконтуривание и классификация информативных деталей, генерация эталонного радиолокационного изображения. Затем радиолокационное изображение обрабатывается с целью выделения информативных признаков. Такими признаками служат локальные градиенты яркости. После данной процедуры эталонное радиолокационное изображение представляет собой совокупность объектов, описывающих границы положительных и отрицательных перепадов яркости. Обработанное эталонное радиолокационное изображение передается в память бортового вычислителя летательного аппарата и используется при корреляционном сопоставлении с рабочим радиолокационным изображением.
В результате обработки создается корреляционная матрица двух изображений. После поиска максимального значения совпадений информативных объектов эталонного и рабочего радиолокационного изображения производится оценка координат опорной точки (контура) с учетом ошибок инерциальной навигационной системы.
Недостатком способа является его низкая радиопомехозащищенность, так как используется только радиолокационное изображение, и отсутствие возможности автономной работы.
Наиболее близким по технической сущности аналогом предлагаемого способа является способ навигации летательного аппарата по радиолокационным изображениям земной поверхности с использованием цифровых моделей местности [Патент RU2364887C2, МПК G01S 13/90, 20.08.2009, Бюл. №23], выбранный за прототип.
Реализация данного способа заключается в следующем. Эталонное радиолокационное изображение рассчитывают в процессе движения с помощью цифровых моделей местности, заранее подготовленных на основе векторных карт местности, а оценку навигационных ошибок инерциальной системы управления получают с помощью параметров максимума двумерной взаимокорреляционной функции эталонного и рабочего радиолокационного изображения через индексы положения максимума в матрице взаимокорреляционной функции.
Однако такой способ обладает следующими недостатками: необходимость наличия предварительно подготовленных цифровых моделей и векторных карт местности, которые не всегда отражают действительную экспозицию объектов на момент пролета летательного аппарата, необходимость активного излучения зондирующего сигнала для получения радиолокационного изображения в процессе полета и низкая помехозащищенность приемных трактов локационной системы летательного аппарата от направленных помех, приводящая к искажению радиолокационного изображения и появлению ложных опорных точек (контуров) или их пропуску.
Предлагаемый способ имеет существенное отличие, заключающееся в использовании оптико-электронной системы инфракрасного диапазона длин волн, обеспечивающих получение инфракрасных изображений при ведении съемки с беспилотных летательных аппаратов, при этом оптико-электронные системы направлены строго вниз, перпендикулярно астрономическому горизонту относительно беспилотного летательного аппарата, т.е. в надир, с последующей пороговой обработкой этих изображений с эталонными инфракрасными изображениями.
Техническим результатом предлагаемого способа является повышение точности определения навигационных параметров беспилотного летательного аппарата в условиях некорректной работы приемника глобальных систем спутниковой навигации, путем проведения навигационных расчетов по инфракрасным изображениям получаемых оптико-электронной системой с беспилотного летательного аппарата, которые характеризуются большим пространственным разрешением по сравнению с радиолокационным изображением, и позволяющих осуществлять навигацию беспилотного летательного аппарата в любое время суток.
Данный технический результат достигается тем, что для автономной навигации беспилотного летательного аппарата эталонные и рабочие изображения получают с помощью оптико-электронной системы в инфракрасном диапазоне. Эталонные изображения подготавливают на основе тепловой модели местности, путем решения прямой задачи радиационного теплопереноса с учетом плотности потока падающего солнечного излучения, температуры воздуха и высоты полета для заданных участков местности траектории полета и соответствующих периодов астрономического времени. Рабочие изображения регистрируют в процессе съемки в надир с помощью оптико-электронной системы в инфракрасном диапазоне. Полученные эталонные и рабочие инфракрасные изображения подвергают пороговой обработке, в результате которой формируют эталонные и рабочие матрицы опорных точек (контуров) объектов. Осуществляют расчет двумерной матрицы взаимокорреляционной функции, находят ее максимум, и оценивают географическое положение максимума взаимокорреляционной функции по эталонной матрице опорных точек (контуров). Используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотного летательного аппарата, по данным измеренных значений курса, крена, тангажа и высоты беспилотного летательного аппарата.
Сущность изобретения заключается в том, что для навигации беспилотного летательного аппарата по данным инфракрасных изображений, получаемых с помощью оптико-электронной системы, предварительно на основе цифровых моделей местности, включающей тепловую модель местности и матрицу высот, для заданных моментов времени, формируют эталонные изображения участков местности траектории полета беспилотного летательного аппарата.
Эта процедура осуществляется путем решения прямой задачи радиационного теплопереноса на основе тепловой модели местности с учетом плотности потока падающего солнечного излучения, температуры воздуха и высоты полета. Тепловая модель местности представляет собой пространственное распределение теплофизических параметров: теплопроводности, теплоемкости, плотности и излучательной способности объектов и фонов. Тепловую модель получают путем дистанционного определения пространственного распределения теплофизических параметров земной поверхности [Патент RU2707387C1, МПК G01J 5/00, 26.11.2019].
Рассчитанные таким способом эталонные инфракрасные изображения подвергаются пороговой обработке для выделения опорных точек (контуров) и их информативных признаков - дескрипторов опорных точек (контуров), а именно площадь и форма, которые будут использоваться для автономной навигации беспилотного летательного аппарата.
Необходимость расчета множества разновременных эталонных инфракрасных изображений обуславливается следующим. Инфракрасное изображение участка местности в течении суток с непостоянными внешними метеорологическими условиями меняют свой контраст. Такое явление называется инверсией тепловых контрастов, которое наступает в зависимости от погодных условий и связано с восходом и заходом солнца. В следствии этого, сопоставлению подвергаются только те эталонные матрицы опорных точек (контуров), которые соответствуют астрономическому времени рабочих матриц опорных точек (контуров).
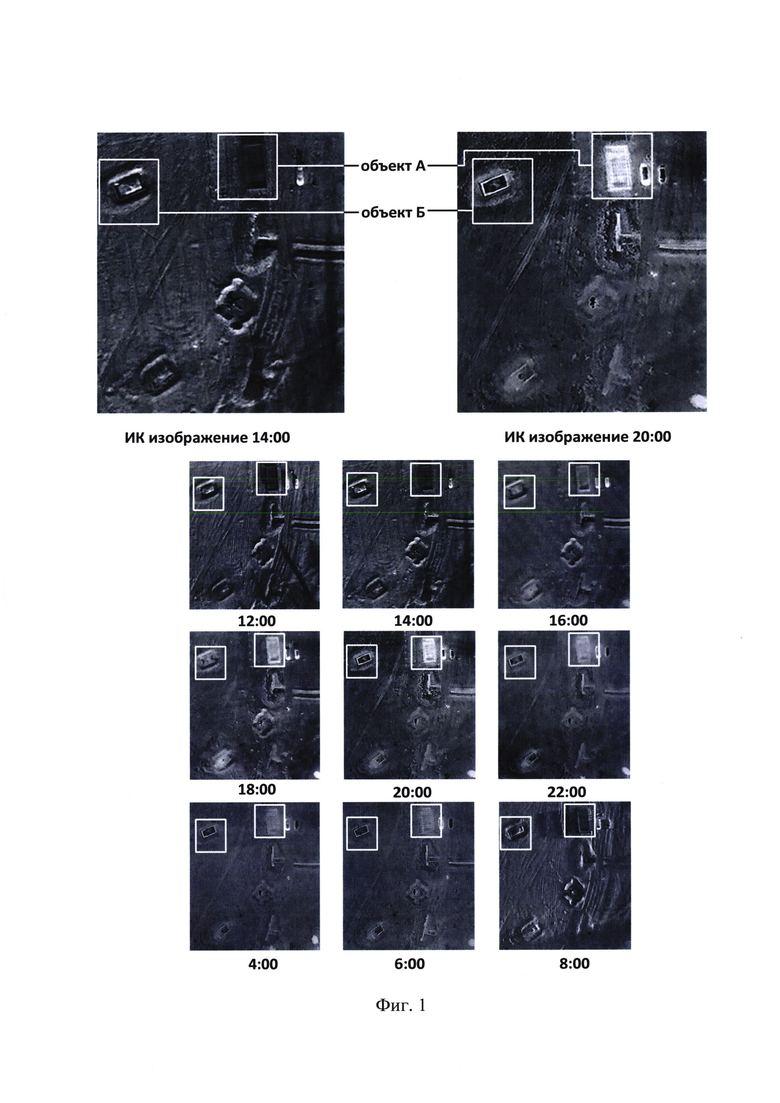
На фиг.1 представлены разновременные инфракрасные изображения одного и того же участка местности, полученные в течении суток. Анализ данных изображений показывает, что выделенные объекты относительно фона меняют свой контраст. Так яркость объекта А (бетонная плита) в 14:00 меньше фона, а в 20:00, тех же суток, ярче фона, в свою очередь для объекта Б (макет автомобильной техники) изменение яркости по отношению к фону наоборот уменьшается. Следовательно эталонные инфракрасные изображения могут быть использованы для их сопоставления с рабочими инфракрасными изображениями только для заданных временных интервалов астрономического времени, и, как правило, одно эталонное инфракрасное изображение применяется в интервале времени не превышающем двух часов.
На фиг.2 представлен вариант схемы устройства, реализующего предлагаемый способ навигации летательных аппаратов, где:
1 - беспилотный летательный аппарат;
1.1 - бортовой вычислитель с акселерометром и гироскопом;
1.2 - гиростабилизированная платформа с оптико-электронной системой инфракрасного диапазона длин волн;
1.3 - барометрический высотомер;
1.4 - приемник глобальных систем спутниковой навигации;
1.5 - приемо-передающее устройство беспилотного летательного аппарата;
1.6 - блок регистрации количества суммарной солнечной радиации и измерения температуры приземного слоя воздуха;
2 - наземный пункт управления;
2.1 - приемо-передающее устройство наземной станции управления;
2.2 - база данных эталонных изображений.
Блок 1.1 предназначен для решения задачи автономной навигации беспилотного летательного аппарата с учетом вектора скорости по данным текущих углов отклонения по курсу, крену и тангажу беспилотного летательного аппарата, измеряемых с помощью акселерометров и гироскопа.
Блок 1.2 предназначен для получения изображений исследуемой поверхности в инфракрасном диапазоне. Съемка в инфракрасном диапазоне осуществляется в надир.
Блок 1.3 барометрический высотомер предназначен для точного измерения высоты полета беспилотного летательного аппарата и последующей совместной обработки получаемых от оптико-электронной системы инфракрасных изображений с эталонными инфракрасными изображениями в одном масштабе.
Блок 1.4 обеспечивает навигацию беспилотного летательного аппарата по сигналу глобальных систем спутниковой навигации. В условиях некорректной работы приемника глобальных систем спутниковой навигации или его отказе, формируется управляющий сигнал в блок 1.1 о переходе в режим автономной навигации по инфракрасным изображениям получаемых оптико-электронной системой с беспилотного летательного аппарата.
Блок 1.5 приемо-передающее устройство беспилотного летательного аппарата, обеспечивает формирование канала управления с наземным пунктом управления (блок 2).
Блок 1.6 регистрации количества суммарной солнечной радиации и измерения температуры приземного слоя воздуха, обеспечивает повышение точности расчета эталонных инфракрасных изображений на основе тепловой модели местности с учетом плотности потока падающего солнечного излучения и температуры воздуха [Патент RU2707387C1, МПК G01J 5/00, 26.11.2019].
Блок 2 обеспечивает передачу данных (эталонных инфракрасных изображений, данных телеметрии) между беспилотным летательным аппаратом (блок 1) и наземным пунктом управления (блок 2).
Блок 2.1 предназначен для приема данных телеметрии беспилотного летательного аппарата и передачи на борт летательного аппарата эталонных инфракрасных изображений, находящихся в базе данных блока 2.2.
На фиг.3 представлен алгоритм определения опорных точек (контуров) и их дескрипторов с географическими координатами, сопоставлением рабочей и эталонной матрицы опорных точек (контуров) на основе вычисления взаимокорреляционной функции, где:
3 - Пороговая обработка эталонных инфракрасных изображений, которая осуществляется с помощью алгоритма заключающегося в последовательном выполнении следующих этапов:
3.1 - Формирование тепловой модели местности;
3.2 - Решение прямой задачи радиационного теплопереноса на основе тепловой модели местности с учетом плотности потока падающего солнечного излучения и температуры воздуха для заданных участков местности траектории полета и моментов времени с получением эталонных инфракрасных изображений;
3.3 - Медианная фильтрация изображений;
3.4 - Адаптивная бинаризация изображений;
3.5 - Фильтрация изображений с замыканием границ и формированием множества опорных точек (контуров) и расчетом их дескрипторов;
3.6 - Определение центра тяжести для каждой опорной точки (контура);
3.7 - Расчет географических координат центров тяжести для каждой опорной точки (контура);
3.8 - Формирование базы данных эталонных инфракрасных изображений и их эталонных матриц опорных точек (контуров).
4 - пороговая обработка рабочих инфракрасных изображений, которая осуществляется с помощью алгоритма заключающегося в последовательном выполнении следующих этапов:
4.1 - Получение инфракрасных изображений от оптико-электронных систем подстилающей поверхности участка местности в надир во время полета беспилотного летательного аппарата;
4.2 - Медианная фильтрация изображений;
4.3 - Адаптивная бинаризация изображений;
4.4 - Фильтрация изображений с замыканием границ и формированием множества опорных точек (контуров)и расчетом их дескрипторов;
4.5 - Определение центра тяжести для каждой опорной точки (контура);
4.6 - Определение опорных точек (контуров) по центру тяжести объектов;
4.7 - Определение дескрипторов опорных точек (контуров);
4.8 - Получение рабочей матрицы опорных точек (контуров).
5 - Сопоставление рабочей и эталонной матрицы опорных точек (контуров) на основе вычисления максимума взаимокорреляционной функции;
6 - Присвоение рабочему инфракрасному изображению известных координат опорных точек (контуров) эталонных инфракрасных снимков;
7 - Запись совмещенной рабочей матрицы опорных точек (контуров);
8 - Определение географического положения беспилотного летательного аппарата;
9 - Выдача информации для корректировки маршрута движения беспилотного летательного аппарата.
Результатом пороговой обработки эталонных инфракрасных изображений являются эталонные матрицы опорных точек (контуров) с их дескрипторами и данными географических координат центра тяжести для каждого элемента множества опорных точек (контуров).
Непосредственно, в процессе полета беспилотного летательного аппарата на измеренной, с помощью барометрического высотомера (блока 1.3, фиг 2), высоте, задачу навигации на заданных участках местности и траектории полета по данным эталонных инфракрасных изображений или эталонных матриц опорных точек (контуров) решают путем получения от оптико-электронной системы рабочих изображений местности снятых в надир с последующей их пороговой обработкой согласно алгоритма (блоков 4.1-4.7, фиг 3). В результате обработки данным алгоритмом рабочих инфракрасных изображений в режиме близком к реальному времени с заданной периодичностью получают рабочие матрицы опорных точек (контуров) (блок 4.8, фиг 3). Используя эталонные и рабочие матрицы опорных точек (контуров) одного и того же участка местности с помощью бортового вычислителя блока 1.1 (фиг.2) по алгоритму блока 5 (фиг.3), осуществляют расчет двумерной матрицы взаимокорреляционной функции, находят максимум взаимокорреляционной функции, оценивают географическое положение максимума взаимокорреляционной функции по эталонной матрице опорных точек (контуров) и используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотного летательного аппарата, по данным измеренных значений курса, крена, тангажа и высоты летательного аппарата.
Таким образом траектория может быть выбрана или скорректирована непосредственно в процессе движения беспилотного летательного аппарата. В блоке 8 (фиг.3) происходит определение географического положения беспилотного летательного аппарата. Блок 9 (фиг.3) выдает информацию для корректировки маршрута движения беспилотного летательного аппарата.
Реализация процедур предварительной и непосредственной обработки инфракрасных изображений может быть осуществлена следующими вариантами:
Первый вариант. Пороговую обработку эталонных инфракрасных изображений осуществляют до начала полета беспилотного летательного аппарата, и на борт беспилотного летательного аппарата загружают уже рассчитанные эталонные матрицы опорных точек (контуров). Автономная навигация реализуется в соответствии с алгоритмом фиг.3.
Второй вариант. На борт беспилотного летательного аппарата, во время его полета, с помощью блоков 1.5 и 2.1 (фиг.2), загружаются эталонные инфракрасные изображения, которые, бортовым вычислителем блока 1.1 (фиг.2), подвергаются пороговой обработке по алгоритму фиг.3 для получения эталонных матриц опорных точек (контуров). Автономная навигация реализуется в соответствии с алгоритмом фиг.3.
Третий вариант. При осуществлении навигации беспилотного летательного аппарата по данным глобальных систем спутниковой навигации (блок 1.4, фиг.2) с заданной периодичностью, с помощью оптико-электронной системы фиксируют инфракрасные изображения подстилающей поверхности в надир и передают эту информацию в бортовой вычислитель (блок 1.1, фиг.2) для пороговой обработки этих инфракрасных изображений с известными географическими координатами, затем по алгоритму блоков 6 и 7 (фиг.3), рассчитывают эталонные матрицы опорных точек (контуров) с последующим их сохранением в памяти блока 1.1 (фиг.2) При отказе приемника глобальных систем спутниковой навигации (блок 1.4, фиг.2) или попадании беспилотного летательного аппарата в сложную радионавигационную обстановку, не позволяющей корректно определять свое местоположение по данным глобальных систем спутниковой навигации, автономная навигация беспилотного летательного аппарата осуществляется по сохраненным в блоке 1.1 (фиг.2) эталонным матрицам опорных точек (контуров).
Перед получением рабочей матрицы опорных точек (контуров) участка местности траектории полета выполняется процедура оценки вектора собственной скорости беспилотного летательного аппарата и его высоты полета над местностью в окрестности опорных точек (контуров) (блок 1.3, фиг.2). Это делается с целью сокращения объема расчетов при цифровой обработке рабочей матрицы опорных точек (контуров). По окончании оценки вектора собственной скорости беспилотного летательного аппарата и его высоты над местностью в окрестности опорных точек (контуров) рабочее инфракрасное изображение подвергается пороговой обработке (блок 4, фиг.3) с получением опорных точек (контуров) и их географических координат (блок 5, фиг.3). Координаты совпадающих опорных точек (контуров) обеих матриц опорных точек (контуров) в географической системе координат несут информацию о взаимном положении этих инфракрасных изображений в горизонтальной плоскости. В момент взаимного совмещения рабочей и эталонной матриц опорных точек (контуров) одного периода астрономического времени (блоки 5 и 6, фиг.3), текущая рабочая матрица опорных точек (контуров) записывается в базу данных эталонных матриц опорных точек (контуров) в блок 1.1 (фиг.2) и становится эталонной, после чего выполняется последовательность действий пороговой фильтрации для рабочих инфракрасных изображений с вычислением взаимокорреляционной функции согласно алгоритму фиг.3.
Предлагаемый способ может быть реализован устройством состоящим из узлов и агрегатов серийного выпуска промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ С СИСТЕМОЙ ВЫБОРА ПРИОРИТЕТА | 2023 |
|
RU2823452C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| КОМПЛЕКСНАЯ КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2525601C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| Способ доставки малокалиберных боеприпасов до цели с помощью автономного беспилотного летательного аппарата | 2024 |
|
RU2828335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |


Изобретение относится к области автономной навигации беспилотных летательных аппаратов по оптическим изображениям земной поверхности. Способ автономной навигации беспилотных летательных аппаратов заключается в том, что эталонные и рабочие изображения получают с помощью оптико-электронных систем в инфракрасном диапазоне. Эталонные изображения подготавливают на основе тепловой модели местности путем решения прямой задачи радиационного теплопереноса с учетом плотности потока падающего солнечного излучения, температуры воздуха и высоты полета для заданных участков местности траектории полета и соответствующих периодов астрономического времени. Рабочие изображения регистрируют в процессе съемки в надир с помощью оптико-электронных систем в инфракрасном диапазоне. Полученные эталонные и рабочие инфракрасные изображения подвергают пороговой обработке, в результате которой формируют эталонные и рабочие матрицы опорных точек (контуров) объектов. Осуществляют расчет и находят максимум двумерной матрицы взаимокорреляционной функции, и оценивают географическое положение максимума взаимокорреляционной функции по эталонной матрице опорных точек (контуров). Используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотных летательных аппаратов по данным измеренных значений курса, крена, тангажа и высоты беспилотного летательного аппарата. Технический результат - повышение точности определения навигационных параметров беспилотного летательного аппарата в условиях некорректной работы приемника глобальных систем спутниковой навигации. 3 ил.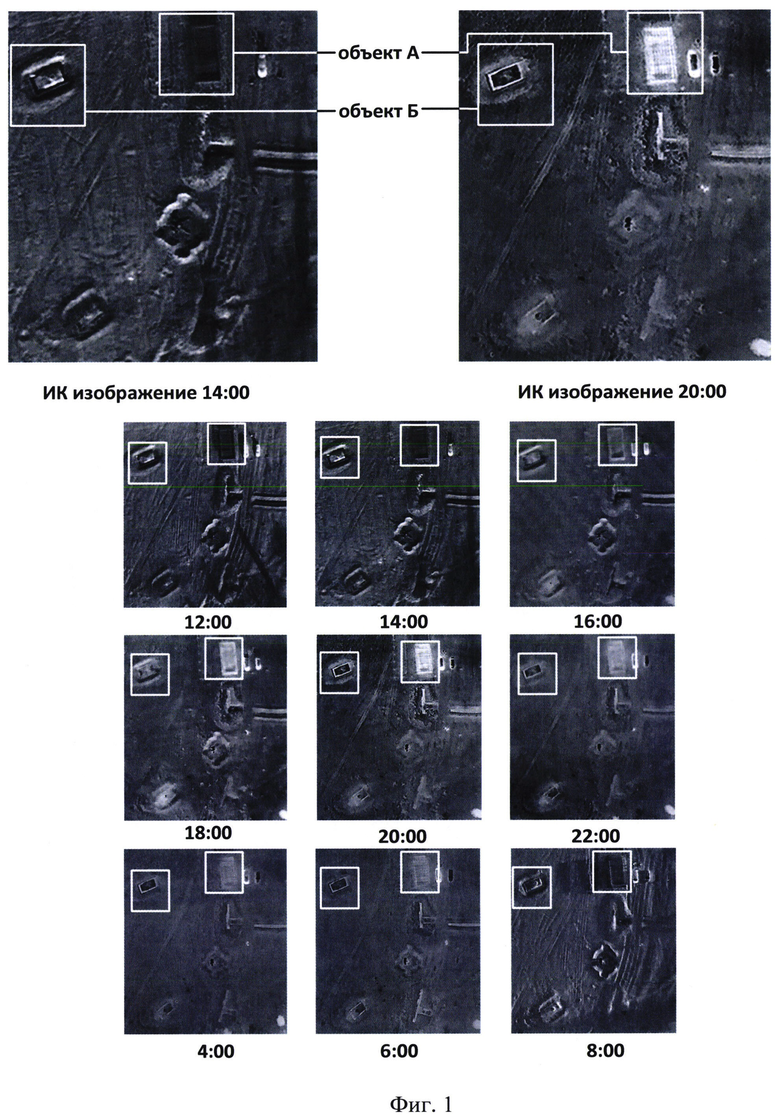
Способ навигации беспилотных летательных аппаратов, заключающийся в получении эталонных и рабочих изображений земной поверхности, подвергнутых пороговой обработке с получением множества опорных точек - контуров и оценкой данных максимума двумерной взаимокорреляционной функции, отличающийся тем, что эталонные и рабочие изображения получают с помощью оптико-электронных систем в инфракрасном диапазоне, эталонные изображения подготавливают на основе тепловой модели местности путем решения прямой задачи радиационного теплопереноса с учетом плотности потока падающего солнечного излучения, температуры воздуха и высоты полета для заданных участков местности траектории полета и соответствующих периодов астрономического времени, рабочие изображения получают в процессе съемки в инфракрасном диапазоне в надир, производят пороговую обработку эталонных и рабочих инфракрасных изображений, получают эталонные и рабочие матрицы опорных точек - контуров объектов, осуществляют расчет двумерной матрицы взаимокорреляционной функции, находят максимум взаимокорреляционной функции, оценивают географическое положение максимума взаимокорреляционной функции по эталонной матрице опорных точек - контуров и используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотных летательных аппаратов по данным измеренных значений курса, крена, тангажа и высоты беспилотного летательного аппарата.
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| Способ дистанционного определения пространственного распределения теплофизических параметров поверхности земли | 2016 |
|
RU2659461C2 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА РЕЛЬЕФА МЕСТНОСТИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2014 |
|
RU2571845C1 |
| US 20170291301 A1, 12.10.2017. | |||

