Изобретение относится к пространственным манипуляторам параллельной структуры и может быть использовано в автоматических линиях и робототехнике для относительного смещения двух подвижных объектов в технологиях обработки, сборки или изготовления на ЗД принтере.
Известен пространственный манипулятор, содержащий опорное основание и приводную от трех двигателей подвижную платформу, шарнирно соединенные между собой через одинаковые подвижные стержневые опоры с тремя сферическими кинематическими парами для реализации трех движений выходного звена относительно опорного основания (схема в статье: Мирзаев Р.А. и др. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм) // Вестник Сибирского гос. аэрокосмического ун-та, 2012. Вып. 4, с. 46-50, рис. 1 (схема), рис. 4 (рабочая зона) - аналог.
Недостатками указанного пространственного манипулятора являются сложность конструкции и системы управления двигателями и их связанной кинематикой, а также узкая рабочая зона (в форме конуса на рис. 4 статьи Мирзаева Р.А.) из-за ограниченного до трех числа степеней свободы манипулятора.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является платформенный манипулятор относительного манипулирования, содержащий опорное основание и расположенное на нем многозвенное приводное платформенное устройство для относительного смещения между собой двух подвижных объектов, выполненное в виде установленных на опорном основании рычажных платформенных механизмов, каждый для привода одной подвижной платформы, которая кинематически связана с опорным основанием через замкнутую кинематическую цепь, содержащую сферические кинематические пары и вращательные кинематические пары с пересекающимися осями углового поворота, а также с осями, расположенными перпендикулярно к плоскости упомянутой подвижной платформы (схема приводного платформенного устройства манипулятора с шестью степенями свободы в статье Богус З.Р. и др. «Обзор механизмов с параллельной кинематикой» // Научные труды КубГТУ, №10, 2016 год, с. 95, рис. 12) - прототип.
Недостатками указанного манипулятора относительного манипулирования являются:
1. Сложная конструкция и высокая трудоемкость изготовления пересекающихся вращательных пар и шести сложных сферических пар с точным пересечением только в одной точке всех трех пространственных осей для всех внутренних и наружных сферических поверхностей (US Patent No. 4,628,765/1986).
2. Ограниченные эксплуатационные характеристики из-за невозможности одновременной пространственной обработки или сборки изделия сразу с двух его сторон.
3. Низкая жесткость, грузоподъемность и точность относительного позиционирования из-за выполнения замкнутой кинематической цепи манипулятора с податливыми под нагрузками замкнутыми контурами.
4. Сложная система управления манипулятором из-за кинематической зависимости движения подвижной платформы.
5. Ограниченное (малыми допускаемыми углами поворота сферических шарниров) рабочее пространство манипулятора.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции манипулятора относительного манипулятора и системы его управления, а также расширении его рабочего пространства и технологических возможностей за счет раздельного вращения вокруг параллельных осей и возможности одновременной пространственной обработки изделия сразу с двух его сторон.
Получение технического результата достигается за счет того, что предлагаемый платформенный V-манипулятор относительного манипулирования содержит опорное основание и расположенное на нем многозвенное приводное платформенное устройство для относительного смещения между собой двух подвижных объектов, выполненное в виде двойного комплекта попарно установленных между собой подвижных платформ, которые кинематически связаны между собой посредством вращательных кинематических пар с параллельными осями углового поворота, расположенными в плоскости упомянутых подвижных платформ, и образуют замкнутую кинематическую цепь с изменяемыми замкнутыми контурами на основе двухшарнирных звеньев.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2 и фиг. 3.
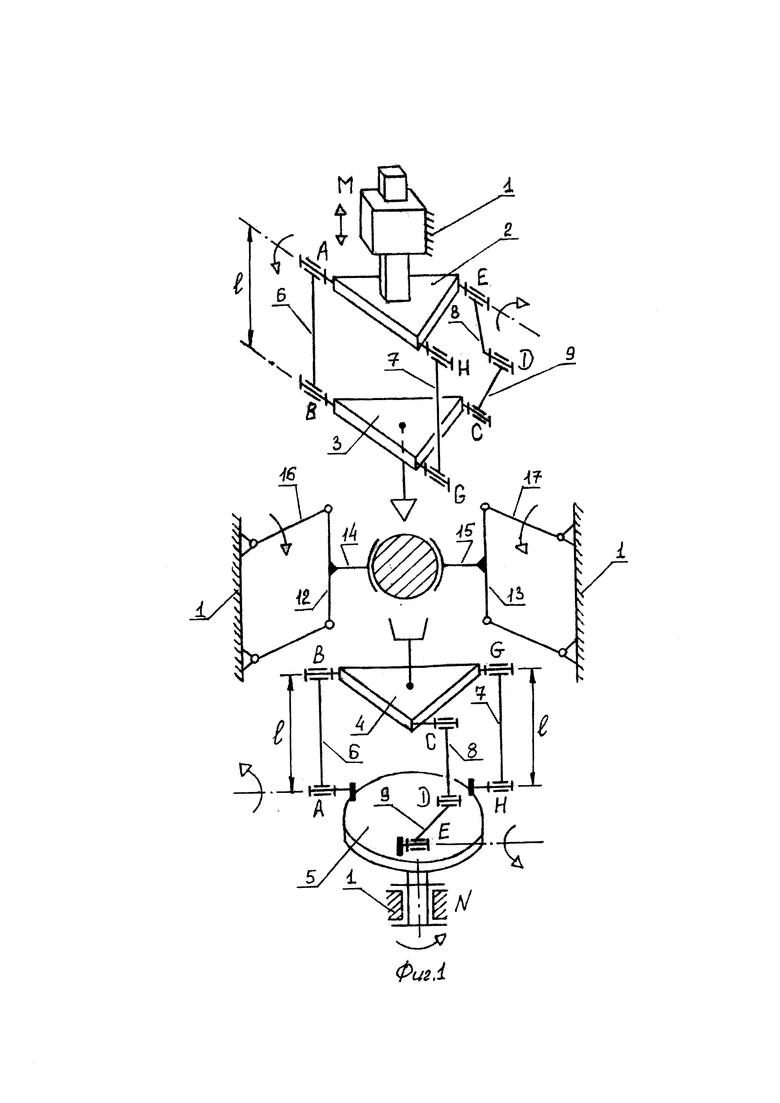
На фиг. 1 изображен общий вид платформенного V-манипулятора относительного манипулирования, содержащего опорное основание 1 и расположенное на нем многозвенное приводное платформенное устройство для относительного смещения между собой двух подвижных объектов, выполненное в виде двойного комплекта попарно установленных между собой подвижных платформ 2 и 3, а также подвижных платформ 4 и 5, которые кинематически связаны между собой посредством вращательных кинематических пар с параллельными осями углового поворота, расположенными в плоскости упомянутых подвижных платформ 2, 3, 4 и 5, и образуют замкнутую кинематическую цепь с изменяемыми замкнутыми контурами. Например, такая кинематическая цепь, включающая попарно установленные подвижные платформы 2 и 3, содержит два пятисторонних замкнутых контура ABCDE и EDCGH.
В каждой паре подвижных платформ 2 и 3, а также 4 и 5 эти платформы соединены между собой тремя подвижными стержневыми опорами, две из которых выполнены в виде двухшарнирных звеньев 6 и 7 с одинаковым расстоянием  между расположенными на их концах цилиндрическими шарнирами А и В, а также G и Н; третья подвижная стержневая опора представляет соединение двух звеньев 8 и 9 через одноподвижную кинематическую пару в виде цилиндрического шарнира D.
между расположенными на их концах цилиндрическими шарнирами А и В, а также G и Н; третья подвижная стержневая опора представляет соединение двух звеньев 8 и 9 через одноподвижную кинематическую пару в виде цилиндрического шарнира D.
В одном комплекте из попарно установленных платформ 4 и 5 подвижная платформа 2 выполнена в виде поворотной платформы и соединена с опорным основанием 1 через вращательную приводную кинематическую пару N, а в другом комплекте из попарно установленных платформ 2 и 3 подвижная платформа 2 соединена с опорным основанием 1 через поступательную приводную кинематическую пару М, которая может быть выполнена в виде линейного двигателя.
В замкнутой кинематической цепи, содержащей три подвижных стержневых опоры между попарно установленными подвижными платформами 2 и 3, 4 и 5, двухшарнирное звено 6 содержит одну приводную вращательную пару А, а другое двухшарнирное звено 9 содержит вторую приводную вращательную пару Е.
На выходной подвижной платформе 3 может быть установлен один рабочий орган, а на другой выходной подвижной платформе 4 может быть установлен второй рабочий или обрабатываемая деталь.
Представленный на фиг. 1 вариант платформенного V-манипулятора имеет шесть степеней свободы в относительном движении платформ 3 и 4 с рабочими органами, что обеспечивает управляемую раздельную кинематику всех возможных в рабочем пространстве трех вращательных и трех поступательных координационных движений двух рабочих органов в прямоугольной системе координат «х - у - z».
В представленном на фиг. 1 варианту выполнения платформенного V-манипулятора относительного манипулирования многозвенное приводное платформенное устройство сблокировано с рычажным зажимным устройством, выполненным в виде двух дополнительных встречно установленных на опорном основании 1 параллелограммных механизмов (с расположенными на их шатунах 12 и 13 зажимными элементами 14 и 15), обеспечивающих при встречном повороте кривошипов 16 и 17 упомянутых параллелограммных механизмов пространственный зажим объекта для его двухсторонней одновременной обработки в рабочем пространстве относительного манипулирования без поворота этого объекта на 180 градусов.
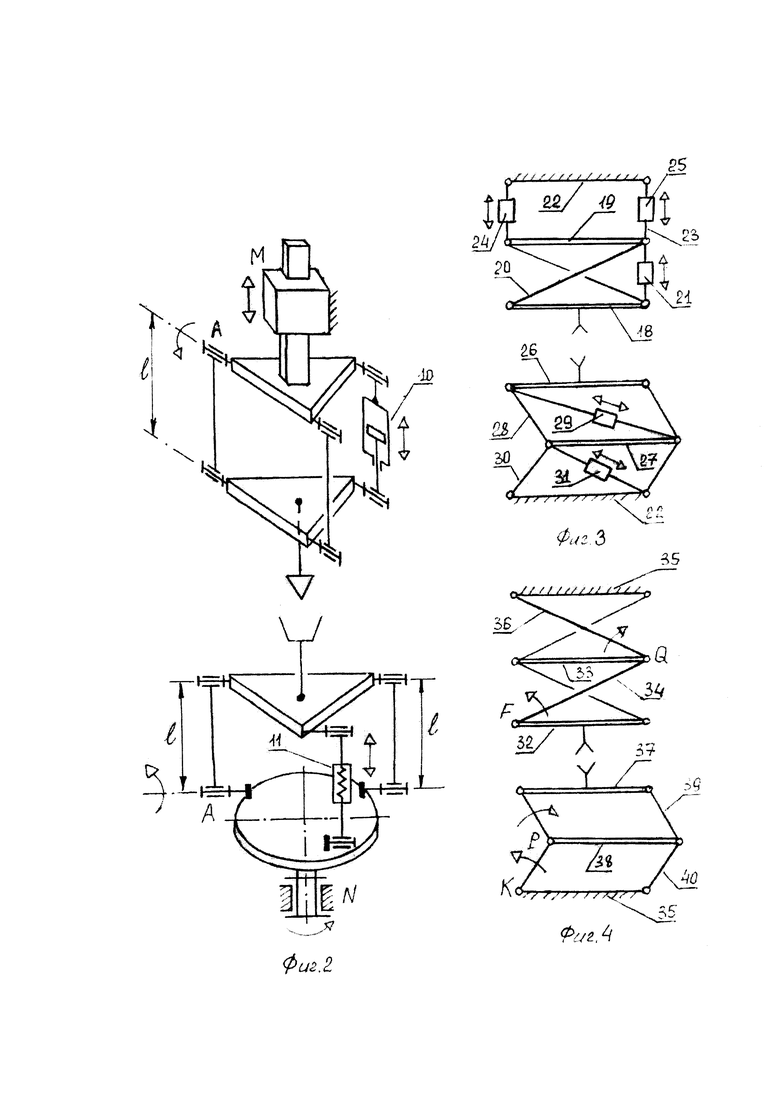
На фиг. 2 представлен вариант выполнения многозвенного приводного платформенного устройства V-манипулятора с приводом стержневой подвижной опоры через поступательную кинематическую пару, которая может быть выполнена в виде подвижного гидроцилиндра 10 или винтового одноподвижного соединения 11.
На фиг. 3 представлен вариант выполнения платформенного V-манипулятора с 5 степенями свободы рабочих органов, в котором в одном комплекте двух подвижных платформ 18 и 19 кинематическая связь между ними выполнена в виде антипараллелограммного механизма 20 с приводной поступательной кинематической парой 21, в подвижная платформа 19 образует с опорным основанием 22 рычажный механизм 23 с двумя приводными поступательными парами 24 и 25. В другом комплекте двух подвижных платформ 26 и 27 кинематическая связь между ними выполнена в виде параллелограммного механизма 28 с установленной на его диагонали приводной поступательной кинематической парой 29, а подвижная платформа 27 образует с опорным основанием 22 аналогичный второй параллелограммный механизм 30 с установленной на его диагонали второй приводной поступательной парой 31.
На фиг. 4 представлен вариант выполнения платформенного V-манипулятора относительного манипулирования, в котором в одном комплекте двух подвижных платформ 32 и 33 кинематическая связь между ними выполнена в виде антипараллелограммного механизма 34 с приводной вращательной кинематической парой F, а подвижная платформа 33 образует с опорным основанием 35 второй антипараллелограммный механизм 36 с приводной вращательной кинематической парой Q. В другом комплекте двух подвижных платформ 37 и 38 кинематическая связь между ними выполнена в виде параллелограммного механизма 39 с приводной вращательной кинематической парой Р, а подвижная платформа 38 образует с опорным основанием 35 аналогичный второй параллелограммный механизм 40 с приводной вращательной кинематической парой К. Данный V-манипулятор имеет 4 степени свободы.
Работа представленного платформенного V-манипулятора относительного манипулирования заключается в следующем.
Раздельное включение приводов каждой из указанных приводных кинематических пар обеспечивает раздельную кинематику относительных движений выходных подвижных платформ 3 и 5, включающих их вращение вокруг параллельных осей, поступательное и вращательное движение с заданной постоянной ориентацией исполнительных органов во всем рабочем пространстве манипулятора с увеличенным до восьми числом степеней свободы (с учетом двух степеней свободы пространственного зажимного устройства).
Достигаемый в предлагаемом платформенном V-манипуляторе относительного манипулирования положительный эффект заключается в следующем:
1. Упрощение конструкции манипулятора за счет применения всех вращательных кинематических пар с параллельными осями поворота.
2. Упрощение системы управления и повышение точности относительного позиционирования за счет раздельной кинематики всех выходных звеньев.
3. Расширение рабочей зоны относительного манипулирования за счет увеличения до восьми числа степеней свободы манипулятора (с учетом двух степеней свободы пространственного параллелограммного зажимного устройства).
4. Возможность пространственной обработки и сборки сложного изделия одновременно с двух сторон и без поворота для этого данного изделия на 180 градусов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
Изобретение относится к области пространственных манипуляторов с параллельной структурой и может быть использовано, например, в автоматических линиях для относительного смещения двух объектов в процессе обработки или сборки. Манипулятор содержит опорное основание и расположенные на нем два комплекта из попарно связанных между собой подвижных платформ, которые кинематически связаны между собой посредством двухшарнирных звеньев с вращательными кинематическими парами, имеющими параллельные оси углового поворота. При этом упомянутые оси углового поворота расположены в плоскости соответствующих подвижных платформ, а упомянутые платформы и звенья установлены с образованием замкнутой кинематической цепи с изменяемыми замкнутыми контурами, причем одна из подвижных платформ каждого комплекта установлена на опорном основании, а на другой – выходной подвижной платформе каждого комплекта, установлен соответствующий рабочий орган. Использование изобретения позволяет повысить точность позиционирования объектов манипулирования и расширить технологические возможности манипулятора. 6 з.п. ф-лы, 4 ил.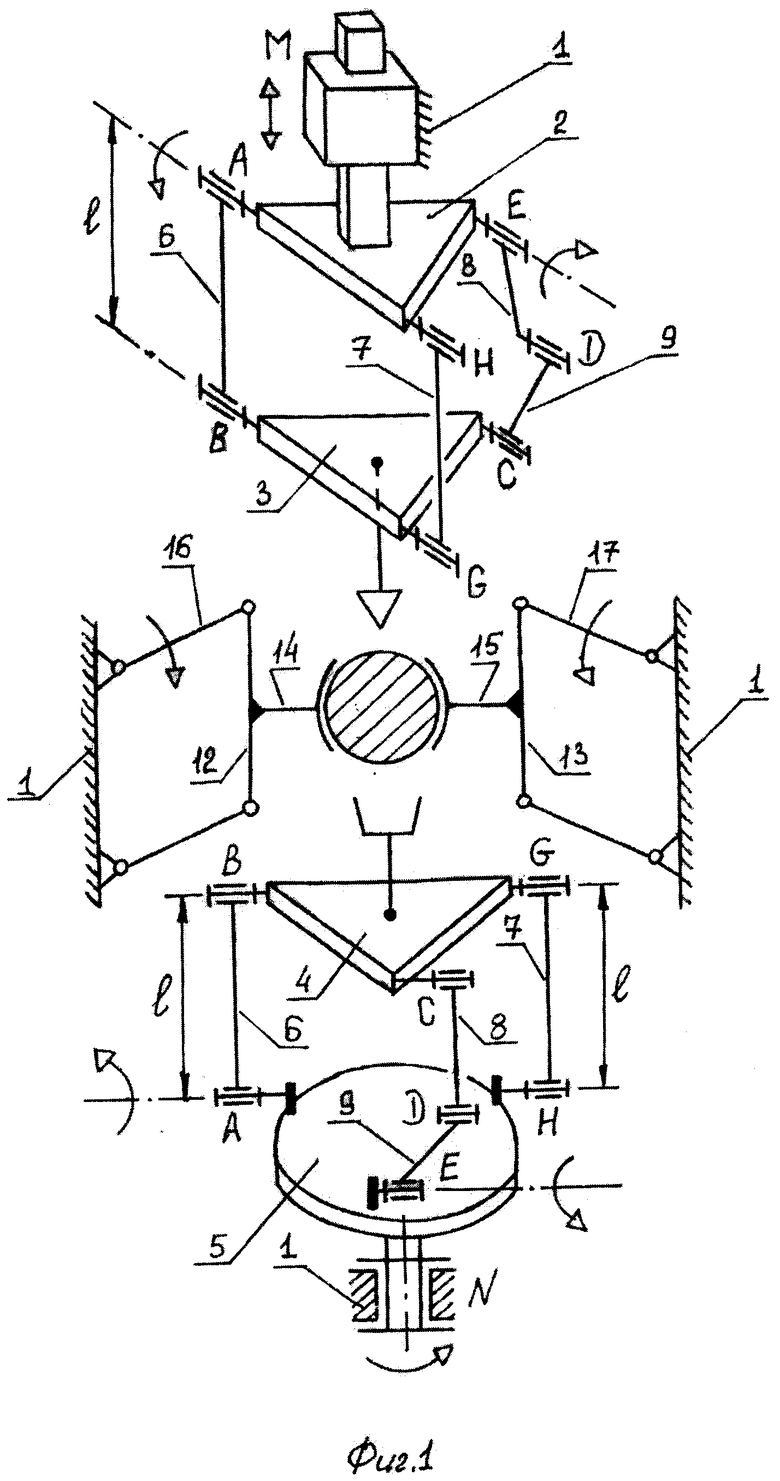
1. Платформенный манипулятор, содержащий опорное основание и расположенные на нем два комплекта из попарно связанных между собой подвижных платформ, которые кинематически связаны между собой посредством двухшарнирных звеньев с вращательными кинематическими парами, имеющими параллельные оси углового поворота, отличающийся тем, что упомянутые оси углового поворота расположены в плоскости соответствующих подвижных платформ, а упомянутые платформы и звенья установлены с образованием замкнутой кинематической цепи с изменяемыми замкнутыми контурами, при этом одна из подвижных платформ каждого комплекта установлена на опорном основании, а на другой – выходной подвижной платформе каждого комплекта, установлен соответствующий рабочий орган.
2. Платформенный манипулятор по п. 1, отличающийся тем, что упомянутые двухшарнирные звенья выполнены в количестве трех в виде подвижных стержневых опор, две из которых имеют одинаковое расстояние между расположенными на их концах цилиндрическими шарнирами и снабжены одной приводной вращательной парой, а третья подвижная стержневая опора выполнена составной из двух шарнирно-сочлененных двухшарнирных звеньев, одно из которых снабжено второй приводной вращательной или винтовой парой.
3. Платформенный манипулятор по п. 1, отличающийся тем, что упомянутые двухшарнирные звенья выполнены в количестве трех в виде подвижных стержневых опор, две из которых имеют одинаковое расстояние между расположенными на их концах цилиндрическими шарнирами, а третья подвижная стержневая опора выполнена в виде соединенных между собой через поступательную приводную кинематическую пару двух звеньев, которая выполнена в виде подвижного гидроцилиндра или винтового одноподвижного соединения.
4. Платформенный манипулятор по п. 1, отличающийся тем, что установленная на опорном основании подвижная платформа одного из комплектов выполнена в виде поворотной платформы и соединена с опорным основанием через вращательную приводную кинематическую пару с возможностью углового ориентирования соответствующего рабочего органа, а установленная на опорном основании подвижная платформа другого комплекта соединена с опорным основанием через поступательную приводную кинематическую пару, выполненную, например, в виде линейного двигателя с возможностью поступательного ориентирования соответствующего рабочего органа.
5. Платформенный манипулятор по любому из пп. 1-4, отличающийся тем, что он снабжен рычажным зажимным устройством, выполненным в виде двух установленных на опорном основании дополнительных параллелограммных механизмов с зажимными элементами, встречно расположенными на их шатунах с возможностью зажима обрабатываемого объекта.
6. Платформенный манипулятор по п. 1, отличающийся тем, что упомянутые двухшарнирные звенья одного из комплектов подвижных платформ установлены с образованием антипараллелограммного механизма с приводной поступательной кинематической парой, а установленная на опорном основании подвижная платформа этого комплекта связана с ним посредством рычажного механизма с двумя приводными поступательными кинематическими парами, при этом упомянутые двухшарнирные звенья другого комплекта подвижных платформ установлены с образованием параллелограммного механизма с размещенной по его диагонали приводной поступательной кинематической парой, а установленная на опорном основании подвижная платформа этого комплекта связана с ним посредством второго параллелограммного механизма с установленной по его диагонали второй приводной поступательной парой.
7. Платформенный манипулятор по п. 1, отличающийся тем, что упомянутые двухшарнирные звенья одного из комплектов подвижных платформ установлены с образованием антипараллелограммного механизма с приводной вращательной кинематической парой, а установленная на опорном основании подвижная платформа этого комплекта связана с ним посредством второго антипараллелограммного механизма с приводной вращательной кинематической парой, при этом упомянутые двухшарнирные звенья другого комплекта подвижных платформ установлены с образованием параллелограммного механизма с приводной вращательной кинематической парой, а установленная на опорном основании подвижная платформа этого комплекта связана с ним посредством второго параллелограммного механизма с приводной вращательной кинематической парой.
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| US 4628765 A, 16.12.1986 | |||
| US 6729202 B2, 04.05.2004. | |||

