Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена.
Известен механизм Робертса [Garoi F., Winterflood J., Ju L., Jacob J., Blair D.G. Passive vibration isolation using a Roberts linkage. Review of scientific instruments, Vol. 74, No. 7, 2003, pp. 3487-3491, Fig. 1a], включающий неподвижное звено (стойку), ведущее звено, выходное звено в виде треугольного шатуна и коромысло. Все звенья механизма соединены между собой вращательными шарнирами. Механизм реализует прямолинейное смещение выходной точки шатуна на некотором участке. Недостатком такого механизма является невозможность цикличного движения выходного звена в связи с тем, что ведущее звено не делает полного оборота на 360 градусов. Этот недостаток ограничивает область применения данного механизма.
Наиболее близким к предлагаемому устройству является рычажный механизм [J.В.  de mecanismo de locomocion andante con cambio de direccion. Grado de Ingenieria en Diseno Mecanico, 2016, 81 p.; Figures 21, 22], включающий стойку, кривошип, шатуны и коромысла, соединенные между собой вращательными шарнирами, причем одно из коромысел выполнено в виде четырехугольного звена. Входное движение в механизме задается кривошипу.
de mecanismo de locomocion andante con cambio de direccion. Grado de Ingenieria en Diseno Mecanico, 2016, 81 p.; Figures 21, 22], включающий стойку, кривошип, шатуны и коромысла, соединенные между собой вращательными шарнирами, причем одно из коромысел выполнено в виде четырехугольного звена. Входное движение в механизме задается кривошипу.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в том, что выходная точка в нем расположена на шарнире между двух шатунов (точка G между шатунами EG и FG на Figure 21). При использовании данного механизма в качестве ноги шагающего устройства контакт с поверхностью происходит через указанный шарнир, это способствует износу материала в области шарнира и ведет к дальнейшей вынужденной замене шатунов EG и FG. При применении механизма прототипа в качестве направляющего устройства отсутствует возможность жесткой установки какого-либо инструмента, например, резца, схвата или лазера, в месте выходной точки в связи с тем, что она расположена в области шарнира. Кроме этого стойка имеет небольшую длину относительно всего габарита механизма. Этот недостаток снижает надежность при передаче движений между звеньями механизма и его жесткость.
Техническая проблема, решаемая предлагаемым изобретением, заключается в расширении технологических возможностей и усовершенствовании конструкции прототипа путем введения в его состав дополнительных звеньев с целью обеспечения расположения выходной точки не на шарнире, а на звене для обеспечения жесткой установки какого-либо инструмента, а также увеличивающих жесткость всего механизма. При этом траектория движения выходной точки предлагаемого механизма соответствует траектории движения выходной точки прототипа. Кроме этого предлагаемым изобретением решается проблема по воспроизведению отличающихся траекторий движения выходного элемента при неизменной структуре механизма.
Данная проблема решается тем, что в предлагаемом рычажном прямолинейно-направляющем механизме, включающем стойку, кривошип, основные шатуны и коромысла, соединенные между собой вращательными шарнирами, причем одно из коромысел выполнено четырехугольным, согласно изобретению механизм снабжен двумя дополнительными двухзвенными кинематическими цепями, каждая из которых включает шатун и коромысло, при этом одна кинематическая цепь образована тремя вращательными шарнирами и сопряжена со стойкой и четырехугольным коромыслом, а другая - образована двумя вращательными и одним поступательным шарнирами и сопряжена со стойкой и с одним из основных шатунов, причем шатун этой кинематической цепи имеет удлиненный участок, выходящий за контур механизма, при этом кривошип и основные шатуны механизма выполнены раздвижными с возможностью изменения их длин.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении возможности жесткой установки выходного элемента и повышении жесткости всего механизма. Предлагаемое изобретение также позволяет воспроизводить разные траектории движения выходного элемента при неизменной структуре механизма за счет выполнения основных шатунов раздвижными. Таким образом, при использовании одного и того же механизма появляется возможность реализации разных законов движения выходного звена. Соответственно, разные технологические операции могут быть выполнены с применением одного и того же механизма.
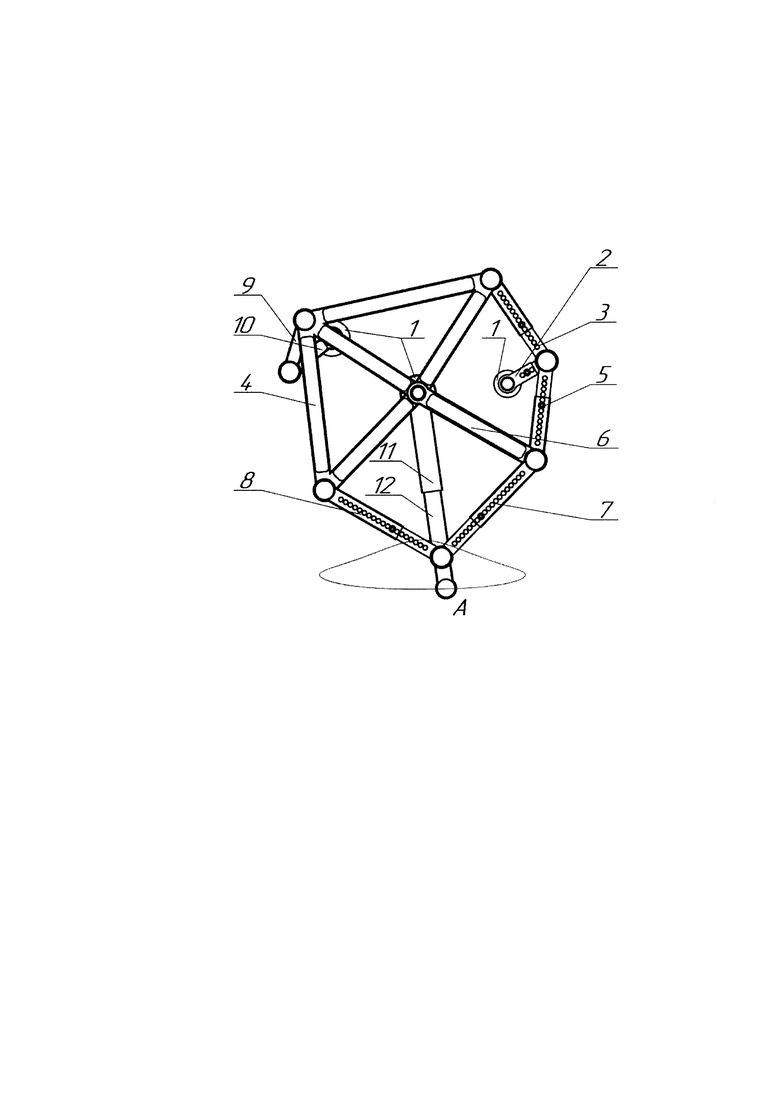
Предлагаемое изобретение поясняется чертежом, где показан предлагаемый рычажный прямолинейно-направляющий механизм с воспроизводимой траекторией движения выходного звена.
Механизм состоит из стойки 1, кривошипа 2, шатунов 3, 5, 7, 8, 9 и 12 (выходное звено), коромысла 4, выполненного в виде четырехугольного звена и коромысел 6, 10 и 11. Все шарниры механизма выполнены вращательными, кроме шарнира между звеньями 11 и 12, который выполнен поступательным. Выходной точкой в механизме является точка А, принадлежащая шатуну 12. Для получения разных траекторий движения выходного звена, кривошип 2 и основные шатуны 3, 5, 7 и 8 выполнены раздвижными, т.е. с возможностью изменения их длины. Механизм является одноподвижным, в нем движение задается единственному звену, кривошипу 2. При этом все остальные звенья движутся определенно, по предписанным траекториям.
Принцип работы предлагаемого механизма заключается в следующем. При вращении кривошипа 2, шатуны 3 и 5 приводятся в движения. От них движение передается шатунам 7 и 8 через коромысла 6 и 4, которые приводят в движение выходное звено 12. Шатун 9 и коромысло 10, установленные между четырехугольным коромыслом 4 и стойкой 1, обеспечивают механизму дополнительную жесткость.
Предлагаемое изобретение может быть использовано для выполнения различных технологических операций, например, применяться в качестве ноги шагающей машины, либо использоваться в системах прямолинейно-направляющих устройств, где требуется реализовать движение на некотором участке вдоль прямой линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ ВЫХОДНЫМИ ЗВЕНЬЯМИ | 2018 |
|
RU2677948C1 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| МЕХАНИЗМ ПОССЕЛЬЕ-ЛИПКИНА С ВЫХОДНЫМ РАБОЧИМ ЗВЕНОМ | 2020 |
|
RU2750344C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| МЕХАНИЗМ ПОСЕЛЬЕ-ЛИПКИНА С КУЛИСНЫМ РЫЧАГОМ | 2013 |
|
RU2527642C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| Шарнирно-рычажный механизм | 1989 |
|
SU1696796A1 |
Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена. Рычажный прямолинейно-направляющий механизм включает стойку, кривошип, основные шатуны и коромысла, соединенные между собой вращательными шарнирами, причем одно из коромысел выполнено четырехугольным. Механизм снабжен двумя дополнительными двухзвенными кинематическими цепями, каждая из которых включает шатун и коромысло, при этом одна кинематическая цепь образована тремя вращательными шарнирами и сопряжена со стойкой и четырехугольным коромыслом, а другая образована двумя вращательными и одним поступательным шарнирами и сопряжена со стойкой и с одним из основных шатунов. Шатун этой кинематической цепи имеет удлиненный участок, выходящий за контур механизма, при этом кривошип и основные шатуны механизма выполнены раздвижными с возможностью изменения их длин. Обеспечивается расширение технологических возможностей и усовершенствование конструкции механизма. 1 ил.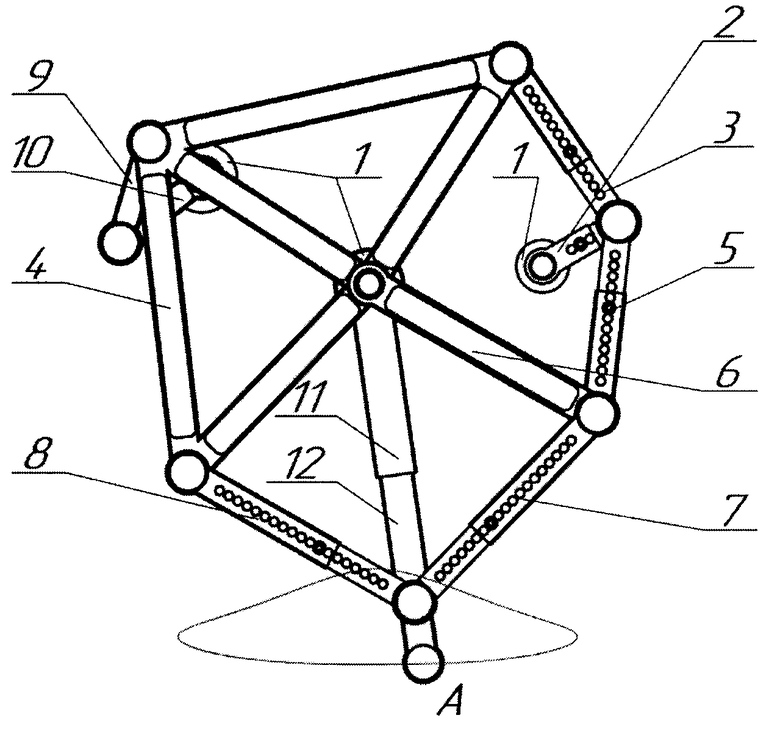
Рычажный прямолинейно-направляющий механизм, включающий стойку, кривошип, основные шатуны и коромысла, соединенные между собой вращательными шарнирами, причем одно из коромысел выполнено четырехугольным, отличающийся тем, что механизм снабжен двумя дополнительными двухзвенными кинематическими цепями, каждая из которых включает шатун и коромысло, при этом одна кинематическая цепь образована тремя вращательными шарнирами и сопряжена со стойкой и четырехугольным коромыслом, а другая образована двумя вращательными и одним поступательным шарнирами и сопряжена со стойкой и с одним из основных шатунов, причем шатун этой кинематической цепи имеет удлиненный участок, выходящий за контур механизма, при этом кривошип и основные шатуны механизма выполнены раздвижными с возможностью изменения их длин.
| ТРАНСПОРТНОЕ СРЕДСТВО | 0 |
|
SU368094A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| US 10126757 B2, 13.11.2018. | |||

