Изобретение относится к рычажным регулируемым механизмам и может быть использовано в машиностроении, роботах и манипуляторах.
Известен пространственный механизм с шестью степенями свободы (авт. св. СССР 1668784, кл. F 16 Н 21/46, В 25 J 1/00, 1991, бюл. 29), содержащий основание, выходное звено, связывающие их три кинематические цепи, каждая из которой выполнена в виде двух, трех или четырех стержней, последовательно связанных между собой посредством двухподвижных сферических шарниров. Каждая кинематическая цепь посредством сферических шарниров связана с двумя вращательными приводами, которые обеспечивают поворот одного стержня цепи относительно двух взаимно перпендикулярных осей, лежащих в плоскости, параллельной основанию.
Недостатком механизма является то, что выходное звено расположено в одной плоскости, в связи с чем перемещение выходного звена возможно только плоскопараллельное, движение выходного звена в трехмерном пространстве отсутствует.
Наиболее близким аналогом к изобретению является манипулятор (авт. св. СССР, 1315290, кл. В 25 J 1/02, 9/20, 1987, бюл. 21) содержащий основание, шесть приводных звеньев, три из которых выполнены в виде кареток, размещенных на кольцевой направляющей, установленной на основании, остальные три привода выполнены в виде силовых гидроцилиндров, одними концами соединенных посредством цилиндрических пар с каретками, а другими - посредством сферических пар с ведомым звеном в виде треугольного рычага. При воздействии на приводы кареток происходит перемещение их по кольцевой направляющей, в результате чего изменяются положения гидроцилиндров, связанных с каретками. При силовом воздействии на гидроцилиндры происходит изменение положения ведомого звена. Одновременное воздействие на все шесть приводных звеньев обеспечивает плоскопараллельное движение ведомого звена.
Недостатком данного механизма является то, что он по своей конструкции громоздкий, ввиду наличия трех кареток с приводами и кольцевой направляющей. Кроме того, движение ведомого звена является плоскопараллельным и отсутствует движение ведомого звена по кривой линии, т.е. отсутствует движение механизма во взаимно перпендикулярных осях трехмерного пространства.
Задача изобретения состоит в создании пространственного рычажного регулируемого механизма, расположенного на взаимно перпендикулярных осях трехмерного пространства, обеспечивающего движение рабочей точки ведомого звена (исполнительного органа) по криволинейной траектории, а также плоскопараллельное движение.
Для этого пространственный рычажный регулируемый механизм, содержащий основание, приводные звенья, ведомое звено, выполненное в виде треугольного рычага, гидроцилиндр, связанные посредством одноподвижных шарниров и трехподвижных сферических шарниров, согласно изобретению содержит три приводных звена, одно из которых расположено на одной из осей трехмерного пространства и одноподвижным шарниром связано с треугольной платформой, две стороны которой соответствуют взаимно перпендикулярным осям трехмерного пространства и одноподвижными шарнирами соединены с двумя другими приводными звеньями, имеющими возможность фиксированного положения и соединенными одноподвижными шарнирами с шатунами, выполненными в виде треугольных рычагов, причем оси одноподвижных шарниров, соединяющих одно из двух указанных приводных звеньев с соответствующим шатуном и платформой, параллельны между собой и расположены перпендикулярно к параллельным осям одноподвижных шарниров, соединяющих второе из двух указанных приводных звеньев с соответствующим шатуном и платформой, при этом шатуны связаны между собой ведомым звеном и дополнительными рычагами посредством двуподвижных и трехподвижных сферических шарниров, при этом гидроцилиндр имеет возможность фиксированного положения и связан трехподвижными сферическими шарнирами с дополнительными рычагами и платформой.
На чертеже представлен пространственный рычажный регулируемый механизм.
Механизм содержит основание 1, с которым одноподвижным шарниром 2 соединено приводное звено 3, расположенное на одной из осей трехмерного пространства и через одноподвижный шарнир 4 связанное с треугольной платформой 5. Две стороны платформы 5 расположены так, что соответствуют взаимно перпендикулярным осям трехмерного пространства и одноподвижными шарнирами 6, 7 соединены с приводными звеньями 8, 9, имеющими возможность фиксированного положения. Трехподвижный сферический шарнир 10 соединяет платформу 5 с гидроцилиндром 11, имеющим возможность фиксированного положения, а приводные звенья 8, 9, соответственно одноподвижными шарнирами 12, 13 соединены с шатунами 14, 15, которые выполнены в виде треугольных рычагов и связаны между собой посредством двухподвижных 16, 17, 18 и трехподвижных 19, 20 сферических шарниров ведомым звеном 21 (исполнительный орган), выполненным в виде треугольного рычага, и дополнительными рычагами 22, 23. Гидроцилиндр 11 посредством трехподвижного сферического шарнира 19 связан с дополнительными рычагами 22, 23. Оси одноподвижных шарниров 6 и 12 параллельны между собой и расположены перпендикулярно к осям одноподвижных шарниров 7 и 13, которые также параллельны между собой.
Механизм работает следующим образом.
При воздействии на приводное звено 3 платформа 5 совершает вращение вокруг оси шарнира 4. Через шарниры 6, 7 движение передается приводным звеньям 8, 9. При вращении приводного звена 8 вокруг шарнира 6 шатун 14 совершает движение в плоскости, перпендикулярной к оси шарнира 6, и одновременно, при вращении приводного звена 9 вокруг шарнира 7 шатун 15 совершает движение в плоскости, перпендикулярной к оси шарнира 7. Поскольку линия пересечения двух плоскостей есть прямая линия, то рабочая точка (Т), находящаяся на вершине ведомого звена (исполнительный орган) 21, при непрерывном движении приводных звеньев 3, 8, 9, расположенных на осях трехмерного пространства, совершает прямолинейно-поступательное движение вдоль линии пересечения двух плоскостей при фиксированном положении гидроцилиндра 11. При воздействии на гидроцилиндр 11 и фиксированном положении приводных звеньев 8, 9 происходит изменение положения замкнутой системы рычагов 14, 15, 21, 22, 23, представляющей собой группу Ассура V класса, при этом рабочая точка ведомого звена 21 описывает криволинейную траекторию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2008 |
|
RU2404385C2 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
Изобретение относится к пространственным рычажным регулируемым механизмам и может быть использовано в машиностроении, роботах и манипуляторах. Механизм содержит основание, платформу, расположенные на осях трехмерного пространства одинаковые приводные звенья. Звенья имеют возможность фиксированного положения, от них движение передается на замкнутую кинематическую систему, выполненную в виде группы Ассура V класса, рабочая точка которой совершает прямолинейно поступательное движение по линии пересечения двух плоскостей при непрерывном движении приводных звеньев с помощью установленного с возможностью фиксированного положения гидроцилиндра. Технический результат - создание пространственного рычажного регулируемого механизма, расположенного во взаимно перпендикулярных осях трехмерного пространства, обеспечивающего движение рабочей точки ведомого звена (исполнительного органа) по криволинейной траектории, а также плоскопараллельное движение. 1 ил.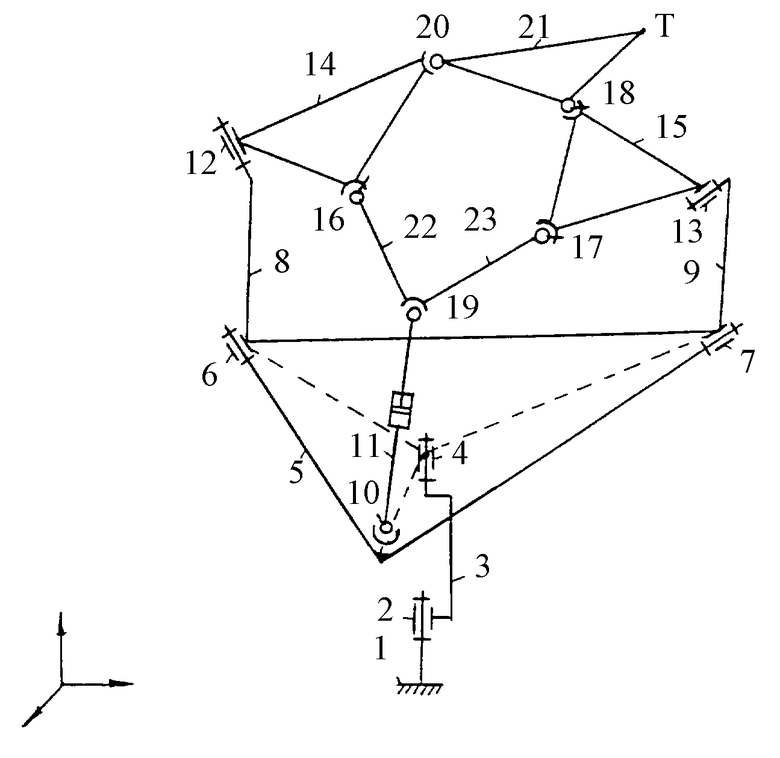
Пространственный рычажный регулируемый механизм, содержащий основание, приводные звенья, ведомое звено, выполненное в виде треугольного рычага, гидроцилиндр, связанные посредством одноподвижных шарниров и трехподвижных сферических шарниров, отличающийся тем, что он содержит три приводных звена, одно из которых расположено на одной из осей трехмерного пространства и одноподвижным шарниром связано с треугольной платформой, две стороны которой соответствуют взаимно перпендикулярным осям трехмерного пространства и одноподвижными шарнирами соединены с двумя другими приводными звеньями, имеющими возможность фиксированного положения и соединенными одноподвижными шарнирами с шатунами, выполненными в виде треугольных рычагов, причем оси одноподвижных шарниров, соединяющих одно из двух указанных приводных звеньев с соответствующим шатуном и платформой, параллельны между собой и расположены перпендикулярно параллельным осям одноподвижных шарниров, соединяющих второе из двух указанных приводных звеньев с соответствующим шатуном и платформой, при этом шатуны связаны между собой ведомым звеном и двумя дополнительными рычагами посредством двухподвижных и трехподвижных сферических шарниров, при этом гидроцилиндр имеет возможность фиксированного положения и связан трехподвижными сферическими шарнирами с дополнительными рычагами и платформой.
| Манипулятор | 1985 |
|
SU1315290A1 |
| ПРОСТРАНСТВЕННЫЙ СТЕРЖНЕВОЙ МЕХАНИЗМ | 1993 |
|
RU2085789C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕМЕЩЕНИЯ ЭЛЕМЕНТА В ПРОСТРАНСТВЕ | 1993 |
|
RU2092730C1 |
| DE 19701830 А1, 14.08.1997 | |||
| DE 19839366 А1, 02.03.2000 | |||
| US 3918317, 11.11.1975 | |||
| Питательная среда для выращивания микроорганизмов | 1974 |
|
SU485144A1 |
| GB 1488638, 12.10.1997. | |||

