Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу обнаружения объектов и к устройству обнаружения объектов, которые выполнены с возможностью обнаруживать объект вокруг транспортного средства.
Уровень техники
[0002] Предложена технология, применимая к устройству, выполненному с возможностью обнаруживать позицию движущегося впереди транспортного средства, расположенного впереди исходного транспортного средства, посредством использования множества датчиков, которое выполнено с возможностью определять результаты обнаружения позиций объектов посредством соответствующих датчиков в качестве идентичного (того же самого) движущегося впереди транспортного средства, когда результаты обнаружения позиций объектов по существу равны друг другу с точки зрения горизонтального направления и направления спереди назад (см. патентный документ 1). В случае если результаты обнаружения посредством соответствующих датчиков по существу равны друг другу с точки зрения горизонтального направления, но по существу не равны друг другу с точки зрения направления спереди назад, вышеописанное устройство определяет объект непрерывно в качестве идентичного движущегося впереди транспортного средства, когда скорости объекта, обнаруженного посредством соответствующих датчиков, по существу равны друг другу, и когда результаты обнаружения для объекта посредством соответствующих датчиков достигают определения того, что объект является идентичным движущимся впереди транспортным средством, в предыдущей обработке.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2004-347471
Сущность изобретения
Техническая задача
[0004] Тем не менее, если другое транспортное средство приближается к впереди идущему транспортному средству, обнаруженному посредством множества датчиков, например, другое приближающееся транспортное средство может ошибочно идентифицироваться в качестве объекта, идентичного впереди идущему транспортному средству, обнаруженному ранее. Таким образом, технология, описанная в патентном документе 1, может не иметь возможность непрерывно и корректно идентифицировать то, является или нет объект идентичным, из результатов обнаружения для множества объектов посредством множества датчиков.
[0005] С учетом вышеуказанной проблемы, задача настоящего изобретения заключается в этом, чтобы предоставлять способ обнаружения объектов и устройство обнаружения объектов, которые допускают идентификацию окружающего объекта с высокой точностью из результатов обнаружения объектов посредством множества датчиков.
Решение задачи
[0006] Когда множество объектов, обнаруженных посредством множества датчиков, определяются как идентичный объект, и затем позиция объекта одного объекта из множества объектов становится необнаруживаемой позднее, устройство обнаружения объектов определяет то, является ли непрерывно обнаруживаемый объект объектом идентичным объекту в предыдущей обработке, на основе прогнозного диапазона, вычисленного из ранее обнаруженной позиции объекта для объекта, становящегося необнаруживаемым, и на основе диапазона присутствия, оцененного из позиции объекта для непрерывно обнаруживаемого объекта.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно предоставлять способ обнаружения объектов и устройство обнаружения объектов, которые допускают идентификацию окружающего объекта с высокой точностью из результатов обнаружения объектов посредством множества датчиков посредством прогнозирования диапазона присутствия объекта из позиции объекта, обнаруженной ранее.
Краткое описание чертежей
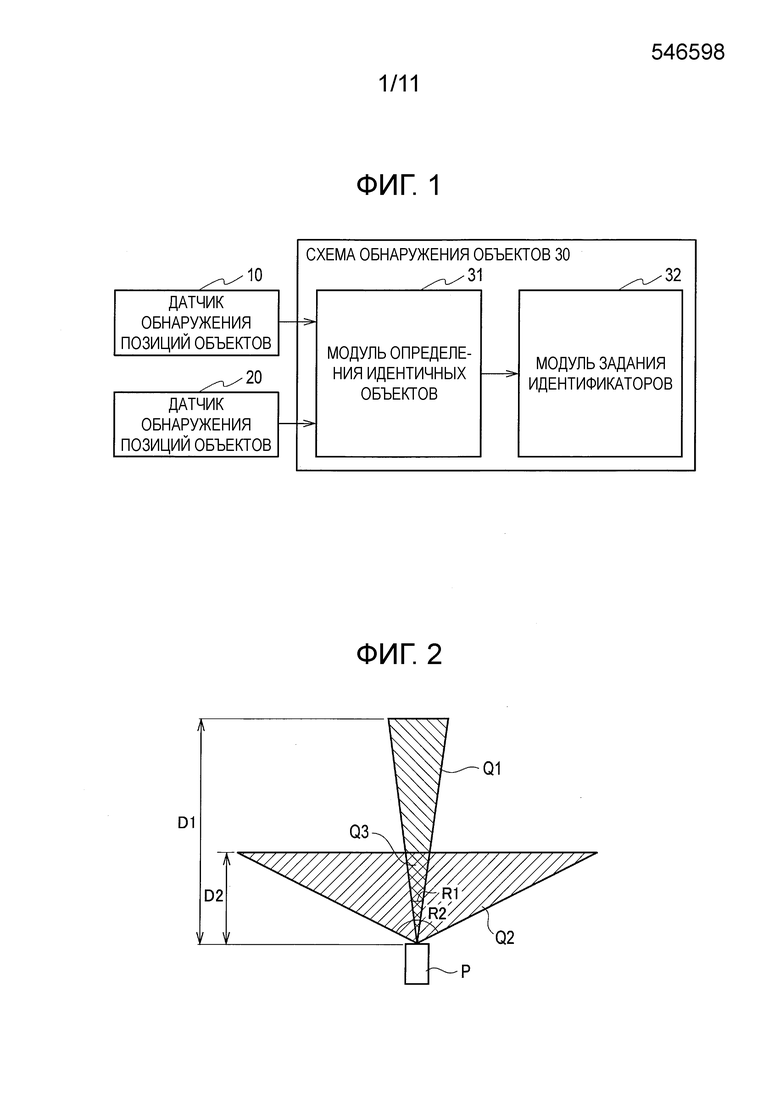
[0008] Фиг. 1 является принципиальной блок-схемой для пояснения базовой конфигурации устройства обнаружения объектов согласно первому варианту осуществления.
Фиг. 2 является схемой для пояснения областей обнаружения, обнаруживаемых посредством двух датчиков обнаружения позиций объектов, соответственно.
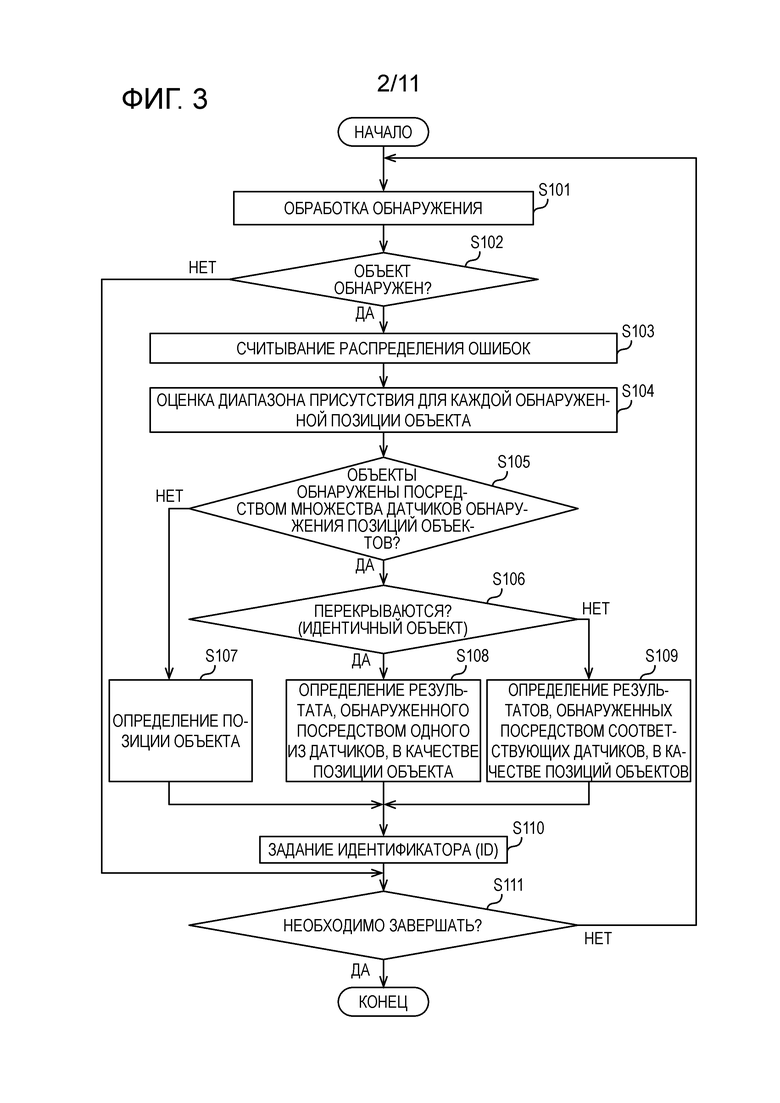
Фиг. 3 является блок-схемой последовательности операций для пояснения примера способа обнаружения объектов, осуществляемого посредством устройства обнаружения объектов согласно первому варианту осуществления.
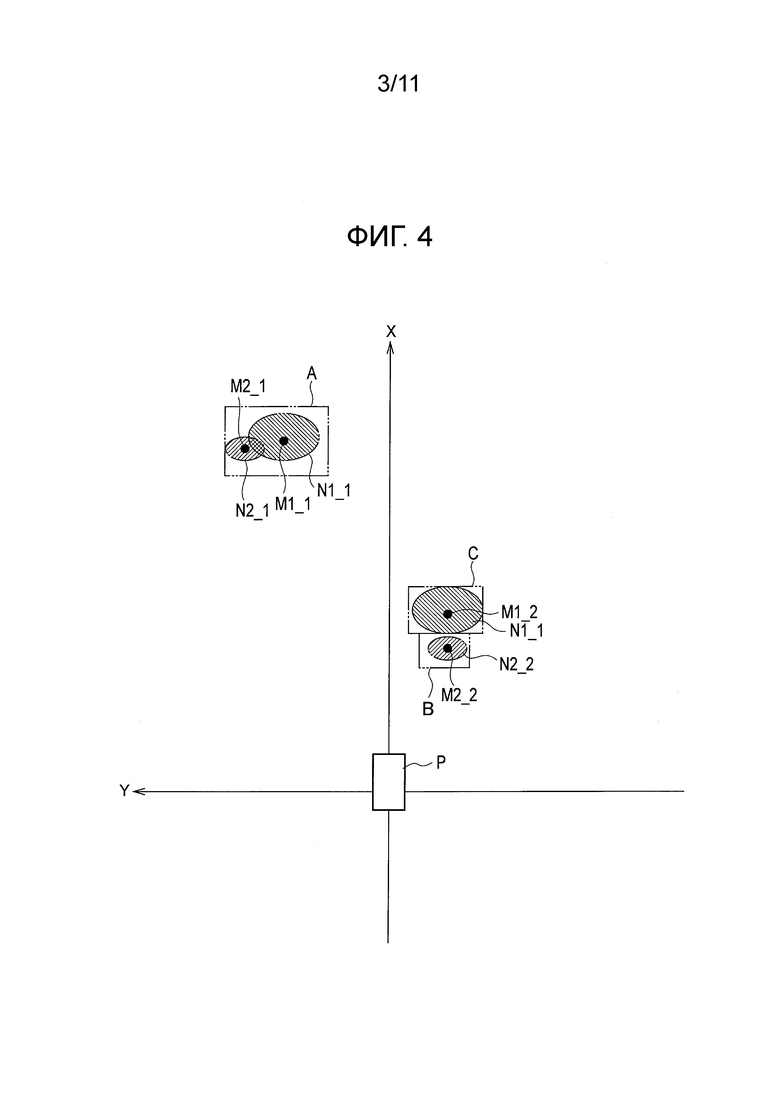
Фиг. 4 является схемой для пояснения способа определения идентификационных данных между объектами, обнаруженными посредством двух датчиков обнаружения позиций объектов, соответственно.
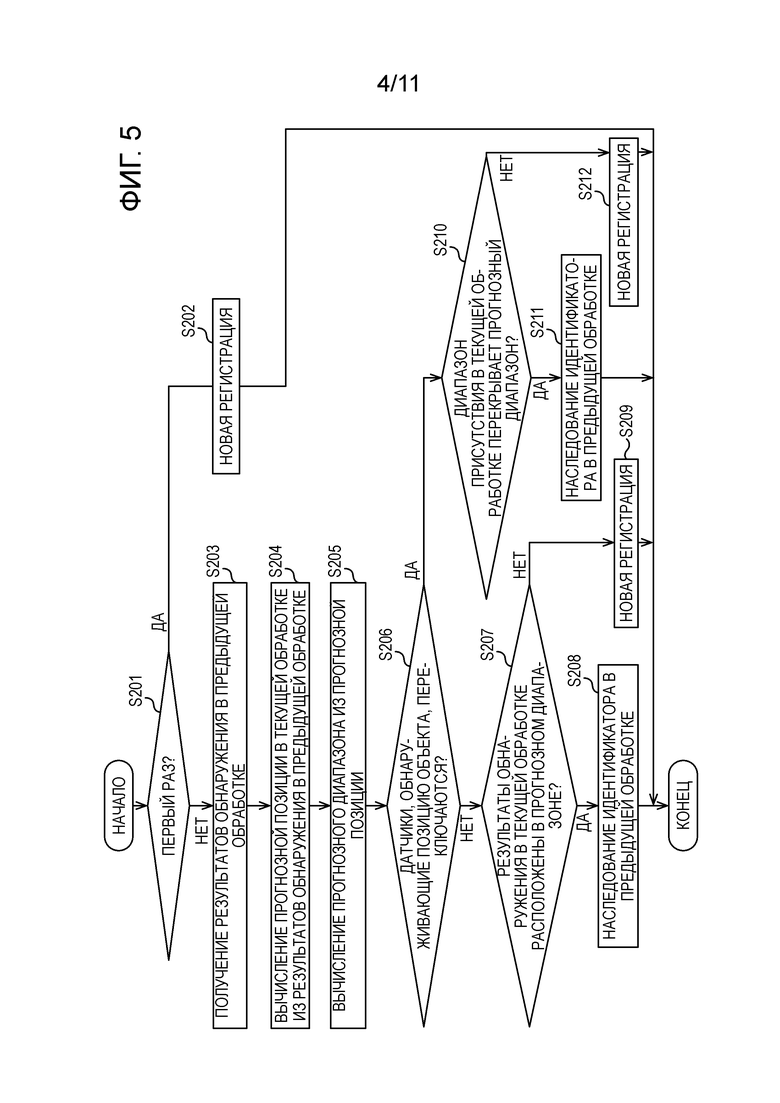
Фиг. 5 является блок-схемой последовательности операций способа для пояснения подробной обработки на этапе S110 по фиг. 3, которая должна выполняться посредством устройства обнаружения объектов согласно первому варианту осуществления.
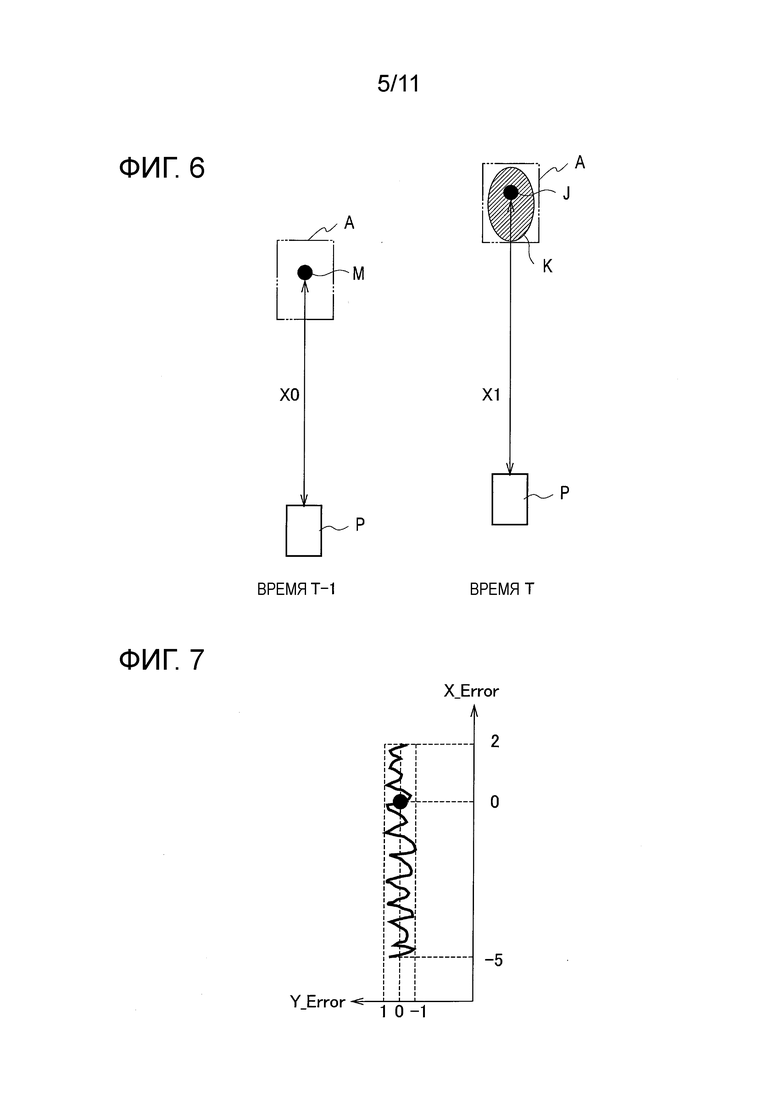
Фиг. 6 является схемой для пояснения способа вычисления прогнозной позиции и прогнозного диапазона в текущей обработке из позиции и скорости объекта, обнаруженного в предыдущей обработке.
Фиг. 7 является проиллюстрированным примером распределения ошибок результатов обнаружения посредством датчиков обнаружения позиций объектов.
Фиг. 8 является схемой для пояснения случая, в котором датчики обнаружения позиций объектов для того, чтобы обнаруживать результаты обнаружения, которые должны определяться в качестве позиции объекта, не переключаются.
Фиг. 9 является схемой для пояснения случая, в котором датчики обнаружения позиций объектов для того, чтобы обнаруживать результаты обнаружения, которые должны определяться в качестве позиции объекта, не переключаются.
Фиг. 10 является схемой для пояснения случая, в котором датчики обнаружения позиций объектов для того, чтобы обнаруживать результаты обнаружения, которые должны определяться в качестве позиции объекта, переключаются.
Фиг. 11 является схемой для пояснения случая, в котором датчики обнаружения позиций объектов для того, чтобы обнаруживать результаты обнаружения, которые должны определяться в качестве позиции объекта, переключаются.
Фиг. 12 является схемой для пояснения способа определения идентификационных данных между объектом, обнаруженным в предыдущей обработке, и объектом, обнаруженным в текущей обработке, в случае если датчики обнаружения позиций объектов не переключаются.
Фиг. 13(a) и 13(b) являются схемами для пояснения способа определения идентификационных данных между объектом, обнаруженным в предыдущей обработке, и объектом, обнаруженным в текущей обработке, в случае если датчики обнаружения позиций объектов не переключаются.
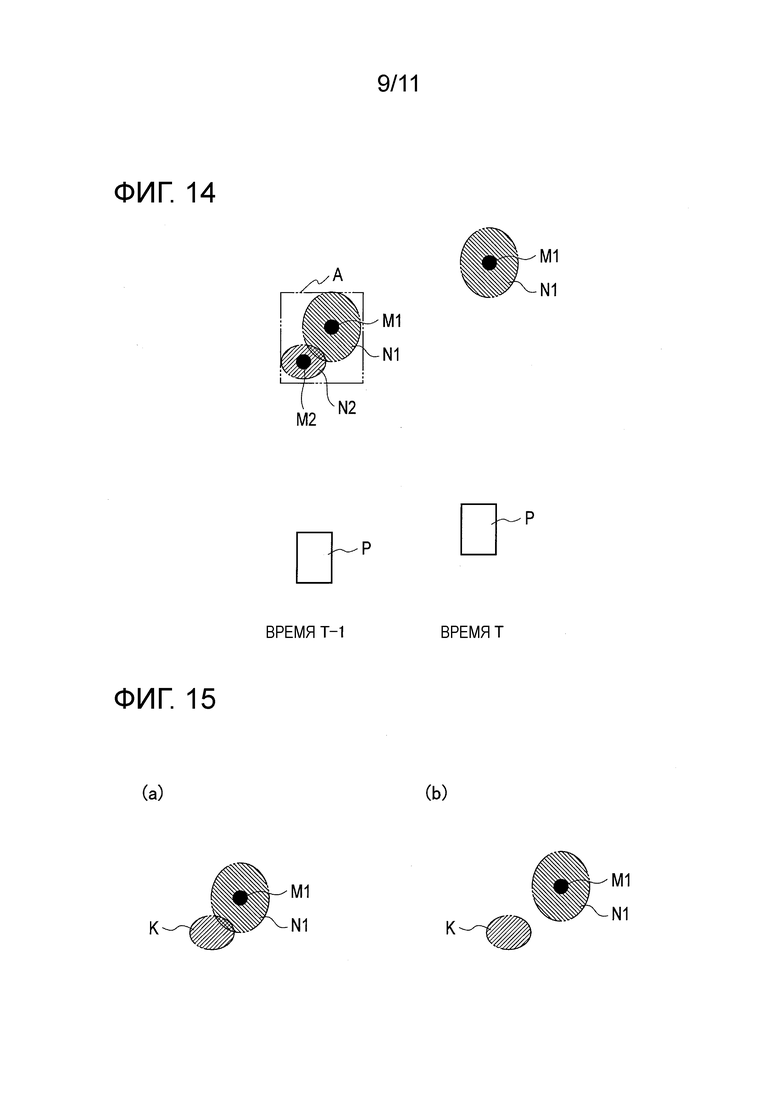
Фиг. 14 является схемой для пояснения способа определения идентификационных данных между объектом, обнаруженным в предыдущей обработке, и объектом, обнаруженным в текущей обработке, в случае если датчики обнаружения позиций объектов переключаются.
Фиг. 15(a) и 15(b) являются схемами для пояснения способа определения идентификационных данных между объектом, обнаруженным в предыдущей обработке, и объектом, обнаруженным в текущей обработке, в случае если датчики обнаружения позиций объектов переключаются.
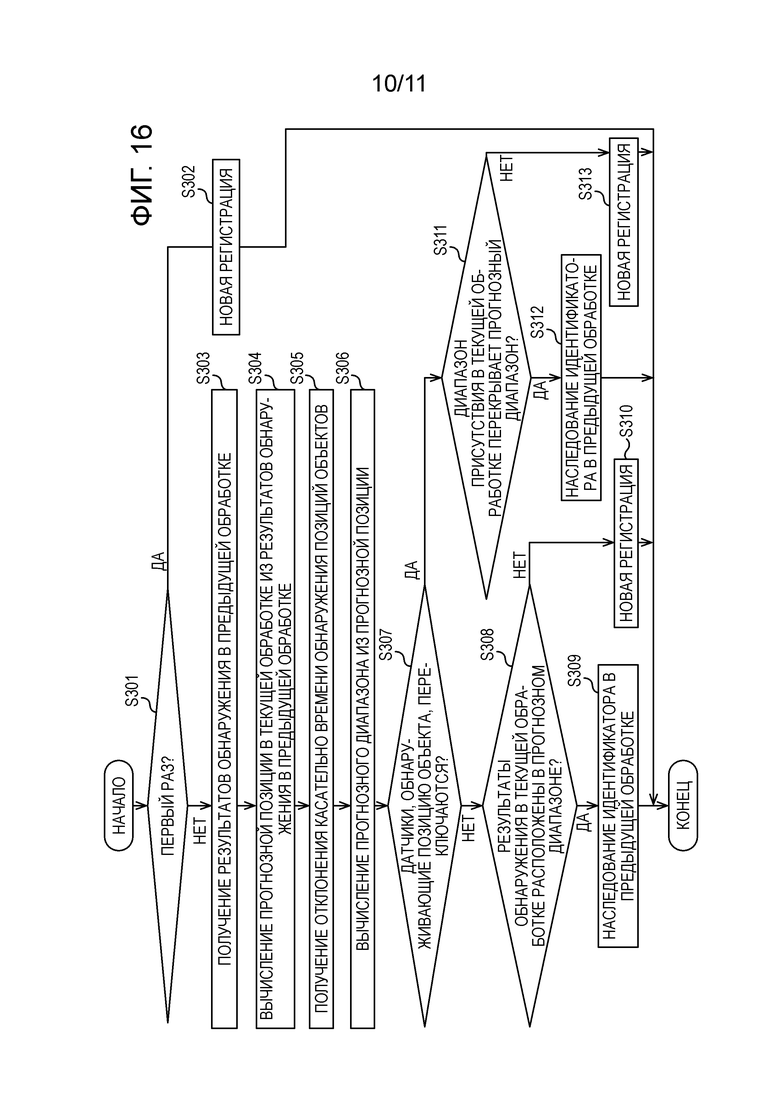
Фиг. 16 является блок-схемой последовательности операций способа для пояснения подробной обработки на этапе S110 по фиг. 3, которая должна выполняться посредством устройства обнаружения объектов согласно второму варианту осуществления.
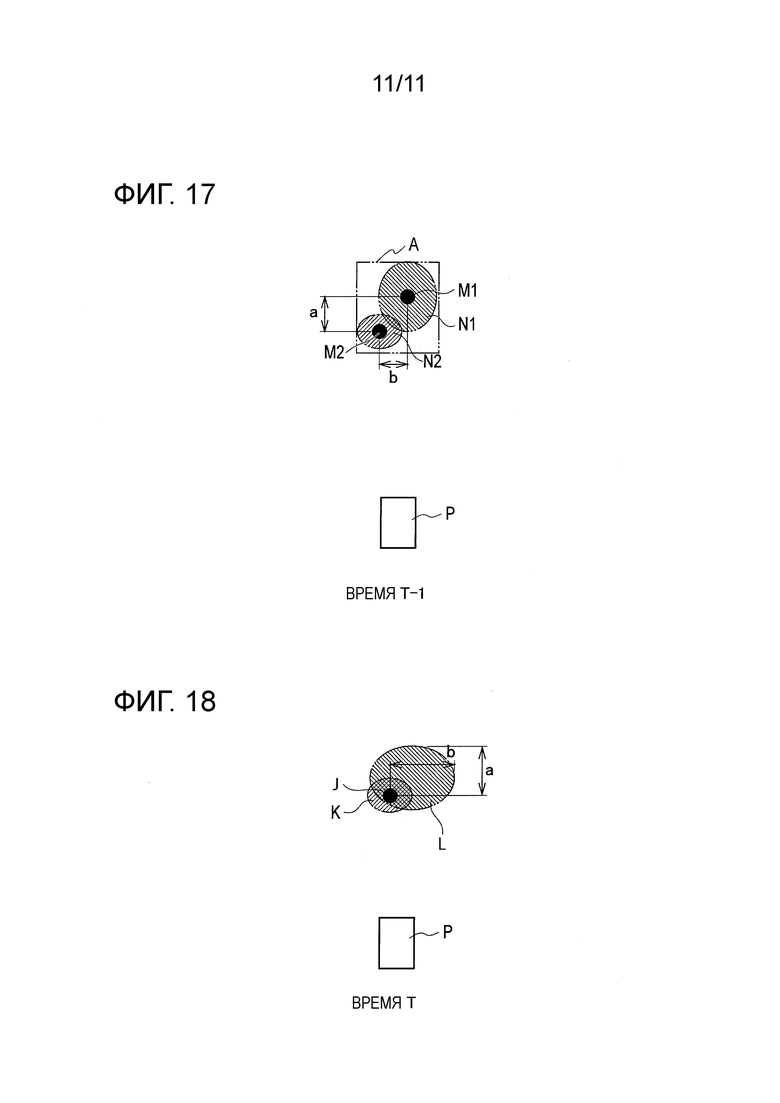
Фиг. 17 является проиллюстрированным примером отклонения между результатами обнаружения посредством соответствующих датчиков обнаружения позиций объектов.
Фиг. 18 является схемой для пояснения прогнозного диапазона, который должен вычисляться на основе отклонения.
Подробное описание вариантов осуществления
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей, идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и перекрывающиеся пояснения опускаются.
[0010] Первый вариант осуществления
Фиг. 1 является схемой для пояснения конфигурации устройства обнаружения объектов согласно первому варианту осуществления настоящего изобретения. Устройство обнаружения объектов согласно первому варианту осуществления включает в себя множество датчиков 10 и 20 обнаружения позиций объектов и схему 30 обнаружения объектов. Устройство обнаружения объектов согласно первому варианту осуществления монтируется на движущемся теле, таком как транспортное средство P (см. фиг. 2), и обнаруживает объекты, расположенные вокруг транспортного средства P, посредством использования множества датчиков 10 и 20 обнаружения позиций объектов.
[0011] Фиг. 2 является схемой для пояснения областей Q1 и Q2 обнаружения, которые являются обнаруживаемыми посредством множества датчиков 10 и 20 обнаружения позиций объектов, соответственно. Датчик 10 обнаружения позиций объектов обнаруживает позицию объекта относительно транспортного средства P для объекта, который присутствует в области Q1 обнаружения вокруг транспортного средства P. Датчик 20 обнаружения позиций объектов обнаруживает позицию объекта относительно транспортного средства P для объекта, который присутствует в области Q2 обнаружения вокруг транспортного средства P, которая, по меньшей мере, частично перекрывает область Q1 обнаружения.
[0012] Датчик 10 обнаружения позиций объектов включает в себя камеру в качестве датчика, который выполняет съемку цифрового изображения посредством использования полупроводникового датчика изображений, такого как CCD и CMOS. Датчик 10 обнаружения позиций объектов обнаруживает позицию объекта и скорость объекта в области Q1 обнаружения относительно транспортного средства P посредством последовательного подвергания снятых изображений обработке изображений и выводит результаты обнаружения в схему 30 обнаружения объектов. Область Q1 обнаружения представляет собой, например, область в пределах предварительно определенного угла R1 обзора и обнаруживаемого расстояния D1 перед транспортным средством P. Обнаруживаемое расстояние D1 составляет, например, приблизительно 200 м.
[0013] Датчик 20 обнаружения позиций объектов включает в себя лазерный дальномер (LRF) в качестве датчика, который обнаруживает позицию цели, например, посредством использования отражения излучаемого света. Датчик 20 обнаружения позиций объектов обнаруживает позицию объекта и скорость объекта в области Q2 обнаружения относительно транспортного средства P посредством последовательного выполнения оптического сканирования и выводит результаты обнаружения в схему 30 обнаружения объектов. Область Q2 обнаружения представляет собой, например, область в пределах предварительно определенного угла R2 обзора (угла сканирования) и обнаруживаемого расстояния D2 перед транспортным средством P. Угол R2 обзора шире угла R1 обзора таким образом, что охватывать угол R1 обзора, тогда как обнаруживаемое расстояние D2, например, меньше обнаруживаемого расстояния D1. Обнаруживаемое расстояние D2 составляет, например, приблизительно 80 м. Множество датчиков 10 и 20 обнаружения позиций объектов задают перекрывающуюся область Q3, которая представляет собой область в пределах угла R1 обзора и обнаруживаемого расстояния D2, в которой области Q1 и Q2 обнаружения перекрывают друг друга.
[0014] Схема 30 обнаружения объектов дополнительно включает в себя модуль 31 определения идентификационных данных и модуль 32 задания идентификаторов. Модуль обнаружения объектов 30 определяет то, являются или нет множество объектов, обнаруженных посредством множества датчиков 10 и 20 обнаружения позиций объектов, идентичными друг другу, затем задает идентичный идентификатор для идентичного объекта и продолжает задавать идентичный идентификатор для объекта, который непрерывно обнаруживается. Одна позиция объекта определяется на основе результатов обнаружения позиций объектов посредством датчиков 10 и 20 обнаружения позиций объектов относительно каждого из идентификаторов. Например, когда датчик 10 обнаружения позиций объектов включает в себя камеру, в то время как датчик 20 обнаружения позиций объектов включает в себя LRF в качестве датчиков, соответственно, позиция объекта, обнаруженная посредством датчика 20 обнаружения позиций объектов, который имеет более высокую точность обнаружения позиции, чем точность обнаружения позиции датчика 10 обнаружения позиций объектов, может определяться в качестве позиции объекта для объекта, соответствующего идентификатору.
[0015] Модуль 31 определения идентификационных данных определяет с регулярными интервалами то, являются или нет множество объектов, обнаруженных посредством датчика 10 обнаружения позиций объектов и датчика 20 обнаружения позиций объектов, идентичными друг другу. Кроме того, модуль 31 определения идентификационных данных определяет то, являются или нет множество объектов, обнаруженных ранее посредством, по меньшей мере, одного из датчика 10 обнаружения позиций объектов и датчика 20 обнаружения позиций объектов, идентичными объектам, подвергнутым определению идентификационных данных. В частности, модуль 31 определения идентификационных данных определяет идентификационные данные между несколькими объектами, которые обнаруживаются посредством, по меньшей мере, одного из датчика 10 обнаружения позиций объектов и датчика 20 обнаружения позиций объектов время от времени.
[0016] Модуль 32 задания идентификаторов задает идентичный идентификатор для объектов, определенных как идентичные посредством модуля 31 определения идентификационных данных, и задает идентификаторы, которые отличаются друг от друга, для объектов, определенных как не идентичные посредством модуля 31 определения идентификационных данных. Таким образом, модуль 32 задания идентификаторов задает идентификаторы для результатов обнаружения, обнаруженных посредством, по меньшей мере, одного из датчика 10 обнаружения позиций объектов и датчика 20 обнаружения позиций объектов в зависимости от результатов определения посредством модуля 31 определения идентификационных данных. Идентификаторы должны допускать идентификацию только объектов на основе соответствующих результатов обнаружения и могут формироваться, например, из порядковых номеров.
[0017] Схема 30 обнаружения объектов может формироваться из микроконтроллера, который представляет собой, например, интегральную схему, включающую в себя центральный процессор (CPU), запоминающее устройство и интерфейс ввода-вывода. В этом случае, модуль 31 определения идентификационных данных и модуль 32 задания идентификаторов реализованы посредством инструктирования CPU выполнять компьютерные программы, установленные заранее в микроконтроллере. Модуль 31 определения идентификационных данных и модуль 32 задания идентификаторов, составляющие схему 30 обнаружения объектов, могут формироваться из интегрированных аппаратных средств или из отдельных элементов аппаратных средств. Между тем, микроконтроллер также может служить, например, в качестве электронного модуля управления (ECU), который используется для управления, связанного с транспортным средством P. То же применимо к секциям в множестве датчиков 10 и 20 обнаружения позиций объектов, которые проводят обработку информации.
[0018] Фиг. 3 является блок-схемой последовательности операций способа, показывающей последовательность обработки, которая должна выполняться посредством устройства обнаружения объектов согласно первому варианту осуществления. Ниже описывается пример способа обнаружения объектов с использованием устройства обнаружения объектов согласно первому варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 3.
[0019] Во-первых, на этапе S101, каждый из множества датчиков 10 и 20 обнаружения позиций объектов обнаруживает позицию объекта и скорость относительно транспортного средства P для каждого объекта, присутствующего в области Q1 обнаружения или в области Q2 обнаружения. Позиции и скорости объектов, обнаруженные посредством множества датчиков 10 и 20 обнаружения позиций объектов, соответственно, выводятся в качестве результатов обнаружения в модуль 31 определения идентификационных данных схемы 30 обнаружения объектов.
[0020] На этапе S102, на основе соответствующих результатов обнаружения посредством датчиков 10 и 20 обнаружения позиций объектов, модуль 31 определения идентификационных данных определяет то, обнаруживает или нет, по меньшей мере, один из датчиков 10 и 20 обнаружения позиций объектов объект. Обработка переходит к этапу S103, когда объект обнаруживается, или обработка переходит к этапу S111, когда объект не обнаруживается.
[0021] Модуль 31 определения идентификационных данных считывает распределение ошибок, которое соответствует позиции объекта, обнаруженной посредством любого из датчиков 10 и 20 обнаружения позиций объектов на этапе S101, из запоминающего устройства на этапе S103. Например, модуль 31 определения идентификационных данных включает в себя запоминающее устройство, которое сохраняет распределение ошибок результатов обнаружения (позиций объектов), соответствующих расстояниям до объектов, которые предварительно установлены для каждого из множества датчиков 10 и 20 обнаружения позиций объектов заранее.
[0022] На этапе S104, модуль 31 определения идентификационных данных оценивает диапазон присутствия в качестве диапазона, в котором каждый объект, возможно, присутствует, на основе позиции объекта, обнаруженной посредством, по меньшей мере, одного из множества датчиков 10 и 20 обнаружения позиций объектов, и на основе распределения ошибок, считываемого на этапе S103. Диапазон присутствия оценивается, например, посредством задания области вокруг обнаруженной позиции объекта таким образом, что она соответствует распределению ошибок. Распределение ошибок может задаваться как позиция объекта, как указано на фиг. 7, который описывается ниже.
[0023] На этапе S105, модуль 31 определения идентификационных данных определяет то, обнаруживается или нет объект посредством обоих из множества датчиков 10 и 20 обнаружения позиций объектов. Обработка переходит к этапу S106, когда объект обнаруживается посредством обоих из них, или обработка переходит к этапу S107, когда объект не обнаруживается посредством обоих из них, т.е. когда только один из множества датчиков 10 и 20 обнаружения позиций объектов обнаруживает объект.
[0024] На этапе S106, модуль 31 определения идентификационных данных определяет то, перекрывает или нет диапазон присутствия, оцененный из позиции объекта, обнаруженной посредством датчика 10 обнаружения позиций объектов, диапазон присутствия, оцененный из позиции объекта, обнаруженной посредством датчика 20 обнаружения позиций объектов. Таким образом, модуль 31 определения идентификационных данных определяет то, является или нет объект, обнаруженный посредством датчика 10 обнаружения позиций объектов, идентичным объекту, обнаруженному посредством датчика 20 обнаружения позиций объектов, на основе двух диапазонов присутствия. Когда диапазоны присутствия перекрывают друг друга, объекты считаются идентичными, и обработка переходит к этапу S108. Когда диапазоны присутствия не перекрывают друг друга, множество объектов считаются не идентичными, и обработка переходит к этапу S109.
[0025] Фиг. 4 является проиллюстрированным примером результатов обнаружения посредством датчика 10 обнаружения позиций объектов и датчика 20 обнаружения позиций объектов для того, чтобы пояснять способ определения идентификационных данных между несколькими объектами на этапе S106. Например, позиции M1_1 и M1_2 объектов двух объектов обнаруживаются посредством датчика 10 обнаружения позиций объектов, и позиции M2_1 и M2_2 объектов двух объектов обнаруживаются посредством датчика 20 обнаружения позиций объектов, соответственно. Кроме того, диапазоны N1_1, N1_2, N2_1 и N2_2 присутствия оцениваются посредством модуля 31 определения идентификационных данных, соответственно, для четырех позиций M1_1, M1_2, M2_1 и M2_2 объектов, обнаруженных посредством датчиков 10 и 20 обнаружения позиций объектов. В этом случае, модуль 31 определения идентификационных данных определяет объекты, которые соответствуют диапазонам N1_1 и N2_1 присутствия, перекрывающим друг друга, в качестве идентичного объекта A. Между тем, модуль 31 определения идентификационных данных определяет объекты, которые соответствуют диапазонам N1_2 и N2_2 присутствия, не перекрывающим друг друга, в качестве различных объектов B и C, которые не являются идентичными друг другу.
[0026] На этапе S107, модуль 31 определения идентификационных данных определяет результаты обнаружения, обнаруженные на этапе S101, в качестве позиций объектов и скоростей объектов.
[0027] На этапе S108, модуль 31 определения идентификационных данных определяет результаты обнаружения, которые обнаруживаются посредством одного из множества датчиков 10 и 20 обнаружения позиций объектов на этапе S101, в качестве позиции объекта и скорости объекта, определенного как идентичный. Например, относительно объекта A, показанного на фиг. 4, и при условии случая, в котором датчик 10 обнаружения позиций объектов включает в себя камеру, и датчик 20 обнаружения позиций объектов включает в себя LRF в качестве датчиков, соответственно, модуль 31 определения идентификационных данных может определять позицию M2_1 объекта, обнаруженную посредством датчика 20 обнаружения позиций объектов, который имеет более высокую точность обнаружения позиции, чем точность обнаружения позиции датчика 10 обнаружения позиций объектов, в качестве позиции объекта для объекта A.
[0028] На этапе S109. модуль 31 определения идентификационных данных определяет результаты обнаружения, которые обнаруживаются посредством множества датчиков 10 и 20 обнаружения позиций объектов на этапе S101, соответственно, в качестве позиций объектов и скоростей объектов, определенных как не идентичные. Например, относительно объектов B и C, показанных на фиг. 4, модуль 31 определения идентификационных данных определяет позицию M1_2 объекта, обнаруженную посредством датчика 10 обнаружения позиций объектов, в качестве позиции объекта для объекта C, и определяет позицию M2_2 объекта, обнаруженную посредством датчика 20 обнаружения позиций объектов, в качестве позиции объекта для объекта B.
[0029] На этапе S110, модуль 31 определения идентификационных данных и модуль 32 задания идентификаторов выполняют обработку для задания идентификатора для каждого объекта, позиция которого определяется на этапах S107-S109. После этого, на этапе S111 выполняется определение в отношении того, должна или нет завершаться обработка. Обычно, определяется то, что обработка не должна завершаться. Следовательно, обработка возвращается к этапу S101, и последовательность обработки S101-S110 повторяется. Как описано выше, последовательность обработки, показанная на блок-схеме последовательности операций способа по фиг. 3, повторяется с регулярными интервалами. Обработка завершается, например, при определении того, что обработка должна завершаться как следствие выключения переключателя зажигания.
[0030] Фиг. 5 является блок-схемой последовательности операций способа для пояснения подробной обработки на этапе S110 по фиг. 3. Во-первых, на этапе S201, модуль 31 определения идентификационных данных определяет то, выполняется или нет обработка идентификации на этапе S110 в первый раз для объекта, результат обнаружения (позиция) которого определяется на этапах S107-S109. Когда обработка выполняется в первый раз, модуль 32 задания идентификаторов заново задает идентификатор для объекта, результат обнаружения которого определяется на этапах S107-S109, и регистрирует заданный идентификатор на этапе S202. Обработка переходит к этапу S203, если обработка выполняется не в первый раз.
[0031] На этапе S203, модуль 31 определения идентификационных данных получает результаты обнаружения, выведенные на этапе S101 предыдущей обработки. Например, модуль 31 определения идентификационных данных сохраняет результаты обнаружения, которые выводятся в каждой обработке этапа S101, последовательно и циклически в запоминающем устройстве, включенном в него, и получает результаты обнаружения посредством считывания результатов обнаружения в предыдущей обработке из запоминающего устройства.
[0032] На этапе S204, модуль 31 определения идентификационных данных вычисляет прогнозную позицию в качестве позиции, в которой объект, возможно, присутствует в текущей обработке, посредством использования результатов обнаружения в предыдущей обработке, полученных на этапе S203. На этапе S205, модуль 31 определения идентификационных данных вычисляет прогнозный диапазон в качестве диапазона, в котором объект, возможно, присутствует в текущей обработке, посредством использования прогнозной позиции, вычисленной на этапе S204.
[0033] Фиг. 6 является схемой для пояснения способа вычисления прогнозной позиции J и прогнозного диапазона K во время T в текущей обработке из позиции M объекта и скорости V объекта A относительно транспортного средства P, которые обнаружены во время T-1 в предыдущей обработке. Например, во время T-1, компонент позиции M объекта в направлении спереди назад (в направлении по оси X) транспортного средства P задается равным X0=40 м, и ее компонент в направлении справа-налево (в направлении по оси Y) задается равным Y0=0 м. Одновременно, компонент скорости V в направлении по оси X задается равным VX= 20 км/ч, и ее компонент в направлении по оси Y задается равным VY=0 км/ч. Когда вышеупомянутые позиция M и скорость V объекта получаются в текущее время T после истечения цикла Δt=0,1 с, относительная прогнозная позиция J вычисляется как X1=X0+VX x Δt ≈ 40,6 м с точки зрения компонента направления по оси X и Y1=0 м с точки зрения компонента направления по оси Y.
[0034] Фиг. 7 является проиллюстрированным примером распределения ошибок, соответствующего случаю обнаружения объекта в позиции M (X1, Y1) объекта относительно транспортного средства P. На фиг. 7, начало координат (0, 0) означает истинное значение, которое представляет фактическую относительную позицию объекта. Фиг. 7 показывает распределение, в котором ошибка в направлении спереди назад (в направлении по оси X) является большой относительно транспортного средства P, в то время как ошибка в направлении справа-налево (в направлении по оси Y) является небольшой. Модуль 31 определения идентификационных данных считывает распределение ошибок по фиг. 7, соответствующее вычисленной прогнозной позиции J (X1, Y1), и затем вычисляет прогнозный диапазон K посредством задания области таким образом, что прогнозная позиция J соответствует истинному значению, и прогнозный диапазон K соответствует диапазону распределения ошибок.
[0035] На этапе S206, модуль 31 определения идентификационных данных определяет то, переключаются или нет датчики 10 и 20 обнаружения позиций объектов, которые обнаруживают позицию объекта, определенную на этапах S107-S109 текущей обработки, из множества датчиков 10 и 20 обнаружения позиций объектов, которые обнаруживают позицию объекта, определенную на этапах S107-S109 предыдущей обработки. Обработка переходит к этапу S207, когда датчики не переключаются, или обработка переходит к этапу S210, когда датчики переключаются.
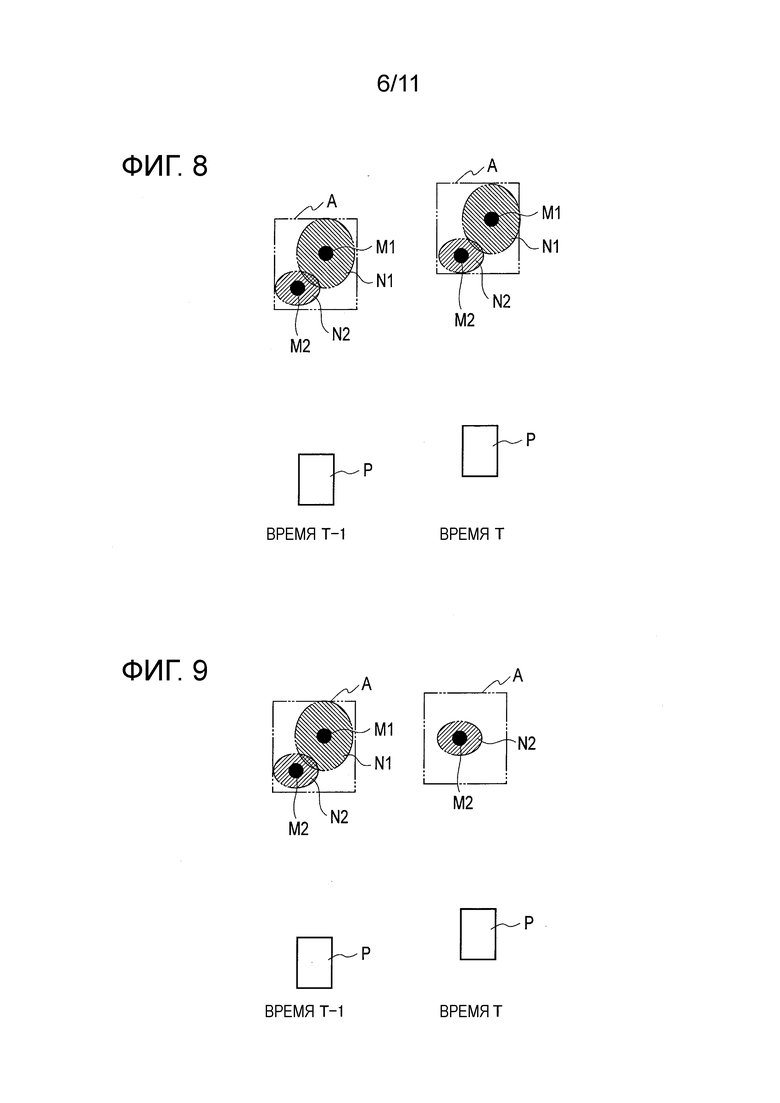
[0036] Фиг. 8 и фиг. 9 являются схемами для пояснения случая, в котором множество датчиков 10 и 20 обнаружения позиций объектов, которые обнаруживают определенную позицию объекта для объекта A, не переключаются. Как показано на фиг. 8, множество позиций M1 и M2 объекта для объекта A предположительно обнаружены посредством множества датчиков 10 и 20 обнаружения позиций объектов во время T-1 в предыдущей обработке, и позиция M2 объекта, обнаруженная посредством датчика 20 обнаружения позиций объектов, имеющего более высокую точность обнаружения, предположительно определена в качестве позиции объекта для объекта A на этапе S108 предыдущей обработки. После этого, если множество позиций M1 и M2 объекта для объекта A обнаруживаются посредством множества датчиков 10 и 20 обнаружения позиций объектов снова во время T в текущей обработке, то датчик обнаружения позиций объектов, который обнаруживает определенную позицию объекта для объекта A, не переключается от датчика 20 обнаружения позиций объектов.
[0037] С другой стороны, как показано на фиг. 9, множество позиций M1 и M2 объекта для объекта A предположительно обнаружены посредством множества датчиков 10 и 20 обнаружения позиций объектов во время T-1 в предыдущей обработке, и позиция M2 объекта, обнаруженная посредством датчика 20 обнаружения позиций объектов, предположительно определена в качестве позиции объекта для объекта A аналогично. После этого, если позиция M1 объекта для объекта A не обнаруживается посредством датчика 10 обнаружения позиций объектов во время T в текущей обработке, то датчик обнаружения позиций объектов, который обнаруживает определенную позицию объекта для объекта A, не переключается от датчика 20 обнаружения позиций объектов аналогично.
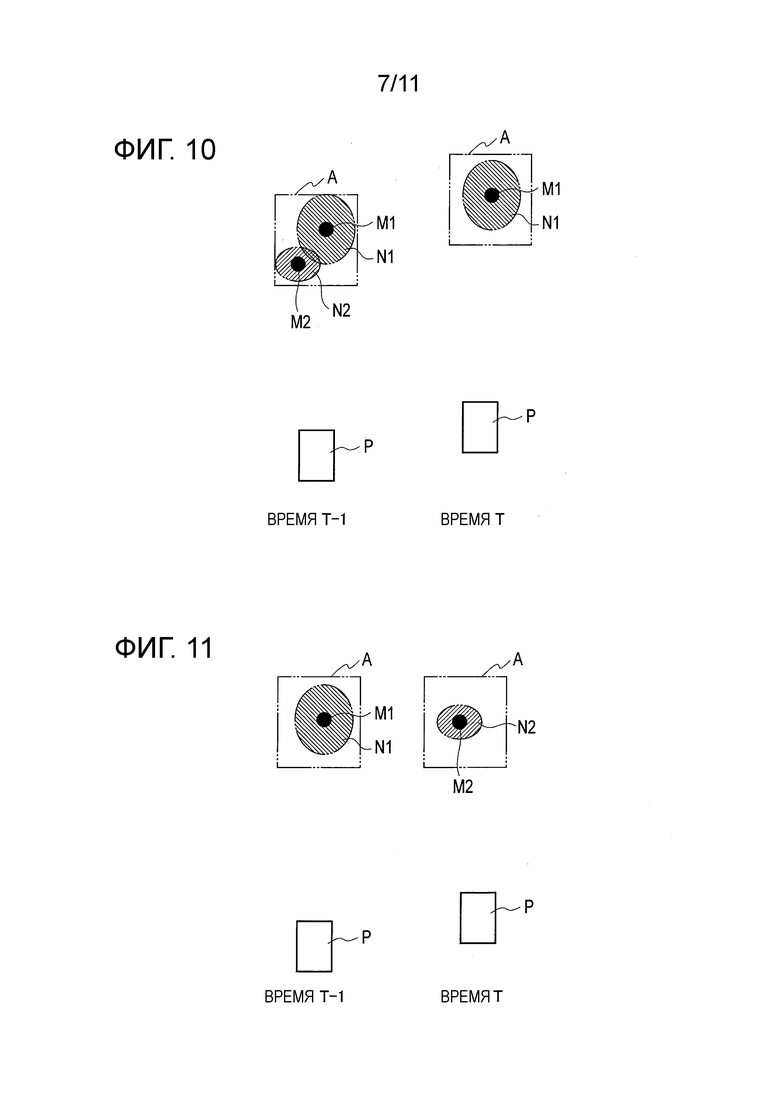
[0038] Фиг. 10 и фиг. 11 являются схемами для пояснения случая, в котором датчики 10 и 20 обнаружения позиций объектов, которые обнаруживают определенную позицию объекта для объекта A, переключаются. Как показано на фиг. 10, множество позиций M1 и M2 объекта для объекта A предположительно обнаружены посредством двух датчиков 10 и 20 обнаружения позиций объектов во время T-1 в предыдущей обработке, и позиция M2 объекта, обнаруженная посредством датчика 20 обнаружения позиций объектов, имеющего более высокую точность обнаружения, предположительно определена в качестве позиции объекта для объекта A на этапе S108 предыдущей обработки. После этого, если позиция M2 объекта не обнаруживается посредством датчика 20 обнаружения позиций объектов во время T в текущей обработке, то только позиция M1 объекта обнаруживается посредством датчика 10 обнаружения позиций объектов. Следовательно, позиция M1 объекта определяется в качестве позиции объекта для объекта A на этапе S107. Соответственно, датчик обнаружения позиций объектов, который обнаруживает определенную позицию объекта для объекта A, переключается с датчика 20 обнаружения позиций объектов на датчик 10 обнаружения позиций объектов.
[0039] С другой стороны, как показано на фиг. 11, только позиция M1 объекта для объекта A предположительно обнаружена посредством датчика 10 обнаружения позиций объектов во время T-1 в предыдущей обработке, и позиция M1 объекта предположительно определена в качестве позиции объекта для объекта A на этапе S107 предыдущей обработки. После этого, если позиция M1 объекта не обнаруживается посредством датчика 10 обнаружения позиций объектов, и позиция M2 объекта обнаруживается посредством датчика 20 обнаружения позиций объектов во время T в текущей обработке, то позиция M2 объекта определяется в качестве позиции объекта для объекта A на этапе S107. Соответственно, датчик обнаружения позиций объектов, который обнаруживает определенную позицию объекта для объекта A, переключается с датчика 10 обнаружения позиций объектов на датчик 20 обнаружения позиций объектов.
[0040] На этапе S207, модуль 31 определения идентификационных данных определяет то, расположена или нет позиция объекта, определенная на этапах S107-S109 текущей обработки, в прогнозном диапазоне, вычисленном на этапе S205. Другими словами, модуль 31 определения идентификационных данных определяет то, является или нет объект, обнаруженный в текущей обработке, идентичным объекту, обнаруженному в предыдущей обработке, на основе позиции объекта, обнаруженной в текущей обработке, и на основе прогнозного диапазона в текущей обработке, вычисленного из позиции объекта, обнаруженной в предыдущей обработке. Обработка переходит к этапу S208, когда позиция объекта, обнаруженная в текущей обработке, расположена в ней, или обработка переходит к этапу S209, когда позиция объекта не находится в ней.
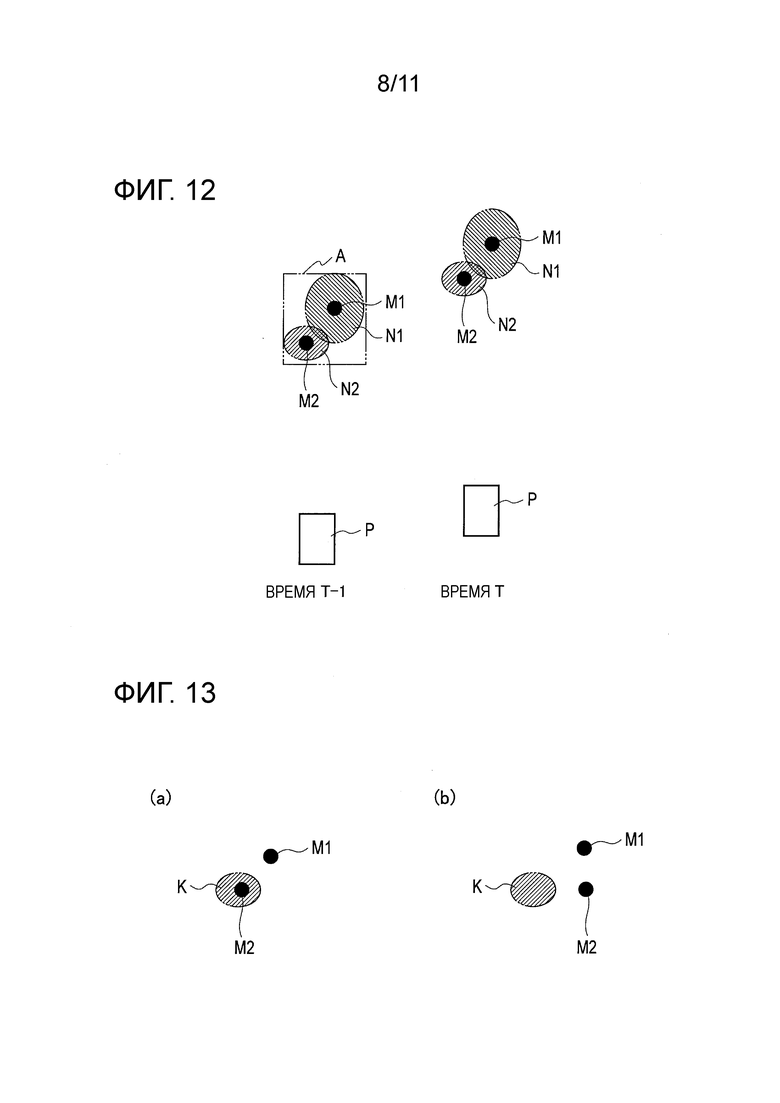
[0041] Фиг. 12 является схемой для пояснения случая, в котором датчики 10 и 20 обнаружения позиций объектов, которые обнаруживают результаты обнаружения, которые должны определяться в качестве позиции объекта, не переключаются из предыдущей обработки. Во время T-1 обработки в предыдущей обработке и во время T обработки в текущей обработке, позиции M1 и M2 объектов обнаруживаются посредством двух датчиков 10 и 20 обнаружения позиций объектов, и позиция M2 объекта определяется в качестве позиции объекта для объекта A. Приводится описание способа инструктирования модулю 31 определения идентификационных данных в этом случае определять на этапе S207 то, является или нет объект, обнаруженный в текущей обработке, идентичным объекту, обнаруженному в предыдущей обработке.
[0042] Фиг. 13(a) является схемой для пояснения случая, в котором позиция M2 объекта определена в качестве позиции объекта для объекта A в предыдущей обработке, и позиция M2 объекта, обнаруженная в текущей обработке, расположена в прогнозном диапазоне K в текущей обработке, который вычисляется из позиции M2 объекта, обнаруженной в предыдущей обработке. В этом случае, модуль 31 определения идентификационных данных определяет то, что объект, обнаруженный в текущей обработке, является идентичным объекту A, обнаруженному в предыдущей обработке, и обработка переходит к этапу S208.
[0043] На этапе S208, на основе определения того, что объект, позиция которого объекта определяется в текущей обработке, является идентичным объекту, позиция которого объекта определена в предыдущей обработке, модуль 32 задания идентификаторов задает идентификатор, который является идентичным идентификатору, заданному в предыдущей обработке. Другими словами, модуль 32 задания идентификаторов наследует идентификатор, который уже задан относительно результата обнаружения, который уже определен в качестве позиции объекта.
[0044] Фиг. 13(b) является схемой для пояснения случая, в котором позиция M2 объекта, определенная в качестве позиции объекта для объекта A в предыдущей обработке и обнаруженная в текущей обработке, не находится в прогнозном диапазоне K в текущей обработке, который вычисляется из позиции M2 объекта, обнаруженной в предыдущей обработке. В этом случае, модуль 31 определения идентификационных данных определяет то, что объект, обнаруженный в текущей обработке, не является идентичным объекту A, обнаруженному в предыдущей обработке, и обработка переходит к этапу S209.
[0045] На этапе S209, на основе определения того, что объект, позиция которого объекта определяется в текущей обработке, не является идентичным объекту, позиция которого объекта определена в предыдущей обработке, модуль 32 задания идентификаторов заново задает идентификатор, который по-прежнему не зарегистрирован, и затем регистрирует заданный идентификатор.
[0046] На этапе S210, модуль 31 определения идентификационных данных определяет то, перекрывает или нет диапазон присутствия, оцененный на этапе S104 текущей обработки, прогнозный диапазон, вычисленный на этапе S205 текущей обработки. Другими словами, модуль 31 определения идентификационных данных определяет то, является или нет объект, обнаруженный в текущей обработке, идентичным объекту, обнаруженному в предыдущей обработке, на основе диапазона присутствия, оцененного в текущей обработке из позиции объекта, обнаруженной непрерывно из предыдущей обработки, и на основе прогнозного диапазона в текущей обработке, вычисленного из позиции объекта, обнаруженной в предыдущей обработке. Обработка переходит к этапу S211, когда имеется участок, в котором диапазон присутствия перекрывает прогнозный диапазон, или обработка переходит к этапу S212, когда отсутствует такой перекрывающийся участок.
[0047] Фиг. 14 является схемой для пояснения случая, в котором датчики 10 и 20 обнаружения позиций объектов для того, чтобы обнаруживать результаты обнаружения, которые должны определяться в качестве позиции объекта, переключаются из предыдущей обработки. Во время T-1 в предыдущей обработке, позиции M1 и M2 объектов обнаружены посредством двух датчиков 10 и 20 обнаружения позиций объектов, соответственно, и позиция M2 объекта определена в качестве позиции объекта для объекта A. Между тем, позиция M2 объекта не обнаруживается во время T в текущей обработке, и позиция M1 объекта определяется в качестве позиции объекта для объекта A. Приводится описание способа инструктирования модулю 31 определения идентификационных данных в этом случае определять на этапе S210 то, является или нет объект, обнаруженный в текущей обработке, идентичным объекту, обнаруженному в предыдущей обработке.
[0048] Фиг. 15(a) является схемой для пояснения случая, в котором прогнозный диапазон K, который вычислен из позиции M2 объекта, определенной в качестве позиции объекта для объекта A в предыдущей обработке, перекрывает диапазон N1 присутствия, оцененный из позиции M1 объекта, обнаруженной в текущей обработке. В этом случае, модуль 31 определения идентификационных данных определяет то, что позиция M1 объекта, обнаруженная в текущей обработке, является идентичной объекту A, обнаруженному в предыдущей обработке, и обработка переходит к этапу S211.
[0049] На этапе S211, на основе определения того, что объект, позиция которого определяется в текущей обработке, является идентичным объекту, позиция которого определена в предыдущей обработке, модуль 32 задания идентификаторов задает идентификатор, который является идентичным идентификатору, заданному в предыдущей обработке. Другими словами, модуль 32 задания идентификаторов наследует идентификатор, который уже задан относительно результата обнаружения, который уже определен в качестве позиции объекта.
[0050] Фиг. 15(b) является схемой для пояснения случая, в котором прогнозный диапазон K, который вычислен из позиции M2 объекта, определенной в качестве позиции объекта для объекта A в предыдущей обработке, не перекрывает диапазон N1 присутствия, оцененный из позиции M1 объекта, обнаруженной в текущей обработке. В этом случае, модуль 31 определения идентификационных данных определяет то, что объект, обнаруженный в текущей обработке, не является идентичным объекту A, обнаруженному в предыдущей обработке, и обработка переходит к этапу S212.
[0051] На этапе S212, на основе определения того, что объект, позиция которого объекта определяется в текущей обработке, не является идентичным объекту, позиция которого объекта определена в предыдущей обработке, модуль 32 задания идентификаторов заново задает идентификатор, который по-прежнему не зарегистрирован, и затем регистрирует заданный идентификатор.
[0052] Как описано выше, согласно устройству обнаружения объектов первого варианта осуществления, прогнозный диапазон, в котором объект, возможно, присутствует в данный момент, вычисляется из позиции объекта, обнаруженного ранее, и прогнозный диапазон используется для того, чтобы определять то, является или нет объект идентичным объекту, обнаруженному ранее. Таким образом, устройство обнаружения объектов согласно первому варианту осуществления может идентифицировать окружающий объект с высокой точностью на основе прогнозного диапазона, вычисленного из результата обнаружения в предыдущей обработке, и на основе результата обнаружения в текущей обработке посредством другого датчика обнаружения позиций объектов, даже когда, например, целевой объект не обнаруживается посредством любого из датчиков 10 и 20 обнаружения позиций объектов.
[0053] Кроме того, устройство обнаружения объектов согласно первому варианту осуществления вычисляет прогнозный диапазон на основе позиции и скорости объекта относительно транспортного средства P. Таким образом, можно повышать точность прогнозного диапазона и идентифицировать окружающий объект с высокой точностью.
[0054] Второй вариант осуществления
Фиг. 16 является блок-схемой последовательности операций способа для пояснения подробной обработки на этапе S110 по фиг. 3, которая должна выполняться посредством устройства обнаружения объектов согласно второму варианту осуществления. Конфигурации, операции и преимущества, не описанные во втором варианте осуществления, являются по существу аналогичными и в силу этого перекрывающимися с конфигурациями, операциями и преимуществами в первом варианте осуществления и опускаются, соответственно. Между тем, описание обработки на этапах S301-S304 по фиг. 16 является аналогичным описание обработки этапов S201-S204 по фиг. 5 и опускается, соответственно.
[0055] На этапе S305, модуль 31 определения идентификационных данных получает отклонение между результатами обнаружения посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов в предыдущей обработке относительно объекта, позиция которого определена на этапе S108, т.е. объекта, обнаруженного посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов и определенного как идентичный.
[0056] Фиг. 17 является схемой для пояснения отклонения между результатами обнаружения посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов. Как показано на фиг. 17, когда позиции M1 и M2 обнаруживаются посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов, отклонение между позицией M1 и позицией M2 составляет "a" в направлении спереди назад (в направлении по оси X) транспортного средства P и "b" в направлении справа-налево (в направлении по оси Y).
[0057] На этапе S306, модуль 31 определения идентификационных данных вычисляет прогнозный диапазон в качестве диапазона, в котором объект, возможно, присутствует в текущей обработке, посредством использования прогнозной позиции, вычисленной на этапе S304. Модуль 31 определения идентификационных данных сначала вычисляет первую прогнозный диапазон из прогнозной позиции, вычисленной на этапе S304 в соответствии со способом, аналогичным этапу S205. Затем, модуль 31 определения идентификационных данных увеличивает первый прогнозный диапазон на основе отклонения, полученного на этапе S305, и вычисляет увеличенный первый прогнозный диапазон в качестве второго прогнозного диапазона. На этапе S306, модуль 31 определения идентификационных данных вычисляет второй прогнозный диапазон в качестве конечного прогнозного диапазона.
[0058] Фиг. 18 является схемой для пояснения прогнозного диапазона, который должен вычисляться на основе отклонения, полученного на этапе S305. Во время T-1 в предыдущей обработке, позиции M1 и M2 предположительно обнаружены посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов, и прогнозная позиция J и первый прогнозный диапазон K во время T в текущей обработке предположительно должны вычисляться из позиции M2. Модуль 31 определения идентификационных данных дополнительно увеличивает первый прогнозный диапазон K таким образом, что он соответствует отклонению (a, b), полученному на этапе S305, за счет этого вычисляя второй прогнозный диапазон L в качестве конечного прогнозного диапазона на этапе S306.
[0059] Подробные пояснения обработки на следующих этапах S307-S313 являются по существу аналогичными и перекрывающимися с пояснениями обработки этапов S206-S212 по фиг. 5 и в силу этого опускаются. Тем не менее, следует отметить, что прогнозный диапазон на этапах S308 и S311 представляет собой конечный прогнозный диапазон на этапе S306.
[0060] Как описано выше, согласно устройству обнаружения объектов второго варианта осуществления, прогнозный диапазон, в котором объект, возможно, присутствует в данный момент, вычисляется из позиции объекта, обнаруженного ранее, и на основе отклонения между результатами обнаружения посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов, и после этого определяется то, является или нет объект идентичным объекту, обнаруженному ранее, посредством использования прогнозного диапазона. Таким образом, как следствие увеличенного прогнозного диапазона, устройство обнаружения объектов согласно второму варианту осуществления может идентифицировать окружающий объект с высокой точностью на основе прогнозного диапазона, вычисленного из отклонения между результатами обнаружения в предыдущей обработке, и на основе результата обнаружения в текущей обработке посредством другого датчика обнаружения позиций объектов, даже когда, например, целевой объект не обнаруживается посредством любого из датчиков 10 и 20 обнаружения позиций объектов.
[0061] Другие варианты осуществления
Хотя настоящее изобретение описано выше со ссылкой на варианты осуществления, не следует понимать, что формулировки и чертежи, составляющие часть этого раскрытия сущности, предназначены для того, чтобы ограничивать настоящее изобретение. Различные альтернативные варианты осуществления, примеры и технологии работы должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
[0062] Например, в первом и втором вариантах осуществления, описанных выше, модуль 31 определения идентификационных данных может быть выполнен с возможностью последовательно определять идентификационные данные относительно результата обнаружения, который когда-то определен как идентичный, но впоследствии не обнаруживается во времени. В частности, когда модуль 31 определения идентификационных данных определяет объект, который обнаруживается посредством любого из датчиков 10 и 20 обнаружения позиций объектов как не идентичный объекту, обнаруженному посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов в течение предварительно определенного числа раз или более, начиная с момента, когда объекты, обнаруженные посредством соответствующих датчиков 10 и 20 обнаружения позиций объектов, определены как идентичные, модуль 31 определения идентификационных данных может быть выполнен с возможностью заново задавать идентификатор для объекта, определенного как не идентичный. Таким образом, устройство обнаружения объектов может сохранять идентификатор в течение предварительно определенного периода времени в случае, если объект становится временно необнаруживаемым вследствие затемнения, действия отклонения объекта от области обнаружения и т.п., за счет этого уменьшая ложное распознавание вследствие временного необнаружения и идентифицируя окружающий объект с высокой точностью.
[0063] В дополнение к вышеприведенному описанию, разумеется, что настоящее изобретение охватывает различные варианты осуществления и т.п., которые явно не раскрываются в данном документе. Следовательно, объем настоящего изобретения определяется только посредством прилагаемой формулы изобретения, которая является обоснованной из вышеприведенного описания.
Список номеров ссылок
[0064] Q1 - область обнаружения посредством датчика 10 обнаружения позиций объектов
Q2 - область обнаружения посредством датчика 20 обнаружения позиций объектов
10 - датчик обнаружения позиций объектов
20 - датчик обнаружения позиций объектов
30 - схема обнаружения объектов
31 - модуль определения идентификационных данных
32 - модуль задания идентификаторов
Множество объектов, обнаруженных посредством множества датчиков, подвергаются определению в отношении того, являются или нет объекты идентичными друг другу. Если имеется объект в множестве объектов, для которого позиция объекта становится необнаруживаемой после момента, когда множество объектов, обнаруженных посредством множества датчиков, определяются как идентичный объект, выполняется определение в отношении того, является ли непрерывно обнаруживаемый объект объектом, идентичным объекту в предыдущей обработке, на основе прогнозного диапазона, вычисленного из ранее обнаруженной позиции объекта для объекта, становящегося необнаруживаемым, и на основе диапазона присутствия, оцененного из позиции объекта для непрерывно обнаруживаемого объекта. 2 н. и 3 з.п. ф-лы, 18 ил.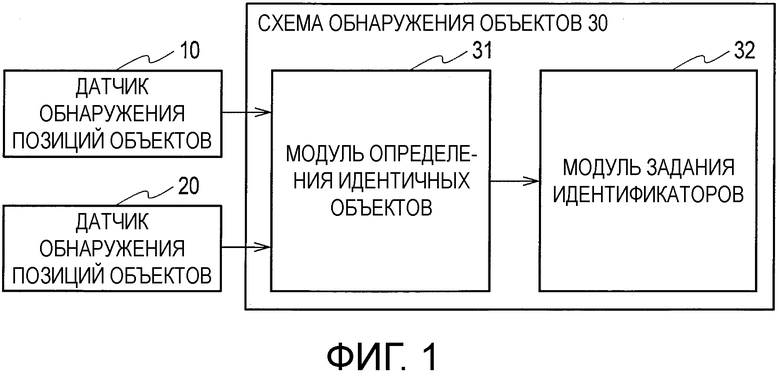
1. Способ обнаружения объектов с использованием устройства обнаружения объектов, содержащего:
множество датчиков (10, 20), смонтированных на движущемся теле и выполненных с возможностью обнаруживать позицию объекта вокруг движущегося тела, и
схему (30) обнаружения объектов, выполненную с возможностью обнаруживать объект посредством определения того, являются или нет множество объектов, обнаруженных посредством множества датчиков (10, 20), соответственно, идентичными друг другу,
причем способ содержит этап, на котором:
инструктируют схеме (30) обнаружения объектов, когда диапазоны присутствия, оцененные из позиций объектов для множества объектов, перекрывают друг друга, в силу чего множество объектов, обнаруженных посредством множества датчиков (10, 20), соответственно, определяются как идентичный объект, затем позиция объекта, обнаруженная посредством второго датчика (20) из множества датчиков (10, 20), определяется в качестве позиции объекта в предыдущей обработке, позиция объекта, обнаруженная посредством второго датчика (20), становится необнаруживаемой, и первый датчик (10) из множества датчиков (10, 20) обнаруживает объект непрерывно позднее, определять то, что непрерывно обнаруживаемый объект посредством первого датчика (10) представляет собой объект, идентичный объекту, обнаруженному в предыдущей обработке, когда прогнозный диапазон в текущей обработке, вычисленный из ранее обнаруженной позиции объекта посредством второго датчика (20), перекрывает диапазон присутствия, оцененный из позиции объекта в текущей обработке непрерывно обнаруживаемого объекта посредством первого датчика (10).
2. Способ обнаружения объектов по п. 1, в котором схема обнаружения объектов увеличивает прогнозный диапазон на основе отклонения между позициями объектов для множества объектов, полученными, когда множество объектов, обнаруженных посредством множества датчиков (10, 20), определяются как идентичный объект.
3. Способ обнаружения объектов по п. 1 или 2, в котором:
схема (30) обнаружения объектов задает идентичный идентификатор для объектов, определенных как идентичные, и задает идентификаторы, отличающиеся друг от друга, для объектов, определенных как не идентичные, и
когда схема обнаружения объектов определяет множество объектов, которые обнаруживаются посредством множества датчиков (10, 20), как не идентичные в течение предварительно определенного числа раз или более, начиная с момента, когда множество объектов, обнаруженных посредством множества датчиков (10, 20), определяются как идентичные, схема обнаружения объектов заново задает идентификатор для объекта, определенного как не идентичный.
4. Способ обнаружения объектов по п. 1 или 2, в котором схема (30) обнаружения объектов вычисляет прогнозный диапазон на основе относительной скорости во время предыдущего обнаружения объекта во множестве объектов, позиция которого становится необнаруживаемой позднее.
5. Устройство обнаружения объектов, содержащее:
множество датчиков (10, 20), смонтированных на движущемся теле и выполненных с возможностью обнаруживать позицию объекта вокруг движущегося тела, и
схему (30) обнаружения объектов, выполненную с возможностью обнаруживать объект посредством определения того, являются или нет множество объектов, обнаруженных посредством множества датчиков (10, 20), соответственно, идентичными друг другу, при этом
когда диапазоны присутствия, оцененные из позиций объектов для множества объектов, перекрывают друг друга, в силу чего множество объектов, обнаруженных посредством множества датчиков (10, 20), соответственно, определяются как идентичный объект, затем позиция объекта, обнаруженная посредством второго датчика (20) из множества датчиков (10, 20), определяется в качестве позиции объекта в предыдущей обработке, позиция объекта, обнаруженная посредством второго датчика (20), становится необнаруживаемой, и первый датчик (10) из множества датчиков (10, 20) обнаруживает объект непрерывно позднее, схема обнаружения объектов определяет то, что непрерывно обнаруживаемый объект посредством первого датчика (10) представляет собой объект, идентичный объекту, обнаруженному в предыдущей обработке, когда прогнозный диапазон в текущей обработке, вычисленный из ранее обнаруженной позиции объекта посредством второго датчика (20), перекрывает диапазон присутствия, оцененный из позиции объекта в текущей обработке непрерывно обнаруживаемого объекта посредством первого датчика (10).
| JP 2006292621 A, 26.10.2006 | |||
| JP 2015041265 A, 02.03.2015 | |||
| US 2012313806 A1, 13.12.2012 | |||
| US 2009201192 A1, 13.08.2009 | |||
| US 2013335259 A1, 19.12.2013. |

