Изобретение относится к предохранительному тормозу для подъемного механизма, согласно ограничительной части пункта 1 формулы изобретения, и к способу работы предохранительного тормоза для подъемного механизма, согласно ограничительной части пункта 11 формулы изобретения.
Для подъема и опускания грузов часто применяются приводимые в действие электрически или гидравлически подъемные механизмы, при этом обычно предусмотрен вращательный привод, который с помощью троса или другой механической конструкции, например, с помощью двухрычажного привода, обеспечивает подъем, соответственно, опускание груза.
Для защиты персонала и материала часто требуется снабжение подъемного механизма предохранительным тормозом. Такой предохранительный тормоз должен в опасных производственных состояниях, в частности, при не допустимо высокой скорости опускания груза, тормозить и останавливать груз. Такое не преднамеренное движение может возникать, например, при не предусмотренном прерывании электроснабжения, при выходе из строя приводного элемента или рабочего тормоза, или по другим причинам.
Существенным является то, что предохранительный тормоз, который иногда называется также улавливающим тормозом, является независимым от рабочего тормоза. То есть предохранительный тормоз должен работать также тогда, когда выходит из строя рабочий тормоз.
В публикации DE 101 48 408 C1 - Hoffmann «Предохранительный тормоз для электрической цепной тяги» - показана часто используемая система, в которой приводной вал подъемного механизма (в данном случае электрической цепной тяги) снабжен тормозным кольцом, т.е. основанным на трении замедляющим приспособлением. Тормозное кольцо соединено с тормозным храповым диском, с которым входит в зацепление храповая собачка в случае предохранительного замедления. Для приведения в действие храповой собачки предусмотрено центробежное приспособление, с которым соединен привод. В случае выхода из строя рабочего тормоза или по другим причинам слишком высокой скорости опускания подъемного механизма, храповая собачка приводится в зацепление с тормозным храповым диском, и подъемный механизм, соответственно груз подъемного механизма, тормозится и останавливается.
Известная из уровня техники система имеет тот недостаток, что на основании управляемого центробежной силой инициирования предохранительного тормоза должно иметься значительное различие между рабочим опусканием груза и скоростью опускания в случае неисправности для обеспечения возможности различения между обычным опусканием груза и аварийным состоянием. Другой недостаток состоит в том, что испытание центробежного приспособления может осуществляться за счет опускания груза или пробного опускания подъемного механизма с очень высокой скоростью опускания. Таким образом, испытание центробежного приспособления и тем самым предохранительного тормоза связано с высокими пиковыми нагрузками и соответствующей нагрузкой механических элементов. Кроме того, современные предписания безопасности для особенно критических отдельных случаев приводят к тому, что для предохранительных тормозов, согласно указанному уровню техники, могут возникать проблемы при сертификации.
Поэтому задачей данного изобретения является создание предохранительного тормоза для подъемного механизма, который работает надежно, обеспечивает возможность точного регулирования и действие которого можно контролировать без связанных с износом и затратных испытаний.
Центральной идеей решения задачи изобретения является использование вместо известного из уровня техники механического центробежного выключателя для приведения в действие храповой собачки подъемного электромагнита или другого электромеханического исполнительного элемента, при этом соответствующее положение храповой собачки контролируется по меньшей мере с помощью двух выключателей, соответственно, датчиков, и при этом с помощью направленного на безопасность управления и по меньшей мере одного датчика контролируется движение опускания и в аварийном случае инициируется предохранительное торможение. При этом подъемный электромагнит, соответственно, храповая собачка расположена так, что за счет пружинной силы и/или за счет силы тяжести храповая собачка вводится в зацепления тогда, когда исполнительный элемент, например подъемный электромагнит, выключается при отсутствии тока, соответственно, при отсутствии подачи энергии. Такие системы предпочтительно возможны для использования для подъемных столов, которые защищаются в настоящее время с помощью так называемых улавливающих цилиндров (вытеснительных амортизаторов), приведение в действие которых, однако, также связано, как правило, с большими силами и тем самым с потерями и/или с ограничением участка движения подъемного механизма. В то время как во вращательных приводах, как в публикации DE 101 48 408 C1, храповая собачка взаимодействует с вращающимся тормозным храповым диском в качестве тормозного храпового элемента, в подъемных столах и при других линейных применениях в качестве тормозного храпового элемента используется зубчатая рейка (тормозная храповая рейка), за счет чего отпадает необходимость в преобразовании линейного движения во вращательное движение.
Задача решена, в частности, с помощью предохранительного тормоза, согласно пункту 1 формулы изобретения, и с помощью способа, согласно пункту 11 формулы изобретения.
При этом предохранительный тормоз предусмотрен для подъемного механизма, при этом с приводом подъемного механизма соединен тормозной храповой элемент, в частности тормозной храповой диск или тормозная храповая зубчатая рейка, и при этом предусмотрена храповая собачка для вхождения в зацепление в свободное пространство для собачки тормозного храпового элемента в случае не допустимой скорости опускания подъемного механизма, при этом тормозной храповой элемент блокируется. При этом предусмотрен исполнительный элемент для приведения в действие храповой собачки, при этом храповая собачка и исполнительный элемент выполнены и расположены так, что в состоянии без энергии исполнительного элемента храповая собачка прилегает к тормозному храповому элементу или входит в свободное пространство для собачки тормозного храпового элемента, и в состоянии с подачей энергии исполнительного элемента храповая собачка отходит от тормозного храпового элемента или выходит из свободного пространства для собачки и деблокирует тормозной храповой элемент, при этом предусмотрено электронное или цифровое управление исполнительным элементом, при этом предусмотрено управление для контролирования скорости опускания подъемного механизма, и при превышении допустимой скорости опускания предусмотрен перевод исполнительного элемента в состояние без энергии, и при этом предусмотрены по меньшей мере два соединенных с управлением датчика для определения рабочего состояния храповой собачки, при этом с помощью датчиков можно относительно рабочего состояния различать по меньшей мере между отведенным состоянием, прилегающим состоянием и полностью вдвинутым в свободное пространство для собачки состоянием. С помощью этого предохранительного тормоза возможно точное определение и контролирование предельной скорости, при превышении которой должен срабатывать предохранительный тормоз. За счет использования двух датчиков, например выключателей, дополнительно к этому возможно контролирование с помощью управления функцией и движением храповой собачки и распознавание не желательных рабочих состояний, например в случаях, в которых предохранительный тормоз находится в зацеплении, а привод подъемного механизма стремится далее опускать груз.
Кроме того, задача решена с помощью способа работы предохранительного тормоза для подъемного механизма, при этом с приводным валом подъемного механизма соединен тормозной храповой элемент, и при этом храповая собачка входит в свободное пространство для собачки тормозного храпового элемента в случае не допустимой скорости опускания подъемного механизма, при этом тормозной храповой элемент блокируется. При этом предусмотрен исполнительный элемент для приведения в действие храповой собачки, при этом в состоянии без энергии исполнительного элемента храповая собачка подводится к тормозному храповому элементу или вводится в свободное пространство для собачки тормозного храпового элемента, и в состоянии с подачей энергии исполнительного элемента храповая собачка отводится от тормозного храпового элемента и выводится из свободного пространства для собачки, и тормозной храповой элемент освобождается, при этом с помощью электронного или числового управления осуществляется приведение в действие исполнительного элемента, при этом с помощью управления контролируется скорость опускания подъемного механизма, и при превышении допустимой скорости опускания исполнительный элемент переводится в состоянии без энергии, и при этом с помощью по меньшей мере двух датчиков измеряется соответствующее рабочее состояние храповой собачки, при этом с помощью датчиков относительно рабочего состояния устанавливается различие по меньшей мере между отведенным состоянием, состоянием прилегания и полностью введенным в свободное пространство для собачки состоянием, и при этом с помощью управления сигналы двух датчиков и измеряемая скорость применяются при управлении исполнительным элементом и приводом. С помощью этого способа могут быть реализованы уже поясненные применительно к устройству преимущества.
Предпочтительные варианты выполнения изобретения указаны в зависимых пунктах формулы изобретения. Указанные для предохранительного тормоза предпочтительные варианты выполнения справедливы по смыслу также для способа, согласно изобретению, и наоборот. Указанные в зависимых пунктах формулы изобретения предпочтительные варианты выполнения могут быть реализованы как по отдельности, так и в любой комбинации друг с другом.
В одном предпочтительном варианте выполнения исполнительный элемент является подъемным электромагнитом. Такие подъемные электромагниты могут особенно быстро освобождать храповую собачку после выключения подачи энергии (электрического тока), так что она под действием пружинной силы и/или силы тяжести может заскакивать в свободное пространство для собачки тормозного храпового элемента. Однако в качестве альтернативного решения возможно также удерживание храповой собачки открытой пневматически или гидравлически, при этом в этом случае с помощью управления соответствующим клапаном может обеспечиваться возможность движения храповой собачки. Однако в этой связи важно, что эта блокировка выполнена с возможностью самостоятельного предохранения, что в этой связи означает, что в случае отсутствия энергии должно автоматически заниматься безопасное рабочее положение, т.е. в случае отсутствия тока или т.п., храповая собачка самостоятельно входит в зацепление с тормозным храповым элементом.
Управление (электронное или числовое управление) предпочтительно выполнено также избыточным или с самостоятельным предохранением, так что неисправность всегда приводит к аварийной остановке подъемного механизма. Также функция датчика скорости, с помощью которого контролируется скорость опускания подъемного механизма, должна быть выполнена избыточной и/или контролироваться с помощью отдельной предохранительной схемы.
В одном предпочтительном варианте выполнения контролирование скорости опускания подъемного механизма, соответственно перемещаемого им груза, осуществляется с помощью кодового датчик троса, который является часто применяемым и очень надежным инструментом. В качестве альтернативного решения, с валом привода подъемного механизма, например с осью, на которую воздействует тормозной храповой элемент, может быть также соединен датчик скорости вращения или инкрементный датчик или т.п. для измерения скорости. В этом случае тормозной храповой элемент предпочтительно выполнен в виде зубчатого диска (тормозного храпового диска). В одном предпочтительном варианте выполнения возможно также комбинирование друг с другом двух, полностью различных измерительных приспособлений для контролирования друг друга, например, кодового датчика троса с датчиком вращения, или радарного датчика с лазерным способом измерения.
Предпочтительно, управление осуществляется так, что в режиме регулирования происходит прилегание храповой собачки к тормозному храповому элементу лишь при остановленном приводе подъемного механизма. Тем самым предотвращается износ храповой собачки, который может возникать, например, при подъеме груза, при котором отвод храповой собачки от тормозного храпового элемента на основании принципа работы не требуется обязательно.
Проверка функции храповой собачки и, в частности, двух датчиков для измерения соответствующего положения, соответственно соответствующего рабочего состояния храповой собачки, может осуществляться просто и, прежде всего, также щадящим образом для материала, тем, что исполнительный элемент при медленном опускании (в пробном режиме) подъемного механизма, соответственно груза подъемного механизма, отключается от подачи тока, соответственно энергии, при этом храповая собачка сначала должна прилегать к тормозному храповому элементу, а затем также заскакивать в тормозной храповой элемент. Это означает, что в пробном режиме при приведении в действие исполнительного элемента должны переключаться все три рабочих состояния и тем самым оба датчика храповой собачки. Кроме того, при этой проверке можно при заскочившей храповой собачке и тем самым остановленном приводе последовательно повышать крутящий момент электродвигателя, с целью проверки механической прочности храповой собачки и удерживающего момента тормозного храпового элемента. Такие проверки можно выполнять щадящим для материала образом автоматически с регулярными интервалами, например, один раз в день или же при каждом производственном использовании подъемного механизма.
Ниже приводится более подробное пояснение примера выполнения предохранительного тормоза, согласно изобретению, при этом этот пример выполнения служит одновременно для пояснения способа, согласно изобретению, со ссылками на прилагаемые чертежи, на которых схематично изображено:
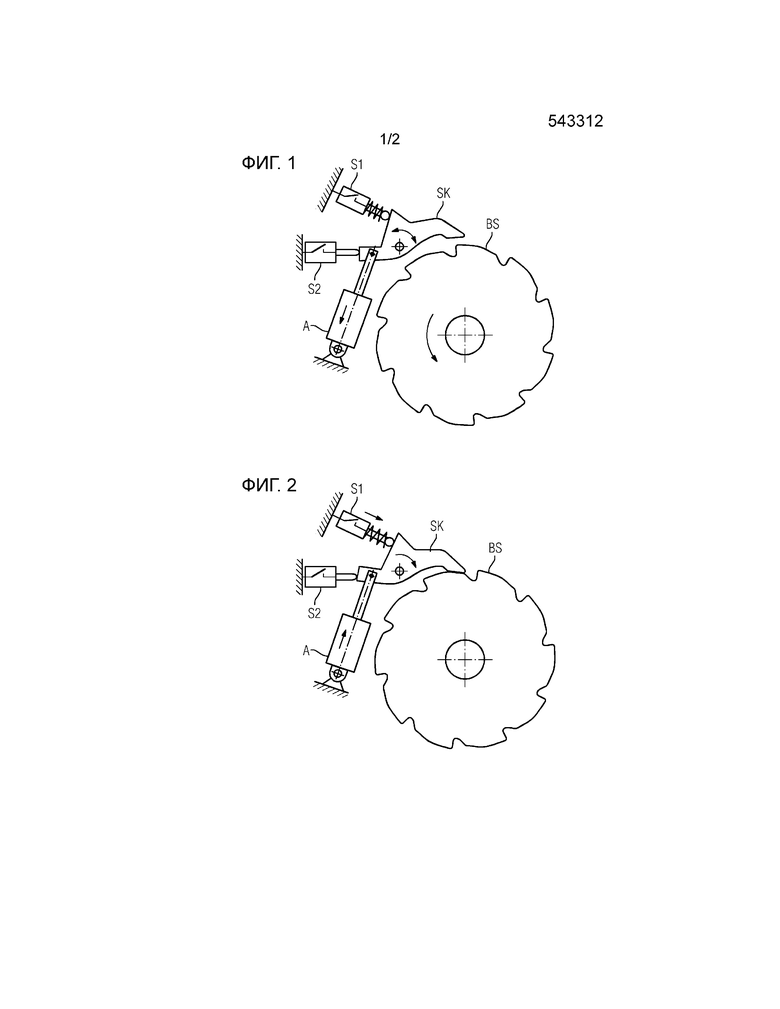
фиг. 1 - предохранительный тормоз при опускании или подъеме груза с допустимой скоростью;
фиг. 2 - предохранительный тормоз при рабочей остановке подъемного механизма; и
фиг. 3 - предохранительный тормоз после остановки падения при аварийной остановке подъемного механизма.
На фиг. 1, 2 и 3 показана одна и та же система в различных рабочих состояниях. Поэтому при пояснении функций отдельных конструктивных элементов используются позиции, введенные на основании фиг. 1, также для фиг. 2 и 3.
Хотя на фигурах изображен вращающийся тормозной храповой элемент (тормозной храповой диск), аналогичным образом, в частности для подъемных столов и других линейно работающих подъемных механизмов, тормозной храповой элемент может быть выполнен в виде зубчатой рейки (тормозной храповой рейки). На фиг. 1 в качестве конструктивных элементов подъемного механизма показаны выполненный в виде тормозного храпового диска и называемый в последующем тормозным храповым элементом BS и храповая собачка SK, при этом храповая собачка SK приводится в действие с помощью исполнительного элемента А. Датчики S1 и S2, которые в данном примере выполнения выполнены как выключатели (прерыватели), приводятся в действие с помощью движения храповой собачки SK, при этом храповая собачка SK установлена с возможностью поворота. Тормозной храповой диск BS соединен через тормозное кольцо или другой фрикционный элемент (не изображен) с приводной осью подъемного механизма (также не изображен). Тормозной храповой диск BS и остальной (не изображенный) подъемный механизм соответствуют по существу уровню техники, как пояснено, например, в публикации DE 101 48 408 С1; однако относительно этого уровня техники изменены храповая собачка SK, ее приведение в действие (исполнительный элемент А) и датчики (датчики S1 и S2). Также относительно уровня техники изменен, соответственно, дополнительно введен датчик для контролирования скорости опускания, соответственно скорости груза, подъемного механизма.
В последующем принимается, что скорость опускания подъемного механизма, соответственно груза, определяется с помощью (не изображенного) датчика скорости вращения на оси вращения тормозного храпового диска BS. Относительно фигур, при вращении против часовой стрелки тормозного храпового диска BS груз опускается, при вращения по часовой стрелке груз поднимается.
Датчики S1 и S2 соединены с управляющим блоком подъемного механизма и поставляют информацию в управляющий блок о позиции (положении) храповой собачки SK. При этом датчики S1 и S2 согласованы с одним из трех возможных рабочих состояний (позиций, положений) храповой собачки SK. В альтернативных вариантах выполнения могут применяться также другие комбинации датчиков, например, несколько датчиков могут быть комбинированы в одном конструктивном элементе, или же, например, единственный аналоговый датчик может измерять угол поворота храповой собачки SK и передавать в (не изображенный) управляющий блок. Однако по причинам контролирования неисправностей предпочтительно использовать независимые друг от друга датчики, соответственно выключатели, так что обеспечивается возможность проверки приемлемости, соответственно, контролирования функции.
В данном примере выполнения датчик S1 включен и расположен так, что он замкнут, когда храповая собачка SK отодвинута от тормозного храпового диска BS, т.е., что также при вращении тормозного храпового диска BS храповая собачка SK не находится в контакте с тормозным храповым диском BS. Этот случай показан на фиг. 1; при замкнутом выключателе, соответственно, датчике S1, привод деблокирован, а именно, как для подъема, так и опускания груза.
На фиг. 2 показана регулярная остановка подъемного механизма, при этом исполнительный элемент А деблокирует храповую собачку SK. Это означает, что в противоположность показанному на фиг. 1, на которой исполнительный элемент А BS отодвинул храповую собачку SK от тормозного храпового диска, храповая собачка SK за счет пружинной силы (пружина изображена на управляющем элементе датчика S1) повернута к тормозному храповому диску BS и прилегает к нему. Датчик S1 теперь разомкнут, что может быть использовано также, например, для выключения подачи тока в привод подъемного механизма. Датчик S1, который здесь выполнен в качестве размыкателя, в противоположность показанному на фиг. 1, разомкнут и поэтому передает в соединенный управляющий блок информацию, что храповая собачка SK прилегает к тормозному храповому диску BS.
При этом следует еще раз отметить, что в принципе различие между рабочими состояниями на фиг. 1 и 2 может быть обеспечено с помощью одного единственного выключателя, соответственно датчика, однако в этом случае отпадает возможность обоюдного контролирования правильного функционирования датчиков S1 и S2. Это означает, что показанный вариант выполнения по меньшей мере с двумя датчиками, соответственно выключателями, повышает безопасность системы, соответственно, обеспечивает возможность распознавания неисправностей.
Из-за особой формы тормозного храпового диска BS, при которой свободное пространство для собачки имеет углубление в тангенциальном направлении, храповая собачка SK погружается лишь тогда полностью в пространство для собачки тормозного храпового диска BS (введенное состояние), когда при прилегающей храповой собачке SK, как показано на фиг. 2, происходит дальнейшее движение опускания (вращательное движение тормозного храпового диска BS против часовой стрелки). Это состояние показано на фиг. 3.
Таким образом, показанное на фиг. 3 состояние может наступить лишь тогда, когда опускание груза, соответственно подъемного механизма, происходит в рабочем состоянии без подачи энергии исполнительного элемента А, что предусмотрено в регулярной работе подъемного механизма. Это означает, что показанное на фиг. 3 состояние может возникать лишь в случае улавливания, т.е. при вхождении или заскакивании храповой собачки SK во время режима опускания. При этом поворотная храповая собачка SK поворачивается относительно показанного на фиг. 2 состояния далее в направлении оси вращения тормозного храпового диска BS, что обнаруживается за счет приведения в действие (размыкания) датчика S2 (размыкающего выключателя). За счет этого в соединенный управляющий блок приходит информация, что наступил случай улавливания, что можно использовать, например, для остановки привода (аварийной остановки), подачи сигнала тревоги или т.п.
При планомерном (регулярном режиме работы) подъеме груза, соответственно подъемного механизма, приводится в действие исполнительный элемент А, т.е. в данном примере в подъемный электромагнит подается ток. За счет этого храповая собачка SK поворачивается от тормозного храпового диска BS. Это состояние показано на фиг. 1. Подъемный привод может быть включен, и рабочий тормоз (если имеется) отпущен. То же относится к планомерному опусканию груза. В положении покоя (при остановке подъемного механизма) как привод, так и исполнительный элемент А обесточены. Возможно имеющийся рабочий тормоз находится в зацеплении. Храповая собачка SK прилегает к зубьям тормозного храпового диска BS (см. фиг. 2), однако не вводится полностью в свободное пространство для собачки тормозного храпового диска BS.
Если происходит выход из строя рабочего тормоза или по другой причине груз непреднамеренно продолжает опускаться, то храповая собачка SK полностью заскакивает в ближайшее свободное пространство для собачки и тем самым блокирует тормозной храповой диск BS. Подъемный механизм, соответственно груз, защищен од дальнейшего опускания. Датчик S2 приводится в действие и предотвращает возможность включения привода посредством регулярного процесса управления. Однако в этом положении (см. фиг. 3) привод может переключаться на подъем, с целью освобождения храповой собачки SK, так что снова может достигаться показанное на фиг. 2 состояние, и после этого может выполняться полный отвод (см. фиг. 1) храповой собачки SK с помощью исполнительного элемента А. Аналогично поясненному случаю выхода из строя рабочего тормоза в состоянии покоя подъемного механизма, также в случае неисправности подъемного механизма в ходе работы, т.е. в отведенном состоянии храповой собачки SK, согласно фиг. 1, исполнительный элемент А деблокируется, соответственно обесточивается. Это может быть инициировано, например, с помощью управляющего блока, когда с помощью (не изображенного) датчика частоты вращения или датчика скорости обнаруживается превышение допустимой скорости опускания груза, соответственно, частоты вращения опускания приводного вала подъемного механизма. То же относится к случаю выхода из строя электроснабжения или т.п. В этом случае храповая собачка SK сначала прилегает к тормозному храповому диску BS (см. фиг. 2) и затем полностью заскакивает в свободное пространство для собачки, так что тормозной элемент тормозного храпового диска BS может замедлять и тормозить ось, тросовый барабан или т.п.
В частности, за счет использования двух датчиков S1 и S2 и за счет автоматического (с помощью пружинной силы и/или силы тяжести) приведения в действие храповой собачки SK в обесточенном состоянии обеспечивается надежная работа предохранительного тормоза. В зависимости от требуемой защиты от неисправностей (класса защиты) существенные элементы решения, в частности, управляющий блок и датчики для измерения скорости груза, могут или должны быть выполнены избыточными или постоянно контролироваться (с защитой от неисправностей). Показанное решение позволяет точно выдерживать скорость инициирования.
Кроме того, показанное решение обеспечивает возможность контролирования правильной работы храповой собачки SK с помощью не разрушающих тестов, при этом подъемный механизм переводится в медленное движение опускания, и исполнительный элемент А обесточивается, при этом с помощью датчиков S1 и S2 должны обнаруживаться последовательно все три указанные рабочие состояния храповой собачки SK. В рабочем состоянии, согласно фиг. 3, в котором тормозной храповой диск BS блокируется в режиме опускания, затем может дополнительно повышаться момент электродвигателя для движения опускания, до достижения номинального момента или до начала проскальзывания тормозного элемента на тормозном храповом диске BS. Это можно обнаруживать с помощью кодового датчика троса, датчика вращения или т.п. Таким образом, можно на основании потребляемого приводом тока определять удерживающий момент тормоза и при этом определять, лежит ли определяемое значение внутри предписанного заданного диапазона. Оба теста, т.е. как тест датчиков S1 и S2, так и тест тормозного приспособления, могут быть инициированы как вручную, так и автоматически подъемным механизмом с регулярными интервалами времени. Естественно, результаты тестов оцениваются с помощью управляющего блока и соответствующим образом визуализируются или регистрируются, при этом может быть предусмотрено, что подъемный механизм при неправильной работе или при непонятных обстоятельствах самостоятельно останавливается.

Изобретение относится к способу работы предохранительного тормоза и к предохранительному тормозу для подъемного механизма. Для приведения в действие храповой собачки (SK) предусмотрен подъемный электромагнит или другой электромеханический исполнительный элемент (А), при этом соответствующее положение храповой собачки (SK) контролируется с помощью по меньшей мере двух датчиков (S1, S2). С помощью управляющего блока, предназначенного для обеспечения безопасности, и по меньшей мере одного датчика контролируется движение опускания груза, соответственно подъемного механизма, и в случае неисправности инициируется предохранительное торможение. При этом подъемный электромагнит, соответственно, храповая собачка (SK) расположена так, что с помощью пружинной силы и/или с помощью силы тяжести храповая собачка вводится в зацепление тогда, когда исполнительный элемент, соответственно подъемный электромагнит, обесточен, соответственно отключен от подачи энергии. С помощью этого предохранительного тормоза обеспечивается возможность точного задания и контролирования предельной скорости, при превышении которой должен инициироваться предохранительный тормоз. За счет использования двух датчиков (S1, S2), соответственно выключателей, дополнительно возможно контролирование с помощью управляющего блока функции и движения храповой собачки и распознавание не желательных рабочих состояний, например, в случаях, в которых предохранительный тормоз находится в зацеплении, и привод подъемного механизма продолжает опускать груз. Изобретения обеспечивают повышение надежности торможения. 2 н. и 11 з.п. ф-лы, 3 ил.
1. Предохранительный тормоз для подъемного механизма, при этом по меньшей мере с одним приводом подъемного механизма соединен тормозной храповой элемент (BS), и при этом предусмотрена храповая собачка (SK) для вхождения в зацепление в свободное пространство для собачки тормозного храпового элемента (BS) в случае не допустимой скорости опускания подъемного механизма, при этом тормозной храповый элемент (BS) блокируется, отличающийся тем, что предусмотрен исполнительный элемент (А) для приведения в действие храповой собачки (SK), при этом храповая собачка (SK) и исполнительный элемент (А) выполнены и расположены так, что в состоянии без энергии исполнительного элемента (А) храповая собачка (SK) прилегает к тормозному храповому элементу (BS) или входит в свободное пространство для собачки тормозного храпового элемента (BS), и в состоянии с подачей энергии в исполнительный элемент (А) храповая собачка (SK) отходит от тормозного храпового элемента (BS) или выходит из свободного пространства для собачки и деблокирует тормозной храповой элемент (BS), при этом предусмотрен электронный или цифровой управляющий блок для управление приводом или для приведения в действие исполнительного элемента (А), при этом управляющий блок предназначен для контролирования скорости опускания подъемного механизма, и при превышении допустимой скорости опускания предусмотрен перевод исполнительного элемента (А) в состояние без энергии, и что предусмотрены по меньшей мере два соединенных с управляющим блоком датчика (S1, S2) для определения рабочего состояния храповой собачки (SK), при этом с помощью датчиков (S1, S2) можно относительно рабочего состояния различать по меньшей мере между отведенным состоянием, состоянием прилегания и полностью вдвинутым в свободное пространство для собачки состоянием.
2. Предохранительный тормоз по п. 1, отличающийся тем, что исполнительный элемент (А) является подъемным электромагнитом.
3. Предохранительный тормоз по любому из пп. 1 или 2, отличающийся тем, что свободное пространство для собачки тормозного храпового элемента (BS) имеет такую форму, что храповая собачка (SK) лишь при опускании подъемного механизма при прилегающей к тормозному храповому элементу (BS) храповой собачке полностью заскакивает в свободное пространство для собачки.
4. Предохранительный тормоз по любому из пп. 1-3, отличающийся тем, что предусмотрен управляющий блок для приведения в действие привода подъемного механизма, при этом управляющий блок выполнен так, что в регулярном режиме работы опускание подъемного механизма происходит лишь в состоянии с подачей энергии исполнительного элемента (А).
5. Предохранительный тормоз по п. 4, отличающийся тем, что управляющий блок выполнен так, что в регулярном режиме работы происходит прилегание храповой собачки (SK) к тормозному храповому элементу (BS) лишь при остановленном приводе подъемного механизма.
6. Предохранительный тормоз по любому из пп. 1-5, отличающийся тем, что для контролирования скорости опускания подъемного механизма предусмотрен кодовый датчик троса, который соединен с подъемным механизмом, или датчик скорости вращения, который соединен с приводом подъемного механизма.
7. Предохранительный тормоз по п. 6, отличающийся тем, что кодовый датчик троса или датчик скорости вращения выполнен защищенным от неисправностей или избыточным.
8. Предохранительный тормоз по любому из пп. 1-7, отличающийся тем, что управляющий блок выполнен защищенным от неисправностей или избыточным.
9. Предохранительный тормоз по любому из пп. 1-8, отличающийся тем, что предусмотрен контрольный тест для тестирования по меньшей мере двух датчиков (S1, S2), при этом предусмотрено опускание подъемного механизма при исполнительном элементе (А) без подачи энергии, при этом исполнительный элемент (А) отключается от подачи энергии, и при этом предусмотрена верификация сигналов датчиков (S1, S2) при прилегании и заскакивании храповой собачки (SK).
10. Предохранительный тормоз по любому из пп. 1-9, отличающийся тем, что по меньшей мере один из двоих датчиков (S1, S2) выполнен в виде выключателя.
11. Способ работы предохранительного тормоза для подъемного механизма,
при этом с приводным валом подъемного механизма соединен непосредственно или опосредованно тормозной храповой элемент (BS), и
при этом храповая собачка (SK) входит в свободное пространство для собачки тормозного храпового элемента (BS) в случае не допустимой скорости опускания подъемного механизма,
при этом тормозной храповой элемент (BS) блокируется,
отличающийся тем, что предусмотрен исполнительный элемент (А) для приведения в действие храповой собачки (SK), при этом в состоянии без энергии исполнительного элемента (А) храповая собачка (SK) прижимается к тормозному храповому элементу (BS) или заскакивает в свободное пространство для собачки тормозного храпового элемента (BS), и в состоянии с подачей энергии исполнительного элемента (А) храповая собачка (SK) отводится от тормозного храпового элемента (BS) или выводится из свободного пространства для собачки, и тормозной храповой элемент (BS) освобождается, что с помощью электронного или числового управляющего блока осуществляется приведение в действие исполнительного элемента (А), при этом с помощью управляющего блока контролируется скорость опускания подъемного механизма, и при превышении допустимой скорости опускания исполнительный элемент (А) переводится в состояние без энергии, и
что с помощью по меньшей мере двух датчиков (S1, S2) измеряется соответствующее рабочее состояние храповой собачки (SK), при этом с помощью датчиков (S1, S2) относительно рабочего состояния устанавливается различие по меньшей мере между отведенным состоянием, состоянием прилегания и полностью введенным в свободное пространство для собачки состоянием, и при этом с помощью управляющего блока сигналы двух датчиков (S1, S2) и измеряемая скорость применяются при управлении исполнительным элементом (А) и приводом.
12. Способ по п. 11, отличающийся тем, что в регулярном режиме работы с помощью управляющего блока при определении превышения допустимой скорости опускания и/или при обнаружении состояния прилегания или полностью введенного в свободное пространство для собачки состояния храповой собачки (SK) выключается движение опускания привода.
13. Способ по любому из пп. 11 или 12, отличающийся тем, что выполняется контрольный тест для тестирования по меньшей мере двух датчиков (S1, S2), при этом с помощью управляющего блока привод подъемного механизма при исполнительном элементе (А) без подачи энергии включается в режим опускания, при этом исполнительный элемент (А) переводится в состояние без подачи энергии, при этом верифицируется функция двух датчиков (S1, S2) при прилегании и при заскакивании храповой собачки (SK).
| DE 10148408 C1, 14.11.2002 | |||
| Преобразователь угла поворота вала в код | 1975 |
|
SU525144A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| WO 2013008288 A1, 17 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ТРОСОВЫЙ ПРИВОД С УСТРОЙСТВОМ АВАРИЙНОГО ТОРМОЖЕНИЯ | 2011 |
|
RU2505474C1 |

