Изобретение относится к области позиционирования и определения ориентации рельсового транспорта и может быть использовано при реализации систем автоматического управления движением.
Из уровня техники известно «Устройство оценки положения и способ оценки положения» (патент РФ на изобретение № 2668459, опубликован 01.10.2018). Оценка собственного положения осуществляется по способу устройством, которое обнаруживает положение ориентира для ориентира, присутствующего в окружении подвижного объекта, обнаруживает величину перемещения подвижного объекта и накапливает положения ориентиров, каждый из которых получается посредством перемещения обнаруженного положения ориентира на величину перемещения. Затем получает картографическую информацию, включающую в себя положения ориентиров, присутствующих на карте, посредством контроллера, сопоставляет фрагменты данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценивает собственное положение подвижного объекта, причём определённая область задаётся на основании записей перемещения подвижного объекта, движущегося в текущее положение. Обеспечивается повышение точности оценки собственного положения.
К недостаткам указанного устройства и способа можно отнести использование дорогостоящих систем технического зрения, не позволяющих произвести достоверную оценку позиционирования и определения ориентации подвижного объекта, а также быструю потерю точности оценки положения объекта при потере сигнала GPS.
Известны устройства определения местоположения и ориентации (патент US10234292, опубликован 19.03.2019, и патент US8326532, опубликован 04.12.2012). В соответствии с данными источниками определение ориентации и положение объекта реализуется за счет применения инерциальных датчиков и акселерометров. Однако данные типы датчиков требуют дополнительного времени на настройку и калибровку, в результате чего применение их для систем позиционирования не является целесообразным, учитывая также стоимость их размещения.
Из уровня техники также известен «Способ позиционирования подвижного транспортного объекта» (патент РФ на изобретение № 2811665, опубликован 15.01.2024). Способ позиционирования транспортного объекта (ТО) заключается в том, что в режиме реального времени по данным спутникового навигационного приемника модуль управления ТО определяет текущие координаты своего местоположения, осуществляет их проверку на валидность и при их невалидности передает в вычислитель, установленный на ТО, результаты измерения расстояния ТО до опорного объекта инфраструктуры по данным последних текущих координат местоположения ТО, отвечающих требованиям валидности, одновременно формируя управляющие сигналы для включения установленных на ТО одометра и измерителя модуля линейной скорости. Результаты измерений одометра и измерителя модуля линейной скорости поступают в вычислитель, который по их измерениям с использованием алгоритма робастной фильтрации оценивает текущее приращение пути и дифференцированием по времени - модуль линейной скорости, по результатам оценки текущего приращения пути на основе данных цифровой модели пути и последних валидных координат местоположения ТО вычислитель вычисляет местоположение ТО и расстояние до опорного объекта, которые передает в модуль управления одновременно с оценкой модуля линейной скорости для выработки управления движением ТО.
Данный патент является наиболее близким аналогом. Однако его применение ограничивается только возможностью позиционирования, исключая возможность определения ориентации рельсового транспорта. Указанный недостаток снижает эффективность применения систем автоматического управления для рельсового транспорта, за счет отсутствия возможности корректного контроля профиля скорости.
Задачей данного изобретения является обеспечение систем автоматического управления точной информацией о положении и ориентации рельсового транспорта, для повышения эффективности их применения.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении точности позиционирования и определения ориентации рельсового транспорта.
Указанный технический результат достигается способом позиционирования и определения ориентации рельсового транспорта с использованием информации о карте путей в арочно-линейном виде заключающимся в том, что предварительно составляется цифровая карта маршрута движения рельсового транспорта, представляющая из себя линейно-арочный сплайн, который записывается в виде текстового файла в память вычислительного блока, установленного в рельсовом транспорте, также в память вычислительного блока записывают информацию о местоположение датчика GPS в составе рельсового транспорта и линейные характеристики размеров рельсового транспорта, в момент движения рельсового транспорта с датчика GPS в вычислительный блок поступает информация об уровне спутникового сигнала GPS и координаты для расчета в вычислительном блоке расстояния от начала сплайна до проекции точки положения рельсового транспорта на сплайне, при уровне сигнала ниже заданного расстояние от начала сплайна до проекции точки положения рельсового транспорта на сплайне рассчитывается в вычислительном блоке по информации полученной с блока одометра, далее на основе полученной проекции точки положения трамвая на сплайне по заданному алгоритму в вычислительном блоке рассчитывается угол ориентация трамвая, который может быть использован для автоматического контроля профиля скорости в системах автоматического управления движением.
Технические решения применяемый в составе данного изобретения позволяют провести оценку позиционирования и определение ориентации рельсового транспорта за счет информации полученной только от датчика GPS и одометра, за счет применения в составе вычислительного блока алгоритма расчета позиционирования и ориентации с использованием информации о линейных размерах рельсового транспорта и местоположении датчика GPS, а также цифровой карте маршрута рельсового транспорта представленной в виде линейно-арочного сплайна.
Для описания данного изобретения и раскрытия технических признаков, будет приведен пример применения разработанного способа позиционирования и определения ориентации в составе трехсекционного трамвая, однако указанные технические признаки могут быть применены на любом типе рельсового транспорта.
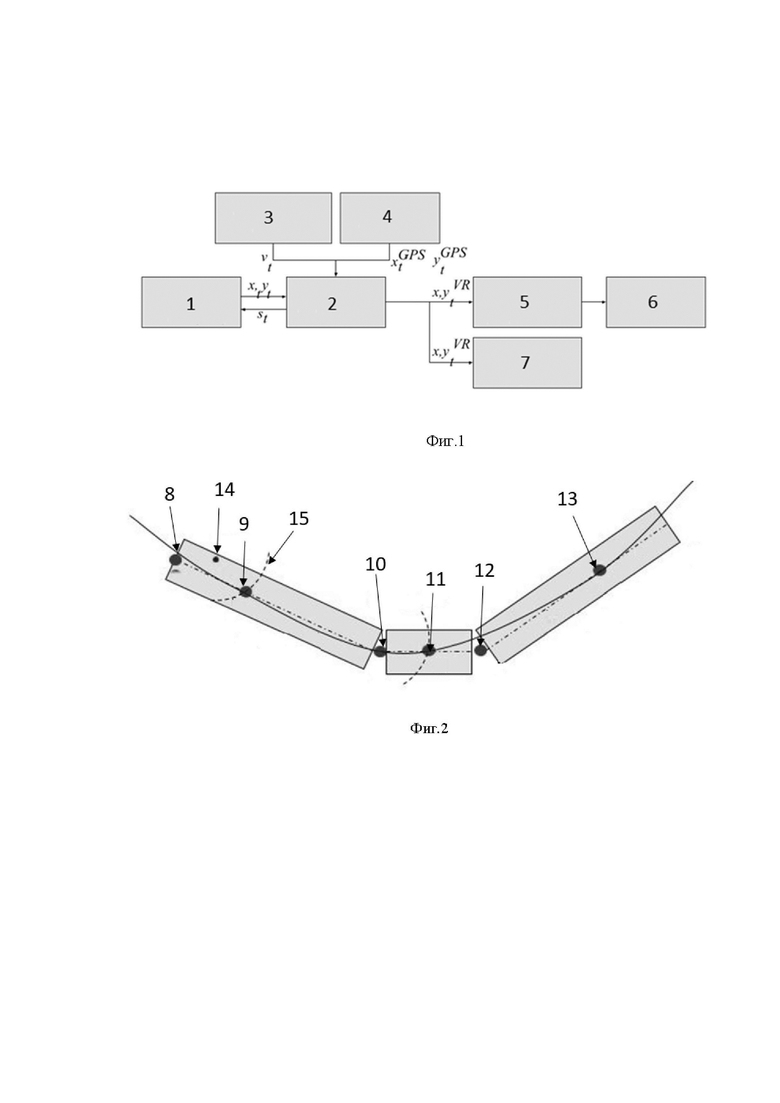
Техническая сущность изобретения поясняется чертежами. На фиг.1 изображена схема обмена данными для способа позиционирования и определения ориентации. На фиг.2 изображено расположение точек расчета для алгоритма определения ориентации.
Схема обмена данными для способа позиционирования и определения ориентации содержит:
1. Память вычислительного блока, содержащая цифровую карту маршрута, информацию о местоположении датчика GPS и линейные характеристики рельсового транспорта;
2. Вычислительный блок;
3. Датчик GPS;
4. Одометр;
5. Блок распознавания светофоров;
6. Система технического зрения;
7. Система автоматического управления.
Для расчета в алгоритме определения ориентации используются следующие точки расчета:
8. Точка переднего бампера трамвая (VR);
9. Точка пересечения сплайна первой секции трамвая (F);
10. Точка сочленения первой и второй секции трамвая (R);
11. Точка середины второй секции трамвая (М);
12. Точка сочленения второй и третей секции трамвая (R1);
13. Точка пересечения сплайна третьей секции трамвая (F1);
14. Точка установки GPS датчика (Pgps);
15. Точка расчета радиуса (r).
В предпочтительном варианте исполнения изобретение осуществляется следующим образом.
На первом этапе осуществляется подготовка цифровой карты маршрута движения трамвая – представленной в виде линейно-арочного сплайна, это значит, что маршрут движения представлен кривой, состоящей из линейных и дугообразных элементов, связанных с друг другом. Который далее записывается в память (1) вычислительного блока (2) в виде текстового файла описывающего поведение функции f(x,y).
где  – некоторая функция (сплайн) аппроксимирующая путь,
– некоторая функция (сплайн) аппроксимирующая путь, – координаты произвольной точки и
– координаты произвольной точки и  - расстояние от начала сплайна до проекции точки
- расстояние от начала сплайна до проекции точки  на сплайне.
на сплайне.
Также в память (1) вычислительного блока (2) записывается информация о местоположении точки (14) размещения датчика GPS (3) на трехсекционномго трамвае и линейные характеристики (размеры) трехсекционного трамвая.
В момент движения трехсекционного трамвая с блока GPS (3) в вычислительный блок (2) поступают координаты GPS ( ). Где
). Где  координаты места установки блока GPS, а
координаты места установки блока GPS, а  – уровень спутникового сигнала.
– уровень спутникового сигнала.
Далее исходя из исходя из параметров размещения датчика GPS на крыше  (14) в вычислительном блоке (2) определяется величина :
(14) в вычислительном блоке (2) определяется величина :

В случае, если сигнал с датчика GPS имеет точность ниже заданной, то перемещение трамвая формируется по информации с блока одометра (4).
Для данных одометра (4) счисление расстояния от начала сплайна до проекции точки положения трамвая на сплайне в вычислительном блоке (2) производиться по формулам:

Где  ,
,  –скорость движения трамвая по одометрическому датчику (4).
–скорость движения трамвая по одометрическому датчику (4).
Далее по известному положению точки проекции трамвая на сплайна , рассчитывается ориентация трехсекционного трамвая. Точка VR (8) обозначает начало системы координат трамвая и соответствует положению его переднего бампера. Точка F (9) является точкой расположения первой тележки трамвая и соответствует отметки пути .
Точка М (11) – середина второй секции трамвая (положение центра второй тележки трамвая), точка установки GPS (14) место установки GPS датчика, точка R (10) – точка сочленения первой и второй секции трамвая. Известными конструктивными параметрами трамвая являются: координаты Pgps точки установки GPS (14) в системе координат трамвая, расстояния от точки VR (8) до точки F (9), расстояние от точки М (11) до R (10), расстояние от точки F (9) до точки R (10), расстояние от R1 (12) до F1 (13) и расстояние от F1 (13) до конца трамвая.
Определение положения трамвая заключается в определении положения указанных выше точек F (9), VR (8), R 10), M (11), R1 (12) и F1 (13) в глобальной системе координат.
Для определения координат данных точек используют следующий алгоритм, заданный в вычислительном блоке (2).
Поскольку точно известно, что точки F (9), M (11), F1 (13) лежат на рельсовом пути и как следствие на сплайне, координаты точки F (9) могут быть найдены как точка пересечения сплайна и окружности с центром в точке GPS и некоторым радиусом r (15) и координатами GPS из следующей зависимости:

Решение данной задачи осуществляется итеративно, методом приближения, проверяются все точки на сплайне в некоторой окрестности и выбирается та, которая удовлетворяет заданному расстоянию радиуса r (15).
Располагая координатами точки F (9) и зная расстояние от точки М (11) до R (10) можно рассчитать координаты местоположения точки R (10), по формуле:


Координаты точки M (11) также рассчитываются итерационного исходя из двух условий, точка М (11) точно лежит на сплайне и точка R (10) и M связаны расстоянием base_mid, тогда

Координаты переднего бампера точки VR (8) могут быть найдены исходя из того, что 

В обратной последовательности вычисляются координаты и других точек, таких как R1 (12) и F1 (13).
По найденным координатам точек трамвая F (9) и VR (8) определяется угол ориентация трамвая:

Полученные в соответствии с описанным алгоритмом значения ориентации и позиционирования трамвая могут быть переданы в систему автоматического управления трамвая (7) для коррекции профиля скорости передвижения, а также в блоки распознавания светофоров (5) и систему технического зрения (6) для повышения эффективности применения систем автоматического управления движением рельсового транспорта.
Таким образом описанный способ применяется для задачи позиционирования и определения ориентации рельсового транспорта, при которой для повышения точности используется комплексирование данных, полученных от датчика GPS и одометра, с использованием цифровой карты маршрута в виде сплайна и линейных характеристик размеров рельсового транспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Способ позиционирования наземного транспортного средства | 2021 |
|
RU2769918C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ ОРГАНИЗАЦИИ АУДИОВИЗУАЛЬНОЙ ИНФОРМАЦИОННОЙ СИСТЕМЫ В ТРАНСПОРТЕ | 2015 |
|
RU2631090C2 |
| Устройство для позиционирования рельсового транспорта | 2021 |
|
RU2768805C1 |
| Устройство для позиционирования рельсового транспорта | 2022 |
|
RU2786255C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
Изобретение относится к определению местоположения подвижного состава. Способ позиционирования и определения ориентации рельсового транспорта с использованием информации о карте путей в арочно-линейном виде заключается в том, что предварительно составляют цифровую карту маршрута движения рельсового транспорта, представляющую из себя линейно-арочный сплайн, который записывают в виде текстового файла в память вычислительного блока, установленного в рельсовом транспорте, также в память вычислительного блока записывают информацию о местоположение датчика GPS в составе рельсового транспорта и линейные характеристики размеров рельсового транспорта. В момент движения рельсового транспорта с датчика GPS в вычислительный блок поступает информация об уровне спутникового сигнала GPS и координаты для расчета расстояния от начала сплайна до проекции точки положения рельсового транспорта на сплайне, далее на основе полученной проекции точки положения трамвая на сплайне по заданному алгоритму рассчитывают угол ориентации трамвая. Технический результат заключается в повышении точности позиционирования и определения ориентации рельсового транспорта. 1 з.п. ф-лы, 2 ил.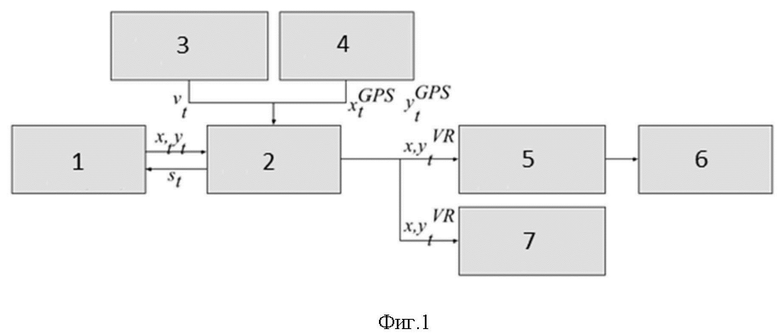
1. Способ позиционирования и определения ориентации рельсового транспорта с использованием информации о карте путей в арочно-линейном виде, заключающийся в том, что предварительно составляется цифровая карта маршрута движения рельсового транспорта, представляющая из себя линейно-арочный сплайн, который записывается в виде текстового файла в память вычислительного блока, установленного в рельсовом транспорте, также в память вычислительного блока записывается информация о местоположение датчика GPS в составе рельсового транспорта и линейные характеристики размеров рельсового транспорта, в момент движения рельсового транспорта с датчика GPS в вычислительный блок поступает информация об уровне спутникового сигнала GPS и координаты для расчета в вычислительном блоке расстояния от начала сплайна до проекции точки положения рельсового транспорта на сплайне, далее на основе полученной проекции точки положения трамвая на сплайне по заданному алгоритму в вычислительном блоке рассчитывается угол ориентации трамвая, который может быть использован для автоматического контроля профиля скорости в системах автоматического управления движением.
2. Способ позиционирования и определения ориентации рельсового транспорта с использованием информации о карте путей в арочно-линейном виде по п.1, отличающийся тем, что при уровне сигнала GPS ниже заданного расстояние от начала сплайна до проекции точки положения рельсового транспорта на сплайне рассчитывается по информации, полученной с одометра в составе рельсового транспорта.
| Способ позиционирования подвижного транспортного объекта | 2023 |
|
RU2811665C1 |
| US 2022024504 A1, 27.01.2022 | |||
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОЕЗДОВ С ПРОВЕРКОЙ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ДОСТОВЕРНОСТИ ОЦЕНКИ ПОЛОЖЕНИЯ | 2011 |
|
RU2584957C2 |

