Область техники
Настоящее изобретение относится к способу для управления тормозным устройством и к устройству управления торможением для управления тормозной силой множества буксируемых транспортных средств, которые буксируются посредством буксирующего транспортного средства.
Уровень техники
В технологии для управления комбинированным транспортным средством, которое содержит буксирующее транспортное средство и множество буксируемых транспортных средств, требуется, чтобы толчки и вибрации буксируемых транспортных средств, которые формируются вследствие удлинения сцепок, которые соединяют комбинированное транспортное средство, подавлялись во время трогания с места комбинированного транспортного средства.
Например, известна технология, в которой в локомотиве, который буксирует пассажирские вагоны, когда локомотив ускоряется для того, чтобы трогаться с места, увеличение ускорения подавляется сразу после того, как начинается ускорение, и ускорение увеличивается после того, как определенная величина растягивающей нагрузки прикладывается между пассажирскими вагонами для того, чтобы улучшать внезапные изменения крутящего момента, которые формируются посредством пассажирских вагонов (см. публикацию JP 2004-49000).
Задача, решаемая изобретением
Тем не менее, в предшествующем уровне техники, описанном выше, поскольку увеличение ускорения подавляется некоторое время после начала ускорения локомотива, имеется проблема в том, что начальное перемещение локомотива задерживается, и в том, что требуется длительное время до тех пор, пока локомотив не достигнет целевого ускорения.
Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, как быстро ускорять комбинированное транспортное средство при подавлении толчков и вибраций буксируемых транспортных средств при трогании с места комбинированного транспортного средства.
Средство достижения цели
Настоящее изобретение разрешает проблему, описанную выше, посредством управления временем, когда тормозная сила прикладывается к буксируемым транспортным средствам, когда буксирующее транспортное средство трогается с места, в комбинированном транспортном средстве, в котором буксирующее транспортное средство и буксируемое транспортное средство или транспортные средства, соответственно, сцепляются друг с другом посредством сцепок.
Преимущества изобретения
Согласно настоящему изобретению, поскольку тормозная сила прикладывается с началом в порядке от буксируемого транспортного средства, расположенного на задней стороне, когда буксирующее транспортное средство трогается с места, сцепки удлиняются до соответствующей длины за короткий период времени. Как результат, сцепки находятся в надлежащем удлиненном состоянии в момент времени, в который буксирующее транспортное средство начинает ускоряться для того, чтобы трогаться с места, и появляется возможность трогания с места комбинированного транспортного средства при подавлении толчков и вибраций буксируемых транспортных средств и быстрого ускорения комбинированного транспортного средства.
Краткое описание чертежей
Фиг. 1 - схематичный вид, иллюстрирующий один пример комбинированного транспортного средства, содержащего устройство управления торможением согласно варианту осуществления настоящего изобретения;
Фиг. 2 - блок-схема комбинированного транспортного средства, содержащего устройство управления торможением согласно варианту осуществления настоящего изобретения;
Фиг. 3A - схематичный вид (часть 1), иллюстрирующий один пример способа для прикладывания тормозной силы к буксируемым транспортным средствам посредством устройства управления торможением согласно варианту осуществления настоящего изобретения;
Фиг. 3B - схематичный вид (часть 2), иллюстрирующий один пример способа для прикладывания тормозной силы к буксируемым транспортным средствам посредством устройства управления торможением согласно варианту осуществления настоящего изобретения;
Фиг. 3C - схематичный вид (часть 3), иллюстрирующий один пример способа для прикладывания тормозной силы к буксируемым транспортным средствам посредством устройства управления торможением согласно варианту осуществления настоящего изобретения; и
Фиг. 4 - временная диаграмма, иллюстрирующая один пример времени, в которое тормозная сила прикладывается к буксируемым транспортным средствам посредством устройства управления торможением согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Ниже описывается комбинированное транспортное средство, содержащее устройство управления торможением согласно варианту осуществления настоящего изобретения, на основе чертежей.
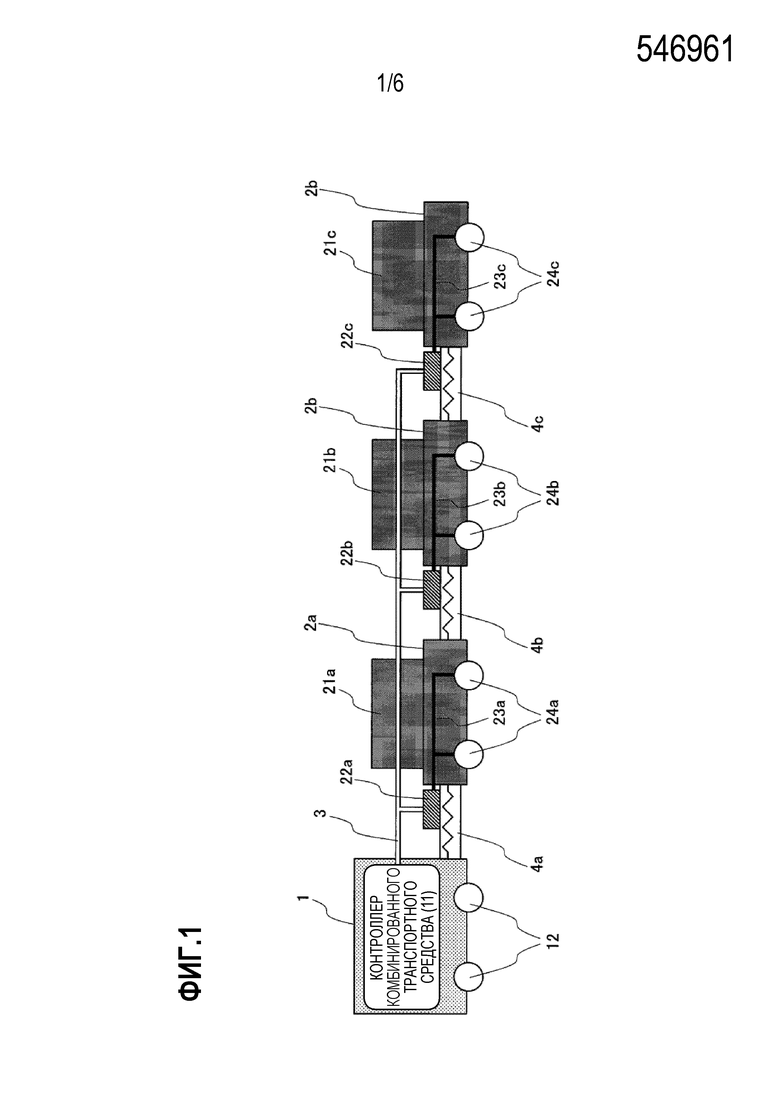
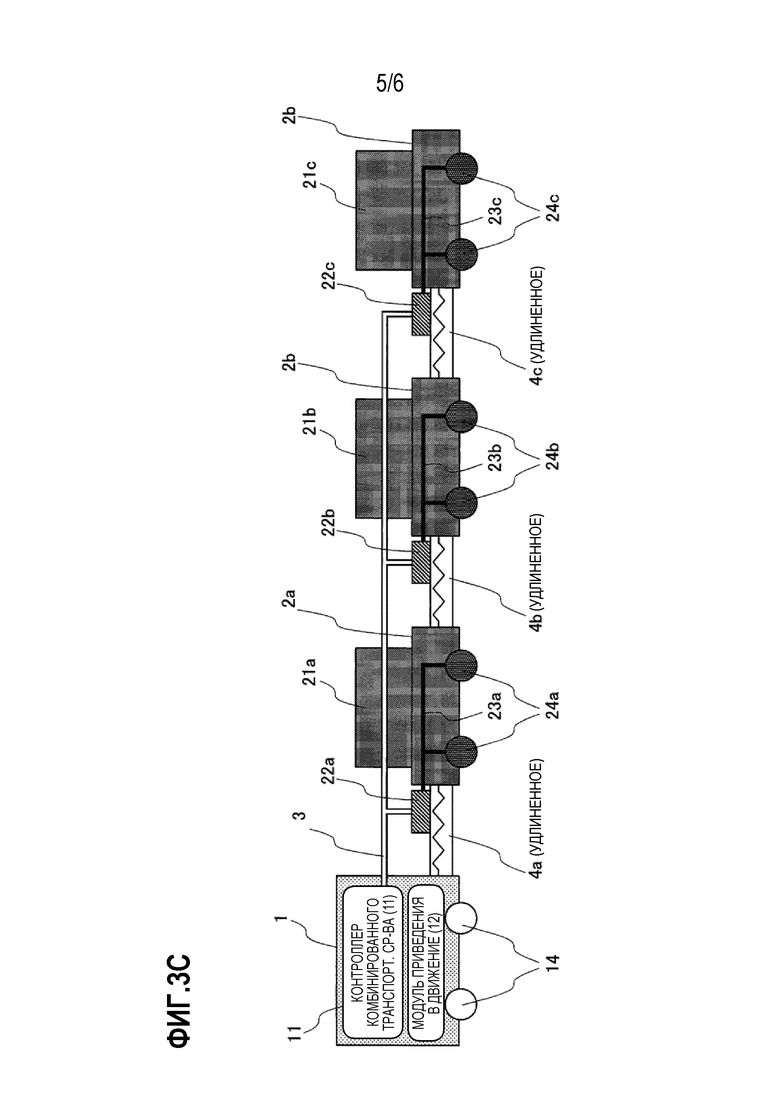
Фиг. 1 является схематичным видом, иллюстрирующим сценарий, в котором буксирующее транспортное средство 1, содержащее устройство 111 управления торможением настоящего варианта осуществления, пытается выполнять трогание с места комбинированного транспортного средства, содержащего буксирующее транспортное средство 1 и буксируемые транспортные средства 2a-2c, при буксировке трех буксируемых транспортных средств 2a-2c. В настоящем варианте осуществления, конфигурация комбинированного транспортного средства реализована посредством соответствующего сцепления буксирующего транспортного средства 1 и буксируемых транспортных средств 2a-2c через сцепки 4a-4c. В частности, конфигурация комбинированного транспортного средства реализована посредством сцепления буксирующего транспортного средства 1 и буксируемого транспортного средства 2a через сцепку 4a, сцепления буксируемого транспортного средства 2a и буксируемого транспортного средства 2b через сцепку 4b и сцепления буксируемого транспортного средства 2b и буксируемого транспортного средства 2c через сцепку 4c. Нагрузки 21a-21c, соответственно, прикладываются на буксируемые транспортные средства 2a-2c. На фиг. 1, показан пример, в котором представлено три буксируемых транспортных средства; тем не менее, число буксируемых транспортных средств не ограничено и может составлять любое число, большее или равное двум.
Буксирующее транспортное средство 1 и буксируемые транспортные средства 2a-2c, которые конфигурируют комбинированное транспортное средство, не ограничены конкретным образом и могут представлять собой автомобили, которые могут двигаться по дорогам, или железнодорожные вагоны, которые движутся по рельсам. Помимо этого, буксирующее транспортное средство 1 может представлять собой любое транспортное средство, которое может двигаться при буксировке буксируемых транспортных средств 2a-2c, и включает в себя, например, транспортные средства, которые движутся с использованием электромотора, двигателя внутреннего сгорания, парового двигателя и т.п. в качестве первичного двигателя.
В настоящем варианте осуществления, сцепки 4a-4c не ограничены конкретным образом, и в примере, проиллюстрированном на фиг. 1, используются сцепки, которые могут растягиваться и сжиматься в соответствии с ускорением буксирующего транспортного средства 1. Таким образом, сцепки 4a-4c допускают растягивание в соответствии с ускорением буксирующего транспортного средства 1 и допускают сжатие в соответствии с замедлением буксирующего транспортного средства 1. Например, упругие элементы включены в сцепки 4a-4c, и можно заставлять сцепки 4a-4c растягиваться и сжиматься посредством растягивания и сжатия упругих элементов в соответствии с ускорением буксирующего транспортного средства 1.
Буксирующее транспортное средство 1 содержит контроллер 11 комбинированного транспортного средства для управления приведением в движение и торможением комбинированного транспортного средства и модуль 12 приведения в движение для приведения в движение буксирующего транспортного средства 1, как проиллюстрировано на фиг. 1. Контроллер 11 комбинированного транспортного средства соединяется с устройствами 22a-22c управления, которые, соответственно, предоставляются в буксируемых транспортных средствах 2a-2c, через сцепную схему 3, как проиллюстрировано на фиг. 1. Устройства 22a-22c управления, которые соединяются с контроллером 11 комбинированного транспортного средства, имеют возможность, соответственно, активировать тормоза 24a-24c буксируемых транспортных средств 2a-2c через рабочие тормозные схемы 23a-23c, чтобы прикладывать тормозную силу к колесам буксируемых транспортных средств 2a-2c.
Тормоза 24a-24c не ограничены конкретным образом, и можно использовать дисковый тормоз или барабанный тормоз, который активируется посредством управления давлением текучей среды для текучей среды (масла, сжатого воздуха и т.п.) с помощью устройств 22a-22c управления. Альтернативно, тормоза 24a-24c могут прикладывать тормозную силу независимо от давления текучей среды, и, например, может использоваться электрическое тормозное устройство.
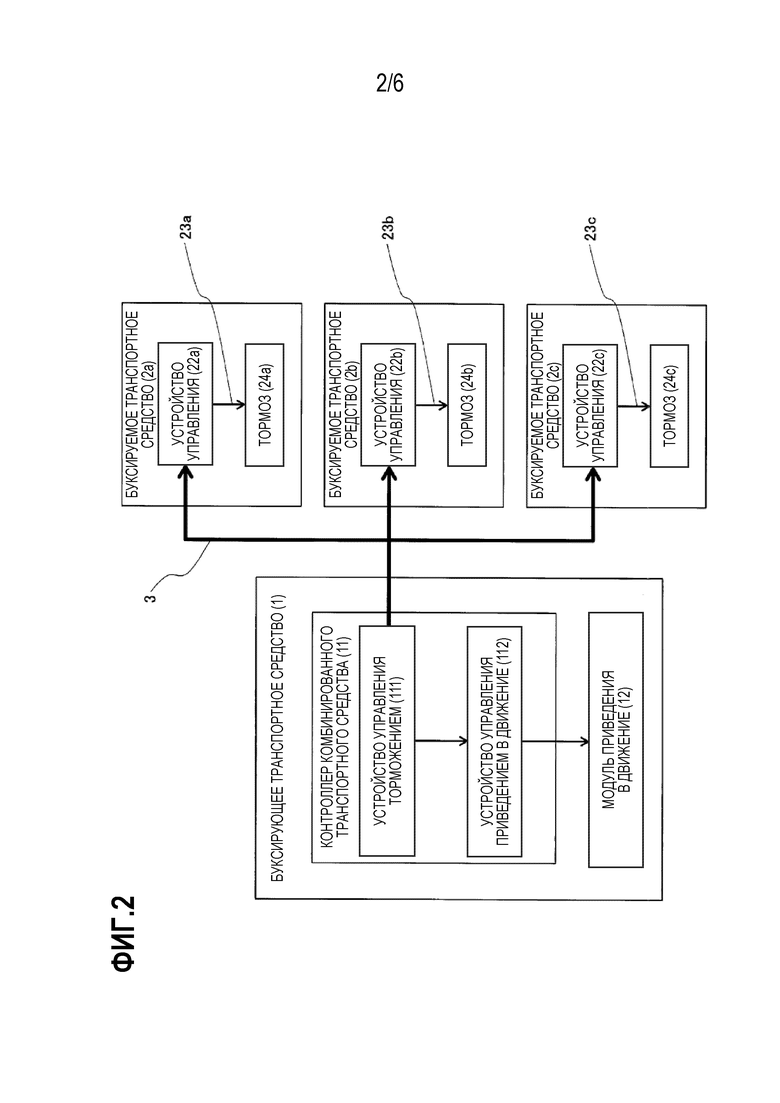
Здесь, фиг. 2 является блок-схемой комбинированного транспортного средства настоящего варианта осуществления. Контроллер 11 комбинированного транспортного средства буксирующего транспортного средства 1 содержит устройство 111 управления торможением для прикладывания тормозной силы к буксируемым транспортным средствам 2a-2c и устройство 112 управления приведением в действие для приведения в действие модуля 12 приведения в движение буксирующего транспортного средства 1, чтобы ускорять буксирующее транспортное средство 1, как проиллюстрировано на фиг. 2. В настоящем варианте осуществления, как описано выше, устройство 111 управления торможением, предоставленное относительно контроллера 11 комбинированного транспортного средства, инструктирует устройствам 22a-22c управления буксируемых транспортных средств 2a-2c через сцепную схему 3 активировать тормоза 24a-24c, чтобы прикладывать тормозную силу к буксируемым транспортным средствам 2a-2c. Хотя не показано на фиг. 1 и 2, тормоз может предоставляться в буксирующем транспортном средстве 1, и устройство 111 управления торможением может активировать тормоз буксирующего транспортного средства 1, чтобы прикладывать тормозную силу к буксирующему транспортному средству 1.
В настоящем варианте осуществления, следящее управление выполняется в комбинированном транспортном средстве, имеющем такую конфигурацию. Таким образом, в то время, когда комбинированное транспортное средство остановлено до того, как комбинированное транспортное средство трогается с места, устройство 111 управления торможением последовательно прикладывает тормозную силу к каждому из буксируемых транспортных средств, т.е. относительно буксируемых транспортных средств 2a-2c и приводит в действие модуль 12 приведения в движение буксирующего транспортного средства 1. За счет этого можно удлинять длину сцепок 4a-4c до величины растягивания, которая соответствует моменту, когда буксирующее транспортное средство 1 ускоряется при целевом ускорении, в момент времени, в который комбинированное транспортное средство фактически трогается с места. Таким образом, поскольку сцепки 4a-4c растягиваются и сжимаются в соответствии с ускорением буксирующего транспортного средства 1, как описано выше, в настоящем варианте осуществления, посредством прикладывания тормозной силы к буксируемым транспортным средствам 2a-2c когда комбинированное транспортное средство трогается с места, можно удлинять сцепки 4a-4c до длины, которая соответствует моменту, когда буксирующее транспортное средство 1 ускоряется при целевом ускорении. В это время, устройство 111 управления торможением прикладывает большую тормозную силу к буксируемым транспортным средствам 2a-2c по мере того, как растягивающая нагрузка, которая, как прогнозируется, должна прикладываться к сцепкам 4a-4c, когда буксирующее транспортное средство 1 ускоряется при целевом ускорении, становится больше. За счет этого можно растягивать сцепки 4a-4c до соответствующей длины.
После этого, в настоящем варианте осуществления, все тормозные силы, которые прикладываются к буксируемым транспортным средствам 2a-2c, прекращают действовать, и буксирующее транспортное средство 1 приводится в движение, чтобы выполнять трогание с места комбинированного транспортного средства. Поскольку комбинированное транспортное средство в силу этого трогается с места в состоянии, в котором сцепки 4a-4c надлежащим образом растягиваются, появляется возможность быстро ускорять комбинированное транспортное средство при подавлении толчков и вибраций буксируемых транспортных средств 2a-2c, которые формируются вследствие растягивания и сжатия сцепок 4a-4c.
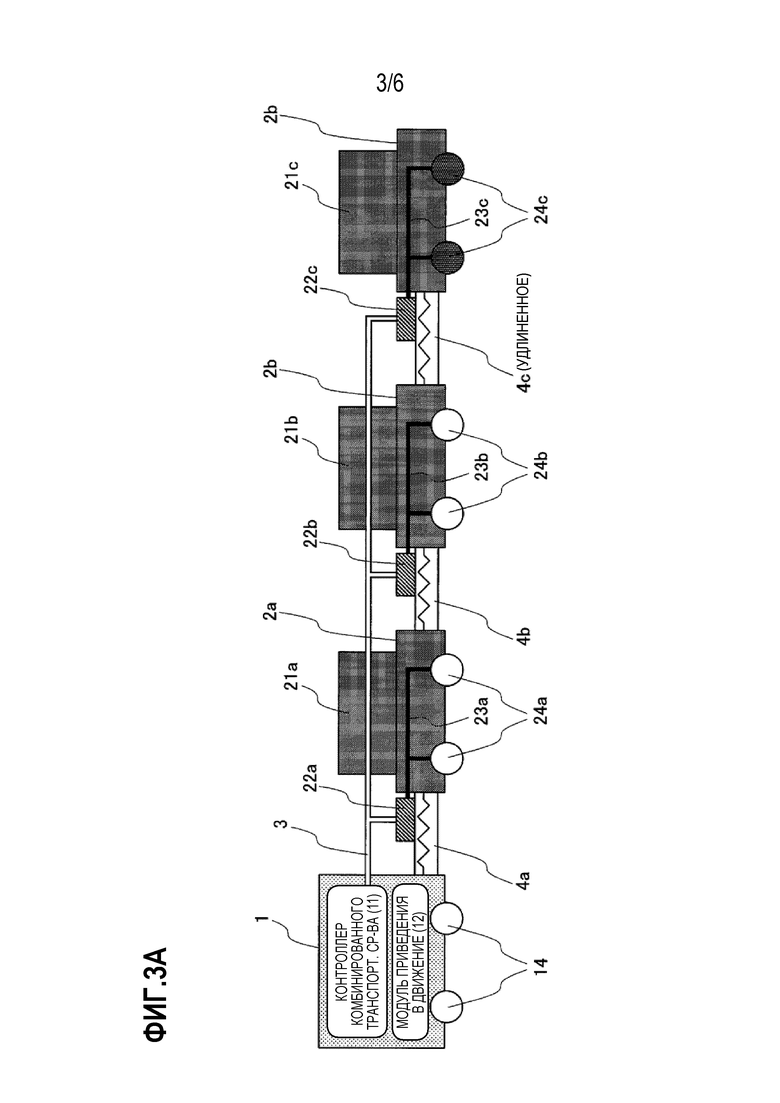
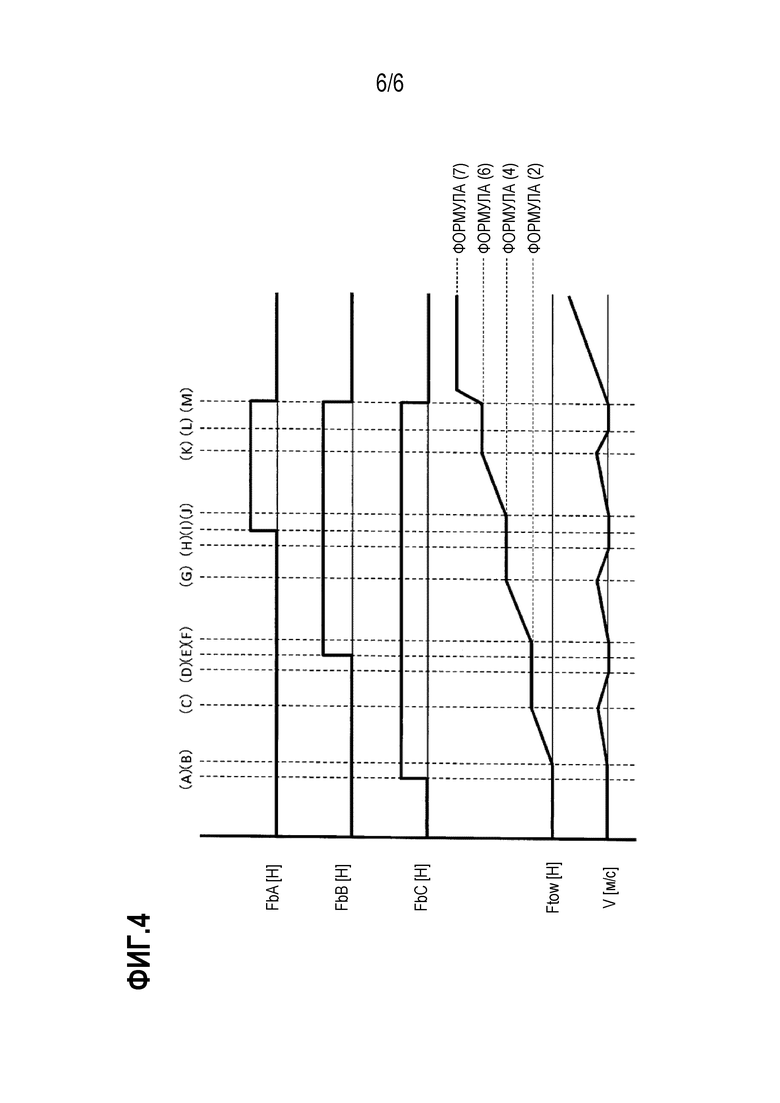
Здесь, описывается один пример способа для прикладывания тормозной силы к буксируемым транспортным средствам 2a-2c через устройство 111 управления торможением при трогании с места комбинированного транспортного средства со ссылкой на фиг. 3A-3C и фиг. 4. Фиг. 3A-3C являются схематичными видами, иллюстрирующими состояние комбинированного транспортного средства при прикладывании тормозной силы к буксируемым транспортным средствам 2a-2c, и тормоза 24a-24c, к которым прикладывается тормозная сила, указываются посредством затенения. Помимо этого, фиг. 4 является временной диаграммой, иллюстрирующей время, в которое тормозная сила прикладывается к буксируемым транспортным средствам 2a-2c, и время, в которое буксирующее транспортное средство 1 принудительно формирует тяговую силу. Фиг. 4 также иллюстрирует изменения скорости буксирующего транспортного средства 1 вследствие растягивания сцепок 4a-4c, вызываемого посредством буксирующего транспортного средства 1, формирующего тяговую силу.
В сценарии, показанном на фиг. 3A-3C, предполагается, что коэффициент сопротивления крену колес буксируемых транспортных средств 2a-2c, соответственно, составляет μA, μB и μC, что общий вес буксируемых транспортных средств 2a-2c, включающих в себя нагрузки 21a-21c, составляет, соответственно, MA, MB и MC, и что буксирующее транспортное средство 1 пытается выполнять трогание с места комбинированного транспортного средства при целевом ускорении aref (единицами являются м/с2).
В настоящем варианте осуществления, во время (A) временной диаграммы, показанной на фиг. 4, устройство 111 управления торможением прикладывает тормозную силу FbC к буксируемому транспортному средству 2c, расположенному на самой задней стороне комбинированного транспортного средства, посредством нажатия тормоза 24c, как проиллюстрировано на фиг. 3A. Здесь, тормозная сила FbC, которая прикладывается к буксируемому транспортному средству 2c, должна быть значением, показанным в нижеприведенной формуле (1) (единицами являются Н).
FbC≥MC*aref+μC*MC (1)
Затем, во времена (B)-(C), показанные на фиг. 4, модуль 12 приведения в движение приводится в действие посредством устройства 112 управления приведением в действие буксирующего транспортного средства 1, и тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до значения, показанного в нижеприведенной формуле (2) (единицами являются Н).
Ftow=MC*aref+μC*MC (2)
Таким образом, в настоящем варианте осуществления, тормозная сила прикладывается к буксируемому транспортному средству 2c таким образом, что буксируемое транспортное средство 2c не перемещается во время (A) на фиг. 4; после этого, буксирующее транспортное средство 1 формирует тяговую силу Ftow в степени, которая должна ускорять буксируемое транспортное средство 2c при целевом ускорении aref во времена (B)-(C), показанные на фиг. 4. Как результат, растягивающая нагрузка, которая прикладывается к сцепке 4c, которая соединяется с буксируемым транспортным средством 2c, достигает порогового значения N4c, которое задается заранее относительно сцепки 4c (значения растягивающей нагрузки, которая, как прогнозируется, должна прикладываться к сцепке 4c, когда комбинированное транспортное средство ускоряется при целевом ускорении aref), и сцепка 4c должна растягиваться до длины, которая является эквивалентной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref. В этом случае, в течение периода между (B)-(C), показанного на фиг. 4, буксирующее транспортное средство 1 движется вперед вследствие удлинения сцепки 4c, и скорость V (единицами являются м/с), незначительно увеличивается. После этого, поскольку растягивание сцепки 4c прекращается, скорость буксирующего транспортного средства 1 уменьшается в течение периода между (C)-(D), показанного на фиг. 4, и буксирующее транспортное средство 1 в конечном счете останавливается.
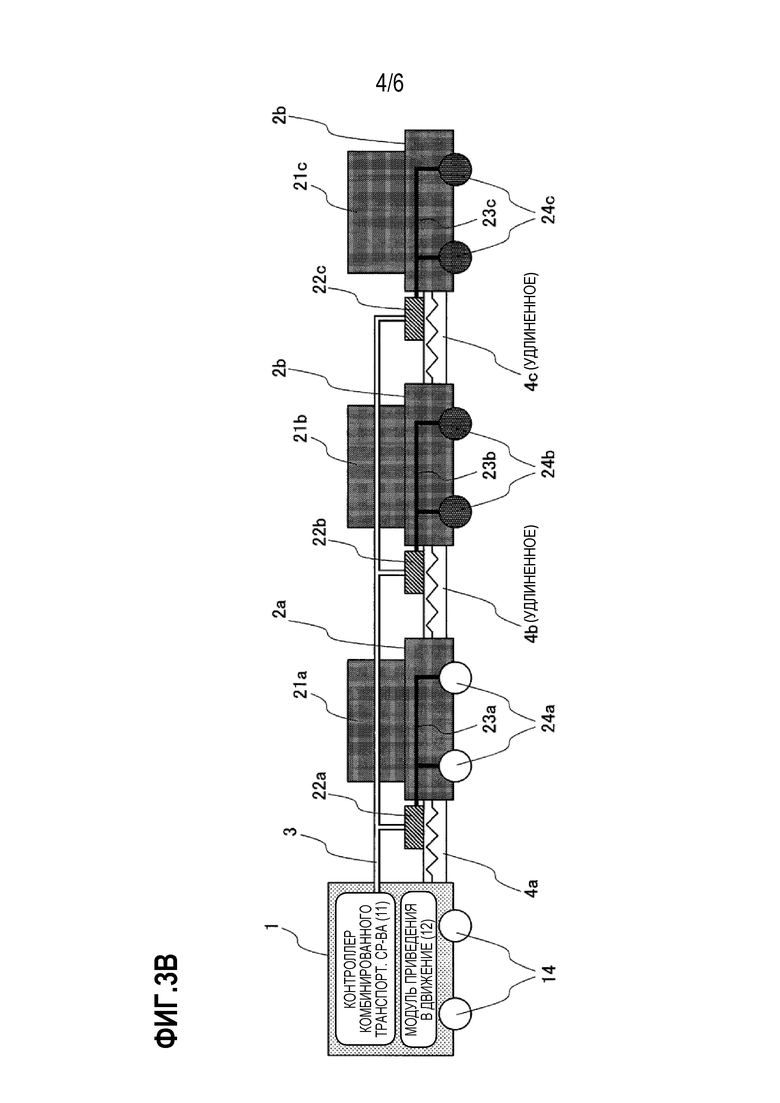
Затем, в настоящем варианте осуществления, во время (E) на временной диаграмме, показанной на фиг. 4, устройство 111 управления торможением прикладывает тормозную силу FbB к буксируемому транспортному средству 2b посредством нажатия тормоза 24b, как проиллюстрировано на фиг. 3B. Здесь, тормозная сила FbB, которая прикладывается к буксируемому транспортному средству 2b, должна быть значением, показанным в нижеприведенной формуле (3).
FbB≥(MC+MB)*aref+μC*MC+μB*MB (3)
Затем, во времена (F)-(G), показанные на фиг. 4, модуль 12 приведения в движение приводится в действие посредством устройства 112 управления приведением в действие буксирующего транспортного средства 1, и тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до значения, показанного в нижеприведенной формуле (4).
Ftow=(MC+MB)*aref+μC*MC+μB*MB (4)
Таким образом, в настоящем варианте осуществления, тормозная сила прикладывается к буксируемому транспортному средству 2b таким образом, что буксируемое транспортное средство 2b не перемещается во время (E) на фиг. 4; после этого, тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до степени, в которой можно ускорять буксируемое транспортное средство 2c и буксируемое транспортное средство 2b при целевом ускорении aref во времена (F)-(G), показанные на фиг. 4. Как результат, растягивающая нагрузка, которая прикладывается к сцепке 4b, которая соединяется с буксируемым транспортным средством 2b, достигает порогового значения N4b, которое задается заранее относительно сцепки 4b (значения растягивающей нагрузки, которая, как прогнозируется, должна прикладываться к сцепке 4b, когда комбинированное транспортное средство ускоряется при целевом ускорении aref), и сцепка 4b должна растягиваться до длины, которая является эквивалентной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref. В этом случае, в течение периода между (F)-(G), показанного на фиг. 4, буксирующее транспортное средство 1 движется вперед вследствие удлинения сцепки 4b, и скорость V незначительно увеличивается. После этого, поскольку растягивание сцепки 4b прекращается, скорость буксирующего транспортного средства 1 уменьшается в течение периода между (G)-(H), показанного на фиг. 4, и буксирующее транспортное средство 1 в конечном счете останавливается.
Затем, в настоящем варианте осуществления, во время (I) на временной диаграмме, показанной на фиг. 4, устройство 111 управления торможением прикладывает тормозную силу FbA к буксируемому транспортному средству 2a посредством нажатия тормоза 24a, как проиллюстрировано на фиг. 3C. Здесь, тормозная сила FbA, которая прикладывается к буксируемому транспортному средству 2a, должна быть значением, показанным в нижеприведенной формуле (5).
FbB≥(MC+MB+MC)*aref+μC*MC+μB*MB+μA*MA (5)
Затем, во времена (J)-(K), показанные на фиг. 4, модуль 12 приведения в движение приводится в действие посредством устройства 112 управления приведением в действие буксирующего транспортного средства 1, и тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до значения, показанного в нижеприведенной формуле (6).
Ftow=(MC+MB+MC)*aref+μC*MC+μB*MB+μA*MA (6)
Таким образом, в настоящем варианте осуществления, тормозная сила прикладывается к буксируемому транспортному средству 2a таким образом, что буксируемое транспортное средство 2a не перемещается во время (I) на фиг. 4; после этого, тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до степени, в которой можно ускорять буксируемые транспортные средства 2a-2c при целевом ускорении aref во времена (J)-(K), показанные на фиг. 4. Как результат, растягивающая нагрузка, которая прикладывается к сцепке 4a, которая соединяется с буксируемым транспортным средством 2a, достигает порогового значения N4a, которое задается заранее относительно сцепки 4a (значения растягивающей нагрузки, которая, как прогнозируется, должна прикладываться к сцепке 4a, когда комбинированное транспортное средство ускоряется при целевом ускорении aref), и сцепка 4a должна растягиваться до длины, которая является эквивалентной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref. В этом случае, в течение периода между (J)-(K), показанного на фиг. 4, буксирующее транспортное средство 1 движется вперед вследствие удлинения сцепки 4a, и скорость V незначительно увеличивается. После этого, поскольку растягивание сцепки 4a прекращается, скорость буксирующего транспортного средства 1 уменьшается в течение периода между (K)-(L), показанного на фиг. 4, и буксирующее транспортное средство 1 в конечном счете останавливается.
После этого, в настоящем варианте осуществления, все тормозные силы, которые прикладываются к буксируемым транспортным средствам 2a-2c, прекращают действовать во время (M) на фиг. 4, и тяговая сила Ftow буксирующего транспортного средства 1 увеличивается до значения, показанного в нижеприведенной формуле (7).
Ftow=(MC+MB+MC)*aref+μC*MC+μB*MB+μA*MA+μtow*Mtow (6)
Здесь, μtow является коэффициентом сопротивления крену колес буксирующего транспортного средства 1, и Mtow является общим весом буксирующего транспортного средства 1.
Как результат, можно ускорять комбинированное транспортное средство при целевом ускорении aref, в состоянии, в котором величина растягивания сцепок 4a-4c комбинированного транспортного средства задается равной величине растягивания, идентичной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref.
В настоящем варианте осуществления, как описано выше, заданная тормозная сила последовательно прикладывается буксируемым транспортным средствам 2a-2c до того, как комбинированное транспортное средство трогается с места, при пошаговом увеличении тяговой силы буксирующего транспортного средства 1. В этом случае, растягивающие нагрузки, которые прикладываются к сцепкам 4a-4c комбинированного транспортного средства, выполнены с возможностью, соответственно, достигать заданных пороговых значений, которые задаются для каждой сцепки, в состоянии, в котором тяговая сила буксирующего транспортного средства 1 и тормозные силы буксируемых транспортных средств 2a-2c находятся в сбалансированном состоянии (т.е. прикладывание больших тормозных сил к буксируемым транспортным средствам 2a-2c по мере того, как растягивающие нагрузки, которые должны прикладываться к сцепкам 4a-4c посредством тяговой силы буксирующего транспортного средства 1, увеличиваются). Как результат, величина растягивания сцепок 4a-4c может задаваться равной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref. Следовательно, в настоящем варианте осуществления, сцепки 4a-4c надлежащим образом удлиняются до того, как комбинированное транспортное средство фактически трогается с места, и посредством дополнительного увеличения тяговой силы буксируемого транспортного средства 1 в этом состоянии, чтобы фактически выполнять трогание с места комбинированного транспортного средства, можно надлежащим образом подавлять толчки и вибрации буксируемых транспортных средств 2a-2c, которые вызываются посредством растягивания и сжатия сцепок 4a-4c, когда комбинированное транспортное средство трогается с места.
В качестве технологии для подавления толчков и вибраций таких буксируемых транспортных средств, традиционно известна технология, в которой увеличение ускорения подавляется сразу после того, как комбинированное транспортное средство ускоряется для того, чтобы трогаться с места, и после этого, ускорение увеличивается после того, как определенная величина растягивающей нагрузки прикладывается между буксируемыми транспортными средствами. Тем не менее, в предшествующем уровне техники, описанном выше, поскольку увеличение ускорения подавляется некоторое время после начала ускорения комбинированного транспортного средства, начальное движение комбинированного транспортного средства задерживается, и требуется длительный период времени до тех пор, пока комбинированное транспортное средство не достигнет целевого ускорения.
Напротив, в настоящем варианте осуществления, посредством прикладывания тормозной силы к буксируемым транспортным средствам 2a-2c до того, как комбинированное транспортное средство фактически трогается с места, при пошаговом увеличении тяговой силы буксирующего транспортного средства 1, можно переводить растягивание сцепок 4a-4c комбинированного транспортного средства на надлежащие уровни за меньшее количество времени. За счет этого можно быстро ускорять комбинированное транспортное средство при подавлении толчков и вибраций, которые возникают в буксируемых транспортных средствах 2a-2c при трогании с места комбинированного транспортного средства.
В примере, описанном выше, показан пример, в котором тормозная сила прикладывается в порядке от буксируемого транспортного средства, которое расположено на задней стороне комбинированного транспортного средства, т.е. в порядке буксируемого транспортного средства 2c, буксируемого транспортного средства 2b и буксируемого транспортного средства 2a; тем не менее, порядок, в котором прикладывается тормозная сила, не ограничен этим примером. Помимо этого, в настоящем варианте осуществления, число буксируемых транспортных средств, к которым прикладывается тормозная сила, также не ограничено конкретным образом, и достаточно, если тормозная сила прикладывается, по меньшей мере, к одному буксируемому транспортному средству. Например, в комбинированном транспортном средстве, проиллюстрированном на фиг. 1, тормозная сила может прикладываться только к двум буксируемым транспортным средствам, буксируемому транспортному средству 2b и буксируемому транспортному средству 2a, в порядке буксируемого транспортного средства 2b и буксируемого транспортного средства 2a. В этом случае, сцепка 4b, соединенная с буксируемым транспортным средством 2b, и сцепка 4a, соединенная с буксируемым транспортным средством 2a, удлиняются. Альтернативно, в комбинированном транспортном средстве, проиллюстрированном на фиг. 1, тормозная сила может прикладываться только к буксируемому транспортному средству 2c. В этом случае, сцепка 4c, соединенная с буксируемым транспортным средством 2c, удлиняется.
Дополнительно, в настоящем варианте осуществления, при остановке комбинированного транспортного средства, которое трогается с места и движется в требуемое местоположение, комбинированное транспортное средство может быть остановлено перед целевым местоположением остановки, которое задается заранее, при подготовке к следующему началу движения. Как результат, в сценарии, в котором остановленное комбинированное транспортное средство в дальнейшем трогается с места, можно не допускать выход за пределы, посредством местоположения комбинированного транспортного средства, целевого местоположения остановки, даже когда комбинированное транспортное средство движется вперед вследствие растягивания сцепок, при выполнении управления комбинированного транспортного средства, как показано на фиг. 3A-3C и фиг. 4, описанных выше.
Поскольку комбинированное транспортное средство настоящего варианта осуществления сконфигурировано и работает так, как описано выше, получаются следующие преимущества.
[1] Согласно настоящему варианту осуществления, когда комбинированное транспортное средство трогается с места, тормозная сила прикладывается в порядке от буксируемого транспортного средства, которое расположено на задней стороне, из множества буксируемых транспортных средств, которые буксируются посредством буксирующего транспортного средства. В этом случае, когда растягивающие нагрузки, которые прикладываются к сцепкам, которые соединяются с соответствующими буксируемыми транспортными средствами, достигают заданных пороговых значений, которые задаются заранее для каждой сцепки, прекращают действовать все тормозные силы, которые прикладываются к буксируемым транспортным средствам. Как результат, каждая сцепка удлиняется до длины, которая является эквивалентной случаю, в котором комбинированное транспортное средство ускоряется при целевом ускорении aref, в момент времени, в который буксирующее транспортное средство начинает ускоряться для того, чтобы трогаться с места, и появляется возможность быстро ускорять комбинированное транспортное средство при подавлении толчков и вибраций буксируемых транспортных средств.
[2] Согласно настоящему варианту осуществления, поскольку большая тормозная сила прикладывается к буксируемым транспортным средствам, которые соединяются со сцепками, по мере того, как растягивающие нагрузки, которые должны прикладываться к сцепкам, увеличиваются, можно более надлежащим образом удлинять сцепки до того, как комбинированное транспортное средство трогается с места; в силу этого толчки и вибрации буксируемых транспортных средств подавляются более значительно.
[3] Согласно настоящему варианту осуществления, поскольку прикладывание тормозной силы к буксируемым транспортным средствам выполняется в то время, когда буксируемые транспортные средства остановлены, можно удлинять сцепки до соответствующей длины за короткий период времени, до того, как комбинированное транспортное средство трогается с места.
[4] Согласно настоящему варианту осуществления, при остановке комбинированного транспортного средства, которое трогается с места в требуемом местоположении, тормозная сила прикладывается к буксируемым транспортным средствам таким образом, что комбинированное транспортное средство останавливается перед целевым местоположением остановки, которое задается заранее. Как результат, при последующем трогании с места комбинированного транспортного средства, даже если комбинированное транспортное средство перемещается вперед вследствие растягивания сцепок, через управление, как показано на фиг. 3A-3C и фиг. 4, описанных выше, комбинированное транспортное средство не должно выходить за пределы целевого местоположения остановки до трогания с места, и можно плавно выполнять последующее трогание с места комбинированного транспортного средства.
[5] Работа и преимущества, описанные выше, получаются в соответствии с устройством управления торможением настоящего варианта осуществления.
Выше описаны варианты осуществления настоящего изобретения, но эти варианты осуществления описываются для того, чтобы упрощать понимание настоящего изобретения, и не описываются для того, чтобы ограничивать настоящее изобретение. Следовательно, элементы, раскрытые в вышеприведенных вариантах осуществления, имеют намерение включать в себя все конструктивные модификации и эквиваленты, которые попадают в объем настоящего изобретения.
В варианте осуществления, описанном выше, тормоза 24a-24c буксируемых транспортных средств 2a-2c соответствуют тормозному устройству настоящего изобретения, и устройство 111 управления торможением буксирующего транспортного средства 1 соответствует устройству управления торможением настоящего изобретения.
Перечень ссылочных позиций
1 - буксирующее транспортное средство
11 - контроллер комбинированного транспортного средства
111 - устройство управления торможением
112 - устройство управления приведением в действие
12 - модуль приведения в движение
2a-2c - буксируемое транспортное средство
21a-21c - нагрузка
22a-22c - устройство управления
23a-23c - рабочая тормозная схема
24a-24c - тормоз
3 - сцепная схема
4a-4c – сцепка.
Предложен способ управления тормозным устройством, которое управляет тормозной силой буксируемых транспортных средств в комбинированном транспортном средстве. Комбинированное транспортное средство содержит буксирующее транспортное средство и множество буксируемых транспортных средств. Сцепление между буксирующим и буксируемыми транспортными средствами выполняется посредством сцепок. После того как буксируемое транспортное средство, которое расположено на самой задней стороне, принудительно прекращает перемещение, прикладывают тормозную силу ко множеству буксируемых транспортных средств с началом в порядке от буксируемого транспортного средства, расположенного на задней стороне. Предложено также устройство управления торможением. Достигается повышение комфорта, надежности. 2 н. и 4 з.п. ф-лы, 6 ил.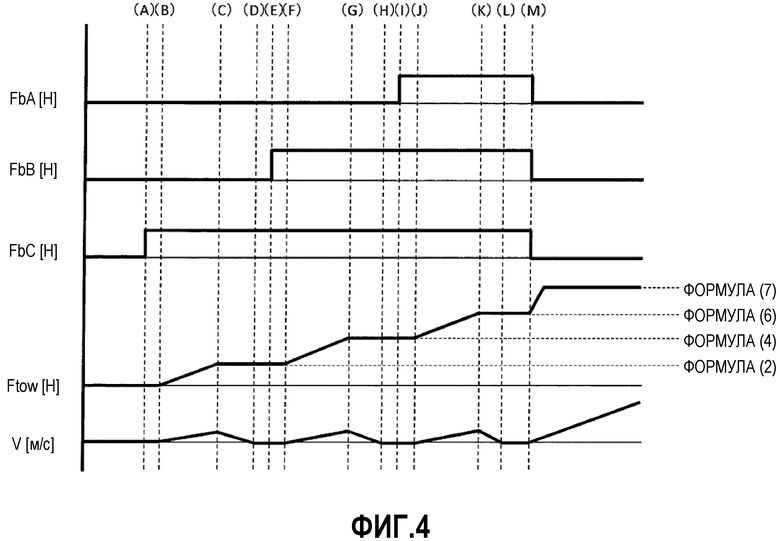
1. Способ управления тормозным устройством, которое управляет тормозной силой буксируемых транспортных средств в комбинированном транспортном средстве, имеющем буксирующее транспортное средство и множество буксируемых транспортных средств, буксируемых посредством буксирующего транспортного средства, причем сцепление между буксирующим транспортным средством и буксируемым транспортным средством и сцепление между буксируемыми транспортными средствами выполняются посредством сцепок, при котором:
после того, как буксируемое транспортное средство, которое расположено на самой задней стороне, принудительно прекращает перемещение, прикладывают тормозную силу ко множеству буксируемых транспортных средств, буксируемых посредством буксирующего транспортного средства, с началом в порядке от буксируемого транспортного средства, расположенного на задней стороне.
2. Способ управления тормозным устройством по п. 1, при котором прекращают действия всех тормозных сил, которые прикладываются к буксируемым транспортным средствам, когда растягивающие нагрузки, прикладываемые к сцепкам, соединяющим соответствующие буксируемые транспортные средства, достигают заданных пороговых значений, которые задаются заранее для каждой сцепки после того, как тормозная сила прикладывается к, по меньшей мере, одному буксируемому транспортному средству.
3. Способ управления тормозным устройством по п. 1 или 2, при котором прикладывание тормозной силы к буксируемым транспортным средствам выполняют в то время, когда буксируемые транспортные средства остановлены.
4. Способ управления тормозным устройством по любому из пп. 1-3, при котором прикладывание тормозной силы к буксируемым транспортным средствам выполняют таким образом, что комбинированное транспортное средство останавливается перед целевым местоположением остановки, которое задается заранее, при остановке буксирующего транспортного средства, которое движется.
5. Способ управления тормозным устройством по любому из пп. 1-4, при котором прикладывание тормозной силы к буксируемым транспортным средствам, соединенным со сцепками, увеличивают по мере того, как увеличиваются растягивающие нагрузки, которые должны прикладываться к сцепкам.
6. Устройство управления торможением для управления тормозным устройством, которое управляет тормозной силой буксируемых транспортных средств в комбинированном транспортном средстве, имеющем буксирующее транспортное средство и множество буксируемых транспортных средств, буксируемых посредством буксирующего транспортного средства, причем сцепление между буксирующим транспортным средством и буксируемым транспортным средством и сцепление между буксируемыми транспортными средствами выполняются посредством сцепок, выполненное с возможностью:
после того, как буксируемое транспортное средство, которое расположено на самой задней стороне, принудительно прекращает перемещение, прикладывания тормозной силы ко множеству буксируемых транспортных средств, буксируемых посредством буксирующего транспортного средства, с началом в порядке от буксируемого транспортного средства, расположенного на задней стороне.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Устройство для перераспределения нагрузок между сцепными и поддерживающими осями локомотива | 1948 |
|
SU86756A1 |
| Поглощающий пружинно-фрикционный аппарат для железнодорожных вагонов | 1947 |
|
SU74067A1 |

